KR20120111681A - 리프트 장치 - Google Patents
리프트 장치 Download PDFInfo
- Publication number
- KR20120111681A KR20120111681A KR1020110030319A KR20110030319A KR20120111681A KR 20120111681 A KR20120111681 A KR 20120111681A KR 1020110030319 A KR1020110030319 A KR 1020110030319A KR 20110030319 A KR20110030319 A KR 20110030319A KR 20120111681 A KR20120111681 A KR 20120111681A
- Authority
- KR
- South Korea
- Prior art keywords
- rail
- guide
- moving part
- frame
- lifting
- Prior art date
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/02—Manipulators mounted on wheels or on carriages travelling along a guideway
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
- B66B9/06—Kinds or types of lifts in, or associated with, buildings or other structures inclined, e.g. serving blast furnaces
- B66B9/08—Kinds or types of lifts in, or associated with, buildings or other structures inclined, e.g. serving blast furnaces associated with stairways, e.g. for transporting disabled persons
- B66B9/0807—Driving mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
- B66B9/16—Mobile or transportable lifts specially adapted to be shifted from one part of a building or other structure to another part or to another building or structure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
- B66B9/16—Mobile or transportable lifts specially adapted to be shifted from one part of a building or other structure to another part or to another building or structure
- B66B9/187—Mobile or transportable lifts specially adapted to be shifted from one part of a building or other structure to another part or to another building or structure with a liftway specially adapted for temporary connection to a building or other structure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/20—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes with supporting couples provided by walls of buildings or like structures
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Robotics (AREA)
- Manipulator (AREA)
Abstract
본 발명은 리프트 장치에 관한 것으로서, 건물 외벽에 설치된 수평 레일을 따라 이동하는 로봇을 건물 외벽에 설치된 수직 레일을 따라 승강 이동시키는 리프트 장치에 있어서, 상기 로봇을 승강 이동시키기 위한 프레임과; 상기 수직 레일을 따라 상기 프레임을 승강 이동시키는 승강 이동 유닛과; 상기 로봇이 상기 프레임으로부터 상기 수직 레일을 따라 이동 가능하게 상기 수평 레일과 연결되는 연결 위치와, 상기 가이드 레일로부터 이격되는 이격 위치 간을 이동 가능하게 상기 프레임에 설치되는 가이드 레일과; 상기 프레임에 설치되어 상기 가이드 레일을 상기 연결 위치와 상기 이격 위치 중 어느 하나로 이동시키는 가이드 레일 이동 유닛을 포함한다. 이에 따라, 본 발명에 따른 리프트 장치는 승강 이동 유닛에 의한 인치 웜 방식의 이동 방법을 구현하고 있으며, 인치 웜 방식이 구현된 승강 이동 유닛에 의하여 로봇은 승강 이동할 수 있기 때문에 대 변위(long range)의 승강 이동이 가능할 뿐만 아니라, 소 변위의 승강 이동 또한 가능하여 정밀도가 높은 승강 이동이 가능하다.
Description
본 발명은 리프트 장치에 관한 것으로서, 더욱 상세하게는 로봇을 승강 이동시키는데 있어서 인치 웜 방식(Inch-worm type)을 이용하여 승강 이동시키는 리프트 장치에 관한 것이다.
건축패러다임의 변화에 의해 100층 이상, 500m 이상의 높이를 가진 건물이 급증하는 추세에서 있다. 그러나, 이러한 초고층 빌딩을 유지보수하는데 있어서, 일반인들은 쉽게 수행할 수 없을 뿐만 아니라 유지보수 기술자의 경우에도 매우 숙련된 전문가가 아니고는 쉽게 작업을 수행할 수 없기 때문에 전문 인력이 항상 부족하다. 그로 인해 용역비가 비싼 문제점이 있을 뿐만 아니라, 비싼 용역비에도 불구하고 사람이 직접 고층에 매달려서 유지보수 작업을 수행하기 때문에 항상 추락 사고의 위험이 존재하는 문제점으로 인해 고층 건물의 외벽이나 유리창 외부를 세척하는 작업이 매우 어려우며, 따라서 도심의 고층 건물들이 장기간 오염에 노출됨으로써 도시의 미관을 해치는 문제점이 있다.
특히, 종래의 곤돌라(gondola)나 그네에 의한 손질에 의존하는 빌딩 외장 벽면의 유지보수 기술에 있어서 고소 작업을 수행하여야 하기 때문에 안전상의 대책을 항상 필요로 한다. 그리고, 이와 같은 종래의 기술에서는 상부로부터 매다는 와이어 로프(wire rope)로 지지하는 상태로 작업을 수행하기 때문에, 바람이나 비 등의 날씨에 의한 영향을 받기 쉽고, 안전 작업이 용이하지 않다. 따라서, 이와 같은 불안정함은 장기 연속 작업이 할 수 없다는 결과를 초래하고, 작업 효율이 낮다는 문제가 있다.
따라서, 상술된 바와 같이 초고층 건물의 준공 후에도 건물 외벽의 유지관리를 위해 많은 비용이 소요되며, 작업 환경의 특징으로 인해 인력 투입에 위험성이 매우 높고 많은 시간이 소요됨에 따라 다양한 작업을 반복 수행할 수 있는 로봇과 로봇을 승강 이동시키는 리프트 장치가 적합한 해결책으로 개발되고 있다.
또한, 고층 건물을 외벽을 시공하는데 있어서 경제성, 안정성, 시공성 확보가 가능한 로봇과 로봇을 승강 이동시키는 리프트 장치도 연구 및 개발되고 있다.
본 발명은 상술한 종래 기술의 문제점을 해결하기 위한 것으로서, 로봇을 승강 이동시키는데 있어서 인치 웜 방식(Inch-worm type)을 이용하여 승강 이동시키는 리프트 장치를 제공하는 것을 그 목적으로 한다.
본 발명의 다른 목적은 로봇을 승강 이동시키기 위한 리프트 장치를 건물 외벽의 모서리에 설치하여 유지보수 및 시공의 사각지대 즉, 데드존을 최소화하는 리프트 장치를 제공하는 것을 그 목적으로 한다.
상기 목적은 본 발명에 따라, 건물 외벽에 설치된 수평 레일을 따라 이동하는 로봇을 건물 외벽에 설치된 수직 레일을 따라 승강 이동시키는 리프트 장치에 있어서, 상기 로봇을 승강 이동시키기 위한 프레임과; 상기 수직 레일을 따라 상기 프레임을 승강 이동시키는 승강 이동 유닛과; 상기 로봇이 상기 프레임으로부터 상기 수평 레일을 따라 이동 가능하게 상기 수평 레일과 연결되는 연결 위치와, 상기 수평 레일로부터 이격되는 이격 위치 간을 이동 가능하게 상기 프레임에 설치되는 가이드 레일과; 상기 프레임에 설치되어 상기 가이드 레일을 상기 연결 위치와 상기 이격 위치 중 어느 하나로 이동시키는 가이드 레일 이동 유닛을 포함하는 것을 특징으로 하는 리프트 장치에 의하여 달성된다.
여기서, 상기 가이드 레일 이동 유닛은 일측은 상기 가이드 레일과 상기 프레임 중 어느 일측에 형성되며 내경에 나사산을 구비하는 관통홀에 삽입되고, 타측은 상기 가이드 레일과 상기 프레임 중 타측에 설치되는 볼 스크류와; 상기 프레임과 상기 가이드 레일 사이에 배치되어 상기 가이드 레일의 상기 연결 위치와 상기 이격 위치 사이의 이동을 안내하는 가이드 샤프트와; 상기 가이드 레일이 상기 연결 위치와 상기 이격 위치 사이를 이동하도록 상기 볼 스크류를 회전시키는 볼 스크류 구동부를 포함하는 것을 특징으로 한다.
또한, 상기 승강 이동 유닛은 승강 볼 스크류와; 상기 수직 레일의 기 설정 위치에 결합 및 결합 해제 가능하며, 상기 수직 레일과 결합 해제된 상태에서 상기 승강 볼 스크류의 회전에 의하여 상기 승강 볼 스크류를 따라 상기 프레임에 대해 독립적으로 승강 이동하는 제1 레일 이동부와; 상기 수직 레일의 기 설정 위치에 결합 및 결합 해제 가능하며, 상기 제1 레일 이동부가 상기 수직 레일에 결합된 상태에서 상기 수직 레일과 결합 해제되어 상기 승강 볼 스크류의 회전에 따라 상기 제1 레일 이동부에 접근 또는 이격되어 상기 프레임을 승강 이동시키는 제2 레일 이동부를 포함하는 것을 특징으로 한다.
그리고, 상기 제1 레일 이동부와 상기 제2 레일 이동부 각각은 상기 제1 레일 이동부와 상기 제2 레일 이동부 각각을 상기 수직 레일에 고정시키는 도킹부와; 상기 수직 레일을 따라 이동되도록 상기 제1 레일 이동부와 상기 제2 레일 이동부 각각을 안내하며, 상기 제1 레일 이동부 또는 상기 제2 레일 이동부가 상기 수직 레일에 결합 해제 상태에서 상기 수직 레일로부터 이탈을 방지하는 가이드부을 포함하는 것을 특징으로 한다.
또한, 상기 수직 레일에는 상기 수직 레일의 길이 방향으로 배열되는 복수 개의 결합홀이 형성되며, 상기 도킹부는 상기 수직 레일의 상기 결합홀에 삽입 또는 인출되는 도킹 핀과; 상기 도킹 핀을 상기 고정 홀에 삽입 또는 인출되도록 상기 도킹 핀을 이동시키는 도킹 핀 이동부를 포함하는 것을 특징으로 한다.
한편, 본 발명에 따른 리프트 장치는 상기 수직 레일과 상기 가이드부 중 어느 일측에는 타측을 향하여 승강 이동방향으로 돌출된 가이드 리브가 형성되고, 타측에는 상기 가이드 리브가 삽입되어 안내하는 가이드 홈이 더 형성된 것을 특징으로 한다.
또한, 상기 수직 레일과 상기 가이드부 중 어느 일측에는 타측을 향하여 승강 이동방향으로 돌출된 가이드 리브가 형성되고, 타측에는 상기 가이드 리브에 지지되어 상기 제1 레일 이동부 또는 상기 제2 레일 이동부의 이탈을 방지하는 레일 바가 더 형성된 것을 특징으로 한다.
한편, 상기 수직 레일은 상기 건물 외벽의 모서리 일측 벽에 형성된 제1 수직 레일과 상기 건물 외벽의 상기 모서리를 형성하는 타측 벽에 형성된 제2 수직 레일을 포함하며, 상기 승강 이동 유닛은 상기 제1 수직 레일 및 상기 제2 수직 레일 각각에 대응하여 마련되는 것을 특징으로 한다.
상기와 같은 구성을 갖는 본 발명에 따른 리프트 장치는 승강 이동 유닛에 의한 인치 웜 방식의 이동 방법을 구현하고 있다. 따라서, 인치 웜 방식이 구현된 승강 이동 유닛에 의하여 본 발명에 따른 리프트 장치는 승강 이동할 수 있기 때문에 대 변위(long range)의 승강 이동이 가능할 뿐만 아니라, 소 변위의 승강 이동 또한 가능하여 정밀도가 높은 승강 이동이 가능하다.
또한, 본 발명에 따른 리프트 장치는 건물 외벽의 모서리에 배치되어 데드존을 최소화함으로써 시공 및 유지보수 작업의 작업 영역을 최대화할 수 있다. 그리고 건물 외벽에는 수평 레일을 설치하고 건물 외벽 모서리에만 수직 레일을 설치하기 때문에 건물 외벽에 시공되는 레일의 시공 비용을 절감할 수 있다..
그리고, 건물 외벽의 모서리에 본 발명에 따른 리프트 장치가 설치될 때 본 발명에 따른 리프트 장치의 횡단면이 ㄱ 자 형태의 구조를 채용함으로써 외부에서 작용할 수 있는 각종 힘에 대하여 좀 더 안정적인 구조를 지향할 수 있다
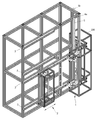
도 1은 본 발명에 따른 리프트 장치를 나타낸 사시도이고,
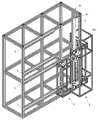
도 2는 본 발명에 따른 리프트 장치가 건물 외벽에 설치된 것을 나타낸 사시도이고,
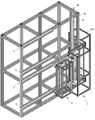
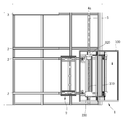
도 3 내지 도 4는 본 발명에 따른 리프트 장치의 가이드 레일 이동 유닛의 동작을 나타낸 도면이고,
도 5는 본 발명에 따른 리프트 장치의 가이드 레일 이동 유닛의 일부분을 나타낸 확대도이고,
도 6 내지 도 7은 본 발명에 따른 리프트 장치의 승강 이동 유닛의 동작에 따라 프레임이 승강 이동하는 것을 나타낸 도면이고,
도 8 내지 도 9는 본 발명에 따른 리프트 장치의 제1 레일 이동부 및 제2 레일 이동부 각각의 도킹 핀이 수직 레일의 결합홀에 삽입되는 동작을 나타낸 도면이고,
도 10 내지 도 11은 본 발명에 따른 리프트 장치의 제1 레일 이동부 및 제2 레일 이동부 각각의 도킹부와 가이드부를 나타낸 도면이다.
도 2는 본 발명에 따른 리프트 장치가 건물 외벽에 설치된 것을 나타낸 사시도이고,
도 3 내지 도 4는 본 발명에 따른 리프트 장치의 가이드 레일 이동 유닛의 동작을 나타낸 도면이고,
도 5는 본 발명에 따른 리프트 장치의 가이드 레일 이동 유닛의 일부분을 나타낸 확대도이고,
도 6 내지 도 7은 본 발명에 따른 리프트 장치의 승강 이동 유닛의 동작에 따라 프레임이 승강 이동하는 것을 나타낸 도면이고,
도 8 내지 도 9는 본 발명에 따른 리프트 장치의 제1 레일 이동부 및 제2 레일 이동부 각각의 도킹 핀이 수직 레일의 결합홀에 삽입되는 동작을 나타낸 도면이고,
도 10 내지 도 11은 본 발명에 따른 리프트 장치의 제1 레일 이동부 및 제2 레일 이동부 각각의 도킹부와 가이드부를 나타낸 도면이다.
이하에서는 첨부된 도면을 참조하여 본 발명에 따른 실시예들에 대해 상세히 설명한다.여기서, 본 발명에 따른 실시예들을 설명하는데 있어, 동일한 구성요소에 대해서는 동일한 참조번호를 사용하며, 필요에 따라 그 설명은 생략할 수 있다.
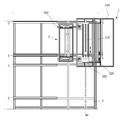
도 1 내지 도 2를 참조하여 살펴보면, 건물 외벽에 설치된 수평 레일(3)을 따라 이동하는 로봇(2)을 건물 외벽에 설치된 수직 레일(4a, 4b)을 따라 승강 이동시키는 리프트 장치(1)에 있어서, 본 발명에 따른 리프트 장치(1)는 프레임(100), 승강 이동 유닛(300), 가이드 레일(500) 및 가이드 레일 이동 유닛(700)을 포함한다. 여기서, 승강 이동 유닛(300)은 승강 볼 스크류(310), 제1 레일 이동부(320), 제2 레일 이동부(330), 승강 볼 스크류 구동 모터(340) 및 승강 가이드 샤프트(350)를 포함한다.
도 6 내지 도 7을 참조하여 살펴보면, 프레임(100)은 프레임(100)에 설치된 승강 이동 유닛(300)에 의하여 수직 레일(4a, 4b)을 따라 승강 이동된다. 또한, 도 2에 도시된 바와 같이 프레임(100)은 건물 외벽의 모서리 일측 벽에 형성된 제1 수직 레일(4a)과 건물 외벽의 모서리를 형성하는 타측 벽에 형성된 제2 수직 레일(4b) 한 쌍을 따라 승강 이동할 수 있다. 여기서, 한 쌍의 수직 레일(4a, 4b)에는 제1 레일 이동부(320)와 제2 레일 이동부(330)가 착탈가능하게 즉, 결합 또는 결합 해제되게 설치되어 승강 이동 유닛(300)이 인치 웜 방식(Inch-worm type)으로 승강 이동함에 따라 프레임(100) 또한 승강 이동하게 된다. 이러한, 인치 웜 방식의 이동 방법은 대 변위(long range)의 승강 이동을 가능하게 할 뿐만 아니라, 소 변위의 승강 이동 또한 가능하여 정밀도가 높은 승강 이동 또한 가능하게 한다. 그리고, 도 2 도시된 바와 같이 프레임(100)은 횡단면이 ㄱ 자 형태의 구조를 채용함으로써 빌딩 외벽의 모서리의 양측 외벽에 설치된 한 쌍의 수직 레일(4a, 4b)에 하나의 프레임(100)으로 장착될 수 있기 때문에 건물의 유지 보수의 사각지대 즉, 데드존을 최소화할 수 있고, 외부에서 작용할 수 있는 각종 힘에 대하여 좀 더 안정적인 구조를 지향할 수 있다. 여기서, 프레임(100)의 횡단면이 ㄱ 자 형태의 구조로 형성된 것을 예로 하고 있으나, 반드시 이에 한정되지 않고 건물의 일측 벽에 형성된 수직 레일(4a, 4b) 각각에 프레임(100)이 설치될 수도 있음은 물론이다.
도 6 내지 도 7을 참조하여 살펴보면, 제1 레일 이동부(320)는 승강 볼 스크류(310)에 결합되어 승강 볼 스크류(310)의 회전에 의하여 승강 볼 스크류(310)를 따라 독립적으로 승강 이동한다. 그리고, 제1 레일 이동부(320)는 후술될 도킹부(locking part)(370)을 포함하며, 도킹부(370)를 이용하여 수직 레일(4a, 4b)에 결합 또는 결합 해제 가능하게 동작한다. 즉, 제1 레일 이동부(320)의 도킹부(370)에 의하여 수직 레일(4a, 4b)에 결합된 상태에서는 승강 볼 스크류(310)를 따라 제1 레일 이동부(320)가 승강 이동하지 못하며, 수직 레일(4a, 4b)에 분리된 즉, 제1 레일 이동부(320)가 수직 레일(4a, 4b)로부터 결합 해제된 경우 제1 레일 이동부(320)는 승강 볼 스크류(310)의 회전에 의하여 프레임(100)에 대하여 자유롭게 독립적으로 승강 볼 스크류(310)를 따라 승강 이동하게 된다.
제2 레일 이동부(330)는 승강 볼 스크류(310)에 결합되어 승강 볼 스크류(310)의 회전에 의하여 승강 볼 스크류(310)를 따라 승강 이동한다. 또한, 제2 레일 이동부(330)는 프레임(100)에 고정되어 있기 때문에 제2 레일 이동부(330)가 승강 볼 스크류(310)의 회전에 의하여 승강 볼 스크류(310)를 따라 승강 이동시 프레임(100)도 함께 승강 이동하게 된다. 여기서, 제2 레일 이동부(330)가 승강 볼 스크류(310)의 회전에 의하여 승강 볼 스크류(310)를 따라 승강 이동시 프레임(100)도 함께 승강 이동하게 되는 경우 제1 레일 이동부(320)는 수직 레일(4a, 4b)에 결합되어 프레임(100)이 승강 이동할 때 지지점의 역할을 하게 된다. 따라서, 제1 레일 이동부(320)가 수직 레일(4a, 4b)에 결합된 상태에서 제2 레일 이동부(330)는 수직 레일(4a, 4b)과 결합 해제되며, 제2 레일 이동부(330)는 승강 볼 스크류(310)의 회전에 따라 제1 레일 이동부(320)에 접근 또는 이격됨으로써 프레임(100)을 승강 이동시킨다.
도 8 내지 도 9를 참조하여 살펴보면, 제1 레일 이동부(320)와 제2 레일 이동부(330) 각각에 구비된 도킹부(370)에 의하여 제1 레일 이동부(320)와 제2 레일 이동부(330) 각각이 수직 레일(4a, 4b)에 결합 또는 결합 해제되는 동작 상태를 확인할 수 있다.
도 8을 참조하면 살펴보면, 제1 레일 이동부(320)의 도킹부(370)는 수직 레일(4a, 4b)과 결합 해제된 상태에 있어 승강 볼 스크류(310)의 회전에 의하여 프레임(100)에 대해 독립적으로 승강 볼 스크류(310)를 따라 승강 이동하게 된다. 이때 제2 레일 이동부(330)의 도킹부(370)는 수직 레일(4a, 4b)에 결합되어 있게 된다.
도 9을 참조하여 살펴보면, 제1 레일 이동부(320)의 도킹부(370)는 수직 레일(4a, 4b)에 결합되어 있는 상태에 있고, 제2 레일 이동부(330)의 도킹부(370)는 수직 레일(4a, 4b)과 결합 해제되어 있기 때문에 제2 레일 이동부(330)는 승강 볼 스크류(310)의 회전에 의하여 승강 볼 스크류(310)를 따라 승강 이동하게 되고, 프레임(100) 또한 제2 레일 이동부(330)의 승강 이동에 따라 승강 이동하게 된다.
즉, 승강 이동 유닛(300)은 승강 볼 스크류(310), 제1 레일 이동부(320) 및 제2 레일 이동부(330)을 이용하여 인치 웜 방식(Inch-worm type)으로 승강 이동하는 승강 이동 방식을 구현한다. 그리고, 상술된 인치 웜 방식을 이용한 승강 이동 방법을 통하여 프레임(100) 또한 승강 이동하게 된다.
승강 볼 스크류 구동 모터(340)는 승강 볼 스크류(310)를 정회전 또는 역회전 시켜 수직 레일(4a, 4b)에 결합 해제된 제1 레일 이동부(320)와 제2 레일 이동부(330)가 볼 스크류(310)을 따라 승강 이동되게 한다.
도 1을 참조하여 살펴보면, 승강 이동 유닛(300)은 고정부(360)를 더 포함할 수 있다. 고정부(360)에는 승강 볼 스크류(310)가 관통되어 회전 가능하게 결합되며, 또한 고정부(360)는 프레임(100)에 고정된다. 즉, 고정부(360)에는 승강 볼 스크류(310)와 회전 가능하게 결합되도록 내경에 나사산을 구비하는 승강 볼 스크류 관통홀(361)이 형성될 수 있다. 또한, 고정부(360)는 후술될 승강 가이드 샤프트(350)의 일측과 결합하여 승강 가이드 샤프트(350)를 지지한다.
도 1을 참조하여 살펴보면, 승강 가이드 샤프트(350)의 일측은 고정부(360)와 결합하고 타측은 제2 레일 이동부(330)와 결합된다. 또한, 승강 가이드 샤프트(350)는 제1 레일 이동부(320)가 승강 볼 스크류(310)을 따라 승강 이동가능하게 제1 레일 이동부(320)와 결합되어 제1 레일 이동부(320)가 승강 볼 스크류(310)의 회전에 의하여 승강 이동할 때 승강 볼 스크류(310)를 따라 승강 이동하도록 안내한다.
한편, 프레임(100)을 승강 이동하는데 있어서, 본 발명에 따른 리프트 장치(1)는 승강 이동 유닛(300)을 통하여 인치 웜 방식으로 프레임(100)을 승강 이동시키는 것을 그 예로 하였으나, 반드시 이에 한정되는 것은 아니며 도르래, 곤돌라 등을 이용하여 프레임(100)을 승강 이동시킬 수 있음은 물론이다.
가이드 레일 이동 유닛(700)은 프레임(100)의 승강 이동에 따라 함께 승강 이동된 로봇(2)이 수평 레일(3)로 이동가능하게 가이드 레일(500)이 수평 레일(3)에 연결되는 연결 위치와, 가이드 레일(500)과 수평 레일(3)이 상호 이격되는 이격 위치 사이를 가이드 레일(500)이 이동되게 한다. 여기서, 가이드 레일 이동 유닛(700)은 프레임(100)에 설치된다.
도 1 및 도 5를 참조하여 살펴보면, 가이드 레일 이동 유닛(700)은 볼 스크류(710), 가이드 샤프트(720), 볼 스크류 구동부(730) 및 지지판(740)을 포함한다. 여기서, 볼 스크류 구동부(730)는 볼 스크류 구동 모터(731)과 구동 풀리(732)를 포함할 수 있다.
볼 스크류 구동 모터(731)는 구동 풀리(732)에 회전력을 전달하여 볼 스크류(710)을 회전시킨다.
지지판(740)은 프레임(100)에 고정되며, 지지판(740)에는 볼 스크류(710) 및 가이드 샤프트(720)가 이동가능하도록 결합된다. 즉, 지지판(740)에는 볼 스크류(710)와 회전 가능하게 결합되도록 내경에 나사산을 구비하는 관통홀(750)이 형성될 수 있다. 따라서, 지지판(740)의 관통홀(750)에는 볼 스크류(710)가 관통되어 회전 가능하게 결합 된다. 따라서, 가이드 레일(500)이 연결 위치와 이격 위치 사이를 상호 이동할 때 지지판(740)은 볼 스크류(710)와 가이드 샤프트(720)를 안내 및 지지한다.
도 3 내지 도 4를 참조하여 살펴보면, 볼 스크류(710)와 가이드 샤프트(720) 각각의 일측은 가이드 레일(500)과 결합되고 지지판(740)에 의해 이동가능하게 지지되기 때문에 볼 스크류(710)의 회전에 따라 가이드 레일(500)은 연결 위치와 이격 위치 사이를 상호 이동하게 된다.
그리고, 가이드 샤프트(720)는 가이드 레일(500)이 연결 위치와 이격 위치 사이를 상호 이동할 때 가이드 레일(500)이 볼 스크류(710)를 따라 이동하도록 안내한다.
또한, 가이드 레일(500)은 프레임(100)을 따라 승강 이동된 로봇(2)이 수평 레일(3)로 이동 가능하도록 배치된다.
도 1 내지 도 4를 참조하여 살펴보면, 건물 외벽에는 로봇(2)이 이동하는데 있어 한 쌍의 수평 레일(3)이 설치되어 있고, 또한 가이드 레일(500)도 수평 레일(3)에 상응하여 한 쌍이 형성되어 있다. 또한, 로봇(2)의 수평 레일(3)을 따라 이동시 안정성을 확보하기 위해 한 쌍의 수평 레일(3)이 형성될 수 있다. 그리고, 한 쌍의 가이드 레일(500) 사이에는 가이드 레일 지지부(510)가 형성되어 있다. 여기서 가이드 레일 지지부(510)는 한 쌍의 가이드 레일(500)을 지지하여 외부의 힘에 의한 변형, 뒤틀림 등의 변형 등이 일어나지 않도록 한다. 또한, 한 쌍의 가이드 레일에 대응하여 가이드 레일 이동 유닛(700) 또한 한 쌍이 구성된다.
한편, 승강 이동 유닛(300)이 인치 웜 방식(Inch-worm type)으로 프레임을 승강 이동시키는데 있어서, 제1 레일 이동부(320)와 제2 레일 이동부(330) 각각이 수직 레일(4a, 4b)에 선택적으로 결합될 수 있도록 제1 레일 이동부(320)와 제2 레일 이동부(330) 각각에는 도킹부(370)를 구비할 수 있다.
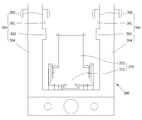
도 10 내지 도 11을 참조하여 살펴 보면, 제1 레일 이동부(320)와 제2 레일 이동부(330) 각각 즉, 제1 레일 이동부(320)와 제2 레일 이동부(330) 각각의 본체(390)에 구비되는 도킹부(370)는 도킹 핀(371)과 도킹 핀 이동부(372)를 포함할 수 있다. 또한, 도킹 핀(371)에는 도킹 핀 돌기(373)을 구비할 수 있으며, 도킹 핀 이동부(372)에는 도킹 핀 돌기(373)가 삽입되어 이동되도록 안내하는 도킹 핀 가이드 홈(374)가 형성될 수 있다. 따라서, 모터(미도시) 등에 의하여 회동 가능하게 연결된 도킹 핀 이동부(372)는 모터 등에 의해 회전하게 되고, 도킹 핀 이동부(372)의 회동에 따라 도킹 핀 가이드 홈(374)에 결합된 도킹 핀 돌기(373)는 도킹 핀 가이드 홈(374)을 따라 이동하여 도킹 핀(371)을 수직 레일(4a, 4b)에 형성된 결합홀(5)에 삽입 또는 인출되게 한다.
또한, 제1 레일 이동부(320)와 제2 레일 이동부(330) 각각은 가이드부(380)을 더 포함할 수 있다. 여기서, 가이드부(380)는 지지 돌기(384), 고정 돌기(383), 레일 바(382) 및 고정 돌기(383)와 레일 바(382) 사이에 형성된 가이드 홈(381)을 포함할 수 있다. 또한, 수직 레일(4a, 4b)은 가이드 홈(381)에 삽입되어 제1 레일 이동부(320)와 제2 레일 이동부(330) 각각이 수직 레일(4a, 4b)로부터 이탈되는 것을 방지하도록 승강 이동 방향을 따라 형성된 가이드 리브(6)를 포함할 수 있다. 그리고, 가이드 리브(6)는 가이드 홈(381)에 삽입되기 때문에 제1 레일 이동부(320)와 제2 레일 이동부(330) 각각의 승강 이동시 제1 레일 이동부(320)와 제2 레일 이동부(330) 각각이 수직 레일(4a, 4b)을 따라 이동할 수 있도록 가이드한다. 또한, 가이드 리브(6)는 가이드 홈(381)에 삽입되기 때문에 제1 레일 이동부(320) 또는 제2 레일 이동부(320)가 수직 레일(4a, 4b)에 결합 해제 상태에서도 수직 레일(4a, 4b)로부터 이탈되는 것을 방지할 수 있다.
도 10을 참조하여 살펴 보면, 가이드부(380)의 한 쌍의 지지 돌기(384)는 도킹 핀(371)이 삽입되는 방향으로 본체(390)로부터 돌출되도록 형성되며, 고정 돌기(383)는 지지 돌기(384)가 서로 마주보는 방향으로 한 쌍의 지지 돌기(384) 각각으로부터 돌출되어 형성된다. 그리고, 레일 바(382)는 지지 돌기(384)가 서로 마주보는 방향으로 한 쌍의 지지 돌기(384) 각각으로부터 돌출되게 설치된다. 따라서, 고정 돌기(383)와 레일 바(382) 사이에는 고정 돌기(383)와 레일 바(382)에 의하여 형성된 가이드 홈(381)이 형성된다. 그리고, 가이드 홈(381)에는 상술된 바와 같이 가이드 리브(6)가 삽입된다. 비록, 본 발명에 따른 리프트 장치(1)에서는 가이드 리브(6)가 수직 레일(4a, 4b)에 형성되고 가이드 홈(381)과 레일 바(382)가 제1 레일 이동부(320)와 제2 레일 이동부(330) 각각에 형성되어 있는 것을 그 예로 하고 있으나, 반드시 이에 한정되는 것은 아니며 제1 레일 이동부(320)와 제2 레일 이동부(330) 각각에 가이드 리브(6)가 형성되고 수직 레일(4a, 4b)에 가이드 홈(381)과 레일 바(382)가 형성될 수 있음은 물론이다.
또한, 본 발명에 따른 리프트 장치(1)는 원격 장치(미도시)를 이용하여 원격할 수 있도록 구성될 수 있으며, 따라서, 건물 외벽을 시공 및 유지보수하는데 있어서, 작업의 안정성과 시공성 및 그에 따른 작업 능률을 향상시킬 수 있다.
이상에서 설명한 본 발명은 바람직한 실시 예들을 통하여 상세하게 설명되었지만, 본 발명은 이러한 실시 예들의 내용에 한정되는 것이 아님을 밝혀둔다. 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자라면, 비록 실시 예에 제시되지 않았지만 첨부된 청구항의 기재 범위 내에서 다양한 본 발명에 대한 모조나 개량이 가능하며, 이들 모두 본 발명의 기술적 범위에 속함은 너무나 자명하다 할 것이다. 따라서, 본 발명의 진정한 기술적 보호 범위는 첨부된 특허청구범위의 기술적 사상에 의해 정해져야 할 것이다.
1 : 리프트 장치 2 : 로봇
3 : 수평 레일 4a, 4b : 수직 레일
5 : 결합 홀 6 : 가이드 리브
100 : 프레임 300 : 승강 이동 유닛
500 : 가이드 레일 700 : 가이드 레일 이동 유닛
3 : 수평 레일 4a, 4b : 수직 레일
5 : 결합 홀 6 : 가이드 리브
100 : 프레임 300 : 승강 이동 유닛
500 : 가이드 레일 700 : 가이드 레일 이동 유닛
Claims (8)
- 건물 외벽에 설치된 수평 레일을 따라 이동하는 로봇을 건물 외벽에 설치된 수직 레일을 따라 승강 이동시키는 리프트 장치에 있어서,
상기 로봇을 승강 이동시키기 위한 프레임과;
상기 수직 레일을 따라 상기 프레임을 승강 이동시키는 승강 이동 유닛과;
상기 로봇이 상기 프레임으로부터 상기 수평 레일을 따라 이동 가능하게 상기 수평 레일과 연결되는 연결 위치와, 상기 수평 레일로부터 이격되는 이격 위치 간을 이동 가능하게 상기 프레임에 설치되는 가이드 레일과;
상기 프레임에 설치되어 상기 가이드 레일을 상기 연결 위치와 상기 이격 위치 중 어느 하나로 이동시키는 가이드 레일 이동 유닛을 포함하는 것을 특징으로 하는 리프트 장치. - 제1항에 있어서,
상기 가이드 레일 이동 유닛은
일측은 상기 가이드 레일과 상기 프레임 중 어느 일측에 형성되며 내경에 나사산을 구비하는 관통홀에 삽입되고, 타측은 상기 가이드 레일과 상기 프레임 중 타측에 설치되는 볼 스크류와;
상기 프레임과 상기 가이드 레일 사이에 배치되어 상기 가이드 레일의 상기 연결 위치와 상기 이격 위치 사이의 이동을 안내하는 가이드 샤프트와;
상기 가이드 레일이 상기 연결 위치와 상기 이격 위치 사이를 이동하도록 상기 볼 스크류를 회전시키는 볼 스크류 구동부를 포함하는 것을 특징으로 하는 리프트 장치. - 제1항 또는 제2항에 있어서,
상기 승강 이동 유닛은
승강 볼 스크류와;
상기 수직 레일의 기 설정 위치에 결합 및 결합 해제 가능하며, 상기 수직 레일과 결합 해제된 상태에서 상기 승강 볼 스크류의 회전에 의하여 상기 승강 볼 스크류를 따라 상기 프레임에 대해 독립적으로 승강 이동하는 제1 레일 이동부와;
상기 수직 레일의 기 설정 위치에 결합 및 결합 해제 가능하며, 상기 제1 레일 이동부가 상기 수직 레일에 결합된 상태에서 상기 수직 레일과 결합 해제되어 상기 승강 볼 스크류의 회전에 따라 상기 제1 레일 이동부에 접근 또는 이격되어 상기 프레임을 승강 이동시키는 제2 레일 이동부를 포함하는 것을 특징으로 하는 리프트 장치. - 제3항에 있어서,
상기 제1 레일 이동부와 상기 제2 레일 이동부 각각은
상기 제1 레일 이동부와 상기 제2 레일 이동부 각각을 상기 수직 레일에 고정시키는 도킹부와;
상기 수직 레일을 따라 이동되도록 상기 제1 레일 이동부와 상기 제2 레일 이동부 각각을 안내하며, 상기 제1 레일 이동부 또는 상기 제2 레일 이동부가 상기 수직 레일에 결합 해제 상태에서 상기 수직 레일로부터 이탈을 방지하는 가이드부을 포함하는 것을 특징으로 하는 리프트 장치. - 제4항에 있어서,
상기 수직 레일에는 상기 수직 레일의 길이 방향으로 배열되는 복수 개의 결합홀이 형성되며,
상기 도킹부는
상기 수직 레일의 상기 결합홀에 삽입 또는 인출되는 도킹 핀과;
상기 도킹 핀을 상기 고정 홀에 삽입 또는 인출되도록 상기 도킹 핀을 이동시키는 도킹 핀 이동부를 포함하는 것을 특징으로 하는 리프트 장치. - 제5항에 있어서,
상기 수직 레일과 상기 가이드부 중 어느 일측에는 타측을 향하여 승강 이동방향으로 돌출된 가이드 리브가 형성되고, 타측에는 상기 가이드 리브가 삽입되어 안내하는 가이드 홈이 더 형성된 것을 특징으로 하는 리프트 장치. - 제5항에 있어서,
상기 수직 레일과 상기 가이드부 중 어느 일측에는 타측을 향하여 승강 이동방향으로 돌출된 가이드 리브가 형성되고, 타측에는 상기 가이드 리브에 지지되어 상기 제1 레일 이동부 또는 상기 제2 레일 이동부의 이탈을 방지하는 레일 바가 더 형성된 것을 특징으로 하는 리프트 장치. - 제1항에 있어서,
상기 수직 레일은
상기 건물 외벽의 모서리 일측 벽에 형성된 제1 수직 레일과 상기 건물 외벽의 상기 모서리를 형성하는 타측 벽에 형성된 제2 수직 레일을 포함하며,
상기 승강 이동 유닛은 상기 제1 수직 레일 및 상기 제2 수직 레일 각각에 대응하여 마련되는 것을 특징으로 하는 리프트 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020110030319A KR101240784B1 (ko) | 2011-04-01 | 2011-04-01 | 리프트 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020110030319A KR101240784B1 (ko) | 2011-04-01 | 2011-04-01 | 리프트 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20120111681A true KR20120111681A (ko) | 2012-10-10 |
| KR101240784B1 KR101240784B1 (ko) | 2013-03-07 |
Family
ID=47282339
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020110030319A KR101240784B1 (ko) | 2011-04-01 | 2011-04-01 | 리프트 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101240784B1 (ko) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101325534B1 (ko) * | 2013-03-25 | 2013-11-07 | 조남영 | 화물용 호이스트를 구비하는 건설용 엘리베이터 |
| KR101411200B1 (ko) * | 2013-04-17 | 2014-06-24 | 고려대학교 산학협력단 | 도킹장치 |
| KR20200006658A (ko) * | 2018-07-11 | 2020-01-21 | 스튜디오쓰리에스 리미티드컴퍼니 | 스마트 컨테이너 시스템 |
| CN111170121A (zh) * | 2020-01-07 | 2020-05-19 | 青岛大学 | 一种电梯导轨质量检测装置和方法 |
| CN111559687A (zh) * | 2020-05-13 | 2020-08-21 | 中国一冶集团有限公司 | 多箱体驻留式施工电梯 |
| KR102201411B1 (ko) * | 2020-08-11 | 2021-01-11 | (주)종합건축사사무소그룹케이 | 공동주택 건축물의 발코니 난간 구조 |
| CN114524337A (zh) * | 2022-02-11 | 2022-05-24 | 内蒙古大唐国际托克托发电有限责任公司 | 一种新型轨道巡检机器人多级巡检提升连接装置 |
| CN115095754A (zh) * | 2022-07-08 | 2022-09-23 | 光子集成(温州)创新研究院 | 一种便携式光学三维平台 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2630120B2 (ja) * | 1991-07-12 | 1997-07-16 | 三菱電機株式会社 | 建物自動清掃装置 |
| JPH10117980A (ja) * | 1996-10-21 | 1998-05-12 | Mitsui Eng & Shipbuild Co Ltd | 高層建築物外壁面清掃装置 |
| JP2010142297A (ja) * | 2008-12-16 | 2010-07-01 | Ohbayashi Corp | 建物外面清掃装置 |
| KR100901326B1 (ko) * | 2008-12-30 | 2009-06-09 | 박팔태 | 건물 외벽 및 외부유리 청소장치 |
-
2011
- 2011-04-01 KR KR1020110030319A patent/KR101240784B1/ko active IP Right Grant
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101325534B1 (ko) * | 2013-03-25 | 2013-11-07 | 조남영 | 화물용 호이스트를 구비하는 건설용 엘리베이터 |
| KR101411200B1 (ko) * | 2013-04-17 | 2014-06-24 | 고려대학교 산학협력단 | 도킹장치 |
| KR20200006658A (ko) * | 2018-07-11 | 2020-01-21 | 스튜디오쓰리에스 리미티드컴퍼니 | 스마트 컨테이너 시스템 |
| CN111170121A (zh) * | 2020-01-07 | 2020-05-19 | 青岛大学 | 一种电梯导轨质量检测装置和方法 |
| CN111559687A (zh) * | 2020-05-13 | 2020-08-21 | 中国一冶集团有限公司 | 多箱体驻留式施工电梯 |
| KR102201411B1 (ko) * | 2020-08-11 | 2021-01-11 | (주)종합건축사사무소그룹케이 | 공동주택 건축물의 발코니 난간 구조 |
| CN114524337A (zh) * | 2022-02-11 | 2022-05-24 | 内蒙古大唐国际托克托发电有限责任公司 | 一种新型轨道巡检机器人多级巡检提升连接装置 |
| CN114524337B (zh) * | 2022-02-11 | 2023-09-22 | 内蒙古大唐国际托克托发电有限责任公司 | 一种轨道巡检机器人多级巡检提升连接装置 |
| CN115095754A (zh) * | 2022-07-08 | 2022-09-23 | 光子集成(温州)创新研究院 | 一种便携式光学三维平台 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101240784B1 (ko) | 2013-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101240784B1 (ko) | 리프트 장치 | |
| CN109736578B (zh) | 一种装配式建筑对位安装辅助定位装置 | |
| CA2747061C (en) | A method for mounting facade elements on a multi-storey building | |
| CN110306776B (zh) | 一种用于高层建筑电梯井施工的升降平台 | |
| JP6893188B2 (ja) | 既存構造物の解体システムおよび解体方法 | |
| CN206706591U (zh) | 一种用于装配式桥梁预制桥墩模板的卧式拼接装置 | |
| KR101179743B1 (ko) | 인치 웜 방식을 이용한 리프트 장치 | |
| CN214399535U (zh) | 一种门式钢架结构吊装装置 | |
| KR200366291Y1 (ko) | 고층건물의 콘크리트벽체 시공을 위한 거푸집 승강시스템 | |
| KR101327675B1 (ko) | 건물 외벽을 따라 이동하는 외벽 클라이밍 장치 | |
| KR101251847B1 (ko) | 외벽 클라이밍 장치 | |
| JP2010112051A (ja) | 昇降式足場 | |
| CN107165052A (zh) | 一种用于装配式桥梁预制桥墩模板的卧式拼装系统 | |
| CN219472110U (zh) | 一种井筒模架滑动模架 | |
| CN103711299A (zh) | 建筑外墙可升降脚手架 | |
| CN220703112U (zh) | 一种移动式升降设备 | |
| CN219081586U (zh) | 适用于中隔墙施工的顶升移动装置及多功能台架 | |
| CN112482735B (zh) | 一种抗风型全钢爬架 | |
| CN102102440B (zh) | 改进的附着升降脚手架的多功能附墙支承座 | |
| JP2019011663A (ja) | 法面の施工方法及び移動昇降式足場 | |
| CN211421843U (zh) | 一种钢平台吊点承重梁 | |
| KR102086828B1 (ko) | 건축용 슬라이딩슈 | |
| JP7278863B2 (ja) | 昇降式足場の設置方法 | |
| KR101233539B1 (ko) | 리프트 유닛 | |
| KR101285426B1 (ko) | 수평 이동 유닛 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20170109 Year of fee payment: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20180108 Year of fee payment: 6 |
|
| FPAY | Annual fee payment |
Payment date: 20190211 Year of fee payment: 7 |
|
| FPAY | Annual fee payment |
Payment date: 20200128 Year of fee payment: 8 |