KR20170097040A - 리세스형 헤드 체결구 및 드라이버 결합체 - Google Patents
리세스형 헤드 체결구 및 드라이버 결합체 Download PDFInfo
- Publication number
- KR20170097040A KR20170097040A KR1020177016552A KR20177016552A KR20170097040A KR 20170097040 A KR20170097040 A KR 20170097040A KR 1020177016552 A KR1020177016552 A KR 1020177016552A KR 20177016552 A KR20177016552 A KR 20177016552A KR 20170097040 A KR20170097040 A KR 20170097040A
- Authority
- KR
- South Korea
- Prior art keywords
- fastener
- head
- recess
- cone
- frustum
- Prior art date
Links
- 230000000694 effects Effects 0.000 claims description 6
- 230000037431 insertion Effects 0.000 claims 1
- 238000003780 insertion Methods 0.000 claims 1
- 238000004519 manufacturing process Methods 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000002411 adverse Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000033001 locomotion Effects 0.000 description 2
- 230000013011 mating Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 1
- 238000010420 art technique Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000003908 quality control method Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000009987 spinning Methods 0.000 description 1
Images









Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16B—DEVICES FOR FASTENING OR SECURING CONSTRUCTIONAL ELEMENTS OR MACHINE PARTS TOGETHER, e.g. NAILS, BOLTS, CIRCLIPS, CLAMPS, CLIPS OR WEDGES; JOINTS OR JOINTING
- F16B23/00—Specially shaped nuts or heads of bolts or screws for rotations by a tool
- F16B23/0007—Specially shaped nuts or heads of bolts or screws for rotations by a tool characterised by the shape of the recess or the protrusion engaging the tool
- F16B23/0023—Specially shaped nuts or heads of bolts or screws for rotations by a tool characterised by the shape of the recess or the protrusion engaging the tool substantially cross-shaped
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B15/00—Screwdrivers
- B25B15/001—Screwdrivers characterised by material or shape of the tool bit
- B25B15/004—Screwdrivers characterised by material or shape of the tool bit characterised by cross-section
- B25B15/005—Screwdrivers characterised by material or shape of the tool bit characterised by cross-section with cross- or star-shaped cross-section
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16B—DEVICES FOR FASTENING OR SECURING CONSTRUCTIONAL ELEMENTS OR MACHINE PARTS TOGETHER, e.g. NAILS, BOLTS, CIRCLIPS, CLAMPS, CLIPS OR WEDGES; JOINTS OR JOINTING
- F16B23/00—Specially shaped nuts or heads of bolts or screws for rotations by a tool
- F16B23/0007—Specially shaped nuts or heads of bolts or screws for rotations by a tool characterised by the shape of the recess or the protrusion engaging the tool
- F16B23/003—Specially shaped nuts or heads of bolts or screws for rotations by a tool characterised by the shape of the recess or the protrusion engaging the tool star-shaped or multi-lobular, e.g. Torx-type, twelve-point star
Abstract
타원형인 드라이버/리세스 접촉 면을 제공하기 위한 상이한 원뿔의 다양한 절두체의 사용을 포함하는 나사 리세스 및 드라이버 결합체가 제공된다.
Description
관련 출원
본원은 내용이 본 명세서에 참조로 포함되는, 2014년 12월 17일자로 출원된, 미국 임시 출원 제62/093,236호의 이익을 주장한다.
종래 기술은 십자형 스타일 리세스 구동 시스템을 갖는 이익을 인정한다. 다양한 대안을 기술하는 예시적인 허여 특허는,
필립스(Phillips) 등의 발명의 명칭이 SCREW인, 미국 특허 제2,046,839호(널리 공지된 필립스 헤드 나사에 관련됨),
피파드(Phippard)의 발명의 명칭이 RECESSED HEAD FASTENER인, 미국 특허 제2,592,462호**,
지케이엔 스크루즈 앤드 패스너즈, 엘티디.(GKN screws and fasteners, Ltd.)의 발명의 명칭이 IMPROVEMENTS IN OR RELATING TO SCREW THREADED FASTENERS AND DRIVERS FOR USE THEREWITH인, 영국 특허 제1,006,509호(소위 포지드리브(POZIDRIV) 리세스),
지케이엔 패스너즈, 엘티디.의 발명의 명칭이 THREADED FASTENER인, 영국 특허 제1,521,141호(소위 수파리브(SUPARIV) 리세스), 및
질(Gill)의 발명의 명칭이 FASTENER AND DRIVER COMBINATION인, 미국 특허 제4,464,957호**
를 포함한다.
이들 나열된 특허의 각각은 나사가 구동되어 조립을 수행할 때의 드라이버/리세스 분리의 불리한 영향을 최소화할 필요성의 이해를, 그것의 고유한 방식으로, 제공한다. 본 기술분야의 통상의 기술자에 의해 이해되는 바와 같이, 이러한 현상은 용어 '캠-아웃(cam-out)'에 의해 알려져 있다.
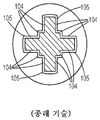
십자형 시스템 그리고 관련하여, 나사를 구동하는 수단으로서 방사상 홈이 제공되는, 3-날개 시스템은 드라이버의 외측 원뿔 각도와 리세스 날개의 원뿔 각도 사이의 변화를 제공할 필요성을 갖고, 종래 기술의 도 1에 보이는 바와 같이 드라이버 원뿔 각도(6)는 리세스 원뿔 각도(5)보다 커야 하고 드라이버 접촉이 구동 시스템의 상부, 외측 면/모서리(7)에서 일어나게 하여야 한다는 것이 추가로 인정된다. 이것은 나사를 구동하는 최상 허용가능 접촉을 제공하는 것으로 평가되고, 캠-아웃을 최소화하는 것을 도울 것이고, '스피닝(spinning)'으로서 알려져 있는 현상으로부터 리세스에 일어날 수 있는 손상의 영향을 추가로 감소시킬 것이다. 십자형 구동 시스템은 종래 기술의 도 2에 도시된 바와 같이 드라이버와 리세스 사이의 결합이 일어나는 리세스 날개와 드라이버 날개 사이의 간극에 대한 필요성을 추가로 인정한다. 이들 간극은 구동 토크가 가해질 때, 간극(104)이 드라이버와 리세스 사이의, 상대 이동을 허용하고, 그에 의해 힘이 단지 지점(105)을 통해 가해질 것을 시사한다.
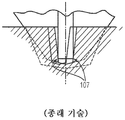
추가로, 별표(**)로 표시되는 특허는 조립체에 대한, 나사의 배치가 더 용이해지도록 리세스와 드라이버 사이의, 기계적인 부착의 형태에 대한 필요성을 인정한다. 이것은 종래 기술의 도 3에 예시된 바와 같이 드라이버 및 리세스가 초기에 결합될 때에 '웨징(wedging)' 작용에 의해 성취된다. 이러한 웨징 작용은 리세스의 저부(107)에서 일어나는 것으로 고려되고, 캠-아웃에 저항하는 것을 돕는 것으로 또한 평가된다.
질에 따르면, 영국 특허 제1,521,141호에서, 리세스 및 드라이버 날개들 사이의 간극은 날개들 중 하나가 나사 축과 평행하도록 더 근접하게 접근하는 드라이버 원뿔 각도를 갖고, 캠-아웃을 최소화하는 점에서 상기 시스템을 추가로 향상시키도록 드라이버의 축 및 리세스의 축이 오정렬되게 함으로써 수행하는 데 사용된다.
본 발명은 종래-기술의 인용된 특허에 의해 제안되는 속성이 드라이버 및 리세스 둘 모두의 실질적으로 정합하는 구성을 갖는 나사 리세스 및 드라이버의 결합체에 의해, 효과적으로, 나사가 구동될 수 있게 하는 독창적인 기술을 여전히 제공한다는 것을 인정한다. 드라이버/리세스 결합체의 진보를 제공하는 본 발명의 독창적인 특성이 3(3개)-날개 시스템을 사용하여 고려될 것이다. 그러나, 중심 코어로부터 방사하는 3(3개)-날개를 가짐으로써, 사용되는 방법론은 2(2개) 방사상 날개 또는 4(4개) 방사상 날개를 갖는 시스템에 적용가능하다. 이들 변화 중 어느 하나가 고려되면, 2(2개) 날개 시스템은 계란형 중심 코어를 요구할 것이고, 4(4개) 날개 시스템은 4(4개) 로브형(lobed) 중심 코어를 요구할 것이라는 것이 인정된다. 날개의 말단부 그리고 나사 및 드라이버를 안정화하는 보조구로서 사용되는 원뿔의 절두체는 도 5, 6, 7 및 9에 도시된 바와 같은 크기 내에서 포함될 것이고, 그것들을 참조하여 아래에서 논의될 것이다.
본 발명의 예시적인 실시예는 본 명세서에서 나사로서 형성되고 나사의 헤드 내에 리세스를 갖는 체결구 그리고 나사를 구동하여 조립을 수행할 목적을 위해 회전이 나사에 가해지게 하는 방식으로 상기 리세스와 결합하는 드라이버에 관한 것이다. 본 명세서에 사용되는 바와 같이, 조립은 2개 이상의 구성요소 부분을 함께 접합하는 것이다. 본 발명의 예시적인 실시예에 따른, 드라이버는 나사의 헤드 내의 본 발명의 독창적인 형태의 내부 리세스와 실질적으로 정합하는 외부 형태를 갖는 드라이버이다.
리세스 및 드라이버의 형태의 본 발명의 독창적인 특성은 다양한 헤드 스타일 및 나사 크기를 수용하는 다수의 리세스 깊이에서 하나의 드라이버가 사용되게 한다. 다양한 헤드 스타일 및 나사 크기는 하나의 크기의 드라이버에 의해 구동된다는 점에서 비제한적이지 않고, 모든 크기의 나사 및 모든 헤드 스타일을 구동할 필요성을 충족시키도록 생성되는 가변 크기의, 제한된 개수의 드라이버에 대한 필요성이 있을 것이라는 것이 인정된다.
본 발명에 따르면, 나사산형 부분(11) 그리고 구동 리세스(13)를 포함하는 헤드(12)를 포함하는 나사(10)가 제공된다(도 4). 종래의 방식으로 나사를 조립하는 데 필요한 회전 운동 및 토크를 제공할 목적을 위해 리세스와 결합하는 정합 구성의 드라이버가 있다(도 4a). 리세스 및 드라이버는 각각, 나사의 중심 공동 및 드라이버의 중심 코어로부터 연장하는 동일한 개수의 방사상 홈을 포함한다. 홈들은 199와 같이 120°(도)로 균등하게 이격된다(도 5).
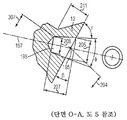
나사 헤드의 상부 표면(14)에는, 리세스 공동 날개(301)의 말단부를 포함하는 외접원(203)이 있다(도 9). 각각의 공동 날개는 각도 α로 절단되는 원뿔(198)의 사용에 의해 생성된다. 그 결과의 원뿔의 절두체는 이어서 그것이 깊이(207)에 대해 각도 90-β로 삽입되는 나사의 헤드 내에 재현된다(도 6). 선택되는 원뿔 각도(Φ)는 날개의 구성을 위해, 바람직하게는 8°(도)이다.
이러한 구성을 사용함으로써, 공동 날개의 각각은 타원형으로서 보일 것이고(도 5, 196), 각각의 타원의 크기는 리세스의 깊이가 증가함에 따라 작아질 것이다. 별개의 특징으로서, 종래의 헤드형성 공정에 의해 이러한 날개 구성을 생성하는 것 그리고 이처럼 지금까지 언급된 형태의 리세스 내로, 정합 구성의, 드라이버를 삽입하는 것은 가능하지 않다는 것이 인정된다.
본 발명의 혁신적인 리세스 코어의 추가는 위에 언급된 문제의 둘 모두를 없애고, α의 효과적인 특성을 추가한다(도 5). 각도(α)의 생성은 도 7a와 관련하여 아래에서 분석 및 제공된다.
원뿔의 중심 절두체의 높이(302)는 아래에서 상세하게, 재차, 논의될 것이다. 이러한 단계에서는, 진입 직경(204), 원뿔의 각도(α) 및 원뿔의 중심 절두체의 높이(305)의 사용에 의해, 리세스의 중심, 로브형, 공동의 내접원(306)에 관련되는 물리적인 치수를 결정하는 것으로서 본 발명의 혁신기술을 제공하는 것으로 충분하다. 이러한 로브형 공동에 대한, 외접원(307)은 비틀림 모멘트, 즉, 토크가 가해질 때에 나사 및 헤드의 강도로부터 벗어나지 않을 한계들 사이에 있는 것으로 생각된다.
로브들의 상대 각도 위치는 날개의 중심에 관련될 때에, 날개의 각각의 가상 방사상 중심과 일치하는, 외접 직경(307)의, 로브를 갖는 각도 위치이다.
본 발명의 예시적인 실시예가 예로서 그리고 동일한 도면 부호가 동일하거나 실질적으로 동일한 특징부를 지시하는, 첨부 도면을 참조하여 이제부터 기술될 것이다.
도 1은 드라이버/리세스 원뿔 각도의 변화에 의해 종래 기술의 조건이 충족되는 사용을 도시하는 종래 기술의 조건의 단면도이다.
도 2는 가해진 토크가 리세스의 상부 표면과 드라이버 날개 말단부의 모서리 사이에 전달되는, 지점에서, 리세스 및 드라이버의 방사상 날개들 사이의 간극이 접촉 상태를 생성할 수 있는 사용을 도시하는 종래 기술의 조건의 평면도이다.
도 3은 드라이버와 리세스 사이의, '웨징'이 일어나는 지점을 지시하는 종래 기술의 리세스를 통한 단면도이다.
도 4는 본 발명의 예시적인 실시예에 따른 리세스를 포함하는 나사의 개략도이다.
도 4a는 리세스에 대한 결합 구성을 갖는 드라이버의 개략도이다.
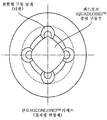
도 5는 본 발명의 예시적인 실시예에 따른, 나사 헤드 및 리세스를 도시하는, 평면도이다.
도 6은 본 발명의 예시적인 실시예에 따른, 형상 구성을 도시하는 리세스 날개를 통한 단면도.
도 7 및 7a는 리세스 외측 원뿔 각도의 생성을 도시한다.
도 8은 원뿔의 중심 절두체 및 로브형 내측 코어를 강조하는, 리세스의, 단면도이다.
도 9는 타원형 방사상 날개, 리세스의 테이퍼링된, 원뿔형 중심 상부 단부 및 리세스의 로브형 중심 내측 코어의 결합을 도시하는, 나사의 헤드의, 평면도이다.
도 10은 기계적인 부착이 리세스와 드라이버 사이에서 일어나는 위치를 도시하는, 나사의 헤드를 통한, 부분 단면도이다.
도 11은 방사상 연장 날개가 십자형으로 되어 있고, 중심 코어가 로브형, 정사각형 단면으로 되어 있는, 나사의 헤드의 평면도이다.
도 1은 드라이버/리세스 원뿔 각도의 변화에 의해 종래 기술의 조건이 충족되는 사용을 도시하는 종래 기술의 조건의 단면도이다.
도 2는 가해진 토크가 리세스의 상부 표면과 드라이버 날개 말단부의 모서리 사이에 전달되는, 지점에서, 리세스 및 드라이버의 방사상 날개들 사이의 간극이 접촉 상태를 생성할 수 있는 사용을 도시하는 종래 기술의 조건의 평면도이다.
도 3은 드라이버와 리세스 사이의, '웨징'이 일어나는 지점을 지시하는 종래 기술의 리세스를 통한 단면도이다.
도 4는 본 발명의 예시적인 실시예에 따른 리세스를 포함하는 나사의 개략도이다.
도 4a는 리세스에 대한 결합 구성을 갖는 드라이버의 개략도이다.
도 5는 본 발명의 예시적인 실시예에 따른, 나사 헤드 및 리세스를 도시하는, 평면도이다.
도 6은 본 발명의 예시적인 실시예에 따른, 형상 구성을 도시하는 리세스 날개를 통한 단면도.
도 7 및 7a는 리세스 외측 원뿔 각도의 생성을 도시한다.
도 8은 원뿔의 중심 절두체 및 로브형 내측 코어를 강조하는, 리세스의, 단면도이다.
도 9는 타원형 방사상 날개, 리세스의 테이퍼링된, 원뿔형 중심 상부 단부 및 리세스의 로브형 중심 내측 코어의 결합을 도시하는, 나사의 헤드의, 평면도이다.
도 10은 기계적인 부착이 리세스와 드라이버 사이에서 일어나는 위치를 도시하는, 나사의 헤드를 통한, 부분 단면도이다.
도 11은 방사상 연장 날개가 십자형으로 되어 있고, 중심 코어가 로브형, 정사각형 단면으로 되어 있는, 나사의 헤드의 평면도이다.
본 발명의 예시적인 실시예를 구성하는 특징들의 결합을 기술할 목적을 위해, 제한된 개수의 나사 크기에 적합한 시스템이 선택된다. 예시적인 목적만을 위해, 일반적으로 공지되고 '메트릭 플랫(metric flat) 헤드 나사'와 관련되는 헤드 스타일이 사용된다는 점이 추가로 제한된다. 다른 나사 크기 및 헤드 스타일은 본 발명의 혁신적인 특성으로부터 배제되지 않고, 설계의 원리는 리세스 구동 시스템을 포함하고, 본 발명의 혁신기술로부터 이익을 얻을 수 있는, 모든 나사 크기 및 헤드 스타일에 적합한 것으로서 간주되어야 한다.
따라서, 크기 범위 및 헤드 스타일은 예시의 목적을 위해, M3.5와 M5 사이의 크기 범위로서 그리고 ASME. B18.6.7M-1998에서 정의된 바와 같이, 90 도 접시형 헤드를 갖는, '플랫 헤드'의 헤드 스타일인 헤드 스타일로서 선택되었다. 이러한 범위는 식별 목적을 위해, #2로 지정된, 동일한 드라이버를 사용하는 리세스 깊이를 포함한다.
본 발명을 위한 구성 이외의 구성의 드라이버가 본 발명의 리세스에서의 사용에 대해 최상 효과를 성취하는 데 사용될 수 있다는 것을 의도하지 않는다.
도 4를 이제부터 참조하면, 나사산형 생크(11)를 갖는 나사(10)가 도시된다. 생크 상의 나사산은 예시적으로 중심 코어 주위에서 나선형 형태로 되어 있다. 나사산의 형태는 임의의 공지된 설계로 되어 있을 수 있거나 나사의, 회전을 요구하는 특별한 설계로 되어 있을 수 있고, 그에 의해 조립을 수행한다. 나사의 헤드(12)는 본 발명의 실시예의 형태의 내부 구동 리세스를 포함하고, 리세스는 예측된 방식으로 나사 나사산이 동작할 수 있게 하는 회전 운동을 리세스(13)의 형태와 대응하는 형태의 드라이버(9)(도 4a)가 제공할 수 있게 하는 공동을 제공하도록 설계된다.
3개의 방사상 날개(301)(도 9)가 원뿔의 절두체로 형성되는, 헤드의 상부 외측 표면(14)에서의 중심 공동(302)(도 8 및 도 9)과 결합하고, 중심 로브형 코어(303)(도 8 및 도 9)와 추가로 결합하는, 방식을 보여주는 본 발명의 혁신적인 리세스가 이제부터 상세하게 기술될 것이고, 그에 의해 나사 리세스 및 드라이버 시스템을 위한 신규한 혁신적인 방법을 생성한다. 신규한 날개의 생성은 드라이버와 리세스 사이의 간섭(interference) 영역(210)(도 5)을, 자체적으로, 생성할 것이다.
도 8 및 도 9를 참조하여, 리세스의 중심 코어가 이러한 불리한 상태를 제거하는 데 그리고 나사의 조립을 위한 공구로서의 결합된 리세스 및 드라이버의 기능을 추가로 향상시키는 데 사용되는 방식이 결정될 것이다. 중심 공동(302)의 절두체는 경사형 날개 원뿔의 중심이 나사 헤드의 표면과 만나는 위치(195)로부터 생성되는 크기를 갖는 큰 직경(204)을 갖는다(도 6). 원뿔의 각도(α)는 리세스 날개의 원뿔 각도에 대해 생성되는 각도이다(도 6).
원뿔형 중심의 깊이(305)는 #2 리세스 및 드라이버 시스템을 이용하는 최대 직경 헤드 그리고 #2 리세스 및 드라이버 시스템을 이용하는 최소 직경 헤드의 높이 차이를 기초로 하여 계산된다. 도 7 (202) 참조. 실용적인 관점에서, 원뿔의 실제 높이(305)는 1.25X202에 대해 계산된 수치 정도일 것이다. 202에 대한 계산 수치에 비교한 이러한 305에서의 증가를 갖는 목적은 원뿔형 중심이 모든 크기의 나사 및 헤드 스타일에 대해 보이는 것을 보증하는 것이다.
공식
원뿔 내경(306)=203-(2(305/tan α))
로부터 원뿔 높이(305)에서의 원뿔의 내경(306)을 결정하면,
로브형 내측 코어에 대한 내접 치수=306을 설정할 수 있다.
로브형 코어에 대한 외접원(307)은 원뿔 날개의 지점의 내측 원뿔과 대응하는 외접원이다(도 6에 도시된 바와 같은 307을 또한 참조). 그러나, 로브형 코어에 대한, 이러한 외접 치수가 10 내지 12%만큼 증가되면 이익인 것으로 생각된다. 이것은 로브형 코어의 비틀림 드라이버 강도를 개선할 것이고, 나사의 조립 중에 전달되는 힘들의 더 효과적인 분포를 제공할 것이다. 밑면 꼭짓점(base apex)(309)에서의 로브형 코어의 깊이(308)는 (예시적인 실시예에 대해 선택될 때의 M3.5 나사에 대한) 최소 헤드 직경이 헤드와 나사 생크 사이의 접합부와 만나는 곳(예컨대, 도 8에 도시된 바와 같은, 311 참조)보다 깊지 않도록 제어된다. 코어 깊이 꼭짓점의 각도(310)는 120°인 것으로서 언급되지만, 제조 조건을 충족시키도록 변화할 수 있다.
본 발명의 추가의 예시적인 실시예가 도 10을 참조하여 도시된다. 중심 원뿔 각도(α)의 수치들 사이의 차이가 제어된다. 리세스 각도는 α+0+1°의 한계 내에서 제어되고, 드라이버 원뿔 각도=α+0-1°이다. 이것은 지점(312)에서의, 드라이버와 리세스 사이의, 기계적인 부착의 작은 특징을 제공할 것이다(도 10). 예시적으로, 이것은 나사가 그것의 리세스에 의해, 드라이버에, '달라붙게(cling)' 할 것이다.
이러한 제한은 드라이버의, 날개 원뿔이 리세스의 날개 원뿔로부터 멀어지게 하고, 관련된 타원형 구동 평면들 사이에 작은 간극을 생성하는 상태를 초래할 수 있다는 것이 설계의 신규한 특성에 의해, 인정된다.
그러나, 원뿔(또는 원뿔의 절두체) 주위에서 일어나는 부착으로 인해, 관련된 타원형 날개에서 간극이 제거되게 하고 접촉이 성취되게 하는 방식으로, 드라이버에 가해지는 회전력으로 인해, '슬라이딩(sliding)'이 일어나게 될 것이다. 특히, 그러한 특징은 종래 기술의 시스템의 방사상 날개의 저부 부분에서 기계적인 부착을 가함으로써 성취될 수 없다.
위의 기술로부터, 나사 리세스 및 정합 드라이버의 본 발명의 혁신적인 구성이 사용 중인 십자형 또는 3-날개 시스템에 비해 다음의 진보를 제공할 것이라는 것을 알게 될 수 있다.
- '나사 구동'의 특징으로서 요구되는 회전력을 전달하고, 이를 통해 타원형 및 로브형 형성부를 결합하는, 구동 시스템.
- 관련된 리세스 및 드라이버의 날개 및 리세스 코어 특징부의 엄격한 허용 오차를 설정할 필요 없이, 축방향 평면에서 드라이버가 리세스에 접근하는 상태로 나사 리세스 및 드라이버가 결합되게 하는 시스템.
- 날개 접촉이 양호한 구동 영역에서 일어나게 하기 위해, 리세스로부터의, 드라이버의 후퇴(withdrawal)를 요구하지 않는, 리세스와 드라이버 사이의, 기계적인 부착을 제공하는 드라이버 및 리세스 시스템.
상기 시스템의 구성의 신규성의 이해를 향상시키기 위해 그리고 본 발명의 혁신기술이 생성될 수 있는 방식을 강조하기 위해, #2 크기 드라이버 및 리세스의 생성을 위한 나사 리세스의, 물리적인 크기 그리고, 추론에 의해, 대응하는 드라이버 치수를 결정하는 수학적인 분석을 따른다.
이러한 목적을 위해, 도 7 및 도 7a의 참조가 초기에 행해져야 한다.
단계 1
초기 목표는 90° 플랫 헤드 스타일의, 나사 헤드 직경 M3.5 내지 M5에 적합한 것으로서 언급된, 각도(α)의 크기를 설정하는 것이다.
헤드 직경(200)(도 7)은 M5 나사의 헤드 직경을 나타낸다(크기는 9.3 mm 직경으로 선택됨).
헤드 직경(201)(도 7)은 M3.5 나사의 헤드 직경을 나타낸다(크기는 7.3 mm 직경으로 선택됨).
이것은 3.5 mm 나사가 도 7에서 202로 지정되는 5 mm 직경 나사의 헤드 높이보다 1.00 mm 낮은 헤드 높이를 갖도록 설정할 것이다(도 7a에 도시된 바와 같이 14의 위치보다 낮은 14a의 위치).
리세스 날개의 외주연에 관련되는 외접원(203)(도 5)은 M5 나사에 대해, 5.60 mm 직경인 것으로서 선택된다.
리세스 날개의 외주연에 관련되는 외접원은 M3.5 나사에 대해, 4.58 mm 직경인 것으로서 선택된다.
이들 외접원 직경의 선택은 이들 숫자로 본 발명의 혁신기술을 제한하지 않는다. 그것들은 본 발명의 혁신기술의 요소의 각각에 의해 형성되는 관계를 예시할 목적을 위해 선택된다.
따라서, 각도(α)의 탄젠트는,
tan α=(5.6-4.58)/2=0.590=27°로부터 생성되고, 드라이버 및 리세스 날개의 끼인 원뿔 각도(included cone angle)는 54°이다.
단계 2
이러한 다음의 단계는 리세스 날개의 형상 및 구성을 생성하는 것이다. M5 나사에 대한, 날개 폭의 선택은 1.65 mm의 크기를 갖는 날개 폭의 선택이다. 위에 언급된 바와 같이, 선택은 재차, 예시적인 목적을 위한 것이고, 본 발명의 혁신기술에 대해 제한적인 것으로 간주되지 않아야 한다. 방사상 날개의 형상은 원뿔로부터 생성된다.
원뿔은 리세스 폭 1.65 mm에 대해 선택된 폭과 동일한 밑면 직경(base diameter)(도 6의 205)을 갖는다. 이러한 숫자는 본 발명의 혁신기술에 대해 비제한적인 것으로서 또한 간주되어야 한다.
원뿔 각도는 예시적인 목적을 위해, 8° 포함(Φ, 도 6)인 것으로서 선택되지만, 드라이버 상의, 정합 각도가 동일한 선택 수치로 유지된다면 범위 4° 내지 8° 내에 놓일 수 있다.
각도(β)는 그 각도에 직각인 각도가 날개가 나사의 축에 대해, 나사 헤드 내로 가압되는 방향을 제어하는 각도인 각도에 직접적으로 관련된다.
따라서,
β=α-(Φ/2)=23°(8°의 원뿔 각도에 대해, 그리고 4°의 원뿔 각도에 대해 25°)
실용적인 목적을 위해, 원뿔의 절두체의 더 작은 직경이 헤드에 침투하는 높이(211)(도 6)는 M5 직경 나사의 헤드 높이보다 크지 않아야 한다(2.70 mm).
그리고,
침투 깊이(207)(도 6)=(211/cosα)(cos(Φ/2))
=(2.70/0.8910)(0.9976)=3.02 mm
원뿔의 절두체의, 작은 직경(206)(도 6)은,
206=205-(2X(207X(tan(Φ/2)))
=1.65-(2X(3.02(0.0699))=1.23
과 같이 계산된다.
이들 계산은 리세스의 방사상 외측 날개의 형상을 설정한다.
본 발명의 혁신기술의 이러한 섹션의, 상부 표면은 타원형인 것으로서 보인다는 것을 알게 될 것이다. 토크의 유리한 전달을 제공하는 것은 드라이버와 리세스 사이의, 정합 타원형 구동 면이다.
단계 3
이러한 생성에서, 리세스의 상부에서의 영역을 구성하는 원뿔의 절두체를 고려할 것이다. 이러한 생성은 리세스를 향상시키기 위해 많은 것들을 행한다.
a) 그것은 도 5에서 210으로서 도시되는 간섭 영역을 제거한다.
b) 그것은 리세스 깊이를 체크하는 데 사용될 수 있는, 리세스 내의, 위치를 생성한다.
c) 그것은 리세스와 드라이버 사이의, 기계적인 부착 위치를 허용한다.
헤드의 상부 표면에서의, 원뿔의 직경에 대한 치수는,
직경(204)(도 8)=203-205(도 5 & 6)
204=5.6-1.65=3.95 mm
로부터 생성된다.
절두체의 깊이(305)=
1.25X높이 차이(202)(도 7)
=1.25X1.00=1.25 mm
예시적으로, 이러한 높이는 1.25와 1.50 사이에서 변화할 수 있다. 무엇이 선택되든 로브형 중심의 내접원에 조정이 행해질 것을 요구할 것이다.
예시적인 목적을 위해, 원뿔의 각도(α)는 27°의 선택된 수치로 남아 있을 것이다. 원뿔의 절두체의 하부 직경(306)(도 8)은,
직경(306)=직경(204)-(2X(305 tan α))
=3.95-(2X(1.25X0.5095)
=3.95-1.274=2.68 mm.
이러한 계산된 수치는 리세스의 로브형 내측 코어의 내접원(306)이 된다.
로브형 코어의 외접원(307)(도 9)은 토크가 가해질 때에 드라이버와 리세스 사이의 미끄러짐(slippage)을 방지할 목적을 위해 적합한 것으로 보이는 선택된 수치이다.
예시의 목적을 위해, 외접원(307)의 수치는,
3.137 mm
인 것으로서 선택된다.
따라서, 내측 코어의, 로브형 형상은 예시적으로 TRILOBULAR® 구성의 로브형 형상일 것이고, 다음의 크기를 가질 것이다.
외접원(307)=3.137 mm
내접원(306)=2.68
헤드(M5 크기 제품)의 표면으로부터의, 이러한 로브형 내측 코어의, 깊이는 비틀림 시의, 체결구의, 강도가 나사를 구동하는 데 적합한 것으로서 유지될 수 있게 하는 깊이일 것이다. 이러한 예시를 위해, 리세스 깊이(308)(도 8)에 대한 수치는 헤드 높이(208)+25%인 것으로 생각된다. 이것은 5 mm 나사에 대해 3.38 mm에 해당한다.
위의 명세서의 단계 1, 2 및 3 하에서 수행된 계산은 상기 시스템의 독창적인 특성의 고려사항이다.
제조 허용 오차 요건을 고려하면, 필요한 요건을 설정하기 위해 숫자들 중 일부를 변형할 필요가 있다. 드라이버 리세스 결합을 가능하게 하기 위해, 신규한 정합 원뿔을 사용하는 것이 적합하지만, 본 기술분야의 통상의 기술자는 일부 치수를 적합한 제어 없는 상태로 남겨두기 위해, 상기 시스템의, 제조업자에게 적합한 치수설정의 선택에서 너무 많은 자유를 준다는 것을 인정할 것이다.
일부의 제조 제어를 고려하여, 본 발명을 해치지 않으면서 수용될 수 있는 고려된 허용 오차 밴드가 기재된다.
제조 고려사항
본 기술분야의 통상의 기술자에게, 동일한 크기 및 구성을 갖는 드라이버 및 리세스 둘 모두를 가져오는 방식으로 치수 제어를 갖는 것이 본 발명의 최상의 있을 수 있는 사용이라는 것이 명백할 것이다. 원뿔에 대한 변형을 기초로 하는 신규한 형상의 사용에 의해, 본 발명은 드라이버 및 리세스 형상의 결합에서 일관성이 취해질 수 있고 이는 공지된 십자형 및 3-날개 시스템의 직선 측면형 방사상 날개로는 성취되지 않으며, POZIDRIV®, SUPADRIV® 또는 PHILLIPS® 리세스 또는 드라이버의 외부 원뿔 각도에 행해지는 변화는 본 발명에 취해진 방법 및 접근법과 동일한 정도의 효과를 충족시키지 못할 것이라는 점이 또한 명백할 것이다.
그러나, 치수의 정확성 및 제어에서 행해진 진보에도, 리세스가 1930년대에 소개되었으므로, 대량 생산 산업에 관련되는 기능, 능력 및 품질 제어를 성취하기 위해 고려될 사항이 있다는 것이 인정되어야 한다.
고려사항 1은 본 발명의 방사상 날개에 대한 초기 기초인 원뿔의 절두체에 관련된다. 드라이버 및 리세스의 결합에 관련되는, 목표는 최대 가능 깊이 결합이 성취되게 하는 것일 것이다. 그러한 조건을 성취하기 위해, 제조 허용 오차가 고려될 때, 드라이버 구성이 리세스의 구성보다 작을 것을 요구할 것이다.
가장 효과적인 방식으로, 토크를 전달하기 위해, 그리고 적용될 치수 허용 오차를 고려하여, 목표로 하는 접촉은 리세스의 상부, 외측 위치에 근접하여야 한다는 것이 추가로 인정된다.
따라서, 초기 접촉이 드라이버 및 리세스의 내측 깊이 위치에서 일어나는 것을 피하기 위해, 날개 원뿔 각도가 리세스 내의 그것의 각각의 대응부의 크기보다 큰 크기로 되어 있는 것이 허용가능할 것이다.
리세스 날개 원뿔 각도가,
8°+0/-1° 포함이고,
드라이버 날개 원뿔 각도가,
8°-0/+1° 포함인 것을,
고려하기로 한다.
고려사항 2는 날개의 날개 절두체 및 후속의 타원형 형상이 생성되는 원뿔 치수에 부여되는 허용 오차에 관련된다.
드라이버가 그것의 최대 깊이까지 리세스 내로 침투하도록 재차 유도할 수 있으면 이익이 성취된다. 이것은 리세스의, 이론적인 원뿔 밑면 치수보다 작은, 드라이버의, 원뿔 밑면 치수를 가짐으로써 성취된다.
리세스의, 이론적인 원뿔 밑면 치수가,
1.65 mm-0+0.04 mm이고,
드라이버에 대한, 이론적인 밑면 치수가,
1.65 mm-0.04+0 mm인 것을,
고려하기로 한다.
고려사항 3은 드라이버와 리세스 사이의 계면의 치수 및 기능을 고려한 중심 원뿔 절두체 그리고 이러한 원뿔의 상대 요건에 관련된다.
상기 기능은 드라이버와 리세스 사이의, 어느 정도의 안정성을 제공하는 것이지만, 추가로 드라이버와 리세스 사이의 기계적인 부착을 성취하는 것이다. 이러한 부착은 단지 나사가 그것이 조립 위치에 제공되는 동안에 드라이버로부터 떨어지는 것을 차단하는 특징을 제공하는 것이다. 나사가 제자리에 있고, 구동이 일어나면, 이러한 특징은 더 이상 요구되지 않는다. 리세스의 상부 외측 위치에서의, 직경은 3.95 mm 직경으로서 계산되었고, 하부 직경은 2.68 mm로서 계산되었다. 원뿔의 절두체의 끼인 각도는 54°이다.
목표는 이러한 각도가 1° 이하만큼 증가하는 것이다.
따라서, 리세스 중심 원뿔 각도는,
54°+1°-0
내에 포함될 것이고,
드라이버 원뿔 각도는, 이러한 기준에서,
54°+0-1°
내에 포함될 것이다.
이것은 원뿔(절두체)의 내측 영역을 향한, 리세스 및 드라이버의 접촉(부착) 영역을 목표로 할 것이다.
테이퍼 상의, 이러한 내측 접촉 위치는 구하고 있는 부착을 부여할 것이지만, 2° 이상의 드라이버 리세스 축 이탈(out of line)이 일어나지 않도록 드라이버와 리세스 사이의 안정성을 또한 유지할 것이다.
내측 원뿔 절두체의 목표 치수는 2.68 mm로 남아 있을 것이지만, 로브형 코어의, 실제적인 내접원 직경은 한계 내에 있을 것이다.
따라서, 내접원=2.68+0.02/-0
따라서, 드라이버 원뿔과의 교차부에서의 드라이버의 내접원은,
2.86 mm-0.02/-0.04
일 것이다.
이것은 리세스의, 로브형 내측 코어와 대응하는 드라이버 지점 사이에 작은 크기의 간극을 생성할 것이다. 드라이버/리세스 결합체의 이러한 영역에서의, 부착의 목표는 사실상, 날개가 드라이버 및 리세스의 완전한 결합을 성취하는 것을 차단하는 것일 것이다. 그것들은 중심 코어에서의 웨징 작용에 의해 차단될 것이다.
그러나, 토크가 드라이버에 가해지면 그리고 그러한 토크가 나사의, 구동 작용을 수행할 것을 리세스가 요구할 때, 리세스 및 드라이버의, 중심 원뿔은 서로에 대해 '미끄러질' 것이고, 타원형 구동 면에서 잠재적으로 생성되는 간극이 제거될 것이다. 예시적으로, 드라이버 및 리세스 사이의 '미끄러짐'의 유일한 제한은 날개 간극 및/또는 로브형 코어 간극이 제거된 때이다.
위의 기술은 특정 실시예로 지향되었다. 그러나, 기술된 실시예에 대한 다른 변화 및 변형이 그것들의 이점 중 일부 또는 모두를 달성하면서, 행해질 수 있다는 것이 명백할 것이다. 따라서, 이러한 기술은 본 명세서의 실시예의 범주를 제한하는 것이 아니라 단지 예로서 행해져야 한다. 따라서, 첨부된 청구범위의 목적은 본 명세서의 실시예의 진정한 사상 및 범주 내에 속하는 것과 같은 모든 그러한 변화 및 변형을 포함하는 것이다.
Claims (12)
- 체결구이며,
헤드;
체결구의 헤드 내에서 종료하는 3개의 방사상 홈을 추가로 포함하는, 헤드 내의, 중심 공동으로서,
상기 중심 공동은 방사상 연장 홈의 가상 중심과 일치하여 위치되는, 최대, 외접원을 갖는 3개의 로브를 갖는 로브형 내측 영역을 포함하고,
상기 방사상 연장 홈은 그 중심선이 체결구의 축에 평행한 축으로부터 멀어지도록 경사지는 원뿔의 절두체로부터 생성되며, 날개가 체결구의 헤드 내로 진행함에 따라 타원형 및 내향 테이퍼링된 타원형 섹션을 제공하는 효과를 갖는 리세스의, 내향 테이퍼링된, 외측 원뿔 각도를 제공하는,
중심 공동; 및
로브형 내측 영역의 내접원에서 종료하는 원뿔의 절두체로서 구성되는 공동의 추가적인 중심 부분
을 포함하는, 체결구. - 제1항에 있어서, 리세스 날개의 외측 원뿔 각도는 체결구의 축에 대해 27°의 각도로 되어 있는, 체결구.
- 제1항에 있어서, 날개의 외측 원뿔 각도는 체결구의 축에 대해 25° 내지 27°의 각도로 되어 있는, 체결구.
- 제1항에 있어서, 리세스의 방사상 날개를 생성하는 데 사용되는 원뿔의 절두체는 8°의 끼인 원뿔 각도를 갖는, 체결구.
- 제1항에 있어서, 리세스의 방사상 날개를 생성하는 데 사용되는 원뿔의 절두체는 범위 4° 내지 8° 내에 놓인 끼인 각도를 갖는, 체결구.
- 제1항에 있어서, 방사상 날개를 생성하는 데 사용되는, 원뿔의 절두체의 중심선은 제2항 또는 제3항에 대한 리세스 외측 원뿔 각도와 정합하는 공동의 방사상 최외각 측면을 제공하도록 되어 있는, 체결구.
- 제1항에 있어서, 원뿔의 절두체는 헤드의 상부 표면에 인접한 중심 공동에서, 방사상 날개의 타원형 상부 모서리의 최대 폭보다 작은, 방사상 날개의 최외각 위치의 외접원에 해당하는 크기를 갖는, 체결구.
- 제1항에 있어서, 원뿔의 절두체의 끼인 각도는 54°이고, 헤드의 표면에서의 최대 직경으로부터 내향으로 테이퍼링된, 체결구.
- 제8항에 있어서, 원뿔의 절두체의, 원뿔 각도는 범위 54° 내지 55° 내에 놓인, 체결구.
- 제1항에 있어서, 중심 공동의 깊이는 원뿔의 절두체로부터 생성될 때에, 로브형, 중심 공동의 내접원 직경부에서 종료하는, 체결구.
- 특정된 종류의 체결구에 있어서, 체결구의 헤드 내에서 종료하는 4개의 방사상 홈을 추가로 포함하는 헤드 내의 중심 공동으로서, 상기 중심 공동은 방사상 연장 홈의 가상 중심과 일치하여 위치되는 최대 외접원을 갖는 4개의 로브를 갖는 로브형 내측 영역을 포함하고, 상기 방사상 연장 홈은 그 중심선이 체결구의 축에 평행한 축으로부터 멀어지도록 경사지는 원불의 절두체로부터 생성되며, 날개가 체결구의 헤드 내로 진행함에 따라 타원형 및 내향 테이퍼링된 타원형 섹션을 제공하는 효과를 갖는 리세스의 내향 테이퍼링된 외측 원뿔 각도를 제공하는, 중심 공동; 및
로브형 내측 영역의 내접원에서 종료하는 원뿔의 절두체로서 구성되는 공동의 추가적인 중심 부분
을 특징으로 하는, 체결구. - 특정된 종류의 체결구에 있어서, 체결구의 헤드 내에서 종료하는 2개의 직경방향 대향 방사상 홈을 추가로 포함하는 헤드 내의 중심 공동으로서, 상기 중심 공동은 직경방향 대향 홈의 가상 중심선과 일치하여 위치되는 최대 외접 직경을 갖는 계란형 내측 영역을 포함하고, 상기 직경방향 대향 홈은 그 중심선이 체결구의 축에 평행한 축으로부터 멀어지도록 경사지는 원뿔의 절두체로부터 생성되며, 날개가 체결구의 헤드 내로 진행함에 따라 타원형 및 내향 테이퍼링된 타원형 섹션을 제공하는 효과를 갖는 리세스의 내향 테이퍼링된 외측 원뿔 각도를 제공하는, 중심 공동; 및
계란형 내측 영역의 내접원에서 종료하는 원뿔의 절두체로서 구성되는 공동의 추가적인 중심 부분
을 특징으로 하는, 체결구.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462093236P | 2014-12-17 | 2014-12-17 | |
| US62/093,236 | 2014-12-17 | ||
| PCT/US2015/065198 WO2016100110A1 (en) | 2014-12-17 | 2015-12-11 | Recessed head fastener and driver combination |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170097040A true KR20170097040A (ko) | 2017-08-25 |
Family
ID=55071166
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177016552A KR20170097040A (ko) | 2014-12-17 | 2015-12-11 | 리세스형 헤드 체결구 및 드라이버 결합체 |
Country Status (13)
| Country | Link |
|---|---|
| US (1) | US9957993B2 (ko) |
| EP (1) | EP3234382A1 (ko) |
| JP (1) | JP6513198B2 (ko) |
| KR (1) | KR20170097040A (ko) |
| CN (1) | CN107427992A (ko) |
| AU (1) | AU2015362900B2 (ko) |
| BR (1) | BR112017012818A2 (ko) |
| CA (1) | CA2968684A1 (ko) |
| MX (1) | MX361837B (ko) |
| RU (1) | RU2672660C1 (ko) |
| SG (1) | SG11201704146PA (ko) |
| TW (1) | TWI662200B (ko) |
| WO (1) | WO2016100110A1 (ko) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10690168B2 (en) | 2017-04-14 | 2020-06-23 | Maclean-Fogg Company | Three-point fastener |
| US10995788B2 (en) | 2017-12-15 | 2021-05-04 | Phillips Screw Company | Stick fit fastener recess system |
| US11466720B2 (en) | 2017-12-15 | 2022-10-11 | Phillips Screw Company | Stick fit fastener recess system |
| US11028870B2 (en) | 2018-01-16 | 2021-06-08 | Maclean-Fogg Company | Hybrid three-point drive fastener |
| JP6998839B2 (ja) * | 2018-06-25 | 2022-01-18 | グローバルウェーハズ・ジャパン株式会社 | エピタキシャルシリコンウェーハの製造方法 |
| WO2021045649A1 (ru) * | 2019-09-05 | 2021-03-11 | Павел Анатольевич КОЛОСОВСКИЙ | Головка крепежного элемента |
| USD980707S1 (en) * | 2021-02-15 | 2023-03-14 | Min Woo Lee | Bolt |
Family Cites Families (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2046839A (en) | 1935-01-15 | 1936-07-07 | Phillips Screw Co | Screw |
| US2084079A (en) * | 1935-11-15 | 1937-06-15 | American Screw Co | Screw |
| US2592462A (en) | 1951-09-11 | 1952-04-08 | Res Eng & Mfg | Recessed head fastener |
| NL278918A (ko) | 1961-05-26 | |||
| US4151621A (en) * | 1974-09-12 | 1979-05-01 | Phillips Screw Company | Tools for punching fastener heads |
| GB1521141A (en) | 1975-07-19 | 1978-08-16 | Gkn Fasteners Ltd | Threaded fastener |
| ZA814701B (en) | 1980-07-23 | 1982-07-28 | Gkn Screws Fasteners Ltd | Fastener and driver comination |
| US5019080A (en) * | 1990-02-13 | 1991-05-28 | Trextron Inc. | Drive system for prosthetic fasteners |
| US5207132A (en) * | 1991-10-16 | 1993-05-04 | Textron Inc. | Elliptical lobed drive system |
| GB9200093D0 (en) * | 1992-01-04 | 1992-02-26 | Gill Peter J | Improved threaded fastener |
| JPH0744356U (ja) * | 1992-02-24 | 1995-11-14 | 政雄 和智 | 丸ネジ |
| JPH0737805B2 (ja) * | 1992-11-17 | 1995-04-26 | 有限会社新城製作所 | 凹部付きねじ及びそのドライバビット |
| IT1269314B (it) * | 1994-04-14 | 1997-03-26 | Carlo Sala | Vite e relativo attrezzo d'avvitamento |
| JP3009608U (ja) * | 1994-09-29 | 1995-04-11 | 株式会社サンノハシ | 盗難防止用ボルト |
| CA2269723C (en) * | 1996-10-24 | 2007-04-10 | Katsuyuki Totsu | Screw, driver bit and header punch for manufacture of screw |
| US6223634B1 (en) * | 1997-10-03 | 2001-05-01 | Phillips Screw Company | Recessed head fastener and driver systems |
| US5957645A (en) * | 1997-10-31 | 1999-09-28 | Phillips Screw Company | Spiral drive system for threaded fasteners |
| WO1999047820A1 (es) * | 1998-03-18 | 1999-09-23 | Francisco Casino Lorite | Conjunto de tornillo y destornillador mutuamente autoagarrables |
| NO994934L (no) * | 1999-10-08 | 2001-04-09 | Jone Edland | Skruehode og verktøy |
| JP4493135B2 (ja) * | 2000-01-06 | 2010-06-30 | 勝行 戸津 | ねじとドライバービットの組合せ |
| US20030059276A1 (en) * | 2001-09-26 | 2003-03-27 | Chen Chin Sun | Screw socket opening for receiving various tool bits |
| US6890139B2 (en) * | 2002-02-26 | 2005-05-10 | Phillips Screw Company | Fastener having recess useable with multiple drivers and method of manufacture |
| JP4197599B2 (ja) * | 2002-03-12 | 2008-12-17 | 勝行 戸津 | いじり防止ねじ及びドライバービットとの組合せ並びにいじり防止ねじ製造用ヘッダーパンチ |
| DE10260828A1 (de) * | 2002-12-23 | 2004-07-08 | Sfs Intec Holding Ag | Verfahren zur Herstellung einer Schraube sowie nach dem Verfahren hergestellte Schraube |
| JP4205990B2 (ja) * | 2003-05-30 | 2009-01-07 | 日東精工株式会社 | 駆動穴付きねじ及びドライバビット |
| US7111531B1 (en) * | 2005-04-11 | 2006-09-26 | Kabushiki Kaisha Suzuki Rashi Seisakusho | Screw and screwdriver |
| CN1862036A (zh) * | 2005-05-10 | 2006-11-15 | 宽仕工业股份有限公司 | 螺丝、冲具与起子头 |
| GB2437537A (en) * | 2006-04-24 | 2007-10-31 | Jone Edland | Screw head with hexalobular recess and corresponding tool |
| JP5303080B2 (ja) * | 2007-06-27 | 2013-10-02 | 輝文 野地川 | ねじおよびドライバビット |
| CN101498333A (zh) * | 2008-01-30 | 2009-08-05 | 宽仕工业股份有限公司 | 螺丝、冲具及起子头 |
| KR20110022169A (ko) * | 2009-08-27 | 2011-03-07 | 주식회사 세한이엔지 | 기능성 볼트 |
| US8291795B2 (en) * | 2010-03-02 | 2012-10-23 | Phillips Screw Company | Fastener system with stable engagement and stick fit |
| JP2012159092A (ja) * | 2011-01-28 | 2012-08-23 | Nitto Seiko Co Ltd | ソケット |
| KR101960122B1 (ko) * | 2011-08-25 | 2019-03-19 | 인파스텍 인텔렉츄얼 프로퍼티즈 피티이. 엘티디. | 테이퍼진 로브형 드라이버 및 패스너 |
| DE102013105812A1 (de) * | 2013-06-05 | 2014-12-11 | Ejot Gmbh & Co. Kg | Schraubenantrieb |
-
2015
- 2015-12-11 AU AU2015362900A patent/AU2015362900B2/en not_active Ceased
- 2015-12-11 KR KR1020177016552A patent/KR20170097040A/ko unknown
- 2015-12-11 JP JP2017530756A patent/JP6513198B2/ja not_active Expired - Fee Related
- 2015-12-11 US US14/966,179 patent/US9957993B2/en not_active Expired - Fee Related
- 2015-12-11 MX MX2017007158A patent/MX361837B/es active IP Right Grant
- 2015-12-11 CA CA2968684A patent/CA2968684A1/en not_active Abandoned
- 2015-12-11 CN CN201580069580.2A patent/CN107427992A/zh active Pending
- 2015-12-11 WO PCT/US2015/065198 patent/WO2016100110A1/en active Application Filing
- 2015-12-11 RU RU2017123990A patent/RU2672660C1/ru not_active IP Right Cessation
- 2015-12-11 BR BR112017012818A patent/BR112017012818A2/pt not_active Application Discontinuation
- 2015-12-11 EP EP15820712.6A patent/EP3234382A1/en not_active Withdrawn
- 2015-12-11 SG SG11201704146PA patent/SG11201704146PA/en unknown
- 2015-12-17 TW TW104142399A patent/TWI662200B/zh not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| AU2015362900A1 (en) | 2017-06-08 |
| JP2017538902A (ja) | 2017-12-28 |
| US20160230799A1 (en) | 2016-08-11 |
| BR112017012818A2 (pt) | 2018-01-02 |
| MX2017007158A (es) | 2017-08-28 |
| EP3234382A1 (en) | 2017-10-25 |
| AU2015362900B2 (en) | 2018-10-25 |
| TW201634821A (zh) | 2016-10-01 |
| WO2016100110A1 (en) | 2016-06-23 |
| SG11201704146PA (en) | 2017-07-28 |
| US9957993B2 (en) | 2018-05-01 |
| MX361837B (es) | 2018-12-18 |
| CA2968684A1 (en) | 2016-06-23 |
| RU2672660C1 (ru) | 2018-11-16 |
| CN107427992A (zh) | 2017-12-01 |
| JP6513198B2 (ja) | 2019-05-15 |
| TWI662200B (zh) | 2019-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170097040A (ko) | 리세스형 헤드 체결구 및 드라이버 결합체 | |
| EP2420354B1 (en) | Structure for coupling between a screw head and a tightening tool | |
| US10428859B2 (en) | Combination recess for driven fastener | |
| JP6996815B2 (ja) | テーパ状のローブ状ドライバ及び締結具 | |
| JP4801837B2 (ja) | ネジ山付留め具のための渦巻型駆動システム | |
| US10065293B2 (en) | Tool, screw and system for transmitting a drive torque | |
| US6951158B1 (en) | System comprising a screw and a tool therefor | |
| CN106415029A (zh) | 螺钉及具有倒角的驱动部件 | |
| TWI658906B (zh) | 具有形成於其之一端處的一起子可接合凹口的一種螺紋扣件、扣件系統及形成具有形成於其之一端處的一起子可接合凹口的一螺紋扣件之方法 | |
| JPH0781575B2 (ja) | 凹部付きねじ及びそのドライバビット | |
| US20130011216A1 (en) | Drive Formation for a Rotary Drive | |
| JPH06509859A (ja) | ねじ山付き固定部材、特にねじとねじ締め工具 | |
| US20120189980A1 (en) | Assembly of a dental implant and an insertion tool | |
| US20230250843A1 (en) | Tool attachment point with alignment aid | |
| EP2560791A1 (en) | Screw head and tool for use therewith | |
| TW201928220A (zh) | 卡緊配合的扣件凹槽系統 | |
| JP2010052089A (ja) | ドライバービット及びねじ並びにこれらの組合せ |