KR20200037318A - 초음파 공진 모터 - Google Patents
초음파 공진 모터 Download PDFInfo
- Publication number
- KR20200037318A KR20200037318A KR1020207005831A KR20207005831A KR20200037318A KR 20200037318 A KR20200037318 A KR 20200037318A KR 1020207005831 A KR1020207005831 A KR 1020207005831A KR 20207005831 A KR20207005831 A KR 20207005831A KR 20200037318 A KR20200037318 A KR 20200037318A
- Authority
- KR
- South Korea
- Prior art keywords
- link member
- link
- vibrating
- stator
- bending
- Prior art date
Links
- 238000005452 bending Methods 0.000 claims abstract description 105
- 239000000463 material Substances 0.000 claims description 26
- 238000000034 method Methods 0.000 claims description 26
- 239000002184 metal Substances 0.000 claims description 20
- 230000008859 change Effects 0.000 claims description 8
- 238000006073 displacement reaction Methods 0.000 claims description 6
- 230000010355 oscillation Effects 0.000 claims description 4
- 230000005611 electricity Effects 0.000 claims 1
- 230000009471 action Effects 0.000 description 8
- 230000000694 effects Effects 0.000 description 5
- 230000002829 reductive effect Effects 0.000 description 5
- 230000003313 weakening effect Effects 0.000 description 5
- 230000000712 assembly Effects 0.000 description 4
- 238000000429 assembly Methods 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 230000009286 beneficial effect Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 230000036316 preload Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 230000012447 hatching Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 230000010363 phase shift Effects 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 208000037408 Device failure Diseases 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000000386 athletic effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 239000003989 dielectric material Substances 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000009429 electrical wiring Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 230000001151 other effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/103—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors by pressing one or more vibrators against the rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/0015—Driving devices, e.g. vibrators using only bending modes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/002—Driving devices, e.g. vibrators using only longitudinal or radial modes
- H02N2/0025—Driving devices, e.g. vibrators using only longitudinal or radial modes using combined longitudinal modes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0065—Friction interface
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
초음파 전기기계 고정자(10)는, 2개의 진동체(20), 연결 방향(X)을 따라 상기 2개의 진동체를 연결하는 링크 부재(30), 및 고정자 지지체를 구비한다. 각 진동체는, 각각의 전기기계 소자(23)를 구비하고, 교류 전압이 그 전기기계 소자들에 인가될 때, 굽힘 방향(Z)으로 굽힘 진동들을 행하도록 구성된다. 상기 링크 부재는, 상기 진동체들에 대해 각각의 기계적 링크 연결 부분들(32)을 갖는다. 각 진동체는, 상기 연결 방향과 상기 굽힘 방향 양쪽을 가로지르는 방향으로, 상기 각각의 진동체들의 적어도 하나의 측면에 있는 적어도 2개의 어태치먼트 탭들(12)에 의해 상기 고정자 지지체에 기계적으로 부착되어 있다. 또한, 상기 초음파 전기기계 고정자를 갖는 초음파 전기기계 모터(1)가 개시되어 있다.
Description
제안된 기술은 일반적으로 전기기계 모터에 관한 것으로, 특히 초음파 영역에서 진동하는 전기기계 재료로 이루어진 진동소자를 활용하는 전기기계 모터들과 이러한 모터들을 구동하는 방법들에 관한 것이다.
종래 기술에서 전기기계 구동 소자들은 많은 유형의 소형 모터 애플리케이션들에 사용되어 왔다. 이러한 모터들의 대부분은 전기기계 구동 소자들의 초음파 동작을 기초로 한다. 전기기계 재료들의 전형적인 예는 압전기, 전기 왜곡 및 반강 유전 재료들이고, 이러한 재료들은 단결정질 뿐만 아니라 다결정질 또는 비결정질일 수 있다.
압전기 재료들은 상대적 단순함 때문에 압전 효과의 활성화에 사용하는데 일반적이다. 많은 다른 설계들이 이용 가능하다. PiezoWave® 모터에서, 압전기 봉은 공진에 투입된다. 봉에 구동 패드는 이동하는 몸체와 접촉하고 있고, 구동 패드의 운동은 이동되는 몸체에 관련된 이동 행위에 전달된다. 이 간결한 결론은 많은 유형의 애플리케이션들에 유리하게 사용되어왔다. 그러나, 이 해결방법의 한 가지 사소한 단점은 모터가 압전 소자를 다룰 수 있는 예비하중량에 제한된다는 것이다. 너무 높은 예비하중은 소자 파손 위험을 증가시킬 것이다. 이것은 이용가능한 출력 힘을 제한할지도 모른다.
공개된 국제 특허 출원번호 WO2004/112232와 WO2005/031888 A1에 있어서, 덜 단단한 부분을 통해 판금의 진동을 일으키는 압전 소자들로 이루어진 모터들이 개시되어 있다. 따라서, 이러한 연결부분은, 공진기들 사이에서 링크로서 작동하고, 적절한 설계들에 의해 압전 소자들을 수반하지 않고 높은 예비하중을 견뎌낼 수도 있다.
또한, 많은 다른 설계들은, 예를 들면 US 2011/0025169 A1, CN 203039613 U 또는 US 8,013,496 B2에 개시된 바와 같이, 진동소자 사이에서 링크들을 사용하고 있다.
압전 소자들은 중앙 링크 섹션이 타원궤적을 갖게 하는데 사용되는 위상변위 진동들을 일으킬 수 있다. 그러나, 그 링크가 몸체를 구동할 수 힘뿐만 아니라, 구동 방향과 양력 방향으로의 그 궤적의 진폭은, 많은 다른 설계 및/또는 동작 파라미터들에 의해 일반적으로 영향을 받는다. 재생가능하고, 강건하고 제어 가능하며, 그와 동시에 높은 힘 또는 고속 또는 저소비 전력을 제공하는 구성을 찾는 것은 어려웠다.
일반적인 목적은 진동체들 사이에 링크를 가진 초음파 전기기계 모터들 동작의 강건성을 향상시키는 것이다.
상기 목적은 독립항들에 따른 방법들과 장치들에 의해 달성된다. 바람직한 실시예들은 종속항들에 기재되어 있다.
일반적인 단어에 있어서, 제1 측면에서, 초음파 전기기계 고정자는 2개의 진동체와, 연결 방향을 따라 그 2개의 진동체를 연결하는 링크 부재와, 고정자 지지체를 구비한다. 각 진동체는 각각의 전기기계 소자를 구비한다. 각 진동체는, 교류 전압이 각각의 전기기계 소자에 인가될 때, 연결 방향을 가로지르는 굽힘 방향으로 굽힘 진동들을 행하도록 구성된다. 링크 부재는, 이동되는 몸체의 표면에 접촉하도록 구성된 접촉 부분을 가진다. 링크 부재는, 연결 방향으로 진동체들에 대해 각각의 기계적 링크 연결 부분을 가진다. 기계적 링크 연결 부분은 초음파 전기기계 고정자의 임의의 다른 부분에 대한 링크 부재의 유일한 기계적 어태치먼트(attachment)이다. 2개의 진동체와 상기 링크 부재는 함께 진동 조립체를 구성한다. 각 진동체는, 연결 방향과 굽힘 방향 둘 다를 가로지르는 방향으로, 각각의 진동체들의 적어도 하나의 측면에 있는 적어도 2개의 어태치먼트 탭들에 의해 고정자 지지체에 기계적으로 부착되어 있다. 어태치먼트 탭들은, 연결 방향과 굽힘 방향 둘 다 가로지르는 방향으로 설치되어서, 연결 방향과 굽힘 방향 둘 다 가로지르는 방향으로 진동체들의 기계적 병진운동이 반작용된다.
제2 측면에서, 초음파 전기기계 모터는, 제1 측면에 따른 초음파 전기기계 고정자를 구비한다. 초음파 전기기계 모터는, 이동되는 몸체와, 수직항력을 제공하기 위한 수단 및 전원장치를 더 구비한다. 이동되는 몸체에는 링크 부재의 접촉 부분에 대해 접촉 표면이 배치되어 있다. 수직항력을 제공하기 위한 수단은, 이동되는 몸체와 초음파 전기기계 고정자 사이에 수직항력을 제공하도록 구성된다. 전원장치는, 2개의 진동체에 전압을 독립적이고 제어 가능하게 제공하도록 구성된다.
제안된 기술의 하나의 이점은, 모터가 보다 높은 출력 힘, 보다 높은 출력 속도 및/또는 재생 가능한 방식으로 저감된 소비전력을 이룰 가능성을 제공한다는 것이다. 그 밖의 이점들은 상세 설명을 읽으면 알 것이다.
본 발명의 또 다른 목적과 이점들은, 아래의 첨부도면과 함께 이하의 설명을 참조함으로써 아주 잘 이해될 수도 있다:
도 1a-1e는 진동 조립체의 일 실시예의 진동체 우세(dominating) 대칭 진동 공진 모드들을 도시한 것이고;
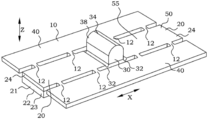
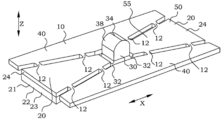
도 2는 초음파 전기기계 고정자의 실시예의 정면도이고;
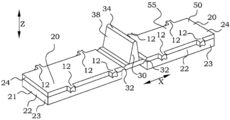
도 3은 초음파 전기기계 고정자의 다른 실시예의 정면도이고;
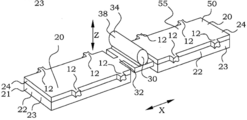
도 4는 테이퍼형 진동체들을 갖는 초음파 전기기계 고정자의 또 다른 실시예의 정면도이고;
도 5a-5d는 진동 조립체의 일 실시예의 링크 우세 대칭 진동 공진 모드들을 도시한 것이고;
도 6a-6e는 진동 조립체들의 실시예들의 정면도이고;
도 7은 초음파 전기기계 모터의 실시예를 개략적으로 도시한 것이고;
도 8은 초음파 전기기계 회전 모터의 실시예를 개략적으로 도시한 것이며;
도 9는 진동 조립체의 실시예의 기계적인 공진 특성을 나타내는 도면이다.
도 1a-1e는 진동 조립체의 일 실시예의 진동체 우세(dominating) 대칭 진동 공진 모드들을 도시한 것이고;
도 2는 초음파 전기기계 고정자의 실시예의 정면도이고;
도 3은 초음파 전기기계 고정자의 다른 실시예의 정면도이고;
도 4는 테이퍼형 진동체들을 갖는 초음파 전기기계 고정자의 또 다른 실시예의 정면도이고;
도 5a-5d는 진동 조립체의 일 실시예의 링크 우세 대칭 진동 공진 모드들을 도시한 것이고;
도 6a-6e는 진동 조립체들의 실시예들의 정면도이고;
도 7은 초음파 전기기계 모터의 실시예를 개략적으로 도시한 것이고;
도 8은 초음파 전기기계 회전 모터의 실시예를 개략적으로 도시한 것이며;
도 9는 진동 조립체의 실시예의 기계적인 공진 특성을 나타내는 도면이다.
도면 전체에 걸쳐서, 동일한 참조번호들은 유사하거나 대응한 요소들에 사용된다.
여기에서 제시된 기술은 전기적 액티브 액추에이터 재료들의 동작에 근거한 전기기계 모터에 관한 것이다. 액추에이터 재료들은 전기기계 재료들로서 특징지어졌지만, 본 개시내용에서는 전기 전압 및 전류가 인가될 때 그들의 형상을 변화시키는 재료들을 의미한다. 전기기계 재료들의 일반적인 예들은 압전기 재료, 전기변형 재료, 반강유전체 재료이고, 이러한 재료들은 단결정질 뿐만 아니라 다결정질 또는 비결정질일 수도 있다.
여기서 아래에 제시된 실시예들에서는, 압전기 재료들을 가정하였지만, 단지 일례로서 가정된 것일 뿐이다.
여기서 아래에 설명된 고정자들과 모터들은 일반적으로 직선 운동 또는 회전 운동을 얻는데 사용될 수 있다. 전기기계 재료들은 일반적으로 AC 전압을 인가하여 초음파 영역에서 작동된다.
제안된 기술의 더 나은 이해를 위해, 기본 운동 원리들의 간략한 개요로 시작하는 것이 유용할 수 있다.
도 1a는 횡단면도에서 진동 조립체 50의 실시예를 도시한 것이다. 진동 조립체 50은 링크 부재 30에 의해 연결 방향을 따라 연결된, 2개의 진동체 20을 구비한다. 링크 부재 30은 (여기서 미도시된) 이동되는 몸체의 표면에 접촉하기 위한 접촉 부분 34를 가지는 드라이브 패드 38을 구비한다. 링크 부재는 연결 방향 X로 각각의 진동체에 기계적 링크 연결 부분들 32를 가진다. 기계적 링크 연결 부분들 32는 진동 조립체 50이 일부인 초음파 전기기계 고정자의 임의의 다른 부분에 대한 유일한 기계적 어태치먼트들이다. 진동체들 20은 각각의 전기기계 소자 23을 구비한다. 각 진동체 20은, 교류 전압이 각각의 전기기계 소자 23에 인가될 때, 연결 방향 X를 가로지르는, 굽힘 방향 Z로 굽힘 진동을 행하도록 구성된다. 즉, 굽힘 방향 Z는 연결 방향 X에 비평행한다.
도 1b는 도 1a의 진동 조립체의 경우를 도시한 것으로, 전기기계 소자들 23이 각 진동체 30을 구부러지게 하는 각각의 전압에 의해 여기되어 있는 것을 도시한 것이다. 이러한 상황에서, 양쪽 진동체 20의 연결 단부 27뿐만 아니라 자유 단부 25도, 도면에 도시된 것처럼, 약간 상향으로 구부러져 있는 한편, 양쪽 진동체 20의 중앙 부분 26은 약간 하향으로 구부러져 있다. 연결 단부 27의 상향 스트로크는, 전체 링크 부재 30이 Z방향으로 상향으로, 즉 (여기서는 미도시된) 이동되는 상기 구성된 몸체를 향하여 병진운동되게 할 것이다. 진동체들 20의 굽힘이 필수적으로 같으므로, 링크 부재 30의 운동은 필수적으로 Z방향으로 순수한 병진운동이 될 것이다. 기계적 링크 연결 부분 32는 연결 단부 27의 회전을 보상하기 위해 굽혀지고, 링크 부재 30의 주된 부분은 필수적으로 굽혀지지 않는다.
도 1c는 유사한 상황을 도시한 것이지만, 양쪽 진동체 30의 자유단부 25와 연결 단부 27은 하향으로, 즉, 이동되는 몸체로부터 떨어지는 방향으로 향해진다. 연결 단부 27의 하향 스트로크는, 전체 링크 부재 30을 Z방향 즉, (여기서는 미도시된) 이동되는 상기 구성된 몸체로부터 떨어지는 방향)으로 하향 병진운동되게 할 것이다. 또한, 여기서의 진동체들 20의 굽힘이 필수적으로 같으므로, 링크 부재 30의 운동은 필수적으로 Z방향으로 순수한 병진운동이 될 것이다. 기계적 링크 연결 부분들 32는 도 1b와 비교하여 반대 방향으로, 연결 단부들 27의 회전을 보상하도록 굽혀지고, 링크 부재 30의 주된 부분은 필수적으로 굽혀지지 않는다.
도 1b와 도 1c 모두는 진동 조립체 공진 모드의 일반적인 순간적 상황을 도시한 것이다. 여기서, 이 공진 모드는 진동체 우세 대칭 진동 공진 모드를 의미하는데, 그 이유는, 공진 모드에서의 운동의 대부분이 진동체들에 의해 수행되어지고, 진동체들의 진동들이 필수적으로 대칭적이기 때문이다. 공진 모드는 Z방향으로, 즉, 도면들에서 상하로, 또는 이동되는 몸체를 향하여 떨어지는 방향으로, 접촉 부분 34를 움직이게 한다.
도면들에서 진동의 스트로크들은 이해 가능한 방식으로 조건들을 시각화시키기 위해서 설명 목적을 위해 엄청나게 과장되어지는 것을 주목한다.
도 1d는 도 1a의 진동체의 상황을 도시한 것으로, 여기서, 전기기계 소자들 23이 각 진동체 30을 구부러지게 각각의 역전압에 의해 여기되어 있다. 이러한 상황에서, 하나의 진동체 20의 연결 단부 27뿐만 아니라 자유 단부 25도, 왼쪽 부분 도면에 도시된 것처럼, 약간 상향으로 굽혀지고, 왼쪽 진동체 20의 중앙 부분 26이 약간 하향으로 굽혀진다. 마찬가지로, 나머지 진동체 20의 연결 단부 27뿐만 아니라 자유 단부 25도, 오른쪽 부분 도면에 도시된 것처럼, 약간 하향으로 굽혀지고, 왼쪽 진동체 20의 중앙 부분 26은 약간 상향으로 굽혀진다. 연결 단부들 27 중 하나의 상향 스트로크와 연결 단부들 27의 나머지의 하향 스트로크는, 전체 링크 부재 30을, X방향으로, 즉, (여기서는 미도시된) 이동되는 몸체를 상기 구성된 운동 방향으로, 오른쪽으로 경사지게 할 것이다. 진동체들 20의 굽힘이 필수적으로 비대칭적이므로, 링크 부재 30의 운동은 X방향으로 순수한 틸팅(tilting)이 필수적일 것이다. 기계적 링크 연결 부분들 32는 각각의 연결 단부들 27의 회전을 보상하기 위해 굽혀지는 반면에, 링크 부재 30의 주된 부분은 필수적으로 굽혀지지 않는다.
도 1e는, 유사한 상황을 도시한 것이지만, 여기서는 진동체들 30이 반대의 방식으로 여기된 것을 도시한 것이다. 연결 단부들 27의 스트로크들은, 전체 링크 부재 30을, X방향으로, 즉 도 1d와 비교하여 반대 방향으로 기울어지게 할 것이다. 기계적 링크 연결 부분들 32는, 도 1d와 비교해 반대 방향으로, 연결 단부 27의 회전을 보상하기 위해 굽혀지고, 링크 부재 30의 주된 부분은 필수적으로 굽혀지지 않는다.
도 1d와 도 1e 모두는, 진동 조립체의 다른 공진 모드의 대표적인 순간 상황들이다. 여기서, 이 공진 모드는, 진동체 우세 비대칭 진동 공진 모드를 의미하는데, 그 이유는, 공진 모드에서의 운동의 대부분이 진동체들에 의해 수행되고, 진동체들의 진동들이 필수적으로 비대칭적이기 때문이다. 진동 모드는, X방향으로, 즉 도면들에서의 오른쪽과 왼쪽으로, 또는 이동되는 몸체를 따라, 접촉 부분 34를 움직이게 한다.
도 1b-1e에서, 해칭은 도면을 더 알아보기 쉽게 하기 위해서 제거되어 있다.
자유 진동들을 위한 공진 모드를 갖는 2개의 진동체가 서로 연결되어 있을 때, 그 연결은 2개의 진동체 사이에서의 운동과 에너지의 전달을 야기시킬 것이다. 자유 진동들을 위한 공진 모드는, 상술한 모드들을 참고하여, 전체 조립체의 2개의 공진 모드, 즉 진동체들의 대칭 진동들을 갖는 모드와 진동체들의 비대칭 진동들을 갖는 모드로 조합할 것이다. 대표적인 경우는, 대칭 공진 모드가 비대칭 공진 모드보다 더 낮은 주파수에서 나타날 것이라는 것이다. 따라서, 상기 예들에서, 대표적인 경우는, 진동체 우세 대칭 진동 공진 모드가 진동체 우세 비대칭 진동 공진 모드의 공진 주파수보다 더 낮은 공진 주파수를 갖는 경우이다. 일반적으로, 링크가 단단하면 할수록, 2개의 진동 모드들의 공진 주파수의 차이가 더 커진다.
여기에서 제시된 기술에서, 위에 제시된 2개의 진동 모드는 운동을 일으키는데 사용된다. 전기기계 모터는, 고정자와, 마찰 접촉을 통해 고정자에 의해 이동되는 몸체를 기초로 한다. 고정자는, 초음파 주파수 범위내에서 진동될 수 있고, 타원궤적에서 진동할 접촉 영역을 갖는다.
진동체들은 2개의 진동체에 적어도 2개의 상변화 신호들의 AC 전압을 통해 진동된다. 동작 주파수는, 접촉 부분을 타원 운동하게 하는 진동체들의 진동 조립체의 공진 모드들의 자연적 공진 주파수들의 부근에서 선택될 수도 있다. 접촉 부분은, 이 타원 운동을 이동되는 몸체의 병진운동으로 전달할 수도 있고, 이때 Z방향으로의 운동은 접촉 부분을 이동되는 몸체에 접촉시키고 접촉 부분을 이동되는 몸체로부터 분리시키는 것에 책임이 있고, X방향으로의 운동은 실제의 병진운동에 대해 책임이 있고, 이동되는 몸체에 접촉 없이 접촉 부분의 수축하는 것에 대해 책임이 있다. 이 때문에, 이러한 원리들은, 종래기술에서 잘 알려져 있다.
상기 운동을 달성하기 위해서는, 진동 조립체와 이동되는 몸체 사이에 수직항력이 인가되어야 한다. 즉, 진동체 사이에 일부의 기계적 연결이 있어야 하거나, 또는 상기 링크와 수직항력 인가수단 사이에는 링크가 있어야 한다. 이러한 어태치먼트 구성은, 어느 정도는 진동 작용에 영향을 미칠 것이다. 어태치먼트 구성은, 수직항력을 중재할 수 있을만큼 충분히 강해야 한다. 동시에, 어태치먼트 구성은, 충분히 약해야 하고, 가능한 한 적게 공진 작용을 방해하는 방식으로 배치되어야 한다.
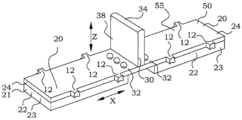
도 2는 초음파 전기기계 고정자 10의 실시예의 개략도를 도시한 것이다. 초음파 전기기계 고정자 10은 링크 부재 30에 의해 연결된 2개의 진동체 20을 구비한다. 링크 부재 30은 연결 방향 X를 따라 2개의 진동체 20을 연결한다. 링크 부재 30은 연결 방향 X로 각각의 진동체 20에 기계적 링크 연결 부분들 32를 가진다. 기계적 링크 연결 부분들 32는 초음파 전기기계 고정자 10의 임의의 다른 부분에 대한 유일한 기계적 어태치먼트들이다. 그러나, 링크 부재 30은 이동되는 몸체(도시되지 않음)의 표면에 접촉하도록 구성된 접촉 부분 34를 가진다. 본 실시예에서, 그 접촉 부분은 링크 부재 30의 구동 패드 38에 설치된다. 구동 패드 38은 기계적 링크 연결 부분들 32 사이의 연결 라인을 가로지르게 연장되어 있다.
2개의 진동체 20과 연결 부재 30은 함께 진동 조립체 50을 구성한다. 초음파 전기기계 고정자 10은, 진동 조립체 50의 양측에 시트(sheet) 부분들로서 도시된 본 실시예에서는. 고정자 지지체 40을 더 구비한다.
각 진동체 20은 각각의 전기기계 소자 23, 대표적으로는 압전 볼륨 22을 구비한다. 각 진동체 20은, 교류 전압이 각각의 전기기계 소자에 인가될 때, 연결 방향 X를 가로지르는 굽힘 방향 Z로 굽힘 진동들을 수행하도록 구성된다.
본 실시예에서, 각 진동체 20은, 압전 볼륨 22와 진동 소자 탄성 볼륨 24의 조립체, 이 경우에는 금속판으로 이루어진다. 압전 볼륨 22는, 공간적으로 분리된 적어도 2개의 위치에, 그리고 일반적으로는 전체 접촉 영역을 따라 연속적으로, 금속판에 부착되어 있다. 따라서, 이러한 구성은, 따라서 유니모프(unimorph) 부재 21이 생기게 한다. 즉, 압전 볼륨 22의 치수 변화는, 유니모프 부재 21, 즉 여기서는 압전 볼륨 22과 진동 소자 탄성 볼륨 24의 조립체, 즉 금속판의 굽힘을 일으킨다.
즉, 이와 같은 맥락에서, "유니모프"는 전기기계 소자 23와 비전기기계 소자의 조합, 예를 들면 금속판의 의미로서 사용되고, 용어 "바이모프(bimorph)"는 적어도 2개의 전기기계 소자들의 조합의 의미로서 사용된다.
각 진동체 20은, 어태치먼트 탭들 12에 의해 고정자 지지체 40에 기계적으로 부착되어 있다. 어태치먼트 탭들 12는, 각각의 진동체 20의 연결 방향 X와 굽힘 방향 Z 양쪽에 가로지르는 방향으로, 적어도 일측에 설치되어 있다. 즉, 어태치먼트 탭들 12는, 연결 방향 X에 비평행할뿐만 아니라 굽힘 방향 Z에 비평행한 방향으로 설치되어 있다. 각 진동체 20은, 각각의 진동체의 동일측에 2개의 어태치먼트 탭들 12에 의해 고정자 지지체 40에 기계적으로 부착되어 있다. 본 실시예에서, 고정자 지지체가 진동 조립체 50의 양측에 있는 경우에, 2개의 어태치먼트 탭들 12는 진동체들 20의 양측에 설치되어 있다. 즉, 각 진동체 20은, 각각의 진동체 20의 연결 방향 X와 굽힘 방향 Z 양쪽에 가로지르는 방향으로, 각 반대측에 적어도 2개의 어태치먼트 탭들 12에 의해 고정자 지지체 40에 기계적으로 부착되어 있다. 어태치먼트 탭들 12는, 연결 방향 X와 굽힘 방향 Z 양쪽에 가로지르는 방향으로 설치되어 있다. 이것은, 연결 방향 X와 굽힘 방향 Z 양쪽에 가로지르는 방향들로 진동체들의 기계적 병진운동이 반작용되는 것에 이어진다. 어태치먼트 탭들 12와 링크 부재 30의 기계적 링크 연결 부분들 32는, 유선인 경우, 초음파 전기기계 고정자 10의 임의의 다른 부분에의 진동체 20의 유일한 기계적 어태치먼트들이고, 및/또는 전기기계 소자들 23에 전압을 공급하기 위한 다른 회로소자는 무시되어진다. 즉, 이와 같은 맥락에서, "기계적 어태치먼트(mechanical attachments)"는 진동 조립체의 기계적인 진동 특성들에 영향을 주는 어태치먼트들로서 정의된다. 일반적으로, 전기 배선은, "기계적 어태치먼트들"에 포함되지 않는다.
어태치먼트 탭들 12의 설치는, 진동 조립체 50의 진동 작용에 약간의 제한을 둔다. 만약 어태치먼트 탭들 12가 종종 전체 볼륨을 감소시키는 경우인 상대적으로 짧으면, 어태치먼트 탭들에 가까운 진동체의 부분들의 연결 방향 X와 굽힘 방향 Z는 심하게 제한된다. 그러나, 만약 어태치먼트 탭들 12가 합리적으로 좁고 얇으면, 연결 방향 X와 굽힘 방향 Z 양쪽에 가로지르는 축 주위의 어태치먼트 탭들에 가까운 진동체들의 부분들의 회전은 필수적으로 중대한 영향력 없이 허용되어진다.
일측과 동일측상에 진동체들 20과 고정자 지지체 사이에 2개의 어태치먼트 탭들의 설치의 효과는, 한층 더 상술한 것처럼, 진동체 우세 대칭 진동 공진 모드와 진동체 우세 비대칭 진동 공진 모드의 발생과 안정성이 개선된다는 것이다. 따라서, 2개의 어태치머트 탭들이 일측과 동일측상에 진동체들 20과 고정자 지지체 사이에 설치된 고정자에 있어서, 진동 조립체는 명확한 진동 공진 모드들을 갖는다. 진동 공진 모드들의 진동체 우세 대칭 진동 공진 모드는, 진동체 우세 대칭 진동 공진 주파수에서 링크 부재 30 주위에 대칭적인 2개의 진동체들 20의 굽힘 진동들을 나타낸다. 마찬가지로, 진동 공진 모드들의 진동체 우세 비대칭 진동 공진 모드는, 진동체 우세 비대칭 진동 공진 주파수에서 링크 부재 30 주위에 비대칭적인 2개의 진동체들 20의 굽힘 진동들을 나타낸다.
바람직한 실시예에서, 어태치먼트 탭들 12는 진동체 우세 대칭 진동 공진 모드와 진동체 우세 비대칭 진동 공진 모드 중 적어도 하나의 교점들에 위치결정되어 있다. 링크 부재 30이 진동체들에 비교해 상대적으로 약하다면, 2개의 진동 모드들의 이 교점들은 필수적으로 일치한다.
제1 공진 굽힘 진동 모드에서 자유 균일 빔은, 각 끝에서부터 포인트 22.4%에서의 노드들을 이론적으로 달성한다. 진동 조립체에서, 링크에 의해 이러한 2개의 빔이 연결되는 경우, 교점들은 상기 링크의 방향으로 어느 정도 움직인다. 정확한 위치는 링크의 특정한 설계에 좌우된다. 링크에 가장 가까운 교점은, 일반적으로, 자유 단부에 가장 가까운 교점보다 더 변위된다.
상이한 실시예들에서는, 상이한 링크 부재 설계들을 시험하였다. 너무 약한 링크 부재는 구동 패드에 충분한 힘을 제공하는 능력의 약점들이 있다. 이 대신에, 너무 딱딱한 링크 부재는, 연결 단부의 스트로크를 저감시킨다. 가장 유망한 실시예들은 중간 범위에서 발견되어졌다. 직선 빔 진동체들의 상기와 같은 바람직한 진동 조립체들은, 진동체마다, 교점과 이 때문에 어태치먼트 탭의 바람직한 위치와의 사이의 거리, 그리고 기계적 링크 연결 부분들의 가장 가까운 부분이, 진동체의 연결 방향의 길이의 7-20%의 범위내에 있다는 것을 공통적으로 지니고 있었다.
일부의 응용에 있어서, 고정자 지지체 40은 진동 조립체 50의 단지 일측에만 설치되어도 된다. 도 3은, 이러한 초음파 전기기계 고정자 10의 일 실시예를 개략적으로 도시한 것이다. 여기서, 진동체들 20은, 진동체 20의 일측에만 설치된 어태치먼트 탭들 12에 의해 고정자 지지체(40)에 부착되어 있다. 상기 실시예들은, 예를 들면, 회전 움직임을 제공할 때 유용할 수도 있고, 아래에 한층 더 예들을 참고한다. 비대칭 어태치먼트는, 다소 진동 작용에 영향을 미칠 것이다. 그러나, 주된 동작 조건들은 필수적으로 같다.
다른 실시예들에서, 진동체들의 형상은, 진동 특성을 변경하는데 사용될 수 있다. 도 4에는, 초음파 전기기계 고정자 10의 실시예가 도시되어 있다. 본 실시예에서, 진동체들 20은 굽힘 방향 Z에 수직한 평면에서 테이퍼 형상을 가진다. 각각의 좁은 단부는 진동체들 20의 연결 단부 27로서 사용되어서, 링크 부재 30에 연결된다. 각각의 넓은 단부는, 여기서는, 진동체들 20의 자유 단부 25로서 사용된다. 테이퍼 형상은 진동체 20을 따라 선형으로 달라지는 것으로서 도시되어 있다. 그러나, 사용하는 것이 가능한 그 밖의 테이퍼 형상들은 많이 있다. 일반적으로, 테이퍼 형상 진동체들 20은, 직선 빔 실시예들과 비교하여 좁은 단부에서 보다 큰 스트로크 진폭을 나타낸다.
다른 실시예에서, 진동체들의 테이퍼링은 반대 방향으로 제공되어도 되고, 즉, 각각의 넓은 단부는 진동체들의 연결 단부로서 사용되어서 링크 부재에 연결된다. 각각의 좁은 단부는 진동체들의 자유 단부로서 사용된다.
초음파 모터의 에너지 효율은 진동하는 부분들의 상이한 공진 작용들이 사용되면 향상되는 경우도 있다. 그러므로, 고정자의 자연적 공진 주파수에 위치되거나 자연적 공진 주파수에 가까운 동작 주파수를 선택하는 것이 이로운 경우가 있다. 본 형태의 모터에 있어서, 접촉 부분의 타원 운동은, 2개의 공진 진동 모드, 즉, 진동체 우세 대칭 진동 공진 모드와 진동체 우세 비대칭 진동 공진 모드를 조합하여서 이루어진다. 바람직한 동작 주파수는, 관련된 공진 주파수들의 적어도 하나에 가깝게 선택된다. 한층 더 상술한 바와 같이, 2개의 진동체의 링킹은, 단일 자유 진동체의 제1 공진 모드를, 공진 주파수들이 약간 다른 하나의 대칭 공진 모드와 하나의 비대칭 공진 모드로 분할시킬 것이다.
도 9는 주파수 함수로서 접촉 부분의 스트로크를 도시하는 도면으로서 상기 설명에 따른 초음파 모터의 일 실시예의 공진 작용을 개략적으로 도시한 것이다. 곡선 101은 진동체 우세 대칭 진동 공진 모드를 설명하도록 구성되고, 곡선 102는 진동체 우세 비대칭 진동 공진 모드를 설명하도록 구성된다. 진동체들의 링킹은 공진 주파수에서 특정한 차이 103을 발생시키는 의존성을 생성한다.
이 공진 주파수들 사이의 큰 차이는, 공진 주파수들의 최대의 주파수가 각 시간에 상기 선택된 동작 주파수에 가깝게 위치될 수 있게 될 것이다. 한편, 공진 주파수들이 상대적으로 서로 가깝게 위치되면, 양쪽의 공진 모드로부터 일부 공진 기여가 사용되어도 된다.
그러므로, 바람직한 실시예에서, 진동체 우세 대칭 진동 공진 주파수는, 진동체 우세 비대칭 진동 공진 주파수와 10% 미만만큼 상이하다. 즉, 그 차이 103은 진동체 우세 대칭 진동 공진 모드의 주파수의 10% 미만이다.
위에서 간단히 설명한 바와 같이, 진동체들 사이의 강한 연결은 2개의 진동체간의 강한 상호작용을 야기할 것이고, 공진 주파수들의 이격은 일반적으로, 상대적으로 클 것이다. 링크의 "굽힘 강성"을 감소시킴으로써, 진동체들 사이의 상호작용은 감소될 것이고, 대칭 공진 주파수와 비대칭 공진 주파수 사이의 차이는 일반적으로 보다 작을 것이다.
그러나, 링크 부재의 굽힘 강성을 저감시키면, 그 밖의 효과들도 생긴다. 만약 몸체의 2개의 공진 주파수들이 서로 매우 가깝다면, 공진 모드들은 서로 커플링할 것이고, 상이한 종류의 혼합 작용들을 일으킬 것이다. 이러한 혼합 작용들은 상이한 환경하에서는 제어 및 예측하기 매우 어려울 수도 있고, 그러므로, 이러한 상황에서 재현 가능한 결과들을 얻기 위해서, 혼합된 공진 모드들은 바람직하게는 회피되어야 한다.
결론적으로, 일부 응용들에서는, 진동체들 사이의 약한 커플링은 바람직한 것이다. 그러나, 커플링이 너무 약할 수 없는데, 그 이유는, 실제 응용성이 해롭게 영향을 받을 수도 있기 때문이다. 그러므로, 진동체들 사이의 일부의 기계적 커플링결합 정도를 갖는 것이 중요하다. 따라서, 진동체들은, 서로에 약하게 의존되도록 제공되는 것이 필요하다. 이것은, 바람직하게는 공진 주파수 차이가 너무 낮으면 안 된다는 것을 의미한다.
그러므로, 일 실시예에서, 진동체 우세 대칭 진동 공진 주파수는 진동체 우세 비대칭 진동 공진 주파수와 0.2%이상만큼 상이하다. 즉, 그 차이 103은 진동체 우세 대칭 진동 공진 모드의 주파수의 0.2%보다 크다.
위에서 결론 내린 것과 같이, 링크 부재의 특성들은 진동체들에서 우세한 진동들의 커플링에 기여한다. 링크 부재가 진동 특성들에 미치는 영향은 이것뿐만이 아니다. 확장되며 대량의 모든 참여하는 기계적 부품은, 상이한 방식들로 진동에 기여할 것이다. 그것의 기계적 링크 연결 부분이 2개인 링크 부재는, 그 밖의 굽힘 모드들에도 참여할 것이다. 어떤 진동체들에도 연결 없이 자유 링크 부재는, 상이한 굽힘 모드들을 위한 자연적 공진 주파수들을 가질 것이다. 이 공진 모드들은 물론 양측의 진동체들에 연결됨으로써 심하게 영향을 받을 것이다. 또한, 공진 모드들은, 이동되는 몸체와의 접촉으로부터 수축되는 링크 부재와, 이동되는 몸체와 기계적으로 접촉하는 링크 부재에 대해 상이할 것이다.
제1 링크 부재 자유 진동 공진 굽힘 모드에서, 링크 부재는, 기계적 링크 연결 부분들이 같은 방향으로 스크로크들을 갖고 반대 방향으로 중앙 부분에 스트로크를 갖게 구부러진다. 이러한 모드와 2개의 연결 진동체들을 조합하면, 링크 우세 대칭 진동 공진 모드를 나타낼 것이다. 이 링크 우세 대칭 진동 공진 모드는, 링크 부재 주위에 같은 방향들로 스트로크들을 갖는 2개의 진동체들의 굽힘 진동을 나타내서, 어떤 의미에서는 "대칭적"인 것이다. 이러한 공진 모드는 도 5a에 개략적으로 도시되어 있다. 굽힘 방향으로 링크 부재 30의 기계적 링크 연결 부분들 32의 주된 변위는, 전체 링크 부재 30의 변위를 야기한다. 여기에 더하여, 링크 부재 자체의 굽힘은, 링크 부재 30의 중앙 부분, 특히 도면에 도시된 것처럼, 한층 더 상향으로도 접촉 부분 34을 이동시킬 것이다. 기계적 연결 부분들 32의 굽힘은, 이 이전에 설명된 2개의 진공 모드들에서 보다 작고, 그 굽힘을 갖는 보다 큰 부분은 링크 부재 30의 전체 길이내에서 만들어지는 것에 주목한다. 반주기 후의 유사한 상황이, 도 5b에 도시되어 있다. 링크 부재 자체의 무시할 수 없는 기여 때문에, 이 모드는, 여기에서는, 링크 우세 대칭 진동 공진 모드를 의미하고, 링크 우세 대칭 진동 공진 주파수에서 발생한다.
제2 링크 부재 자유 진동 공진 굽힘 모드에서, 링크 부재는, 기계적 링크 연결 부분들이 반대 방향들로 스크로크들을 갖고 중앙 부분에 노드를 갖게 구부러진다. 2개의 연결 진동체들을 가진 이러한 모드를 조합하면, 링크 부재 주위의 반대 방향들로 스트로크들을 갖는 2개의 진동체의 굽힘 진동들은 나타내는 링크 우세 비대칭 진동 공진 모드를 나타낼 것이어서, 어떤 의미에서는 "비대칭적"일 것이다. 이러한 공진 모드는 개략적으로 도 5c에 도시되어 있다. 반대의 굽힘 방향으로 링크 부재 30의 기계적 링크 연결 부분들 32의 변위는, Z방향으로 전체 링크 부재 30의 사소한 변위들만을 야기한다. 대신에, 전체 링크 부재 30의 틸팅이 달성된다. 여기에 더하여, 링크 부재 자체의 굽힘은, 도면에 도시된 것처럼, 링크 부재 30의 중앙 부분을 이동시킬 것이다, 특히 접촉 부분 34를 심지어 한층 더 옆으로 이동시킬 것이다. 기계적 링크 연결 부분들 32의 굽힘은 첫 번째 설명된 2개의 진공 모드들보다 작고 그 굽힘의 보다 큰 부분이 링크 부재 30의 전체 길이내에서 이루어진다는 것에 주목한다. 반주기 후의 유사한 상황이, 도 5d에 도시되어 있다. 링크 부재 자체로의 무시할 수 없는 기여 때문에, 여기서 이 모드는, 링크 우세 비대칭 진동 공진 모드를 의미하고, 링크 우세 비대칭 진동 공진 주파수에서 발생한다.
도 5a-5d에서는, 도면들을 더 알아보기 쉽게 만들기 위해 해칭이 제거되어 있다.
일반적으로, 그러한 링크 우세 공진 모드들을 사용하는 Z 방향과 X 방향으로의 스트로크들은 대응하는 진동체 우세 공진 모드들의 스트로크들보다 작은 것을 알 수 있다. 그러므로, 이러한 링크 우세 공진 모드들에서 여기된 에너지의 대부분은, 정상파의 에너지들로서 링크 부재내에 머무른다고 믿어진다. 이러한 정상파는 링크 부재에서 소멸된 열인 그 에너지를 결국 손실할 것이고, 이에 따라 어떤 운동 활동들에도 기여하지 않고 있는 중이다. 그러므로, 진동체 우세 공진 모드들의 공진 주파수들보다 상당히 더 높은 주파수들에서 이 링크 우세 공진 모드들의 공진 주파수들을 구성하여, 이 모드들에서 어떠한 상당한 에너지도 여기되는 것을 피하는 것이 이롭다.
도 9에서, 링크 우세 대칭 진동 공진은 곡선 104로 나타내고, 링크 우세 비대대칭 진동 공진은 곡선 105로 나타낸다. 링크 우세 대칭 진동 공진의 공진 주파수와 링크 우세 비대칭 진동 공진의 공진 주파수 중 최저 공진 주파수는, 진동체 우세 비대칭 진동 공진의 공진 주파수와 링크 우세 대칭 진동 공진의 공진 주파수 중 최고의 공진 주파수를, 주파수 차이 106만큼 초과한다.
일 실시예에서, 링크 우세 대칭 진동 공진 주파수와 링크 우세 비대칭 진동 공진 주파수 양쪽은, 진동체 우세 비대칭 진동 공진 주파수와 진동체 우세 대칭 진동 공진 주파수 양쪽을 5%이상과 바람직하게는 20%이상 초과한다. 즉, 상기 주파수 차이 106은, 진동체 우세 비대칭 진동 공진 모드의 주파수와 링크 우세 대칭 진동 공진 모드의 주파수 중 최고의 주파수의 5%보다 크고, 바람직하게는 20%보다 크다.
링크 우세 공진 모드들의 공진 주파수들은, 예상대로, 링크 부재의 상이한 특성들에 의해 상당히 영향을 받는다. 얇은 링크 부재는, 일반적으로, 더 두꺼운 링크 부재보다 더 낮은 공진 주파수를 제공할 것이다. 마찬가지로, 긴 링크 부재는, 일반적으로, 짧은 링크 부재보다 낮은 공진 주파수를 제공할 것이다. 또한, 기계적 링크 연결 부분들의 굽힘 강성은 공진 주파수에 영향을 미칠 것이다. 약한 기계적 링크 연결 부분, 즉, 낮은 굽힘 강성을 가지는 기계적 링크 연결 부분은, 일반적으로 높은 굽힘 강성을 가지는 기계적 링크 연결 부분보다 낮은 공진 주파수를 제공할 것이다.
여기서는, 낮은 굽힘 강성이 진동체 우세 공진 모드들 사이의 공진 주파수 차이를 감소시키는데 이롭지만, 힘을 유지하고 진동체 우세 공진 모드들의 주파수들로부터 링크 우세 공진 모드들의 주파수들을 분리시키는데 이롭지 않다는 것을 알아차릴 수 있다. 링크 부재의 길이와 두께에 관하여, 진동체 우세 공진 모드들은 링크 우세 공진 모드들보다 덜 영향을 받는다.
또한, 링크 부재의 질량과 같은 다른 요인들, 특히 구동 패드의 질량은 다른 공진 모드 주파수들 사이의 차이에 영향을 미친다.
실제의 설계 선택들은, 바람직하게는, 모터의 특별한 응용에 적합하다. 가해진 힘에 대한 높은 수요들에 대해, 기계적 링크 연결 부분들은 너무 약하게 하면 안 된다. 그렇지만, 만약 에너지 효율이 더 중요하면, 기계적 링크 연결 부분들은 상대적으로 약하게 될 수 있고, 대신에, 나머지 링크 부재 부품은 링크 우세 공진 모드들이 간섭중이 아닌 것을 보장하도록 보다 단단하게 할 수 있다.
대부분 응용에 있어서, 링크 부재 나머지와 비교해 기계적 링크 연결 부분들의 일부의 약화가 요구되어진다. 이 때문에, 일 실시예에서, 기계적 링크 연결 부분들 중 적어도 하나, 바람직하게는, 양쪽이, 굽힘 진동들의 방향으로 굽힘 강성을 갖는다, 즉, 링크 연결 부분들을 제외한 링크 부재의 굽힘 진동들의 방향으로 50% 미만의 굽힘 강성을 갖는다.
그러나, 너무 약한 기계적 연결 부분은 많은 응용들에서 이득이 되지 않는다. 그러므로, 일 실시예에서, 기계적 링크 연결 부분들 중 적어도 하나, 바람직하게는, 양쪽이, 굽힘 진동들의 방향으로 굽힘 강성을 갖는다, 즉, 링크 연결 부분들을 제외한 링크 부재의 굽힘 진동들의 방향으로 5%보다 높은 굽힘 강성을 갖는다.
기계적 링크 연결 부분의 약화는 상이한 방식으로 달성될 수 있다. 도 6a는, 기계적 링크 연결 부분 굽힘 강성의 적어도 하나와 바람직하게는 양쪽은, 링크 연결 부분들이 굽힘 진동들의 방향으로, 링크 부재의 주된 부분과 진동체들보다 얇도록 구성되는 일 실시예를 도시한 것이다. 즉, 본 실시예에서, 그 약화는 기계적 링크 연결 부분의 상부면 및/또는 하부면으로부터 재료를 파냄으로써 달성된다.
도 6b는, 상기 링크 연결 부분들의 적어도 하나와 바람직하게는 양쪽이, 굽힘 진동들에 수직한 방향으로, 링크 부재의 주된 부분과 진동체들보다 좁은 또 하나의 실시예를 도시한 것이다. 즉, 본 실시예에서, 약화는 기계적 링크 연결 부분의 측면으로부터 재료를 제거함으로써 달성된다.
이것의 또 다른 변형 예는, 기계적 링크 연결 부분들에 구멍들을 제공함으로써, 그것의 효율적인 폭을 저감시키는 것이다. 도 6c는, 링크 연결 부분들의 적어도 하나와 바람직하게는 양쪽이, 구멍들이 구비되어 있어, 굽힘 진동들에 수직한 방향으로, 효율적인 폭을 링크 부재의 주된 부분들과 진동체들보다 좁게 하는 또 하나의 실시예를 도시한 것이다.
도 6d는, 링크 연결 부분들의 적어도 하나와 바람직하게는 양쪽이 링크 부재의 주된 부분들과 진동체들의 재료들보다 덜 단단한 재료로 이루어지는 또 하나의 실시예를 도시한 것이다. 즉, 본 실시예에서, 약화는, 진동체들과 링크 부재의 주된 부분들을 상대적으로 보다 부드러운 재료로 연결함으로써 달성된다.
그 밖의 진동체들과 링크 부재의 설계 선택들은 요청된 응용들에 대해 동작을 변경하는데도 사용되어도 된다. 이를테면, 일반적으로 보다 얇은 진동체들은 접촉 부분이 이동되는 몸체에 작동중일 수 있는 힘을 증가시킨다는 것을 주목을 받고 있다. 연결 방향으로의 힘은 굽힘 방향으로의 힘보다 더 많은 영향을 받는다. 일반적으로, 얇은 진동체들은 접촉 부분의 이동을 위해 보다 큰 진폭을 제공한다. 그 얇은 진동체들에서 우세한 모드들의 공진 주파수들도, 일반적으로, 보다 두꺼운 진동체들보다 낮다. 링크 우세 모드들의 주파수들도 영향을 받지만, 같은 정도로 영향을 받지 않는 것도 주목할 수 있다.
마찬가지로, 만약 링크 부재의 두께가 변경되면, 진동 특성들도 변화된다. 이용 가능한 힘은 상대적으로 두꺼운 링크 부재에 대해 상당히 더 높게 되지만, 동시에, 진폭은 감소된다. 그러므로, 링크 부재 두께 변화는, 접촉 부분의 진폭과 힘 사이의 관계를 변경할 가능성이 있을 수도 있다. 진동체 우세 모드들의 공진 주파수들은 링크 부재를 보다 얇게 할 때 일반적으로 감소된다. 이러한 효과는 링크 우세 모드에 대해 훨씬 현저하다. 그러므로, 링크 부재를 보다 얇게 함으로써, 링크 우세 모드들을 위한 공진 주파수들이 진동체 우세 모드들의 공진 주파수들에 보다 가깝게 될 수도 있는 것을 인지해야 한다.
많은 응용들을 위해, 진동체들의 굽힘 방향으로 평균 두께보다 큰 링크 부재의 굽힘 방향으로 평균 두께를 가지는 것이 유리하다는 것이 밝혀졌다. 도 6e는 링크 부재의 평균 두께가 진동체들의 두께보다 큰 또 하나의 실시예를 도시한 것이다.
또한, 링크 부재와 진동체들의 길이는 많은 응용들에 관여한다. 대부분의 경우에, 보다 짧은 링크 부재는, 보다 큰 이용 가능한 힘을, 특히 굽힘 방향으로 제공할 것이지만, 연결 방향으로의 힘은 증가를 보여준다. 보다 긴 링크 부재는 일반적으로 굽힘 방향으로 보다 큰 진폭을 제공하지만, 연결 방향으로는 보다 짧은 진폭을 제공할 것이다. 그러므로, 링크 부재 길이는, X방향으로의 스트로크와 Z방향으로의 스트로크간의 비율을 효율적으로 변경시키기 위해 이용되어도 된다. 보다 긴 링크 부재는 링크 우세 공진 모드들의 공진 주파수들을 낮춘다. 그러나, 진동체 우세 모드들의 공진 주파수에 대한 영향은 상대적으로 낮다.
대부분의 응용들에서, 힘은 일반적으로 가장 중요한 파라미터이고, 이러한 응용들에서는 짧은 링크들이 선호된다.
그러나, 그 길이는 굽힘 강성에도 연관되어 있다. 많은 응용들을 위해, 진동체들과 링크 부재의 길이들의 비율이 각각의 굽힘 강성들에 연관될 수도 있다는 것이 밝혀졌다. 따라서, 일 실시예에서, 연결 방향으로 각각 2개의 진동체의 각각의 길이는 연결 방향으로의 링크 부재의 길이보다 적어도 50% 더 길다. 추가의 실시예에서, 연결 방향으로의 2개의 진동체의 각각의 길이는, 연결 방향으로의 링크 부재의 길이보다 두 배 크다.
지금까지 설명된 실시예들에서, 진동체들은, 주 표면이 굽힘 진동들의 스트로크들에 대해 가로지르는 대강 평평한 형상들을 가진다.
그러나, 다른 실시예들에서는, 또한 진동체들의 다른 타입들, 예컨대, 두께가 가변되는 진동체들을 사용하여도 된다.
위에서 설명된 실시예들에서, 접촉 부분은 링크 부재의 구동 패드에 설치된다. 구동 패드는 각각의 기계적 링크 연결들 사이의 연결선을 가로지르게 연장되어 있다. 도 6a-6e에서 특별한 것을 알 수 있다.
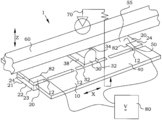
도 7은 초음파 전기기계 모터 1의 실시예를 개략적으로 도시한 것이다. 초음파 전기기계 모터 1은, 여기서 상술한 것에 따른 초음파 전기기계 고정자 10을 구비한다.
특별한 일 실시예에서, 초음파 전기기계 고정자 10은, 2개의 진동체들 20과, 연결 방향 X를 따라 2개의 진동체 20을 연결하는 링크 부재 30과, 고정자 지지체 40를 구비한다. 각 진동체 20은 각각의 전기기계 소자 23을 구비한다. 각 진동체 20은 교류 전압이 각각의 전기기계 소자 23에 인가될 때, 연결 방향 X를 가로지르는 굽힘 방향 Z로 굽힘 진동들을 행하도록 구성된다. 링크 부재 30은, 이동되는 몸체 60의 표면에 접촉하도록 구성된 접촉 부분 34를 가진다. 링크 부재 30은, 연결 방향 X로 각각의 진동체 20에 대해 기계적 링크 연결 부분들 32를 가진다. 기계적 링크 연결 부분들 32는, 초음파 전기기계 고정자의 임의의 다른 부분에 대한 유일한 기계적 어태치먼트이고, 그 접촉 부분은 이동되는 몸체 60과의 접촉부일 뿐이다. 2개의 진동체 20과 상기 링크 부재 30은 함께 진동 조립체 50을 구성한다. 각 진동체 20은, 연결 방향 X와 굽힘 방향 Z의 양쪽을 가로지르는 방향으로, 각각의 적어도 일측에 있는 어태치먼트 탭들 12에 의해 고정자 지지체 40에 기계적으로 부착되어 있다. 각 진동체 20은 각 진동체 20의 상기 적어도 일측에 적어도 2개의 어태치먼트 탭들에 의해 고정자 지지체 40에 기계적으로 부착된다. 어태치먼트 탭들 12는, 적어도, 연결 방향 X와 굽힘 방향 Z의 양쪽을 가로지르는 방향으로 설치되어서, 연결 방향 X와 굽힘 방향 Z의 양쪽을 가로지르는 방향으로 진동체들 20의 기계적 병진운동이 반작용된다. 달리 말하면, 실제의 연결을 생성하는 방향은, 굽힘 방향 Z에 비평행할뿐만 아니라 연결 방향 X에도 비평행하다. 어태치먼트 탭들 12와 링크 부재 30의 기계적 링크 연결 부분들 32는, 유선이라면, 초음파 전기기계 고정자 10 또는 초음파 전기기계 모터 1의 임의의 다른 부분에 진동체 20의 유일한 기계적 어태치먼트들이고, 및/또는 전기기계 소자들 23에 전압들을 공급하기 위한 다른 회로소자는, 위에서 한층 더 설명된 것처럼, 무시된다.
초음파 전기기계 모터 1은, 링크 부재 30의 접촉 부분 34에 대해 접촉면을 갖게 배열된, 이동되는 몸체 60을 더 구비한다. 본 도면에는, 이동되는 몸체 60이 빔으로서 도시되어 있다. 그러나, 당업자는, 이동되는 몸체 60이 접촉 부분 34에 의해 접촉 가능한 상호작용 표면을 갖는 임의의 타입의 고체 구조일 수 있다.
작동 힘을 제공하기 위해서, 초음파 전기기계 고정자 10은 수직항력에 의해 이동되는 몸체 60에 대해 눌려져야 한다. 이 때문에, 이것은, 당업자에 의해 잘 알려져 있으므로, 본 개시내용에서는 수직항력에 대해 한층 더 논의하지는 않는다. 이동되는 몸체 60과 초음파 전기기계 고정자 10 사이의 상기와 같은 수직항력을 제공하기 위한 수단 70은, 본 도면에 개략적으로 도시되어 있다.
위에서 언급한 바와 같이, 초음파 전기기계 모터 1의 작동은 전기기계 소자들에 교류 전압들을 인가함으로써 수행된다. 그러므로, 2개의 진동체 20에 전압을 독립적이고 제어 가능하게 제공하도록 구성된 전원장치(80)는, 그 도면에 개략적으로 도시되어 있다. 전압을 인가하는 방식들은, 전기기계 소자들의 실제 설계에 의존하고, 이 때문에, 임의의 당업자에 의해 잘 알려져 있다.
위상 천이 전압이 전기기계 소자들, 즉, 압전소자들에 인가될 때, 진동체들은 인가된 전압들의 주파수, 바람직하게는 그들의 기계적 공진 주파수들에 가까운 주파수로 진동하기 시작할 것이다. 이것은, 구동 패드 38을 가지는 링크 부재 30에서도 진동을 야기할 것이다. 구동 패드 38의 위에 접촉 부분 34가 타원 궤적으로 움직이기 시작할 것이다.
상기 도시된 실시예에서, 각 진동체 20은 압전기 볼륨 22와 금속판 55의 조립체를 구비한다. 압전기 볼륨 22는 적어도 2개의 공간적으로 분리된 위치들에서 금속판 55에 부착된다. 이것에 의해 결국 압전기 볼륨 22의 크기 변화는 압전기 볼륨 22와 금속판 55의 조립체의 굽힘을 야기한다. 바람직하게는, 압전기 볼륨 22는 전체 공통 표면들을 따라 금속판 55에 부착된다.
일 실시예에서, 연속적인 금속판 55는 적어도 2개의 진동체 30의 일부와 적어도 링크 부재 30의 일부를 구성한다.
초음파 전기기계 고정자 10은 도 7의 실시예에서, 탄성 진동 볼륨 24뿐만 아니라 캐리어인 금속판 55를 기초로 한다. 이 금속판 55는 금속 부분 55를 가진 진동체를 함께 작성하는 적어도 2개의 압전기(전기기계) 소자들 22에 연결된다.
위에서 언급한 바와 같이, 전기기계 부분은 압전기 재료로 만들어질 수 있다. 정적 휨이 보다 높은 보다 연질의 압전기 재료는 넓은 주파수 작동 모터를 얻는데 사용된다. 정적 휨이 보다 낮지만 Q-값이 보다 높은 경질의 압전기 재료는, 바람직하게는 보다 높은 효율, 보다 적은 열을 얻는데 사용되지만 보다 구동 주파수에 의존되어진다.
금속 부분은, 바람직하게는, 예상된 상기 기계의 하중으로 인해 플라스틱 변형이 일어나지 않거나 임계 영역들에서 재료의 피로에 이르지 않을 금속으로 만드는 것이 필요할 것이다.
그 밖의 실시예들에서는, 다른 강력하지만 금속보다 탄성적인 재료를 진동체들의 탄성 볼륨으로서 사용하는 것이 가능하다.
이동 물체뿐만 아니라 구동 패드도, 내마모성이 있는 경질의 재료로 만들어지는 것이 바람직하다.
당업자는 설계 가능성들이 크다는 것을 안다. 일 실시예에서, 상기 모터는 이동되는 공통 몸체의 반대쪽에 적어도 2개의 초음파 전기기계 고정자들로 만들어질 수 있다.
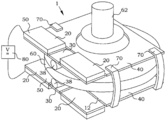
일 실시예에서, 상기 모터는 회전형 모터이어도 된다. 이것은, 액추에이터 부품들을 바(bar) 대신 디스크와 마찰 접촉시킴으로써 달성될 수 있다.
위에서 설명된 기술로 회전형 모터를 만드는 일 실시예는, 도 8에 도시되어 있다. 여기서, 2개의 진동 조립체 50은, 이동되는 몸체 60의 각 측에, 여기서는 디스크의 형상으로 설치된다. 여기서, 수직항력을 제공하기 위한 수단 70은, 2개의 고정자 지지체 40 사이에서 작동할 수 있다. 2개의 진동 조립체 50의 조정된 동작은 축 62 주위의 디스크의 회전을 야기할 것이다.
위에서 설명된 실시예들은 본 발명의 몇 가지 예들로서 이해되어야 한다. 본 발명의 범위로부터 이탈하지 않고 상기 실시예들을 다양하게 변형, 조합 그리고 변경시킬 수도 있는 것을 당업자들은 알 것이다. 특히, 상이한 실시예들에서 상이한 일부 해결책들은 기술적으로 가능한 경우 그 밖의 구성들에서 조합될 수 있다. 하지만, 본 발명의 범위는, 첨부된 청구항들에 의해 정의된다.
Claims (22)
- 초음파 전기기계 고정자(10)로서,
2개의 진동체(20);
연결 방향(X)을 따라 상기 2개의 진동체(20)를 연결하는 링크 부재(30); 및
고정자 지지체(40)를 구비하고,
상기 각 진동체(20)는 각각의 전기기계 소자(23)를 구비하고;
상기 각 진동체(20)는, 교류 전압이 각각의 전기기계 소자(23)에 인가될 때, 상기 연결 방향(X)을 가로지르는 굽힘 방향(Z)으로 굽힘 진동들을 행하도록 구성되고;
상기 링크 부재(30)는, 이동되는 몸체(60)의 표면에 접촉하도록 구성된 접촉 부분(34)을 갖고;
상기 링크 부재(30)는, 상기 연결 방향(X)으로 각각의 상기 진동체들(20)에 대해 기계적 링크 연결 부분들(32)을 갖고;
상기 기계적 링크 연결 부분들(32)은, 상기 초음파 전기기계 고정자(10)의 임의의 다른 부분에 대한 상기 링크 부재(30)의 유일한 기계적 어태치먼트(attachment)임에 따라서,
상기 2개의 진동체(20)와 상기 링크 부재(30)는 함께 진동 조립체(50)를 구성하고;
상기 각 진동체(20)는, 상기 연결 방향(X)과 상기 굽힘 방향(Z) 양쪽을 가로지르는 방향으로, 상기 각각의 진동체들(20)의 적어도 하나의 측면에 있는 어태치먼트 탭들(12)에 의해 상기 고정자 지지체(40)에 기계적으로 부착되어 있고;
상기 어태치먼트 탭들(12)이 상기 연결 방향(X)과 상기 굽힘 방향(Z) 양쪽을 가로지르는 방향들로 설치되어서, 상기 연결 방향(X)과 상기 굽힘 방향(Z) 양쪽을 가로지르는 상기 방향들로 상기 진동체들(20)의 기계적 병진운동이 반작용되고,
상기 각 진동체(20)는 상기 각각의 진동체들(20)의 상기 적어도 하나의 측면에 있는 적어도 2개의 상기 어태치먼트 탭들(12)에 의해 상기 고정자 지지체(40)에 기계적으로 부착되는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 1 항에 있어서,
상기 각 진동체(20)는, 상기 연결 방향(X)과 상기 굽힘 방향(Z) 양쪽을 가로지르는 방향으로, 상기 각각의 진동체들(20)의 반대측들의 각각에 있는 적어도 2개의 상기 어태치먼트 탭들(12)에 의해 상기 고정자 지지체(40)에 기계적으로 부착되는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 1 항 또는 제 2 항에 있어서,
상기 진동 조립체(50)는 진동 공진 모드들을 갖고;
상기 진동 공진 모드들 중 진동체 우세 대칭 진동 공진 모드는, 진동체 우세 대칭 진동 공진 주파수에서 상기 링크 부재(30) 주위에 대칭인 상기 2개의 진동체(20)의 굽힘 진동들을 나타내고;
상기 진동 공진 모드들 중 진동체 우세 비대칭 진동 공진 모드는, 진동체 우세 비대칭 진동 공진 주파수에서 상기 링크 부재(30) 주위에 비대칭인 상기 2개의 진동체(20)의 굽힘 진동들을 나타내고;
상기 어태치먼트 탭들(12)은 상기 진동체 우세 대칭 진동 공진 모드와 상기 진동체 우세 비대칭 진동 공진 모드의 적어도 하나의 교점들에 위치결정되어 있는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 각 진동체(20)에 대해서, 어태치먼트 탭(12)과 상기 연결 부분들(32)의 가장 가까운 연결 부분과의 사이의 거리는, 상기 진동체(20)의 상기 연결 방향(X)으로의 길이의 7-20%의 범위에 있는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 각 진동체(20)가 상기 굽힘 방향(Z)에 수직한 평면에서 테이퍼 형상을 가짐에 따라서, 상기 진동체들(20)의 각각의 좁은 단부는 상기 링크 부재(30)에 연결되어 있고 상기 진동체들(20)의 각각의 넓은 단부는 자유 단부인 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 각 진동체(20)가 상기 굽힘 방향(Z)에 수직한 평면에서 테이퍼 형상을 가짐에 따라서, 상기 진동체들(20)의 각각의 넓은 단부는 상기 링크 부재(30)에 연결되어 있고 상기 진동체들(20)의 각각의 좁은 단부는 자유 단부인 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 1 항 내지 제 6 항 중 어느 한 항에 있어서,
상기 진동 조립체(50)는 진동 공진 모드들을 갖고;
상기 진동 공진 모드들 중 진동체 우세 대칭 진동 공진 모드는, 진동체 우세 대칭 진동 공진 주파수에서 상기 링크 부재(30) 주위에 대칭인 상기 2개의 진동체(20)의 굽힘 진동들을 나타내고;
상기 진동 공진 모드들 중 진동체 우세 비대칭 진동 공진 모드는, 진동체 우세 비대칭 진동 공진 주파수에서 상기 링크 부재(30) 주위에 비대칭인 상기 2개의 진동체(20)의 굽힘 진동들을 나타내고;
상기 진동체 우세 대칭 진동 공진 주파수는 상기 진동체 우세 비대칭 진동 공진 주파수와 10% 미만만큼 다른 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 7 항에 있어서,
상기 진동체 우세 대칭 진동 공진 주파수는 상기 진동체 우세 비대칭 진동 공진 주파수와 0.2% 이상만큼 다른 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 7 항 또는 제 8 항에 있어서,
상기 진동 공진 모드들 중 링크 우세 대칭 진동 공진 모드는, 상기 링크 부재(30) 주위에 같은 방향들로의 스트로크들과, 링크 우세 대칭 진동 공진 주파수에서 상기 굽힘 방향으로 상기 링크 부재(30)의 상기 접촉 부분(34)의 주된 변위를, 갖는 상기 2개의 진동체(20)의 굽힘 진동들을 나타내고;
상기 진동 공진 모드들 중 링크 우세 비대칭 진동 공진 모드는, 상기 링크 부재(30) 주위에 반대 방향들로의 스트로크들과, 진동체 우세 비대칭 진동 공진 주파수에서 상기 연결 방향으로 상기 링크 부재(30)의 상기 접촉 부분(34)의 주된 변위를, 갖는 상기 2개의 진동체(20)의 굽힘 진동들을 나타내고;
상기 링크 우세 대칭 진동 공진 주파수와 상기 링크 우세 비대칭 진동 공진 주파수 양쪽은, 상기 진동체 우세 비대칭 진동 공진 주파수와 상기 진동체 우세 대칭 진동 공진 주파수 양쪽을 5% 이상만큼, 바람직하게는 20% 이상만큼 초과하는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 1 항 내지 제 9 항 중 어느 한 항에 있어서,
상기 진동체들(20)은, 주된 표면이 상기 굽힘 진동들의 스트로크들을 가로지르는 대강 평평한 형상을 갖는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 1 항 내지 제 10 항 중 어느 한 항에 있어서,
상기 접촉 부분(34)은, 상기 링크 부재(30)의 구동 패드(38)에 설치되고;
상기 구동 패드(38)는, 각각의 상기 기계적 링크 연결 부분들(32) 사이의 연결선을 가로질러 연장되는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 11 항에 있어서,
상기 링크 연결 부분들(32) 중 적어도 하나는, 상기 굽힘 진동들의 방향으로, 상기 링크 연결 부분들(32)을 제외한 상기 링크 부재(30)의 굽힘 강성의 50% 미만인, 상기 굽힘 진동들의 방향으로의 굽힘 강성을 갖는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 11 항 또는 제 12 항에 있어서,
상기 링크 연결 부분들(32) 중 적어도 하나는, 상기 굽힘 진동들의 방향으로, 상기 링크 연결 부분들(32)을 제외한 상기 링크 부재(30)의 굽힘 강성의 5%보다 높은, 상기 굽힘 진동들의 방향으로의 굽힘 강성을 갖는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 11 항 내지 제 13 항 중 어느 한 항에 있어서,
상기 링크 연결 부분들(32) 중 적어도 하나는, 상기 굽힘 진동들의 상기 방향으로, 상기 링크 부재(30)의 상기 주된 부분들과 상기 진동체들(20)보다 얇은 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 11 항 내지 제 13 항 중 어느 한 항에 있어서,
상기 링크 연결 부분들(32) 중 적어도 하나는, 상기 굽힘 진동들에 수직한 방향으로, 상기 링크 부재(30)의 상기 주된 부분들과 상기 진동체들(20)보다 좁은 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 11 항 내지 제 13 항 중 어느 한 항에 있어서,
상기 링크 연결 부분들(32) 중 적어도 하나에는, 상기 굽힘 진동들에 수직한 방향으로, 상기 링크 부재(30)의 상기 주된 부분들과 상기 진동체들(20)보다 좁은, 효율적인 폭을 만드는 구멍들이 구비되어 있는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 11 항 내지 제 13 항 중 어느 한 항에 있어서,
상기 링크 연결 부분들(32) 중 적어도 하나는, 상기 링크 부재(30)의 상기 주된 부분들과 상기 진동체들(20)의 재료들보다 덜 단단한 재료로 이루어지는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 1 항 내지 제 17 항 중 어느 한 항에 있어서,
상기 각 진동체(20)는, 압전기 볼륨(22)과 금속판(55)의 조립체를 구성하고,
상기 압전기 볼륨(22)이 적어도 2개의 공간적으로 분리된 위치들에서 상기 금속판(55)에 부착됨에 따라서, 상기 압전기 볼륨(22)의 크기 변화는 상기 압전기 볼륨(22)과 상기 금속판(55)의 조립체의 굽힘을 야기하는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 18 항에 있어서,
연속적인 금속판은 상기 2개의 진동체(20)의 적어도 일부와 상기 링크 부재(30)의 적어도 일부를 구성하는 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 1 항 내지 제 19 항 중 어느 한 항에 있어서,
상기 링크 부재(30)의 상기 굽힘 방향(Z)으로의 평균 두께는, 상기 진동체들(20)의 상기 굽힘 방향(Z)으로의 평균 두께보다 큰 것을 특징으로 하는, 초음파 전기기계 고정자. - 제 1 항 내지 제 20 항 중 어느 한 항에 있어서,
상기 연결 반향(X)으로의 상기 2개의 진동체(20)의 각각의 길이는, 상기 연결 방향(X)으로의 상기 링크 부재(30)의 길이보다 적어도 50% 긴 것을 특징으로 하는, 초음파 전기기계 고정자. - 청구항 1 내지 21 중 어느 한 항에 따른 초음파 전기기계 고정자(10);
상기 링크 부재(30)의 상기 접촉 부분(34)에 대해 접촉면이 배열된 이동되는 몸체(60);
상기 이동되는 몸체(60)와 상기 초음파 전기기계 고정자(10) 사이에 수직항력을 제공하는 수단(70); 및
상기 2개의 진동체들(20)에 전압들을 독립적으로 제어 가능하게 제공하도록 구성된 전원장치(80)를 구비하는 것을 특징으로 하는, 초음파 전기기계 모터(1).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE1750994 | 2017-08-16 | ||
| SE1750994-4 | 2017-08-16 | ||
| PCT/SE2018/050826 WO2019035757A1 (en) | 2017-08-16 | 2018-08-15 | ULTRASONIC RESONANT MOTOR |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200037318A true KR20200037318A (ko) | 2020-04-08 |
Family
ID=65362770
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207005831A KR20200037318A (ko) | 2017-08-16 | 2018-08-15 | 초음파 공진 모터 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11223298B2 (ko) |
| EP (1) | EP3669450A4 (ko) |
| JP (1) | JP2020532255A (ko) |
| KR (1) | KR20200037318A (ko) |
| CN (1) | CN111373649A (ko) |
| BR (1) | BR112020003324A2 (ko) |
| WO (1) | WO2019035757A1 (ko) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113544966A (zh) * | 2019-02-22 | 2021-10-22 | 高压马达乌普萨拉有限公司 | 机电马达和包括机电马达的可调谐滤波器 |
| EP4078798A4 (en) | 2019-12-16 | 2024-04-24 | Acuvi AB | ELECTROMECHANICAL ACTUATORS WITH COMPOSITE DRIVE PADS |
| CN113708660B (zh) * | 2021-08-30 | 2022-07-26 | 合肥工业大学 | 一种高速谐振冲击式压电电机 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0618343U (ja) * | 1992-06-19 | 1994-03-08 | 株式会社田村電機製作所 | 用紙搬送装置 |
| JP3062672B2 (ja) * | 1993-09-21 | 2000-07-12 | セイコーインスツルメンツ株式会社 | 二次元走行メカニズム |
| CN1197548A (zh) * | 1995-08-25 | 1998-10-28 | 三井化学株式会社 | 压电振子部件、压电振子支撑结构和压电振子安装方法 |
| US6249073B1 (en) * | 1999-01-14 | 2001-06-19 | The Regents Of The University Of Michigan | Device including a micromechanical resonator having an operating frequency and method of extending same |
| JP2001111128A (ja) * | 1999-10-08 | 2001-04-20 | Seiko Instruments Inc | 圧電アクチュエータ |
| DE10154526B4 (de) * | 2001-06-12 | 2007-02-08 | Physik Instrumente (Pi) Gmbh & Co | Piezoelektrisches Stellelement |
| US6747394B2 (en) * | 2002-06-19 | 2004-06-08 | Piezomotor Uppsala Ab | Near-resonance electromechanical motor |
| JP3767540B2 (ja) * | 2002-10-28 | 2006-04-19 | 株式会社村田製作所 | 振動ジャイロ及び角速度センサー |
| US7157830B2 (en) * | 2003-04-02 | 2007-01-02 | Piezomotor Uppsala Ab | Near-resonance wide-range operating electromechanical motor |
| US6882084B2 (en) * | 2003-06-13 | 2005-04-19 | Piezomotor Uppsala Ab | Electromagnetic drive unit |
| TWI260104B (en) * | 2003-07-25 | 2006-08-11 | Sony Corp | MEMS type resonator, method for manufacturing the same, and communication device |
| US6967430B2 (en) * | 2003-10-01 | 2005-11-22 | Piezomotor Uppsala Ab | Flat resonating electromechanical drive unit |
| JP4064365B2 (ja) * | 2004-03-22 | 2008-03-19 | シャープ株式会社 | アクチュエータ、およびアクチュエータを備えた制御機器 |
| JP4583190B2 (ja) * | 2005-01-28 | 2010-11-17 | 富士通株式会社 | 共振器、超音波接合ヘッド及び超音波接合装置 |
| JP2007221865A (ja) * | 2006-02-14 | 2007-08-30 | Seiko Epson Corp | 圧電振動体、圧電振動体の固有振動数調整方法、圧電アクチュエータ、および電子機器 |
| KR100817470B1 (ko) * | 2006-10-24 | 2008-03-31 | 한국과학기술연구원 | 압전 선형 모터 |
| DE102007021337A1 (de) | 2007-05-07 | 2008-11-13 | Robert Bosch Gmbh | Piezoelektrische Antriebsvorrichtung |
| DE102008058484A1 (de) * | 2008-02-28 | 2009-09-10 | Physik Instrumente (Pi) Gmbh & Co. Kg | Hochpräziser Ultraschallmotor |
| US7969065B2 (en) * | 2008-09-09 | 2011-06-28 | Canon Kabushiki Kaisha | Vibration wave driving device |
| JP5959915B2 (ja) * | 2012-04-19 | 2016-08-02 | キヤノン株式会社 | 振動子の製造方法 |
| CN203039613U (zh) | 2012-11-02 | 2013-07-03 | 南京航空航天大学 | 一种小型一体式并联旋转超声电机 |
| JP6422248B2 (ja) * | 2013-07-10 | 2018-11-14 | キヤノン株式会社 | 駆動装置及びそれを有するレンズ駆動装置 |
| JP6268999B2 (ja) * | 2013-12-06 | 2018-01-31 | セイコーエプソン株式会社 | 圧電モーター、ロボットハンド、ロボット、指アシスト装置、電子部品搬送装置、電子部品検査装置、送液ポンプ、印刷装置、電子時計、投影装置 |
-
2018
- 2018-08-15 KR KR1020207005831A patent/KR20200037318A/ko active IP Right Grant
- 2018-08-15 BR BR112020003324-3A patent/BR112020003324A2/pt not_active Application Discontinuation
- 2018-08-15 JP JP2020508352A patent/JP2020532255A/ja active Pending
- 2018-08-15 US US16/639,283 patent/US11223298B2/en active Active
- 2018-08-15 EP EP18845504.2A patent/EP3669450A4/en active Pending
- 2018-08-15 WO PCT/SE2018/050826 patent/WO2019035757A1/en unknown
- 2018-08-15 CN CN201880067534.2A patent/CN111373649A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020532255A (ja) | 2020-11-05 |
| BR112020003324A2 (pt) | 2020-08-25 |
| WO2019035757A1 (en) | 2019-02-21 |
| CN111373649A (zh) | 2020-07-03 |
| US20200266729A1 (en) | 2020-08-20 |
| US11223298B2 (en) | 2022-01-11 |
| EP3669450A4 (en) | 2021-04-21 |
| EP3669450A1 (en) | 2020-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101100484B1 (ko) | 플랫 공명 전기-기계적 구동 장치 | |
| KR20200037318A (ko) | 초음파 공진 모터 | |
| JP2632811B2 (ja) | 振動駆動モータ | |
| EP0674350B1 (en) | Ultrasonic motor | |
| EP2080263B1 (en) | Vibration-type actuator | |
| JP4290168B2 (ja) | 振動波駆動装置 | |
| JP2007516688A (ja) | 小型圧電/電歪超音波リニアモータ | |
| CN101350575B (zh) | 致动器 | |
| JP2014511664A (ja) | 機械的エネルギを電気的エネルギに変換する装置 | |
| CN102195517A (zh) | 振动波驱动装置及其振动体的制造方法 | |
| JP4452275B2 (ja) | 圧電電気機械式駆動装置 | |
| JPH09182468A (ja) | 振動アクチュエータ | |
| WO2013023689A1 (en) | Noiseless electromechanical motor | |
| CN102725951A (zh) | 超声波电动机用振子 | |
| JP2001298968A (ja) | 振動モータ | |
| JP4901598B2 (ja) | 振動型アクチュエータ | |
| JPH09215349A (ja) | 振動アクチュエータ及びその調整方法 | |
| JP2004304963A (ja) | 圧電アクチュエータ | |
| JP2023505584A (ja) | 駆動ユニットを動作させる方法および駆動ユニット | |
| JPH0965668A (ja) | 振動アクチュエータ及びその調整方法 | |
| JPH0998590A (ja) | 振動アクチュエータ | |
| JP4032161B2 (ja) | アクチュエータ | |
| TW526634B (en) | Vibratory apparatus for moving a driven element and method of placing a piezoelectric element in compression in a resonator | |
| JP3892183B2 (ja) | 圧電アクチュエータ | |
| KR20110093033A (ko) | 진동 발전장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right |