KR20190104184A - 검출 장치 - Google Patents
검출 장치 Download PDFInfo
- Publication number
- KR20190104184A KR20190104184A KR1020197022529A KR20197022529A KR20190104184A KR 20190104184 A KR20190104184 A KR 20190104184A KR 1020197022529 A KR1020197022529 A KR 1020197022529A KR 20197022529 A KR20197022529 A KR 20197022529A KR 20190104184 A KR20190104184 A KR 20190104184A
- Authority
- KR
- South Korea
- Prior art keywords
- similarity
- data
- phase
- calculated
- calculating
- Prior art date
Links
Images



















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/952—Inspecting the exterior surface of cylindrical bodies or wires
-
- D—TEXTILES; PAPER
- D01—NATURAL OR MAN-MADE THREADS OR FIBRES; SPINNING
- D01H—SPINNING OR TWISTING
- D01H13/00—Other common constructional features, details or accessories
- D01H13/32—Counting, measuring, recording or registering devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/02—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/89—Investigating the presence of flaws or contamination in moving material, e.g. running paper or textiles
- G01N21/892—Investigating the presence of flaws or contamination in moving material, e.g. running paper or textiles characterised by the flaw, defect or object feature examined
-
- D—TEXTILES; PAPER
- D07—ROPES; CABLES OTHER THAN ELECTRIC
- D07B—ROPES OR CABLES IN GENERAL
- D07B1/00—Constructional features of ropes or cables
- D07B1/14—Ropes or cables with incorporated auxiliary elements, e.g. for marking, extending throughout the length of the rope or cable
- D07B1/145—Ropes or cables with incorporated auxiliary elements, e.g. for marking, extending throughout the length of the rope or cable comprising elements for indicating or detecting the rope or cable status
-
- D—TEXTILES; PAPER
- D07—ROPES; CABLES OTHER THAN ELECTRIC
- D07B—ROPES OR CABLES IN GENERAL
- D07B2301/00—Controls
- D07B2301/55—Sensors
- D07B2301/5531—Sensors using electric means or elements
- D07B2301/5572—Sensors using electric means or elements optical
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- General Health & Medical Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Mechanical Engineering (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Spinning Or Twisting Of Yarns (AREA)
Abstract
위상 산출부(12)는, 유사도 산출부(11)에 의해 산출된 제 1 유사도 및 제 2 유사도를 요소로 하는 제 1 유사도 벡터의 편각을 제 1 위상으로서 산출한다. 위상 산출부(12)는, 유사도 산출부(11)에 의해 산출된 제 3 유사도 및 제 4 유사도를 요소로 하는 제 2 유사도 벡터의 편각을 제 2 위상으로서 산출한다. 주기 산출부(13)는, 위상 산출부(12)에 의해 산출된 제 1 위상 및 제 2 위상에 근거하여, 긴 물체에 형성된 모양의 주기를 산출한다. 이상 검출부(14)는, 주기 산출부(13)에 의해 산출된 주기에 근거하여, 긴 물체의 이상을 검출한다.
Description
본 발명은, 긴 물체를 검출 대상으로 하는 검출 장치에 관한 것이다.
특허문헌 1에, 로프를 검사하는 장치가 기재되어 있다. 특허문헌 1에 기재된 장치는, 광원과 수광 소자를 구비한다. 광원과 수광 소자의 사이에 로프가 배치된다. 특허문헌 1에 기재된 장치에서는, 수광 소자가 받은 광량에 근거하여 로프의 직경이 산출된다. 산출한 직경의 피크 값의 간격을 스트랜드(strand)의 간격에 일치시키는 것에 의해, 로프의 위치를 산출한다.
특허문헌 1에 기재된 장치에서는, 로프의 이동 속도가 변동하고 있으면, 로프의 이동 속도가 변동하고 있는 것인지 로프의 스트랜드 피치가 변동하고 있는 것인지를 구별할 수 없다. 즉, 특허문헌 1에 기재된 장치에서 채용되어 있는 검출 방법에서는, 로프의 이동 속도가 변동하고 있으면, 로프에 발생한 이상, 예컨대 피치 이상을 검출할 수 없었다.
본 발명은, 상술한 바와 같은 과제를 해결하기 위해 이루어졌다. 본 발명의 목적은, 긴 물체의 이동 속도가 변동하고 있는 경우에도, 긴 물체의 이상을 검출할 수 있는 검출 장치를 제공하는 것이다.
본 발명과 관련되는 검출 장치는, 표면에 주기적인 모양을 갖는 긴 물체의 제 1 표면 데이터 및 제 2 표면 데이터를 취득하는 데이터 취득 수단과, 제 1 레퍼런스 데이터 및 제 2 레퍼런스 데이터를 기억하는 기억 수단과, 데이터 취득 수단에 의해 취득된 제 1 표면 데이터와 제 1 레퍼런스 데이터의 제 1 유사도, 데이터 취득 수단에 의해 취득된 제 1 표면 데이터와 제 2 레퍼런스 데이터의 제 2 유사도, 데이터 취득 수단에 의해 취득된 제 2 표면 데이터와 제 1 레퍼런스 데이터의 제 3 유사도, 및 데이터 취득 수단에 의해 취득된 제 2 표면 데이터와 제 2 레퍼런스 데이터의 제 4 유사도를 산출하는 유사도 산출 수단과, 유사도 산출 수단에 의해 산출된 제 1 유사도 및 제 2 유사도를 요소로 하는 제 1 유사도 벡터의 편각을 제 1 위상으로서 산출하고, 유사도 산출 수단에 의해 산출된 제 3 유사도 및 제 4 유사도를 요소로 하는 제 2 유사도 벡터의 편각을 제 2 위상으로서 산출하는 위상 산출 수단과, 위상 산출 수단에 의해 산출된 제 1 위상 및 제 2 위상에 근거하여, 긴 물체에 형성된 모양의 주기를 산출하는 주기 산출 수단과, 주기 산출 수단에 의해 산출된 주기에 근거하여, 긴 물체의 이상을 검출하는 제 1 이상 검출 수단을 구비한다.
본 발명과 관련되는 검출 장치는, 표면에 주기적인 모양을 갖는 긴 물체의 복수의 표면 데이터를 취득하는 데이터 취득 수단과, 제 1 레퍼런스 데이터 및 제 2 레퍼런스 데이터를 기억하는 기억 수단과, 데이터 취득 수단에 의해 취득된 표면 데이터 중에서 제 1 표면 데이터 및 제 2 표면 데이터를 선택하는 선택 수단과, 선택 수단에 의해 선택된 제 1 표면 데이터와 제 1 레퍼런스 데이터의 제 1 유사도, 선택 수단에 의해 선택된 제 1 표면 데이터와 제 2 레퍼런스 데이터의 제 2 유사도, 선택 수단에 의해 선택된 제 2 표면 데이터와 제 1 레퍼런스 데이터의 제 3 유사도, 및 선택 수단에 의해 선택된 제 2 표면 데이터와 제 2 레퍼런스 데이터의 제 4 유사도를 산출하는 유사도 산출 수단과, 유사도 산출 수단에 의해 산출된 제 1 유사도 및 제 2 유사도를 요소로 하는 제 1 유사도 벡터의 편각을 제 1 위상으로서 산출하고, 유사도 산출 수단에 의해 산출된 제 3 유사도 및 제 4 유사도를 요소로 하는 제 2 유사도 벡터의 편각을 제 2 위상으로서 산출하는 위상 산출 수단과, 위상 산출 수단에 의해 산출된 제 1 위상 및 제 2 위상에 근거하여, 긴 물체에 형성된 모양의 주기를 산출하는 주기 산출 수단과, 주기 산출 수단에 의해 산출된 주기에 근거하여, 긴 물체의 이상을 검출하는 제 1 이상 검출 수단을 구비한다.
본 발명과 관련되는 검출 장치는, 표면에 주기적인 모양을 갖는 제 1 긴 물체의 제 1 표면 데이터 및 제 1 긴 물체의 표면에 형성된 모양과 동일한 모양을 표면에 갖는 제 2 긴 물체의 제 2 표면 데이터를 취득하는 데이터 취득 수단과, 제 1 레퍼런스 데이터 및 제 2 레퍼런스 데이터를 기억하는 기억 수단과, 데이터 취득 수단에 의해 취득된 제 1 표면 데이터와 제 1 레퍼런스 데이터의 제 1 유사도, 데이터 취득 수단에 의해 취득된 제 1 표면 데이터와 제 2 레퍼런스 데이터의 제 2 유사도, 데이터 취득 수단에 의해 취득된 제 2 표면 데이터와 제 1 레퍼런스 데이터의 제 3 유사도, 및 데이터 취득 수단에 의해 취득된 제 2 표면 데이터와 제 2 레퍼런스 데이터의 제 4 유사도를 산출하는 유사도 산출 수단과, 유사도 산출 수단에 의해 산출된 제 1 유사도 및 제 2 유사도를 요소로 하는 제 1 유사도 벡터의 편각을 제 1 위상으로서 산출하고, 유사도 산출 수단에 의해 산출된 제 3 유사도 및 제 4 유사도를 요소로 하는 제 2 유사도 벡터의 편각을 제 2 위상으로서 산출하는 위상 산출 수단과, 위상 산출 수단에 의해 산출된 제 1 위상 및 제 2 위상에 근거하여, 제 1 긴 물체 또는 제 2 긴 물체에 이상이 발생한 것을 검출하는 제 1 이상 검출 수단을 구비한다.
본 발명과 관련되는 검출 장치는, 예컨대 유사도 산출 수단, 위상 산출 수단, 주기 산출 수단 및 제 1 이상 검출 수단을 구비한다. 위상 산출 수단은, 제 1 유사도 벡터의 편각을 제 1 위상으로서 산출하고, 제 2 유사도 벡터의 편각을 제 2 위상으로서 산출한다. 주기 산출 수단은, 위상 산출 수단에 의해 산출된 제 1 위상 및 제 2 위상에 근거하여, 긴 물체에 형성된 모양의 주기를 산출한다. 제 1 이상 검출 수단은, 주기 산출 수단에 의해 산출된 주기에 근거하여 긴 물체의 이상을 검출한다. 본 발명과 관련되는 검출 장치이면, 긴 물체의 이동 속도가 변동하고 있는 경우에도, 긴 물체의 이상을 검출할 수 있다.
도 1은 본 발명의 실시의 형태 1에 있어서의 검출 장치의 예를 나타내는 도면이다.
도 2는 도 1에 나타내는 화살표 A의 방향으로부터 긴 물체를 본 도면이다.
도 3은 수광 소자에 의해 취득된 수광 화상의 처리 방법을 나타내는 도면이다.
도 4는 제어 장치의 예를 나타내는 도면이다.
도 5는 데이터 처리부의 기능을 설명하기 위한 도면이다.
도 6은 레퍼런스 데이터의 예를 나타내는 도면이다.
도 7은 위상 산출부의 기능을 설명하기 위한 도면이다.
도 8은 본 발명의 실시의 형태 1에 있어서의 검출 장치의 동작의 예를 나타내는 플로차트이다.
도 9는 센서 헤드의 다른 예를 설명하기 위한 도면이다.
도 10은 수광 소자에 의해 취득된 수광 화상의 처리 방법을 나타내는 도면이다.
도 11은 센서 헤드의 다른 예를 설명하기 위한 도면이다.
도 12는 센서 헤드의 다른 예를 설명하기 위한 도면이다.
도 13은 카메라에 의해 촬영된 화상 데이터의 처리 방법을 나타내는 도면이다.
도 14는 본 발명의 실시의 형태 2에 있어서의 제어 장치의 예를 나타내는 도면이다.
도 15는 본 발명의 실시의 형태 2에 있어서의 검출 장치의 동작의 예를 나타내는 플로차트이다.
도 16은 선택부의 기능을 설명하기 위한 도면이다.
도 17은 본 발명의 실시의 형태 3에 있어서의 검출 장치의 예를 나타내는 도면이다.
도 18은 도 17에 나타내는 화살표 A의 방향으로부터 긴 물체를 본 도면이다.
도 19는 수광 소자에 의해 취득된 수광 화상의 처리 방법을 나타내는 도면이다.
도 20은 제어 장치의 예를 나타내는 도면이다.
도 21은 위상 산출부의 기능을 설명하기 위한 도면이다.
도 22는 제어 장치의 하드웨어 구성의 예를 나타내는 도면이다.
도 2는 도 1에 나타내는 화살표 A의 방향으로부터 긴 물체를 본 도면이다.
도 3은 수광 소자에 의해 취득된 수광 화상의 처리 방법을 나타내는 도면이다.
도 4는 제어 장치의 예를 나타내는 도면이다.
도 5는 데이터 처리부의 기능을 설명하기 위한 도면이다.
도 6은 레퍼런스 데이터의 예를 나타내는 도면이다.
도 7은 위상 산출부의 기능을 설명하기 위한 도면이다.
도 8은 본 발명의 실시의 형태 1에 있어서의 검출 장치의 동작의 예를 나타내는 플로차트이다.
도 9는 센서 헤드의 다른 예를 설명하기 위한 도면이다.
도 10은 수광 소자에 의해 취득된 수광 화상의 처리 방법을 나타내는 도면이다.
도 11은 센서 헤드의 다른 예를 설명하기 위한 도면이다.
도 12는 센서 헤드의 다른 예를 설명하기 위한 도면이다.
도 13은 카메라에 의해 촬영된 화상 데이터의 처리 방법을 나타내는 도면이다.
도 14는 본 발명의 실시의 형태 2에 있어서의 제어 장치의 예를 나타내는 도면이다.
도 15는 본 발명의 실시의 형태 2에 있어서의 검출 장치의 동작의 예를 나타내는 플로차트이다.
도 16은 선택부의 기능을 설명하기 위한 도면이다.
도 17은 본 발명의 실시의 형태 3에 있어서의 검출 장치의 예를 나타내는 도면이다.
도 18은 도 17에 나타내는 화살표 A의 방향으로부터 긴 물체를 본 도면이다.
도 19는 수광 소자에 의해 취득된 수광 화상의 처리 방법을 나타내는 도면이다.
도 20은 제어 장치의 예를 나타내는 도면이다.
도 21은 위상 산출부의 기능을 설명하기 위한 도면이다.
도 22는 제어 장치의 하드웨어 구성의 예를 나타내는 도면이다.
첨부한 도면을 참조하여, 본 발명을 설명한다. 중복되는 설명은, 적당히 간략화 혹은 생략한다. 각 도면에 있어서, 동일한 부호는 동일한 부분 또는 상당하는 부분을 나타낸다.
실시의 형태 1.
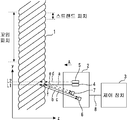
도 1은 본 발명의 실시의 형태 1에 있어서의 검출 장치의 예를 나타내는 도면이다. 검출 장치는, 긴 물체의 이상을 검출하기 위한 장치이다. 긴 물체에는, 예컨대 로프(1)가 포함된다. 도 2는 도 1에 나타내는 화살표 A의 방향으로부터 긴 물체를 본 도면이다.
설명을 용이하게 하기 위해, 도 1 및 도 2에 나타내는 바와 같이, x축, y축 및 z축을 설정한다. y축은, 긴 물체의 긴 방향을 향하는 축이다. x축은, y축 및 z축에 직교한다. z축은, y축 및 x축에 직교한다. x축, y축 및 z축은, 3차원 공간 상에서의 좌표를 나타내기 위해 설정된 축이다. 도 2는, +z 방향으로부터 긴 물체를 본 도면에 상당한다.
긴 물체는, 긴 방향으로 이동한다. 예컨대, 로프(1)는 +y 방향 혹은 -y 방향으로 이동한다. 이와 같이 이동하는 로프(1)의 예로서, 엘리베이터에서 사용되는 와이어 로프를 들 수 있다. 로프(1)는, +y 방향 및 -y 방향의 양쪽으로 이동하더라도 좋다. 또, 검출 장치가 검출 대상으로 하는 긴 물체는, 로프(1)로 한정되지 않는다.
로프(1)는, 복수의 스트랜드를 구비한다. 로프(1)는, 복수의 스트랜드가 꼬아 합쳐지는 것에 의해 형성된다. 이 때문에, 로프(1)는, 표면에 주기적인 모양을 갖는다. 본 검출 장치가 이상을 검출하는 대상은, 표면에 주기적인 모양을 갖는 긴 물체이다. "모양"에는, 예컨대 형상, 도형, 색 및 색의 농담이 포함된다. 도 1 및 도 2는 8개의 스트랜드가 꼬아 합쳐지는 것에 의해 로프(1)가 형성되는 예를 나타낸다. 로프(1)의 표면에는, 복수의 스트랜드가 꼬아 합쳐지는 것에 의해 형성되는 요철이 규칙적으로 늘어서 있다. 이상적인 로프(1)의 단면 형상은, 꼬임 피치를 스트랜드의 수로 나눈 거리마다 동일하게 된다. 상기 단면이란, 로프(1)의 긴 방향과 직교하는 방향의 단면이다. 꼬임 피치를 스트랜드의 수로 나눈 거리는, 스트랜드 피치, 즉 모양의 주기이다.
본 실시의 형태에 나타내는 예에서는, 검출 장치는, 긴 물체에 형성된 모양의 주기를 산출하고, 이상의 유무를 판정한다. 검출 장치는, 예컨대 센서 헤드(2)와 제어 장치(3)를 구비한다.
센서 헤드(2)는, 긴 물체의 표면 데이터를 취득하는 수단의 일례이다. "표면 데이터"는, 긴 물체의 표면의 모양에 관한 데이터이다. 본 실시의 형태에 나타내는 예에서는, 센서 헤드(2)는, 긴 물체의 2개소의 표면 데이터를 동시에 취득한다. 예컨대, 센서 헤드(2)는, 로프(1) 중 제 1 위치를 통과하는 부분의 표면에 형성된 요철을 나타내는 데이터를 제 1 표면 데이터로서 취득한다. 동시에, 센서 헤드(2)는, 로프(1) 중 제 2 위치를 통과하는 부분의 표면에 형성된 요철을 나타내는 데이터를 제 2 표면 데이터로서 취득한다. 제 2 위치는, 제 1 위치와는 상이한 위치이다. 예컨대, 제 2 위치는, 제 1 위치로부터 y축 방향으로 일정 거리만큼 떨어진 위치이다. 도 1은 센서 헤드(2)가 광학식의 프로파일 측정기인 예를 나타낸다. 센서 헤드(2)는, 예컨대 광원(4), 광원(5), 수광 소자(6) 및 수광 소자(7)를 구비한다.
광원(4)은, 로프(1)의 표면에 광을 조사한다. 도 1 및 도 2는 광원(4)이 로프(1)의 긴 방향과 직교하는 방향으로 레이저광을 조사하는 예를 나타낸다. 광원(4)으로부터 조사된 광은, 로프(1) 중 제 1 위치를 통과하는 부분의 표면에 부딪친다. 도 1 및 도 2에 나타내는 예에서는, 광원(4)으로부터 조사된 광은, 로프(1)를 횡단하도록 로프(1)의 한쪽의 단으로부터 다른 쪽의 단에 걸쳐 직선 형상으로 부딪친다.
광원(5)은, 로프(1)의 표면에 광을 조사한다. 광원(5)은, 광원(4)으로부터 조사되는 광에 대하여 평행으로 광을 조사한다. 광원(5)이 광을 조사하는 타이밍은, 광원(4)이 광을 조사하는 타이밍과 동일하다. 도 1 및 도 2는 광원(5)이 로프(1)의 긴 방향과 직교하는 방향으로 레이저광을 조사하는 예를 나타낸다. 광원(5)으로부터 조사된 광은, 로프(1) 중 제 2 위치를 통과하는 부분의 표면에 부딪친다. 즉, 광원(5)으로부터 조사된 광은, 광원(4)으로부터의 광이 로프(1)에 부딪치는 위치로부터 y축 방향으로 일정 거리만큼 떨어진 위치에서 로프(1)에 부딪친다. 도 1 및 도 2에 나타내는 예에서는, 광원(5)으로부터 조사된 광은, 로프(1)를 횡단하도록 로프(1)의 한쪽의 단으로부터 다른 쪽의 단에 걸쳐 직선 형상으로 부딪친다.
수광 소자(6)는, 광원(4)으로부터 조사된 광 중 로프(1)의 표면에서 반사된 광을 수광한다. 수광 소자(6)는, 광원(4)이 광을 조사하는 방향에 대하여 비스듬하게 배치된다. 수광 소자(6)는, 로프(1)의 표면에서 반사된 광원(4)으로부터의 광 중, 로프(1)의 긴 방향에 대하여 일정한 각도로 비스듬하게 반사된 광을 수광한다.
수광 소자(7)는, 광원(5)으로부터 조사된 광 중 로프(1)의 표면에서 반사된 광을 수광한다. 수광 소자(7)는, 광원(5)이 광을 조사하는 방향에 대하여 비스듬하게 배치된다. 수광 소자(7)는, 로프(1)의 표면에서 반사된 광원(5)으로부터의 광 중, 로프(1)의 긴 방향에 대하여 일정한 각도로 비스듬하게 반사된 광을 수광한다. 예컨대, 수광 소자(7)는, 로프(1)의 표면에 있어서 수광 소자(6)가 수광하는 광과 동일한 각도로 반사된 광을 수광한다.
도 1 및 도 2에 나타내는 광 a는, 광원(4)으로부터 로프(1)로 향해 조사된 광이다. 예컨대, 광 a는 y=L1에서 로프(1)의 표면에 부딪친다. 광 b 및 광 c는, 로프(1)의 표면에서 반사된 광 a 중, 수광 소자(6)에 의해 수광되는 각도로 반사된 광이다. 광 b는, 스트랜드의 가장 바깥쪽으로 볼록한 부분에서 반사된 광이다. 광 c는, 이웃하는 스트랜드에 의해 형성된 홈의 부분에서 반사된 광이다. 수광 소자(6)가 광 b 및 광 c 등을 수광하는 것에 의해, 센서 헤드(2)는, 광원(4)으로부터의 광이 부딪친 부분의 단면 형상을 나타내는 데이터를 제 1 표면 데이터로서 취득한다.
도 1 및 도 2에 나타내는 광 d는, 광원(5)으로부터 로프(1)에 조사된 광이다. 예컨대, 광 d는 y=L2에서 로프(1)의 표면에 부딪친다. 광 e 및 광 f는, 로프(1)의 표면에서 반사된 광 d 중, 수광 소자(7)에 의해 수광되는 각도로 반사된 광이다. 광 e는, 스트랜드의 가장 바깥쪽으로 볼록한 부분에서 반사된 광이다. 광 f는, 이웃하는 스트랜드에 의해 형성된 홈의 부분에서 반사된 광이다. 수광 소자(7)가 광 e 및 광 f 등을 수광하는 것에 의해, 센서 헤드(2)는, 광원(5)으로부터의 광이 부딪친 부분의 단면 형상을 나타내는 데이터를 제 2 표면 데이터로서 취득한다.
도 3은 수광 소자(6) 및 수광 소자(7)에 의해 취득된 수광 화상의 처리 방법을 나타내는 도면이다. 도 3의 상단은, 수광 소자(6)의 수광 화상과 수광 소자(7)의 수광 화상을 나타낸다. 도 3의 하단은, 수광 소자(6)의 수광 화상으로부터 변환된 제 1 표면 데이터 P1과 수광 소자(7)의 수광 화상으로부터 변환된 제 2 표면 데이터 P2를 나타낸다. 도 3의 하단의 가로축은, 제 1 표면 데이터 P1 및 제 2 표면 데이터 P2가 x 방향으로 각각 복수 개의 데이터를 포함하는 것을 나타낸다. 표면 데이터가 포함하는 데이터의 개수는 임의로 결정된다.
본 실시의 형태에 나타내는 예에서는, 제어 장치(3)는, 센서 헤드(2)에 의해 취득된 제 1 표면 데이터 및 제 2 표면 데이터에 근거하여, 로프(1)에 발생한 피치 이상을 검출한다. 즉, 제어 장치(3)는, 긴 물체의 표면에 형성된 모양의 주기 이상을 검출한다. 도 1은 제어 장치(3)가 신호선(8)에 의해 센서 헤드(2)에 접속되는 예를 나타낸다. 센서 헤드(2)와 제어 장치(3)를 동일한 하우징 내에 배치하더라도 좋다. 제어 장치(3)가 갖는 기능의 일부를 센서 헤드(2)가 구비하더라도 좋다.
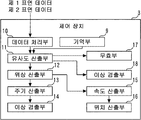
도 4는 제어 장치(3)의 예를 나타내는 도면이다. 제어 장치(3)는, 예컨대 기억부(9), 데이터 처리부(10), 유사도 산출부(11), 위상 산출부(12), 주기 산출부(13) 및 이상 검출부(14)를 구비한다.
기억부(9)에 2개의 레퍼런스 데이터가 기억된다. 이하의 설명에서는, 기억부(9)에 기억된 한쪽의 레퍼런스 데이터를 제 1 레퍼런스 데이터라고 표기한다. 기억부(9)에 기억된 또 한쪽의 레퍼런스 데이터를 제 2 레퍼런스 데이터라고 표기한다.
데이터 처리부(10)는, 센서 헤드(2)로부터 수신한 제 1 표면 데이터를 가공하고, 가공한 데이터를 최종적인 제 1 표면 데이터로서 출력한다. 데이터 처리부(10)는, 센서 헤드(2)로부터 수신한 제 2 표면 데이터를 가공하고, 가공한 데이터를 최종적인 제 2 표면 데이터로서 출력한다. 본 실시의 형태에 나타내는 예에서는, 데이터 처리부(10)는, 긴 물체의 표면 데이터를 취득하는 수단의 일부를 구성한다. 로프(1)의 피치 이상을 검출하는데 있어서는, 센서 헤드(2)에 의해 취득된 표면 데이터로부터 특정 주파수 성분을 제거한 데이터를 최종적인 표면 데이터로서 채용하는 것이 바람직하다. 이와 같은 데이터 처리를 행하는 것에 의해, 로프(1)가 표면에 갖는 주기적인 모양의 성분을 강조할 수 있다.
도 5는 데이터 처리부(10)의 기능을 설명하기 위한 도면이다. 도 5는 데이터 처리부(10)에 의한 데이터 처리가 행하여진 후의 제 1 표면 데이터 P1 및 제 2 표면 데이터 P2를 나타낸다. 데이터 처리부(10)는, 예컨대, 도 3에 나타내는 제 1 표면 데이터 P1에 대하여 저주파 성분 제거 처리를 행하는 것에 의해 도 5에 나타내는 제 1 표면 데이터 P1을 취득한다. 데이터 처리부(10)는, 예컨대, 도 3에 나타내는 제 2 표면 데이터 P2에 대하여 저주파 성분 제거 처리를 행하는 것에 의해 도 5에 나타내는 제 2 표면 데이터 P2를 취득한다. 도 5에 나타내는 예에서는, 도 3에 나타내는 제 1 표면 데이터 P1 및 제 2 표면 데이터 P2로부터, 로프(1)의 지름의 영향이 제거되어 있다.
데이터 처리부(10)의 기능은, 센서 헤드(2)에 구비되더라도 좋다. 또한, 긴 물체의 표면 데이터를 취득하는 수단은, 데이터 처리부(10)의 기능을 구비하고 있지 않더라도 좋다. 본 실시의 형태에 나타내는 예에서는, 데이터 처리부(10)로부터의 출력이 긴 물체의 표면 데이터를 취득하는 수단으로부터의 최종적인 출력이 된다. 데이터 처리부(10)가 구비되어 있지 않으면, 센서 헤드(2)로부터의 출력이 긴 물체의 표면 데이터를 취득하는 수단으로부터의 최종적인 출력이 된다.
광원(4) 및 광원(5)으로부터는 동시에 광이 출력된다. 시각 t에 위치 L1에서 취득된 제 1 표면 데이터 P1은, P(t, L1)로 표기할 수 있다. 동일한 시각 t에 위치 L2에서 취득된 제 2 표면 데이터 P2는, P(t, L2)로 표기할 수 있다. 제 1 표면 데이터 P(t, L1) 및 제 2 표면 데이터 P(t, L2)는, 하기와 같이 n행 1열의 행렬로 표기할 수 있다. n은, 예컨대 2 이상의 정수이다. 도 5는 n=150인 예를 나타낸다.

도 6은 레퍼런스 데이터의 예를 나타내는 도면이다. 상술한 바와 같이, 로프(1)는, 표면에 주기적인 모양을 갖는다. 예컨대, 로프(1)의 표면에 형성된 모양의 주기와 동일한 주기를 갖는 정현파가 제 1 레퍼런스 데이터로서 기억부(9)에 기억된다. 로프(1)의 표면에 형성된 모양의 주기와 동일한 주기를 갖는 여현파가 제 2 레퍼런스 데이터로서 기억부(9)에 기억된다. 제 1 레퍼런스 데이터 Ref1 및 제 2 레퍼런스 데이터 Ref2는, 하기와 같이 n행 1열의 행렬로 표기할 수 있다. 도 6은 n=150인 예를 나타낸다.

본 실시의 형태에서는, 제 1 표면 데이터 P(t, L1), 제 2 표면 데이터 P(t, L2), 제 1 레퍼런스 데이터 Ref1 및 제 2 레퍼런스 데이터 Ref2가 다차원의 벡터 데이터, 즉 요소 수 n의 벡터인 예에 대하여 설명한다. 제 1 레퍼런스 데이터 Ref1과 제 2 레퍼런스 데이터 Ref2의 내적은, 도 6에 나타내는 예와 같이 0인 것이 바람직하다. 도 6에 나타내는 제 1 레퍼런스 데이터 Ref1과 제 2 레퍼런스 데이터 Ref2는 직교 관계에 있는 정현파이다. 단, 제 1 레퍼런스 데이터 Ref1과 제 2 레퍼런스 데이터 Ref2의 내적은 0이 아니더라도 좋다. 제 1 레퍼런스 데이터 Ref1 및 제 2 레퍼런스 데이터 Ref2는, 도 6에 나타내는 예로 한정되지 않는다.
유사도 산출부(11)는, 표면 데이터와 레퍼런스 데이터의 유사도를 산출한다. 예컨대, 유사도 산출부(11)는, 제 1 유사도, 제 2 유사도, 제 3 유사도 및 제 4 유사도를 산출한다. 제 1 유사도는, 데이터 처리부(10)로부터 출력된 제 1 표면 데이터와 기억부(9)에 기억된 제 1 레퍼런스 데이터의 유사도이다. 제 2 유사도는, 데이터 처리부(10)로부터 출력된 제 1 표면 데이터와 기억부(9)에 기억된 제 2 레퍼런스 데이터의 유사도이다. 제 3 유사도는, 데이터 처리부(10)로부터 출력된 제 2 표면 데이터와 기억부(9)에 기억된 제 1 레퍼런스 데이터의 유사도이다. 제 4 유사도는, 데이터 처리부(10)로부터 출력된 제 2 표면 데이터와 기억부(9)에 기억된 제 2 레퍼런스 데이터의 유사도이다.
예컨대, 유사도 산출부(11)는, 제 1 표면 데이터 P(t, L1)과 제 1 레퍼런스 데이터 Ref1의 상관 계수 ρ1(t, L1)을 제 1 유사도로서 산출한다. 유사도 산출부(11)는, 제 1 표면 데이터 P(t, L1)과 제 2 레퍼런스 데이터 Ref2의 상관 계수 ρ2(t, L1)을 제 2 유사도로서 산출한다. 유사도 산출부(11)는, 제 2 표면 데이터 P(t, L2)와 제 1 레퍼런스 데이터 Ref1의 상관 계수 ρ1(t, L2)를 제 3 유사도로서 산출한다. 유사도 산출부(11)는, 제 2 표면 데이터 P(t, L2)와 제 2 레퍼런스 데이터 Ref2의 상관 계수 ρ2(t, L2)를 제 4 유사도로서 산출한다.
도 7은 위상 산출부(12)의 기능을 설명하기 위한 도면이다. 위상 산출부(12)는, 유사도 벡터 S의 편각을 위상 θ로서 산출한다. 본 실시의 형태에 나타내는 예에서는, 위상 산출부(12)는, 제 1 표면 데이터에 관한 유사도 벡터 S(t, L1)의 위상 θ(t, L1)을 산출한다. 유사도 벡터 S(t, L1)은, 유사도 산출부(11)에 의해 산출된 상관 계수 ρ1(t, L1)과 상관 계수 ρ2(t, L1)을 요소로 하는 벡터이다. 위상 θ(t, L1)은, 유사도 벡터 S(t, L1)의 편각이다. 또한, 위상 산출부(12)는, 제 2 표면 데이터에 관한 유사도 벡터 S(t, L2)의 위상 θ(t, L2)를 산출한다. 유사도 벡터 S(t, L2)는, 유사도 산출부(11)에 의해 산출된 상관 계수 ρ1(t, L2)와 상관 계수 ρ2(t, L2)를 요소로 하는 벡터이다. 위상 θ(t, L2)는, 유사도 벡터 S(t, L2)의 편각이다.
도 7은 제 1 레퍼런스 데이터 Ref1과의 유사도를 가로축으로 하고, 제 2 레퍼런스 데이터 Ref2와의 유사도를 세로축으로 한 직교 평면 상에, 유사도 벡터 S(t, L1) 및 유사도 벡터 S(t, L2)를 플롯한 예를 나타낸다. 예컨대, 로프(1)가 -y 방향으로 이동하면, 유사도 벡터 S(t, L1) 및 유사도 벡터 S(t, L2)는, 도 7에 나타내는 B 방향으로 회전한다. 유사도 벡터 S(t, L1)의 궤적은, 반경이 최대 1이 되는 원 형상이다. 마찬가지로, 유사도 벡터 S(t, L2)의 궤적은, 반경이 최대 1이 되는 원 형상이다. 로프(1)가 1스트랜드 피치분의 거리만큼 이동하면, 유사도 벡터 S(t, L1) 및 유사도 벡터 S(t, L2)는 1회전한다.
주기 산출부(13)는, 로프(1)의 표면에 형성된 모양의 주기를 산출한다. 본 실시의 형태에 나타내는 예에서는, 상술한 바와 같이, 상기 주기는 로프(1)의 스트랜드 피치에 일치한다. 도 7에 나타내는 바와 같이, 유사도 벡터 S의 시점은 원점이다. 유사도 벡터 S의 종점은, 그 유사도 벡터의 요소, 즉 유사도 산출부(11)에 의해 산출된 2개의 유사도를 좌표로 하는 점이다. 위상 θ는, 유사도 벡터 S의 방향을 나타낸다. 주기 산출부(13)는, 로프(1)의 스트랜드 피치 SP를 다음 식에 의해 산출할 수 있다.
위의 식에 나타내는 바와 같이, 주기 산출부(13)는, 위상 산출부(12)에 의해 산출된 위상 θ(t, L1)과 위상 θ(t, L2)에 근거하여, 스트랜드 피치 SP를 산출한다. 예컨대, 주기 산출부(13)는, y축 방향의 위치 변화에 대응한 위상의 위치적 변화율을 산출하는 것에 의해, 스트랜드 피치 SP를 구한다.
이상 검출부(14)는, 로프(1)에 발생한 이상을 검출한다. 이상 검출부(14)는, 예컨대 주기 산출부(13)에 의해 산출된 주기에 근거하여, 긴 물체에 형성된 모양의 주기 이상을 검출한다. 예컨대, 기억부(9)에, 모양의 주기가 정상인 것을 판정하기 위한 기준 범위가 미리 기억된다. 이상 검출부(14)는, 주기 산출부(13)에 의해 산출된 주기가 상기 기준 범위에 들어가 있으면, 로프(1)에 피치 이상이 발생하고 있지 않다고 판정한다. 이상 검출부(14)는, 주기 산출부(13)에 의해 산출된 주기가 상기 기준 범위에 들어가 있지 않으면, 로프(1)에 피치 이상이 발생하고 있다고 판정한다.
도 8은 본 발명의 실시의 형태 1에 있어서의 검출 장치의 동작의 예를 나타내는 플로차트이다. 도 8은 상술한 처리 흐름을 나타낸다. 이상 검출부(14)에 의해 피치 이상이 검출되면, 제어 장치(3)로부터 경보를 발하더라도 좋다.
본 실시의 형태에 나타내는 예이면, 로프(1)의 이동 속도가 변동하고 있는 경우에도, 로프(1)의 이상을 검출할 수 있다. 본 검출 장치는, 노이즈 내성이 높다고 하는 이점도 있다.
이하에, 본 검출 장치가 구비하는 것이 가능한 다른 기능에 대하여 설명한다.
제어 장치(3)는, 속도 산출부(15) 및 위치 산출부(16)를 더 구비하더라도 좋다. 속도 산출부(15)는, 로프(1)가 이동하는 속도를 산출한다. 속도 산출부(15)는, 시각 t에 있어서의 로프(1)의 이동 속도 V를 다음 식에 의해 산출할 수 있다.

도 8에 나타내는 동작은, 예컨대 일정한 주기로 반복하여 행하여진다. 위의 식에 나타내는 Δt는, 표면 데이터를 취득하는 시간 간격이다. 위의 식에 나타내는 바와 같이, 속도 산출부(15)는, 위상 산출부(12)에 의해 산출된 위상 θ(t, L1)과 위상 θ(t, L2)에 근거하여, 로프(1)의 이동 속도를 산출한다. 예컨대, 속도 산출부(15)는, 위상 θ(t, L1) 혹은 위상 θ(t, L2)의 시간 경과에 따른 변화를 산출하는 것에 의해, 로프(1)의 이동 속도를 구한다.
위치 산출부(16)는, 로프(1)에 발생한 이상의 위치를 산출한다. 위치 산출부(16)는, 속도 산출부(15)에 의해 산출된 로프(1)의 이동 속도 V에 근거하여, 상기 위치의 산출을 행한다. 예컨대, 위치 산출부(16)는, 속도 산출부(15)에 의해 산출된 로프(1)의 이동 속도 V를 적분하는 것에 의해, 표면 데이터의 취득 개시 위치로부터 로프(1)가 얼마나 이동했는지를 특정할 수 있다. 위치 산출부(16)는, 이상 검출부(14)에 의해 이상이 검출되었을 때의 이동 거리에 근거하여, 검출된 이상의 로프(1) 상의 위치를 산출한다. 상기 산출 방법이면, 로프(1)의 스트랜드 피치가 미지이거나 변동하거나 하더라도, 위치의 산출이 가능하다.
제어 장치(3)는, 무효부(17)를 더 구비하더라도 좋다. 무효부(17)는, 이상 검출부(14)에 의한 이상 검출을 무효로 한다. 도 7에 나타내는 바와 같이, 유사도 벡터 S(t, L1)의 궤적은 원 형상이다. 복수의 스트랜드가 꼬아 합쳐지는 것에 의해 형성되는 요철이 로프(1)의 표면에 깔끔하게 늘어서 있으면, 유사도 벡터 S(t, L1)의 궤적은, 원점을 중심으로 한 동일한 원을 계속 그린다.
한편, 제어 장치(3)가 받는 신호에 무시할 수 없는 큰 노이즈가 포함되는 등 하여, 신호 전송에 이상이 발생하면, 유사도 벡터 S(t, L1)의 궤적은 원점에 가까워지도록 변화한다. 이 때문에, 유사도 벡터 S(t, L1)의 놈(norm)에 대하여 미리 정상 범위를 설정하여 두면, 취득된 표면 데이터의 신뢰성이 낮아진 것을 검출할 수 있다. 상기 정상 범위는, 예컨대 0.3으로부터 1로 설정된다. 마찬가지의 것은, 유사도 벡터 S(t, L2)에 관해서도 말할 수 있다.
예컨대, 무효부(17)는, 유사도 벡터 S(t, L1)의 놈에 근거하여, 이상 검출부(14)가 이상을 검출하는 기능을 무효로 한다. 무효부(17)는, 유사도 벡터 S(t, L1)의 놈이 상기 정상 범위로부터 벗어나 있으면, 이상 검출부(14)에 의해 이상이 검출되지 않도록 한다. 무효부(17)는, 유사도 벡터 S(t, L2)의 놈에 근거하여, 이상 검출부(14)가 이상을 검출하는 기능을 무효로 하더라도 좋다. 예컨대, 무효부(17)는, 유사도 벡터 S(t, L2)의 놈이 상기 정상 범위로부터 벗어나 있으면, 이상 검출부(14)에 의해 이상이 검출되지 않도록 한다. 무효부(17)는, 유사도 벡터 S(t, L1)의 놈 및 유사도 벡터 S(t, L2)의 놈의 양쪽이 상기 정상 범위로부터 벗어나 있는 경우에, 이상 검출부(14)에 의한 이상 검출을 무효로 하더라도 좋다.
무효부(17)에 의해 이상 검출부(14)에 의한 이상 검출 기능이 무효로 되어 있는 동안, 위치 산출부(16)는, 직전에 산출된 스트랜드 피치 SP를 이용하여 로프(1)의 이동 거리를 산출하더라도 좋다. 이것에 의해, 적절한 보간이 가능하게 된다.
제어 장치(3)는, 이상 검출부(18)를 더 구비하더라도 좋다. 이상 검출부(18)는, 이상 검출부(14)가 검출하는 이상과는 상이한 로프(1)의 이상을 검출한다. 예컨대, 이상 검출부(18)는, 로프(1)의 표면에 형성된 모양의 이상을 검출한다.
상술한 바와 같이, 유사도 벡터 S(t, L1)의 궤적은 원 형상이다. 신호 전송에 이상이 발생하고 있지 않은 경우, 복수의 스트랜드가 꼬아 합쳐지는 것에 의해 형성되는 요철이 로프(1)의 표면에 깔끔하게 늘어서 있으면, 유사도 벡터 S(t, L1)의 궤적은, 원점을 중심으로 한 동일한 원을 계속 그린다. 한편, 스트랜드의 간격이 불균일하게 되는 등 하여, 꼬임에 불량이 발생하면, 유사도 벡터 S(t, L1)의 궤적은 원점에 가까워지도록 변화한다. 이 때문에, 유사도 벡터 S(t, L1)의 놈에 대하여 미리 정상 범위를 설정하여 두면, 로프(1)의 표면에 형성된 모양에 이상이 발생하고 있는 것을 검출할 수 있다. 상기 정상 범위는, 예컨대 0.6으로부터 1로 설정된다. 마찬가지의 것은, 유사도 벡터 S(t, L2)에 관해서도 말할 수 있다.
예컨대, 이상 검출부(18)는, 유사도 벡터 S(t, L1)의 놈에 근거하여, 로프(1)의 모양에 이상이 발생한 것을 검출한다. 이상 검출부(18)는, 유사도 벡터 S(t, L1)의 놈이 상기 정상 범위로부터 벗어나 있으면, 로프(1)의 모양에 이상이 발생한 것을 검출한다. 본 실시의 형태에 나타내는 예이면, 이상 검출부(18)는, 로프(1)의 형상 이상을 검출한다. 이상 검출부(18)는, 유사도 벡터 S(t, L2)의 놈에 근거하여, 로프(1)의 모양에 이상이 발생한 것을 검출하더라도 좋다. 예컨대, 이상 검출부(18)는, 유사도 벡터 S(t, L2)의 놈이 상기 정상 범위로부터 벗어나 있으면, 로프(1)의 형상 이상을 검출한다. 이상 검출부(18)는, 유사도 벡터 S(t, L1)의 놈 및 유사도 벡터 S(t, L2)의 놈의 양쪽이 상기 정상 범위로부터 벗어나 있는 경우에, 로프(1)의 형상 이상을 검출하더라도 좋다.
이상 검출부(18)에 의해 모양의 이상이 검출된 경우에, 그 이상을 확인할 수 있는 데이터를 기억부(9)에 기억시키더라도 좋다. 예컨대, 이상 검출부(18)에 의해 모양의 이상이 검출되면, 그 이상을 검출하기 위해 사용된 표면 데이터를 기억부(9)에 기억시킨다. 후술하지만, 센서 헤드(2)는, 표면 데이터를 취득하기 위해 카메라를 구비하더라도 좋다. 이상 검출부(18)에 의해 모양의 이상이 검출된 경우에, 카메라에 의해 촬영된 화상 데이터를 기억부(9)에 기억시키더라도 좋다.
도 9는 센서 헤드(2)의 다른 예를 설명하기 위한 도면이다. 도 9에 나타내는 센서 헤드(2)는, 예컨대 광원(4), 광원(5) 및 수광 소자(6)를 구비한다. 도 9는 로프(1)의 표면에서 반사된 광원(4)으로부터의 광과 로프(1)의 표면에서 반사된 광원(5)으로부터의 광의 양쪽을 1개의 수광 소자(6)로 받는 예를 나타낸다. 도 9에 나타내는 예에서는, 광원(5)은, 광원(4)으로부터의 광의 파장과는 상이한 파장의 광을 로프(1)에 부딪치게 하는 것이 바람직하다.
도 10은 수광 소자(6)에 의해 취득된 수광 화상의 처리 방법을 나타내는 도면이다. 도 10의 상단은, 수광 소자(6)의 수광 화상을 나타낸다. 도 10의 하단은, 수광 소자(6)의 수광 화상으로부터 변환된 제 1 표면 데이터 P1 및 제 2 표면 데이터 P2를 나타낸다. 도 10의 하단의 가로축은, 제 1 표면 데이터 P1 및 제 2 표면 데이터 P2가 x 방향으로 각각 복수 개의 데이터를 포함하는 것을 나타낸다. 표면 데이터가 포함하는 데이터의 개수는 임의로 결정된다.
도 9 및 도 10에 나타내는 예이면, 센서 헤드(2)에 복수의 수광 소자를 구비할 필요가 없다. 또한, 광원(4)으로부터의 광의 파장과 광원(5)으로부터의 광의 파장이 상이하면, 표면 데이터의 추출 처리를 용이하게 행할 수 있다.
센서 헤드(2)는, 광학식의 프로파일 측정기로 한정되지 않는다. 도 11 및 도 12는 센서 헤드(2)의 다른 예를 설명하기 위한 도면이다. 도 11 및 도 12에 나타내는 센서 헤드(2)는, 예컨대 카메라(20)를 구비한다. 센서 헤드(2)는, 카메라(20)에 의해 로프(1)의 표면을 촬영한 화상 데이터로부터 얻어지는 데이터를 표면 데이터로서 취득하더라도 좋다.
카메라(20)에 의해 촬영된 화상 데이터에는, 높이에 관한 정보가 포함되지 않는다. 센서 헤드(2)는, 로프(1)의 표면에 부여된 색 및 색의 농담을 나타내는 데이터를 표면 데이터로서 취득하더라도 좋다. 예컨대, 센서 헤드(2)는, 로프(1)의 표면 중 x1≤x≤xr 및 L1≤y≤LM의 범위에 부여된 색 및 색의 농담을 나타내는 데이터를 취득한다. 이 데이터는, M개의 표면 데이터에 상당한다. 센서 헤드(2)는, M개의 표면 데이터 중에서, 미리 설정된 2개의 표면 데이터를 제 1 표면 데이터 및 제 2 표면 데이터로서 출력한다.
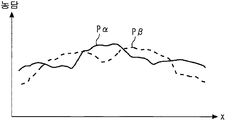
도 13은 카메라(20)에 의해 촬영된 화상 데이터의 처리 방법을 나타내는 도면이다. 도 13은 로프(1) 중 y=Lα의 위치를 통과하는 부분의 표면에 부여된 색 및 색의 농담을 나타내는 데이터를 제 1 표면 데이터 Pα로서 취득하는 예를 나타낸다. 마찬가지로, 도 13은 로프(1) 중 y=Lβ의 위치를 통과하는 부분의 표면에 부여된 색 및 색의 농담을 나타내는 데이터를 제 2 표면 데이터 Pβ로서 취득하는 예를 나타낸다.
실시의 형태 2.
본 실시의 형태에서는, 스트랜드 피치 SP의 산출 정밀도를 향상시키기 위한 예에 대하여 설명한다. 본 실시의 형태에 있어서의 검출 장치는, 예컨대 도 11에 나타내는 예와 마찬가지이다. 검출 장치는, 예컨대 센서 헤드(2)와 제어 장치(3)를 구비한다. 센서 헤드(2)는, 예컨대 카메라(20)를 구비한다.
센서 헤드(2)는, 예컨대, 로프(1)의 표면에 부여된 색 및 색의 농담을 나타내는 데이터를 표면 데이터로서 취득한다. 센서 헤드(2)는, 카메라(20)에 의해 취득된 화상 데이터로부터 M개의 표면 데이터를 취득한다. M은, 예컨대 3 이상의 자연수이다.
도 14는 본 발명의 실시의 형태 2에 있어서의 제어 장치(3)의 예를 나타내는 도면이다. 도 14에 나타내는 예에서는, 제어 장치(3)는, 기억부(9), 데이터 처리부(10), 선택부(19), 유사도 산출부(11), 위상 산출부(12), 주기 산출부(13) 및 이상 검출부(14)를 구비한다. 제어 장치(3)는, 데이터 처리부(10)를 구비하지 않더라도 좋다. 제어 장치(3)는, 속도 산출부(15), 위치 산출부(16), 무효부(17) 및 이상 검출부(18)를 더 구비하더라도 좋다.
기억부(9)에, 제 1 레퍼런스 데이터 Ref1 및 제 2 레퍼런스 데이터 Ref2가 기억된다. 예컨대, 제 1 레퍼런스 데이터 Ref1은 n행 1열의 행렬로 표기할 수 있다. 제 2 레퍼런스 데이터 Ref2는 n행 1열의 행렬로 표기할 수 있다.
데이터 처리부(10)는, 센서 헤드(2)로부터 수신한 각 표면 데이터를, 레퍼런스 데이터와 비교 가능한 표면 데이터로 가공한다. 예컨대, 데이터 처리부(10)는, 센서 헤드(2)로부터 수신한 표면 데이터의 각각에 대하여, 바이어스 제거 처리를 행한다. 데이터 처리부(10)로부터는, 예컨대 바이어스 제거 처리가 행하여진 M개의 표면 데이터 P(t, L1), P(t, L2), …, P(t, LM)이 출력된다. 표면 데이터 P(t, L1)은, 로프(1) 중 시각 t에 y=L1을 통과하는 부분의 표면에 부여된 색 및 색의 농담을 나타내는 데이터이다. 표면 데이터 P(t, L2)는, 로프(1) 중 시각 t에 y=L2를 통과하는 부분의 표면에 부여된 색 및 색의 농담을 나타내는 데이터이다. 표면 데이터 P(t, LM)은, 로프(1) 중 시각 t에 y=LM을 통과하는 부분의 표면에 부여된 색 및 색의 농담을 나타내는 데이터이다. L1로부터 LM의 값은 미리 설정된다.
선택부(19)는, 데이터 처리부(10)로부터 출력된 M개의 표면 데이터 중에서, 미리 설정된 조건에 근거하여, 제 1 표면 데이터 P(t, Lα)와 제 2 표면 데이터 P(t, Lβ)를 선택한다.
유사도 산출부(11)는, 선택부(19)에 의해 선택된 표면 데이터와 레퍼런스 데이터의 유사도를 산출한다. 즉, 유사도 산출부(11)는, 제 1 유사도, 제 2 유사도, 제 3 유사도 및 제 4 유사도를 산출한다. 제 1 유사도는, 선택부(19)에 의해 선택된 제 1 표면 데이터와 기억부(9)에 기억된 제 1 레퍼런스 데이터의 유사도이다. 제 2 유사도는, 선택부(19)에 의해 선택된 제 1 표면 데이터와 기억부(9)에 기억된 제 2 레퍼런스 데이터의 유사도이다. 제 3 유사도는, 선택부(19)에 의해 선택된 제 2 표면 데이터와 기억부(9)에 기억된 제 1 레퍼런스 데이터의 유사도이다. 제 4 유사도는, 선택부(19)에 의해 선택된 제 2 표면 데이터와 기억부(9)에 기억된 제 2 레퍼런스 데이터의 유사도이다.
위상 산출부(12)의 기능은 실시의 형태 1에서 개시한 기능과 마찬가지이다. 주기 산출부(13)의 기능은 실시의 형태 1에서 개시한 기능과 마찬가지이다. 이상 검출부(14)의 기능은 실시의 형태 1에서 개시한 기능과 마찬가지이다.
도 15는 본 발명의 실시의 형태 2에 있어서의 검출 장치의 동작의 예를 나타내는 플로차트이다. 상술한 바와 같이, 데이터 처리부(10)로부터는 M개의 표면 데이터가 출력된다(S201). 선택부(19)는, 데이터 처리부(10)로부터 출력된 M개의 표면 데이터 중에서, 제 1 표면 데이터 P(t, Lα)와 제 2 표면 데이터 P(t, Lβ)를 선택한다(S202).
예컨대, 유사도 산출부(11)는, 데이터 처리부(10)로부터 출력된 각 표면 데이터에 대하여, 제 1 레퍼런스 데이터와의 유사도 및 제 2 레퍼런스 데이터와의 유사도를 산출한다. 도 15는 제 1 레퍼런스 데이터와의 유사도로서 상관 계수 ρ1이, 제 2 레퍼런스 데이터와의 유사도로서 상관 계수 ρ2가 산출되는 예를 나타낸다. 다음으로, 각 표면 데이터에 대하여, 상관 계수 ρ1과 상관 계수 ρ2를 요소로 하는 유사도 벡터 S가 산출된다. 또한, 각 표면 데이터에 대하여, 유사도 벡터 S의 놈이 산출된다.
선택부(19)는, 예컨대 산출된 유사도 벡터 S의 놈에 근거하여, 제 1 표면 데이터 P(t, Lα)와 제 2 표면 데이터 P(t, Lβ)를 선택한다. 도 16은 선택부(19)의 기능을 설명하기 위한 도면이다. 선택부(19)는, 예컨대, 데이터 처리부(10)로부터 출력된 M개의 표면 데이터 중, 유사도 벡터 S의 놈이 가장 큰 것과 2번째로 큰 것을 제 1 표면 데이터 P(t, Lα) 및 제 2 표면 데이터 P(t, Lβ)로서 선택한다. 여기서, Lβ>Lα이다.
S202에 있어서 제 1 표면 데이터 P(t, Lα) 및 제 2 표면 데이터 P(t, Lβ)가 선택되면, 도 8의 S103으로부터 S106에 나타내는 처리와 마찬가지의 처리가 행하여진다. 도 15에 나타내는 예에서는, S202에 있어서 ρ1(t, Lα), ρ2(t, Lα), ρ1(t, Lβ) 및 ρ2(t, Lβ)가 이미 산출되어 있다. 제 1 표면 데이터 P(t, Lα) 및 제 2 표면 데이터 P(t, Lβ)가 선택부(19)에 의해 선택되면, 위상 산출부(12)는, 유사도 벡터 S(t, Lα)의 위상 θ(t, Lα)를 산출한다(S203). 유사도 벡터 S(t, Lα)는, 유사도 산출부(11)에 의해 산출된 상관 계수 ρ1(t, Lα)와 상관 계수 ρ2(t, Lα)를 요소로 하는 벡터이다. 위상 θ(t, Lα)는, 유사도 벡터 S(t, Lα)의 편각이다. 또한, 위상 산출부(12)는, 유사도 벡터 S(t, Lβ)의 위상 θ(t, Lβ)를 산출한다(S203). 유사도 벡터 S(t, Lβ)는, 유사도 산출부(11)에 의해 산출된 상관 계수 ρ1(t, Lβ)와 상관 계수 ρ2(t, Lβ)를 요소로 하는 벡터이다. 위상 θ(t, Lβ)는, 유사도 벡터 S(t, Lβ)의 편각이다.
주기 산출부(13)는, 예컨대 위상 산출부(12)에 의해 산출된 위상 θ(t, Lα)와 위상 θ(t, Lβ)에 근거하여, 다음 식으로부터 스트랜드 피치 SP를 산출한다.
이상 검출부(14)는, 주기 산출부(13)에 의해 산출된 주기에 근거하여, 긴 물체에 형성된 모양의 주기 이상을 검출한다. 예컨대, 이상 검출부(14)는, 주기 산출부(13)에 의해 산출된 주기가 기준 범위로부터 벗어난 경우에, 로프(1)에 피치 이상이 발생하고 있다고 판정한다.
본 실시의 형태에 나타내는 예이면, 로프(1)의 이동 속도가 변동하고 있는 경우에도, 로프(1)의 이상을 검출할 수 있다. 본 실시의 형태에 나타내는 예이면, 스트랜드 피치 SP의 산출 정밀도를 향상시킬 수 있다.
노이즈의 영향을 적게 하기 위해, 선택부(19)는, 상술한 방법과는 상이한 방법에 의해 제 1 표면 데이터 P(t, Lα)와 제 2 표면 데이터 P(t, Lβ)를 선택하더라도 좋다. 예컨대, 선택부(19)는, 먼저, 데이터 처리부(10)로부터 출력된 M개의 표면 데이터 중, 유사도 벡터 S의 놈이 기준치 이상인 것을 선택한다. 상기 기준치는, 기억부(9)에 미리 기억된다. 예컨대, 기준치는 0.3이다. 선택부(19)는, 유사도 벡터 S의 놈이 기준치 이상인 것 중에서, 이루는 각도가 최대가 되는 2개의 것을 제 1 표면 데이터 P(t, Lα) 및 제 2 표면 데이터 P(t, Lβ)로서 선택한다.
본 실시의 형태에서 개시하지 않는 특징에 대해서는, 실시의 형태 1에서 개시된 어느 특징이 채용되더라도 좋다.
실시의 형태 3.
상술한 바와 같이, 본 검출 장치의 검출 대상이 되는 긴 물체의 예로서, 엘리베이터에서 사용되는 와이어 로프를 들 수 있다. 엘리베이터의 카(car)는, 예컨대 복수 개의 와이어 로프에 의해 승강로에 매달린다. 엘리베이터의 카가 복수 개의 와이어 로프로 매달려 있는 경우, 어느 와이어 로프에 대해서도 동일한 장력이 작용하는 것이 바람직하다.
예컨대, 1개의 와이어 로프에만 큰 장력이 작용하면, 그 와이어 로프에 연신이 발생한다. 연신이 발생한 와이어 로프에서는, 스트랜드 피치가 길어진다. 즉, 당해 와이어 로프에 피치 이상이 발생한다. 본 실시의 형태에서는, 검출 장치가 복수 개의 긴 물체를 검출 대상으로 하는 예에 대하여 설명한다.
도 17은 본 발명의 실시의 형태 3에 있어서의 검출 장치의 예를 나타내는 도면이다. 도 18은 도 17에 나타내는 화살표 A의 방향으로부터 긴 물체를 본 도면이다. 도 18은 로프(1)와 평행하게 로프(21)가 배치되어 있는 예를 나타낸다.
로프(21)는, 로프(1)와 마찬가지로, 긴 방향으로 이동한다. 예컨대, 로프(21)는, +y 방향 혹은 -y 방향으로 이동한다. 로프(21)는, +y 방향 및 -y 방향의 양쪽으로 이동하더라도 좋다. 로프(21)는, 복수의 스트랜드를 구비한다. 로프(21)는, 복수의 스트랜드가 꼬아 합쳐지는 것에 의해 형성된다. 로프(21)는, 로프(1)의 표면에 형성된 모양과 동일한 모양을 표면에 갖는다.
검출 장치는, 예컨대 센서 헤드(2)와 제어 장치(3)를 구비한다. 센서 헤드(2)는, 예컨대 광원(4) 및 수광 소자(6)를 구비한다. 본 실시의 형태에 나타내는 예에서는, 광원(4)은, 로프(1)의 표면 및 로프(21)의 표면의 양쪽에 대하여 동시에 광을 조사한다. 도 17 및 도 18은 광원(4)이 로프(1)의 긴 방향 및 로프(21)의 긴 방향과 직교하는 방향으로 레이저광을 조사하는 예를 나타낸다. 광원(4)으로부터 조사된 광은, 동일한 높이에서 로프(1) 및 로프(21)에 부딪친다. 도 17 및 도 18에 나타내는 예에서는, 광원(4)으로부터 조사된 광은, 로프(1)를 횡단하도록 로프(1)의 한쪽의 단으로부터 다른 쪽의 단에 걸쳐 직선 형상으로 부딪친다. 마찬가지로, 광원(4)으로부터 조사된 광은, 로프(21)를 횡단하도록 로프(21)의 한쪽의 단으로부터 다른 쪽의 단에 걸쳐 직선 형상으로 부딪친다.
수광 소자(6)는, 광원(4)으로부터 조사된 광 중 로프(1)의 표면에서 반사된 광을 수광한다. 또한, 수광 소자(6)는, 광원(4)으로부터 조사된 광 중 로프(21)의 표면에서 반사된 광을 수광한다. 수광 소자(6)는, 광원(4)이 광을 조사하는 방향에 대하여 비스듬하게 배치된다. 수광 소자(6)는, 로프(1)의 표면에서 반사된 광원(4)으로부터의 광 중, 로프(1)의 긴 방향에 대하여 일정한 각도로 비스듬하게 반사된 광을 수광한다. 마찬가지로, 수광 소자(6)는, 로프(21)의 표면에서 반사된 광원(4)으로부터의 광 중, 로프(1)의 긴 방향에 대하여 일정한 각도로 비스듬하게 반사된 광을 수광한다.
도 17 및 도 18에 나타내는 광 a는, 광원(4)으로부터 로프(1)로 향해 조사된 광이다. 예컨대, 광 a는 y=L1에서 로프(1)의 표면에 부딪친다. 광 b 및 광 c는, 로프(1)의 표면에서 반사된 광 a 중, 수광 소자(6)에 의해 수광되는 각도로 반사된 광이다. 수광 소자(6)가 광 b 및 광 c 등을 수광하는 것에 의해, 센서 헤드(2)는, 로프(1) 중 광원(4)으로부터의 광이 부딪친 부분의 단면 형상을 나타내는 데이터를 제 1 표면 데이터로서 취득한다.
마찬가지로, 도 17 및 도 18에 나타내는 광 g는, 광원(4)으로부터 로프(21)로 향해 조사된 광이다. 예컨대, 광 g는 y=L1에서 로프(21)의 표면에 부딪친다. 광 h 및 광 i는, 로프(21)의 표면에서 반사된 광 g 중, 수광 소자(6)에 의해 수광되는 각도로 반사된 광이다. 수광 소자(6)가 광 h 및 광 i 등을 수광하는 것에 의해, 센서 헤드(2)는, 로프(21) 중 광원(4)으로부터의 광이 부딪친 부분의 단면 형상을 나타내는 데이터를 제 2 표면 데이터로서 취득한다.
도 19는 수광 소자(6)에 의해 취득된 수광 화상의 처리 방법을 나타내는 도면이다. 도 19의 상단은, 수광 소자(6)의 수광 화상을 나타낸다. 도 19의 하단은, 수광 소자(6)의 수광 화상으로부터 변환된 제 1 표면 데이터 P3 및 제 2 표면 데이터 P4를 나타낸다. 도 19의 하단의 가로축은, 제 1 표면 데이터 P3 및 제 2 표면 데이터 P4가 x 방향으로 각각 복수 개의 데이터를 포함하는 것을 나타낸다. 표면 데이터가 포함하는 데이터의 개수는 임의로 결정된다.
도 20은 제어 장치(3)의 예를 나타내는 도면이다. 제어 장치(3)는, 예컨대 기억부(9), 데이터 처리부(10), 유사도 산출부(11), 위상 산출부(12) 및 이상 검출부(14)를 구비한다. 제어 장치(3)는, 데이터 처리부(10)를 구비하지 않더라도 좋다. 제어 장치(3)는, 무효부(17) 및 이상 검출부(18)를 더 구비하더라도 좋다.
기억부(9)에, 제 1 레퍼런스 데이터 Ref1 및 제 2 레퍼런스 데이터 Ref2가 기억된다. 예컨대, 제 1 레퍼런스 데이터 Ref1은 n행 1열의 행렬로 표기할 수 있다. 제 2 레퍼런스 데이터 Ref2는 n행 1열의 행렬로 표기할 수 있다.
데이터 처리부(10)는, 예컨대 센서 헤드(2)로부터 수신한 제 1 표면 데이터를 가공하고, 가공한 데이터를 최종적인 제 1 표면 데이터로서 출력한다. 데이터 처리부(10)는, 예컨대 센서 헤드(2)로부터 수신한 제 2 표면 데이터를 가공하고, 가공한 데이터를 최종적인 제 2 표면 데이터로서 출력한다.
유사도 산출부(11)는, 표면 데이터와 레퍼런스 데이터의 유사도를 산출한다. 예컨대, 유사도 산출부(11)는, 데이터 처리부(10)로부터 출력된 제 1 표면 데이터 P3(t, L1)과 제 1 레퍼런스 데이터 Ref1의 상관 계수 ρ1(t, L1(P3))을 제 1 유사도로서 산출한다. 유사도 산출부(11)는, 데이터 처리부(10)로부터 출력된 제 1 표면 데이터 P3(t, L1)과 제 2 레퍼런스 데이터 Ref2의 상관 계수 ρ2(t, L1(P3))을 제 2 유사도로서 산출한다. 유사도 산출부(11)는, 데이터 처리부(10)로부터 출력된 제 2 표면 데이터 P4(t, L1)과 제 1 레퍼런스 데이터 Ref1의 상관 계수 ρ1(t, L1(P4))를 제 3 유사도로서 산출한다. 유사도 산출부(11)는, 데이터 처리부(10)로부터 출력된 제 2 표면 데이터 P4(t, L1)과 제 2 레퍼런스 데이터 Ref2의 상관 계수 ρ2(t, L1(P4))를 제 4 유사도로서 산출한다.
도 21은 위상 산출부(12)의 기능을 설명하기 위한 도면이다. 위상 산출부(12)는, 유사도 벡터 S의 편각을 위상 θ로서 산출한다. 본 실시의 형태에 나타내는 예에서는, 위상 산출부(12)는, 제 1 표면 데이터에 관한 유사도 벡터 S3(t, L1)의 위상 θ3(t, L1)을 산출한다. 유사도 벡터 S3(t, L1)은, 유사도 산출부(11)에 의해 산출된 상관 계수 ρ1(t, L1(P3))과 상관 계수 ρ2(t, L1(P3))을 요소로 하는 벡터이다. 위상 θ3(t, L1)은, 유사도 벡터 S3(t, L1)의 편각이다. 또한, 위상 산출부(12)는, 제 2 표면 데이터에 관한 유사도 벡터 S4(t, L1)의 위상 θ4(t, L1)을 산출한다. 유사도 벡터 S4(t, L1)은, 유사도 산출부(11)에 의해 산출된 상관 계수 ρ1(t, L1(P4))와 상관 계수 ρ2(t, L1(P4))를 요소로 하는 벡터이다. 위상 θ4(t, L1)은, 유사도 벡터 S4(t, L1)의 편각이다.
엘리베이터의 카가 로프(1) 및 로프(21)에 의해 승강로에 매달려 있는 경우, 로프(1)가 이동하는 속도와 로프(21)가 이동하는 속도는 동일하다. 로프(1)의 스트랜드 피치와 로프(21)의 스트랜드 피치가 동일하면, 유사도 벡터 S3(t, L1)과 유사도 벡터 S4(t, L1)이 이루는 각도는, 상기 속도에 상관없이 일정하게 된다. 유사도 벡터 S3(t, L1)과 유사도 벡터 S4(t, L1)이 이루는 각도는, 위상 θ4(t, L1)과 위상 θ3(t, L1)의 차이, 즉 위상차이다.
본 실시의 형태에 나타내는 예에서는, 이상 검출부(14)는, 위상 산출부(12)에 의해 산출된 위상 θ4(t, L1) 및 위상 θ3(t, L1)에 근거하여, 로프(1) 또는 로프(21)에 이상이 발생한 것을 검출한다. 예컨대, 이상 검출부(14)는, 로프(1)의 표면에 형성된 모양 혹은 로프(21)의 표면에 형성된 모양의 주기 이상을 검출한다. 예컨대, 기억부(9)에, 모양의 주기가 정상인 것을 판정하기 위한 기준 범위가 미리 기억된다. 이상 검출부(14)는, 위상 θ4(t, L1)과 위상 θ3(t, L1)의 차이가 상기 기준 범위에 들어가 있으면, 로프(1) 및 로프(21)의 양쪽에 피치 이상이 발생하고 있지 않다고 판정한다. 이상 검출부(14)는, 위상 θ4(t, L1)과 위상 θ3(t, L1)의 차이가 상기 기준 범위에 들어가 있지 않으면, 로프(1) 혹은 로프(21)의 어느 한쪽에 피치 이상이 발생하고 있다고 판정한다.
본 실시의 형태에 나타내는 예이면, 검출 장치는, 복수 개의 긴 물체를 검출 대상으로 할 수 있다. 또한, 본 실시의 형태에 나타내는 예이면, 로프(1) 및 로프(21)의 이동 속도가 변동하고 있는 경우에도, 이상이 발생한 것을 검출할 수 있다.
본 실시의 형태에 나타내는 예에 있어서 제어 장치(3)가 이상 검출부(18)를 더 구비하는 경우, 이상 검출부(18)는, 유사도 벡터 S3(t, L1)의 놈에 근거하여 로프(1)의 모양에 이상이 발생한 것을 검출한다. 예컨대, 이상 검출부(18)는, 유사도 벡터 S3(t, L1)의 놈이 정상 범위로부터 벗어나 있으면, 로프(1)의 모양에 이상이 발생한 것을 검출한다. 또한, 이상 검출부(18)는, 유사도 벡터 S4(t, L1)의 놈에 근거하여 로프(21)의 모양에 이상이 발생한 것을 검출한다. 예컨대, 이상 검출부(18)는, 유사도 벡터 S4(t, L1)의 놈이 정상 범위로부터 벗어나 있으면, 로프(21)의 모양에 이상이 발생한 것을 검출한다.
본 실시의 형태에 나타내는 예에서는, 광원(4)으로부터 조사된 광이 로프(1) 및 로프(21)에 동일한 높이에서 부딪치는 예에 대하여 설명했다. 센서 헤드(2)가 상이한 높이의 표면 데이터를 취득할 수 있으면, 본 실시의 형태에 나타내는 예에 있어서도, 제어 장치(3)는, 주기 산출부(13), 속도 산출부(15) 및 위치 산출부(16)를 더 구비하더라도 좋다.
이러한 경우, 센서 헤드(2)는, 예컨대 광원(4), 광원(5), 수광 소자(6) 및 수광 소자(7)를 구비한다. 광원(4)은, 로프(1)의 표면에 광을 조사한다. 수광 소자(6)는, 광원(4)으로부터 조사된 광 중 로프(1)의 표면에서 반사된 광을 수광한다. 광원(5)은, 로프(21)의 표면에 광을 조사한다. 광원(5)으로부터 조사된 광은, 광원(4)으로부터의 광이 로프(1)에 부딪치는 위치로부터 y축 방향으로 일정 거리만큼 떨어진 위치에서 로프(21)에 부딪친다. 수광 소자(7)는, 광원(5)으로부터 조사된 광 중 로프(21)의 표면에서 반사된 광을 수광한다. 센서 헤드(2)는, 카메라(20)를 구비하더라도 좋다.
또한, 속도 산출부(15)는, 위상 산출부(12)에 의해 산출된 위상 θ(t, L1)과 위상 θ(t, L2)에 근거하여, 로프(1) 및 로프(21)의 이동 속도를 산출한다. 이 예에 있어서, L2는, 광원(5)으로부터의 광이 로프(21)에 부딪치는 높이를 나타낸다. 위치 산출부(16)는, 이상 검출부(14)에 의해 이상이 검출되었을 때의 이동 거리에 근거하여, 검출된 이상의 로프(1) 상의 위치 혹은 로프(21) 상의 위치를 산출한다.
본 실시의 형태에서 개시하지 않는 특징에 대해서는, 실시의 형태 1 또는 2에서 개시된 어느 특징이 채용되더라도 좋다.
실시의 형태 4.
본 검출 장치가 적용 가능한 엘리베이터에는, 카의 속도를 검출하기 위해 조속기가 구비된다. 조속기는, 예컨대 조속 로프, 조속 도르래 및 인코더를 구비한다. 조속 로프는, 조속 도르래에 감겨 있고, 엘리베이터의 카에 연동하여 이동한다. 즉, 카가 이동하면, 조속 로프가 이동한다. 또한, 조속 로프가 이동하면, 조속 도르래가 회전한다. 인코더는, 조속 도르래의 회전 방향 및 회전 각도에 따른 회전 신호를 출력한다. 인코더로부터 출력된 회전 신호는, 카를 제어하기 위해 이용된다.
실시의 형태 1로부터 3에 나타내는 예에서는, 속도 산출부(15)가 로프(1)의 이동 속도 V를 산출한다. 엘리베이터의 카가 로프(1)에 의해 매달려 있으면, 로프(1)의 이동 속도 V는 카의 이동 속도에 일치한다. 이 때문에, 엘리베이터에 있어서, 조속기 대신에 속도 산출부(15)를 이용하여 카의 속도를 검출하더라도 좋다. 이러한 경우, 엘리베이터는 조속기를 구비하고 있지 않더라도 좋다. 또한, 엘리베이터에 있어서, 조속기와 함께 속도 산출부(15)를 이용하여 카의 속도를 검출하더라도 좋다.
조속기에서는, 조속 로프와 조속 도르래의 사이에 발생하는 미끄러짐에 의해 검출 오차가 생길 수 있다. 조속기에서는, 조속 도르래의 마모에 의해 검출 오차가 생길 수 있다. 본 검출 장치이면, 표면 데이터의 취득을 비접촉으로 행할 수 있다. 이 때문에, 카의 속도를 정밀하게 검출할 수 있다. 또한, 조속기를 구비할 필요가 없으면, 엘리베이터의 구성을 간소화할 수 있다.
부호 9~19에 나타내는 각 부는, 제어 장치(3)가 갖는 기능을 나타낸다. 도 22는 제어 장치(3)의 하드웨어 구성의 예를 나타내는 도면이다. 제어 장치(3)는, 하드웨어 자원으로서, 예컨대 프로세서(22)와 메모리(23)를 포함하는 처리 회로를 구비한다. 기억부(9)가 갖는 기능은 메모리(23)에 의해 실현된다. 제어 장치(3)는, 메모리(23)에 기억된 프로그램을 프로세서(22)에 의해 실행하는 것에 의해, 부호 10~19에 나타내는 각 부의 기능을 실현한다.
프로세서(22)는, CPU(Central Processing Unit), 중앙 처리 장치, 처리 장치, 연산 장치, 마이크로프로세서, 마이크로컴퓨터 혹은 DSP라고도 한다. 메모리(23)로서, 반도체 메모리, 자기 디스크, 플렉서블 디스크, 광 디스크, 콤팩트 디스크, 미니 디스크 혹은 DVD를 채용하더라도 좋다. 채용 가능한 반도체 메모리에는, RAM, ROM, 플래시 메모리, EPROM 및 EEPROM 등이 포함된다.
제어 장치(3)가 갖는 각 기능의 일부 또는 전부를 하드웨어에 의해 실현하더라도 좋다. 제어 장치(3)의 기능을 실현하는 하드웨어로서, 단일 회로, 복합 회로, 프로그램화한 프로세서, 병렬 프로그램화한 프로세서, ASIC, FPGA, 또는 이들의 조합을 채용하더라도 좋다.
(산업상 이용가능성)
본 발명과 관련되는 검출 장치는, 표면에 주기적인 모양을 갖는 긴 물체를 검출의 대상으로 하는 장치에 적용할 수 있다.
1 : 로프
2 : 센서 헤드
3 : 제어 장치
4 : 광원
5 : 광원
6 : 수광 소자
7 : 수광 소자
8 : 신호선
9 : 기억부
10 : 데이터 처리부
11 : 유사도 산출부
12 : 위상 산출부
13 : 주기 산출부
14 : 이상 검출부
15 : 속도 산출부
16 : 위치 산출부
17 : 무효부
18 : 이상 검출부
19 : 선택부
20 : 카메라
21 : 로프
22 : 프로세서
23 : 메모리
2 : 센서 헤드
3 : 제어 장치
4 : 광원
5 : 광원
6 : 수광 소자
7 : 수광 소자
8 : 신호선
9 : 기억부
10 : 데이터 처리부
11 : 유사도 산출부
12 : 위상 산출부
13 : 주기 산출부
14 : 이상 검출부
15 : 속도 산출부
16 : 위치 산출부
17 : 무효부
18 : 이상 검출부
19 : 선택부
20 : 카메라
21 : 로프
22 : 프로세서
23 : 메모리
Claims (11)
- 표면에 주기적인 모양을 갖는 긴 물체의 제 1 표면 데이터 및 제 2 표면 데이터를 취득하는 데이터 취득 수단과,
제 1 레퍼런스 데이터 및 제 2 레퍼런스 데이터를 기억하는 기억 수단과,
상기 데이터 취득 수단에 의해 취득된 제 1 표면 데이터와 상기 제 1 레퍼런스 데이터의 제 1 유사도, 상기 데이터 취득 수단에 의해 취득된 제 1 표면 데이터와 상기 제 2 레퍼런스 데이터의 제 2 유사도, 상기 데이터 취득 수단에 의해 취득된 제 2 표면 데이터와 상기 제 1 레퍼런스 데이터의 제 3 유사도, 및 상기 데이터 취득 수단에 의해 취득된 제 2 표면 데이터와 상기 제 2 레퍼런스 데이터의 제 4 유사도를 산출하는 유사도 산출 수단과,
상기 유사도 산출 수단에 의해 산출된 제 1 유사도 및 제 2 유사도를 요소로 하는 제 1 유사도 벡터의 편각을 제 1 위상으로서 산출하고, 상기 유사도 산출 수단에 의해 산출된 제 3 유사도 및 제 4 유사도를 요소로 하는 제 2 유사도 벡터의 편각을 제 2 위상으로서 산출하는 위상 산출 수단과,
상기 위상 산출 수단에 의해 산출된 제 1 위상 및 제 2 위상에 근거하여, 상기 긴 물체에 형성된 모양의 주기를 산출하는 주기 산출 수단과,
상기 주기 산출 수단에 의해 산출된 주기에 근거하여, 상기 긴 물체의 이상을 검출하는 제 1 이상 검출 수단
을 구비한 검출 장치.
- 표면에 주기적인 모양을 갖는 긴 물체의 복수의 표면 데이터를 취득하는 데이터 취득 수단과,
제 1 레퍼런스 데이터 및 제 2 레퍼런스 데이터를 기억하는 기억 수단과,
상기 데이터 취득 수단에 의해 취득된 표면 데이터 중에서 제 1 표면 데이터 및 제 2 표면 데이터를 선택하는 선택 수단과,
상기 선택 수단에 의해 선택된 제 1 표면 데이터와 상기 제 1 레퍼런스 데이터의 제 1 유사도, 상기 선택 수단에 의해 선택된 제 1 표면 데이터와 상기 제 2 레퍼런스 데이터의 제 2 유사도, 상기 선택 수단에 의해 선택된 제 2 표면 데이터와 상기 제 1 레퍼런스 데이터의 제 3 유사도, 및 상기 선택 수단에 의해 선택된 제 2 표면 데이터와 상기 제 2 레퍼런스 데이터의 제 4 유사도를 산출하는 유사도 산출 수단과,
상기 유사도 산출 수단에 의해 산출된 제 1 유사도 및 제 2 유사도를 요소로 하는 제 1 유사도 벡터의 편각을 제 1 위상으로서 산출하고, 상기 유사도 산출 수단에 의해 산출된 제 3 유사도 및 제 4 유사도를 요소로 하는 제 2 유사도 벡터의 편각을 제 2 위상으로서 산출하는 위상 산출 수단과,
상기 위상 산출 수단에 의해 산출된 제 1 위상 및 제 2 위상에 근거하여, 상기 긴 물체에 형성된 모양의 주기를 산출하는 주기 산출 수단과,
상기 주기 산출 수단에 의해 산출된 주기에 근거하여, 상기 긴 물체의 이상을 검출하는 제 1 이상 검출 수단
을 구비한 검출 장치.
- 제 2 항에 있어서,
상기 선택 수단은, 상기 데이터 취득 수단에 의해 취득된 표면 데이터 중, 상기 제 1 레퍼런스 데이터와의 유사도 및 상기 제 2 레퍼런스 데이터와의 유사도를 요소로 하는 유사도 벡터의 놈(norm)이 가장 큰 것과 2번째로 큰 것을 제 1 표면 데이터 및 제 2 표면 데이터로서 선택하는 검출 장치.
- 제 2 항에 있어서,
상기 선택 수단은, 상기 데이터 취득 수단에 의해 취득된 표면 데이터 중, 상기 제 1 레퍼런스 데이터와의 유사도 및 상기 제 2 레퍼런스 데이터와의 유사도를 요소로 하는 유사도 벡터의 놈이 기준치 이상인 것 중에서, 이루는 각도가 최대가 되는 2개의 것을 제 1 표면 데이터 및 제 2 표면 데이터로서 선택하는 검출 장치.
- 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
상기 위상 산출 수단에 의해 산출된 제 1 위상 및 제 2 위상에 근거하여, 상기 긴 물체의 속도를 산출하는 속도 산출 수단과,
상기 속도 산출 수단에 의해 산출된 속도에 근거하여, 상기 제 1 이상 검출 수단에 의해 검출된 이상의 상기 긴 물체 상에서의 위치를 산출하는 위치 산출 수단
을 더 구비한 검출 장치.
- 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
상기 유사도 산출 수단에 의해 산출된 제 1 유사도 및 제 2 유사도를 요소로 하는 제 1 유사도 벡터의 놈 또는 상기 유사도 산출 수단에 의해 산출된 제 3 유사도 및 제 4 유사도를 요소로 하는 제 2 유사도 벡터의 놈의 적어도 어느 한쪽에 근거하여, 상기 긴 물체의 모양에 이상이 발생한 것을 검출하는 제 2 이상 검출 수단을 더 구비한 검출 장치.
- 제 1 항 내지 제 6 항 중 어느 한 항에 있어서,
상기 데이터 취득 수단은,
상기 긴 물체에 광을 조사하는 제 1 광원과,
상기 제 1 광원으로부터의 광의 파장과는 상이한 파장의 광을 상기 긴 물체에 조사하는 제 2 광원과,
상기 긴 물체에서 반사된 상기 제 1 광원으로부터의 광 및 상기 긴 물체에서 반사된 상기 제 2 광원으로부터의 광을 받는 수광 소자
를 구비한
검출 장치.
- 표면에 주기적인 모양을 갖는 제 1 긴 물체의 제 1 표면 데이터 및 상기 제 1 긴 물체의 표면에 형성된 모양과 동일한 모양을 표면에 갖는 제 2 긴 물체의 제 2 표면 데이터를 취득하는 데이터 취득 수단과,
제 1 레퍼런스 데이터 및 제 2 레퍼런스 데이터를 기억하는 기억 수단과,
상기 데이터 취득 수단에 의해 취득된 제 1 표면 데이터와 상기 제 1 레퍼런스 데이터의 제 1 유사도, 상기 데이터 취득 수단에 의해 취득된 제 1 표면 데이터와 상기 제 2 레퍼런스 데이터의 제 2 유사도, 상기 데이터 취득 수단에 의해 취득된 제 2 표면 데이터와 상기 제 1 레퍼런스 데이터의 제 3 유사도, 및 상기 데이터 취득 수단에 의해 취득된 제 2 표면 데이터와 상기 제 2 레퍼런스 데이터의 제 4 유사도를 산출하는 유사도 산출 수단과,
상기 유사도 산출 수단에 의해 산출된 제 1 유사도 및 제 2 유사도를 요소로 하는 제 1 유사도 벡터의 편각을 제 1 위상으로서 산출하고, 상기 유사도 산출 수단에 의해 산출된 제 3 유사도 및 제 4 유사도를 요소로 하는 제 2 유사도 벡터의 편각을 제 2 위상으로서 산출하는 위상 산출 수단과,
상기 위상 산출 수단에 의해 산출된 제 1 위상 및 제 2 위상에 근거하여, 상기 제 1 긴 물체 또는 상기 제 2 긴 물체에 이상이 발생한 것을 검출하는 제 1 이상 검출 수단
을 구비한 검출 장치.
- 제 8 항에 있어서,
상기 유사도 산출 수단에 의해 산출된 제 1 유사도 및 제 2 유사도를 요소로 하는 제 1 유사도 벡터의 놈에 근거하여 상기 제 1 긴 물체의 모양에 이상이 발생한 것을 검출하고, 상기 유사도 산출 수단에 의해 산출된 제 3 유사도 및 제 4 유사도를 요소로 하는 제 2 유사도 벡터의 놈에 근거하여 상기 제 2 긴 물체의 모양에 이상이 발생한 것을 검출하는 제 2 이상 검출 수단을 더 구비한 검출 장치.
- 제 8 항 또는 제 9 항에 있어서,
상기 데이터 취득 수단은,
상기 제 1 긴 물체 및 상기 제 2 긴 물체에 광을 조사하는 광원과,
상기 제 1 긴 물체에서 반사된 상기 광원으로부터의 광 및 상기 제 2 긴 물체에서 반사된 상기 광원으로부터의 광을 받는 수광 소자
를 구비한
검출 장치.
- 제 1 항 내지 제 10 항 중 어느 한 항에 있어서,
상기 유사도 산출 수단에 의해 산출된 제 1 유사도 및 제 2 유사도를 요소로 하는 제 1 유사도 벡터의 놈 또는 상기 유사도 산출 수단에 의해 산출된 제 3 유사도 및 제 4 유사도를 요소로 하는 제 2 유사도 벡터의 놈의 적어도 어느 한쪽에 근거하여, 상기 제 1 이상 검출 수단에 의한 이상 검출을 무효로 하는 무효 수단을 더 구비한 검출 장치.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/004225 WO2018142613A1 (ja) | 2017-02-06 | 2017-02-06 | 検出装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20190104184A true KR20190104184A (ko) | 2019-09-06 |
Family
ID=63039448
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197022529A KR20190104184A (ko) | 2017-02-06 | 2017-02-06 | 검출 장치 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11099138B2 (ko) |
| JP (1) | JP6590088B2 (ko) |
| KR (1) | KR20190104184A (ko) |
| CN (1) | CN110226075A (ko) |
| DE (1) | DE112017006997T5 (ko) |
| WO (1) | WO2018142613A1 (ko) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7134793B2 (ja) * | 2018-08-29 | 2022-09-12 | オーチス エレベータ カンパニー | エレベータロープ伸び計測装置及びエレベータロープ伸び計測方法 |
| CN109341538A (zh) * | 2018-10-17 | 2019-02-15 | 太原科技大学 | 一种测量轴承偏移量的测量方法 |
| JP7318395B2 (ja) * | 2019-07-30 | 2023-08-01 | 株式会社明電舎 | エレベータ用ワイヤロープの速度検出装置、エレベータ用ワイヤロープの速度検出方法 |
| WO2024171431A1 (ja) * | 2023-02-17 | 2024-08-22 | 三菱電機株式会社 | 情報処理装置、検出方法、及び検出プログラム |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011108173A1 (ja) | 2010-03-03 | 2011-09-09 | 三菱電機株式会社 | ロープ検査装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3641816A1 (de) * | 1986-12-06 | 1988-06-16 | Robert Prof Dr Ing Massen | Verfahren und anordnung zur messung und/oder ueberwachung von eigenschaften von garnen und seilen |
| KR20050005335A (ko) * | 2003-07-01 | 2005-01-13 | 엘지전선 주식회사 | 꼬인 케이블의 피치를 측정하기 위한 방법 및 장치 |
| TWI278598B (en) * | 2004-12-22 | 2007-04-11 | Univ Electro Communications | 3D shape measurement device |
| JP4803323B2 (ja) * | 2010-02-25 | 2011-10-26 | Jfeスチール株式会社 | ワイヤロープピッチの測定方法とワイヤロープピッチ測定装置およびワイヤロープの製造方法 |
| JP2012127675A (ja) * | 2010-12-13 | 2012-07-05 | Asahi Glass Co Ltd | 表面形状の評価方法および評価装置 |
| CN103429985B (zh) * | 2011-01-19 | 2016-10-19 | 诺威量测设备股份有限公司 | 用于光学测量具有通孔的图案化结构的方法 |
| FR3016699B1 (fr) * | 2014-01-22 | 2016-02-12 | Msc & Sgcc | Procede et dispositif pour la detection notamment de defauts refractants |
| JP6365765B2 (ja) * | 2015-03-27 | 2018-08-01 | 三菱電機株式会社 | 検出装置 |
-
2017
- 2017-02-06 KR KR1020197022529A patent/KR20190104184A/ko active IP Right Grant
- 2017-02-06 DE DE112017006997.1T patent/DE112017006997T5/de active Pending
- 2017-02-06 JP JP2018565223A patent/JP6590088B2/ja active Active
- 2017-02-06 CN CN201780084710.9A patent/CN110226075A/zh not_active Withdrawn
- 2017-02-06 US US16/463,852 patent/US11099138B2/en active Active
- 2017-02-06 WO PCT/JP2017/004225 patent/WO2018142613A1/ja active Application Filing
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011108173A1 (ja) | 2010-03-03 | 2011-09-09 | 三菱電機株式会社 | ロープ検査装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112017006997T5 (de) | 2019-10-17 |
| US11099138B2 (en) | 2021-08-24 |
| WO2018142613A1 (ja) | 2018-08-09 |
| JPWO2018142613A1 (ja) | 2019-11-07 |
| US20190345648A1 (en) | 2019-11-14 |
| CN110226075A (zh) | 2019-09-10 |
| JP6590088B2 (ja) | 2019-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20190104184A (ko) | 검출 장치 | |
| US9068821B2 (en) | Optical measuring device with positional displacement detection | |
| JP6333403B2 (ja) | ロープ径計測システム、ロープ径計測装置、ロープ径計測方法およびプログラム | |
| JP6382303B2 (ja) | 表面粗さ測定装置 | |
| US10684120B2 (en) | Wire rope measuring device and wire rope measuring method | |
| TWI783990B (zh) | 用於偵測饋送至操作機器的織物或金屬線的特性之方法、系統及感測器 | |
| US9151962B2 (en) | Position detector and autofocus control apparatus using focal point deviation detector | |
| JP6013088B2 (ja) | 中心位置検出装置、プログラム、記録媒体、及び方法 | |
| CN106461381A (zh) | 用于测定两个平坦的工件表面之间的夹角的设备 | |
| KR101936009B1 (ko) | 검출 장치 | |
| US20140132600A1 (en) | Three-dimensional model generating device | |
| KR102618682B1 (ko) | 로프의 파라미터를 측정하기 위한 장치 | |
| JP2008145175A (ja) | ケーブルの素線の配列周期把握方法、及びケーブルの形状状態測定方法、これに用いるケーブルの形状状態測定システム、ケーブルの形状状態測定プログラム | |
| KR101833396B1 (ko) | 프레넬 회절 보더 프로파일들을 평가하여 오브젝트의 적어도 하나의 에지의 포지션을 결정하는 방법 | |
| US7227641B2 (en) | Method and apparatus for measuring a pitch of stranded cable | |
| JP2016138771A (ja) | 一次元輝度分布検知装置 | |
| Suliga | A feature analysis of a laser triangulation stand used to acquire a3D screw thread image | |
| JP6443747B2 (ja) | 計測データ処理装置と方法 | |
| JP6170714B2 (ja) | 測距装置 | |
| WO2016157289A1 (ja) | 検出装置 | |
| JP2006112964A (ja) | 光学センサ装置 | |
| JP3511474B2 (ja) | 2次元走査型レンジセンサ投光器走査方法及びシステム装置並びに2次元走査型レンジセンサ投光器走査プログラムを記録したコンピュータで読取り可能な記録媒体 | |
| US11567203B2 (en) | Light line triangulation apparatus | |
| EP4343297A1 (en) | Cable tensiometer | |
| US20220148210A1 (en) | Computer-implemented method for ascertaining a value of a geometric parameter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right |