KR20110036741A - 마이크로자이로스코프 - Google Patents
마이크로자이로스코프 Download PDFInfo
- Publication number
- KR20110036741A KR20110036741A KR1020117001949A KR20117001949A KR20110036741A KR 20110036741 A KR20110036741 A KR 20110036741A KR 1020117001949 A KR1020117001949 A KR 1020117001949A KR 20117001949 A KR20117001949 A KR 20117001949A KR 20110036741 A KR20110036741 A KR 20110036741A
- Authority
- KR
- South Korea
- Prior art keywords
- masses
- anchor
- springs
- vibrating
- substrate
- Prior art date
Links
- 239000000758 substrate Substances 0.000 claims abstract description 15
- 238000000034 method Methods 0.000 claims description 13
- 230000000763 evoking effect Effects 0.000 claims 1
- 230000010355 oscillation Effects 0.000 claims 1
- 238000013461 design Methods 0.000 description 18
- 238000004519 manufacturing process Methods 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 210000001520 comb Anatomy 0.000 description 1
- 230000001808 coupling effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5705—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using masses driven in reciprocating rotary motion about an axis
- G01C19/5712—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using masses driven in reciprocating rotary motion about an axis the devices involving a micromechanical structure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B7/00—Microstructural systems; Auxiliary parts of microstructural devices or systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
- G01C19/5733—Structural details or topology
- G01C19/574—Structural details or topology the devices having two sensing masses in anti-phase motion
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Gyroscopes (AREA)
Abstract
본 발명은 x, y, z 축 주위의 회전 움직임들을 결정하기 위한 마이크로자이로스코프에 관한 것이다. 적어도 하나의 앵커는 기판에 고정되어 있다. 상기 앵커에 대하여 방사상으로 진동하는 복수의, 특히 4 개의 질량체들은 스프링들에 의해 상기 앵커에 고정되어 있다. 구동 요소들은 상기 기판이 편향될 때 전향력들을 생성하기 위해 상기 x, 또는 y 방향으로 진동하는 방식으로 상기 질량체들 중 적어도 개별적인 질량체들을 진동시키는 데 사용된다. 센서 요소들은 상기 생성된 전향력들로 인한 상기 질량체들의 편향들을 검출하는 데 사용된다. 상기 진동 질량체들은 적어도 하나의 추가의 비진동 질량체에 연결되어 있다. 그러나, 상기 적어도 하나의 추가의 비진동 질량체는 상기 적어도 하나의 앵커 주위로 상기 기판 상의 상기 진동 질량체들과 함께 회전할 수 있다. 추가 센서 요소는 이 추가 질량체에 연관되어 있다.
Description
본 발명은 청구항 1항의 일반 용어에 따른 마이크로자이로스코프에 관한 것이다.
일반적으로, 마이크로자이로스코프는 x, y, z 좌표 시스템의 축 주위로 회전하는 움직임을 결정하는 데 사용된다. 그러므로, 각각의 3 축 중 하나의 축 주위로 시스템의 회전 움직임을 결정하기 위해서는, 이러한 3 개의 마이크로자이로스코프들이 필요하다. 이것들을 제어하고 데이터를 평가하는 데 비용도 많이 들고 시간도 많이 걸린다.
그러므로, 3 축 모두에 대한 회전들을 설정할 수 있는 3차원의 마이크로자이로스코프가 생성될 수 있다. 디.우드(D.Wood) 등은 1996년 기고 " 동시에 3 축 주위를 감지할 수 있는 모놀리딕 실리콘 자이로스코프 (A Monolithic Silicone Gyroscope Capable of Sensing about Three Axes Simultaneously)"에서, 발생되는 전향력(Coriolis force)으로 인한 경사(tilting) 및 회전(rotating) 움직임을 감지할 수 있는 중앙 앵커 주위에 배치된 고리 모양의 진동하는 질량체를 가지는 자이로스코프를 생성할 것을 제안했다. 이것의 단점은 이러한 센서의 생산 및 움직이는 질량체의 구동 모두는 어렵거나 불가능하다는 것이다. 그러므로 디.우드(D.Wood) 등의 설계는 단지 이론적인 것으로 남아 있게 된다.
난-츄안 차이(Nan-Chyuan Tsai)가 작성한 기고 "커플링 효과에 대한 혁신적인 마이크로자이로스코프의 설계와 역학 (Design and Dynamics of an Innovative Microgyroscope against Coupling Effects)"에서, 또한 3D 자이로스코프가 제안되지만, 이것의 단점은 4 개의 움직이는 질량체들 뿐만 아니라 내부 디스크와 외부 링이 있어야 한다는 것이다. 편향(deflections), 특히 내부 디스크의 편향은 어렵게 결정될 수 있을 뿐이다.
그러므로 본 발명의 과제는 합리적인 제조 비용으로 높은 기록 정확도가 가능한 3D 마이크로자이로스코프의 생성이다.
본 과제는 청구항 1항의 특징을 가지는 마이크로자이로스코프에 의해 해결된다. 이것의 장점은 진동 질량체들에 추가하여 앵커에, 간접적으로 어떠한 속도에서든 적어도 하나 이상의 장착된 질량체를 가진다는 데 있다. 전향력에 의해 야기되는 편향은 상기 진동 질량체들 및 추가적인 질량체들에 할당된 센서 요소들에 의해 검출된다. 이들의 흔들림(swing) 및/또는 회전 움직임은 이 방법에 의해 검출된다. 상기 앵커는 별도의 부품으로 또는 일체로 제조될 수 있다. 여러 개의 부품들로 제조되면, 상기 진동 질량체들 모두는 이러한 부분 앵커들 중 하나에 배치될 수 있다. 중요한 것은, 첫번째로, 상기 진동 질량체들이 상기 앵커(들)로 가까이 및 멀리 회전 움직임이 가능하도록 하는 것이고, 두번째로, 상기 앵커 주위로 경사 및 회전 움직임이 가능하도록 하는 것이다. 이 결과, 한편으로는 상기 진동 질량체들은 구동 질량체들로 작동할 수 있고, 다른 한편으로는 상기 개별적인 질량체들로의 움직임은 상기 전향력 때문에 전달될 수 있다. 이것은 x, y 또는 z 축에 대응하여 할당된 센서 요소들에 의한 각 축 주위로의 자이로스코프의 회전(즉, 특히 기판의 회전) 검출을 가능하게 한다.
바람직하게 및 어떠한 한정 없이, 상기 진동 질량체들의 편향을 결정하기 위한 센서 요소들은 후자 아래, 다시 말하면, 상기 진동 질량체들과 상기 기판 사이에 배치된다. 이 경우에 있어서, 상기 센서 요소들은, - 용량성 타입이라면, 예를 들어,- 장력의 변화를 통해 상기 진동 질량체들의 편향을 검출할 수 있다. 상기 추가적인 질량체의 회전 움직임을 검출하기 위한 센서 요소는 상기 추가적 질량체에 연결된 용량성 센서들에 의해 또는 상기 선세 요소의 정지 요소까지의 거리의 변화를 결정하는 동등 센서들에 의해 결정될 수 있다.
상기 추가 질량체가 상기 진동 질량체들을 링 또는 프레임으로 둘러싸고 있다면 특히 바람직하다. 이 결과, 상기 진동 질량체의 외부 둘레는 상기 추가 질량체에 의해 고정되고 지지된다. 이 결과는 또한 외부 충격에 견딜 수 있는 안정적인 시스템이다.
상기 추가 질량체가 굴절 스프링들(bending springs)로 상기 기판에 고정된다면, 상기 질량체는 또한 외부에서 상기 시스템에 가해지는 충격을 완화하고 측정 오류를 방지하기 위해 적절하게 지지할 수 있다.
상기 굴절 스프링들이 상기 추가 질량체가 상기 z 축 주위로 회전가능하도록 하면, 그때는 이를 방해하지 않으면서 상기 추가 질량체의 편향에 (상기 추가 질량체가 회전하도록 야기시키는) 개별적인 전향력을 용이하게 전달하는 데 이들이 적합하다.
바람직하게, 하나의 앵커는 4 개의 회전 축들 모두에 있어서 균일한 편향이 가능하도록 중앙에 배치되어야 한다.
상기 진동 질량체들이 중앙 앵커에 고정되어 있다면, 그때는 다시, 3 개의 회전 옵션들 모두의 만족스럽고 균일한 검출을 위해 균일하고 대칭적인 시스템이 주어진다.
본 발명의 특히 바람직한 설계에 있어서, 중앙 디스크는 상기 진동 질량체들과 상기 중앙 앵커 사이에 배치된다. 이 중앙 디스크는 그 위에 배치된 상기 추가 질량체/질량체들뿐만 아니라 상기 진동 질량체들의 경사 및 회전 움직임을 특히 잘 수행할 수 있다. 상기 중앙 디스크가 유니버셜 조인트 같이 상기 앵커에 고정된다면, 그때는 이러한 고정이 상기 질량체들이 x 및 y 축 주위로 흔들리는 것이 가능하도록 한다.
상기 진동 질량체들이 방사상으로 움직일 수 있도록 설계하기 위해서는, 이들을 상기 중앙 디스크에 스프링들로 부착시키거나, 중앙 디스크가 없다면 상기 앵커 및/또는 상기 추가 질량체들에 직접 부가 스프링들로 부착시키는 것이 바람직하다. 그러므로 상기 진동 질량체들은 xy 평면을 따라 전후로 흔들릴 수 있을 것이다. 상기 스프링들은 바람직하게는 상기 진동 질량체들이 z 방향으로 움직이는 것을 방지할 수 있도록, 특히 상기 진동 질량체들이 상기 중앙 디스크에 고정되어 있을 때 이것은 움직임을 허용하는 방식으로 차례로 장착되도록 설계되어야 한다. 상기 스프링들이 z 방향으로 상대적으로 견고하다면, 상기 진동 질량체들의 z 방향으로의 편향은 탄성적으로 장착된 중앙 디스크 및 상기 진동 질량체들에 이 방향으로 단단히 연결된 추가 질량체들에 의해서만 가능하다.
상기 진동 질량체들의 균일한 흔들림을 가능하도록 하기 위해, 동기화 스프링들이 상기 진동 질량체들에 서로 연결되기 위해 바람직하게 제공된다. 상기 동기화 스프링들은 한편으로는 상기 앵커 주위의 둘레 방향으로 소정의 탄성을 허용하여 상기 진동 질량체들이 선형 방사상 움직임에서 어느 정도 서로 분리할 수 있게 한다. 그러나, 다른 한편으로 상기 동기화 스프링들은 상기 진동 질량체들이 동시에 균일하게 안팎으로 흔들리지 못하도록 막는다.
상기 진동 질량체들 및 상기 추가 질량체 및/또는 상기 중앙 디스크가 움직일 수 있는 방식으로 z축 주위에 특히, 적절한 스프링들로 장착된다면, 그때는 상기 진동 질량체들 및 상기 추가 질량체는 적절한 방향으로의 이러한 질량체들의 움직임 만큼 상기 z축에 영향을 주는 전향력으로 인한 회전 움직임을 지시하는 것이 가능하다. 상기 회전 움직임은 그 결과 센서 요소들로 검출되고 평가될 수 있다.
전극들-특히 분기된(forked) 또는 빗(comb) 모양의 전극들-은 바람직하게 상기 진동 질량체들을 구동시키기 위해 제공된다. 이러한 전극들은 상기 진동 질량체들을 자극하여 적절하게 흔들리게 하고 기결정된 주파수를 가지는 목표 흔들림을 야기시킨다.
본 발명의 더 많은 장점들 및 발명과 관련된 다른 개념들은 이하의 실시예들의 설명에서 보여진다.
그러므로 본 발명의 효과는 합리적인 제조 비용으로 기록 정확도가 높을 수 있는 3D 마이크로자이로스코프의 생성이다.
도 1은 본 발명의 가능한 설계의 개략도이다.
도 2는, 도 1에 따른 자이로스코프의 작동 원리를 보여준다.
도 3은, 본 발명의 다른 실시예이다.
도 4는, 도 3에 따른 설계의 구동 구조를 보여준다.
도 5는, 도 3에 따른 설계의 중앙 디스크이다.
도 6은, 도 3에 따른 설계의 외부 프레임이다.
도 2는, 도 1에 따른 자이로스코프의 작동 원리를 보여준다.
도 3은, 본 발명의 다른 실시예이다.
도 4는, 도 3에 따른 설계의 구동 구조를 보여준다.
도 5는, 도 3에 따른 설계의 중앙 디스크이다.
도 6은, 도 3에 따른 설계의 외부 프레임이다.
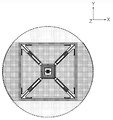
도 1은 본 발명에 따른 마이크로자이로스코프의 가능한 실시예를 보여준다. 4 개의 진동 구동 질량체들(2)은 도면 평면 상에 놓여 있는 기판에 고정된 중앙 앵커(1) 위에 배치되어 있다. 상기 질량체들(2)은 스프링들(3)로 상기 앵커(1)에 부착되어 있어, 상기 스프링들은 먼저 상기 도면 평면 상에서 상기 앵커(1) 주위로 회전하고 상기 도면 평면 상에 놓여 있는 회전 축 주위로도 흔들린다. 상기 스프링들(3)은 여기서 다이아몬드 모양의 기호로 도시되어 있는데, 상기 구동 질량체들(2)이 방사상 방향으로 상기 중앙 앵커(1)에 가까이 및 멀리로 움직이는 것이 가능하게 한다. 따라서, 상기 구동 질량체들은 방사상으로 진동한다. 이것을 달성하기 위해, 구동 요소들(미도시)이 예를 들어 상기 질량체들(2)이 진동 운동을 유지하도록 하는 전극들을 구동하기 위해 제공된다. 상기 구동 질량체들(2)은 추가 질량체, 이 경우에 있어서는 링(4)에 의해 둘러싸여 있다. 이 링(4)은 스프링들(5)로 상기 질량체들(2)에 연결된다. 상기 스프링들(5)은 한편으로는 상기 질량체들(2)의 진동 움직임을 가능한 한 작아지게 방해하는 방식으로 배치되고, 다른 한편으로는 회전 및 흔들림 방향으로 상기 구동 질량체들(2)에 상기 링(4)을 결합시킨다. 상기 구동 질량체들(2) 및 상기 링(4)이 발생되는 전향력 때문에 편향되면, 그때는 상기 진동 질량체들 및 링 모양의 상기 추가 질량체(4) 모두는 서로 결합되어 동일한 편향을 경험하게 된다. 이에 따라, 상기 스프링들(5)은 방사상으로 움직일 수 있으나 다른 방향들로는 여전히 뻣뻣하게 남아 있게 실행된다. 하지만, 다른 설계에 있어서, 스프링들은 상기 진동 질량체들이 경사를 가지지만 상기 추가 질량체 또는 상기 링(4)은 경사를 가지지 않는 것으로 실행될 수 있다. 이 경우에 있어서, 상기 스프링들(5)은 z 방향 주위의 회전 방향을 제외하고는 뻣뻣하지 않고 부드럽다. 여기서, 상기 진동 질량체들은 상기 링(4)에 대해 x 또는 y 축 주위로의 경사 움직임이 있을 때 움직이고, 상기 링(4)은 xy 평면에서 경사 없이 유지된다.
동기화 스프링들(6)은 상기 4 개의 구동 질량체들(2) 사이에 배치되어 있다. 이러한 동기화 스프링들(6)은 상기 구동 질량체들(2)의 동기화된 흔들림을 지원하기 위해 실행된다. 결론적으로, 이것들은 상기 구동 질량체들(2)이 바깥으로 급하게 움직이게 될 때 상기 2 개의 구동 질량체들(2) 사이의 거리가 커지고, 상기 구동 질량체들(2)이 중심 쪽으로 다시 움직이게 될 때 상기 거리가 작아지는 어떤 회전을 허용하게 된다. 다른 한편으로, 상기 동기화 스프링들은 상기 구동 질량체들(2)이 불균일하게 진동하려고 하는 경우에 있어서 뻣뻣함을 유지한다.
상기 거리의 변화를 검출할 수 있는 센서 전극들은 상기 구동 질량체들(2) 아래 상기 링(4) 영역, 특히 그 둘레를 따라 배치되어 있다. 이러한 센서 전극들은, 예를 들어, 상기 중앙 앵커(1) 주위로의 상기 시스템의 회전 움직임 또는 상기 도면 평면 상에 배치된 축들 중 하나의 주위로의 경사 움직임을 검출하는 용량성 효과를 가지는 디스크들로 구성된다.
도 2는 도 1에 도시된 마이크로자이로스코프의 움직임의 다양한 방향들을 보여준다. 상기 중앙 앵커(1)로부터 시작하여, 방사상 방향으로의 상기 4 개의 구동 질량체들(2)의 진동 움직임을 통해 추진력이 발생된다. 상기 구동 질량체들(2)은 상기 도면 평면, 즉, xy 축 방향에서 동기화되어 진동한다. 우선, 상기 스프링들(3, 5, 6)은 상기 구동 질량체들(2)을 안정화시키고, 다음으로, 원활한 진동 움직임을 가능하게 한다. 상기 링(4)은 이러한 초기 상태를 계속 유지한다.
발생된 전향력이 상기 시스템을 x 축 주위로 회전하게 하면, 위와 아래에 도시된 상기 질량체들(2)은 위쪽으로 또는 아래쪽으로 움직이게 될 것이다. 상기 스프링들(5)이 적절하게 실행되면, 즉 상기 구동 질량체들(2) 및 상기 링(4)으로 구성된 전체 시스템이 x 축 주위로 위쪽 또는 아래쪽으로 흔들리게 되면, 상기 링(4)도 이 방향으로 움직이게 될 수 있다. 하지만, 상기 스프링들(5)의 다른 설계에 있어서, 상기 질량체들(2)만 위쪽 및 아래쪽으로 흔들리고, 상기 링(4)은 상기 도면 평면에 흔들림 없이 남아 있을 수 있다. 도면의 중간에 도시된 바와 같이, 전향력이 y 축 주위로 상기 시스템이 회전하도록 만들게 되면, 왼쪽 및 오른쪽에 도시된 상기 질량체(2)는 상기 링(4)과 같이 움직이거나, 상기 스프링들(5)의 적절한 설계에 있어서는 상기 링(4)은 제외하고 y 축 주위로 흔들려 위쪽 또는 아래쪽으로 흔들릴 수 있다.
전향력이 상기 도면 평면으로부터 돌출된 z 축 주위로 상기 시스템이 회전하도록 야기하는 것으로 검출되면, 그때는 상기 시스템은 상기 중앙 앵커(1) 주위로 움직일 것이다. 이러한 일이 발생하면, 상기 질량체들(2) 및 상기 링(4) 모두는 이 방향으로의 상기 스프링들(4)의 뻣뻣함을 통해 z 축 주위로 결합되어 움직이게 된다.
본 발명에 따라 실행되는 시스템을 가지고, 3 개의 x, y, z 회전 축들에서의 상기 마이크로자이로스코프의 움직임들을 상대적으로 용이하게 결정하는 것이 가능하다. 이러한 각각의 편향들은 상기 편향된 질량체들의 영역에 배치된 센서 전극들에 의해 검출된다.
도 3은 본 발명의 다른 실시예, 즉 본 발명에 따른 센서의 대략을 보여준다. 공지된 마이크로-머신 기술을 가지고 제조되는 제안 센서는 3 개 축 x, y, z 주위로의 회전 가속도들을 검출하는 것이 가능한 3D 소형 자이로스코프이다. 본 발명의 주요 특징은 외부 회전 속도들의 영향 하에 움직임이 변하는 4 개의 동기화되어 구동되는 질량체들(2)에 있다. 이러한 움직임의 변화는 용량성 변화를 가지는 전극들에 의해 검출된다. 상기 동기화 질량체들(2)은 연관된 전자부품들의 하나의 단일 구동 제어 루프를 가능하게 하고, 그 결과 시스템은 단순하고 저렴해진다. 평가 전자부품들과 함께 센서 시스템(즉, 마이크로자이로스코프)의 비용을 절감하기 위해, 본 발명에 따른 센서의 설계는 상기 센서 전극들이 쿼리되었을 때 시간을 공유하여 수행될 수 있다. x, y, z 축 주위의 각속도들은 각각의 각속도들이 서로 다른 시간 영역에서 연속적으로 쿼리되기 때문에 동일한 하나의 채널에 의해 판독될 수 있다. 이 결과, 전체 평가 전자부품들은 시스템의 정확도를 희생시키지 않고도 훨씬 더 저렴하게 제조될 수 있다. 이하의 도면들은 상기 센서를 보다 더 자세히 보여준다.
도 4는 센서의 구동 구조를 보여준다. 전극들(미도시)과 같은 구동 요소들은 방사상으로 고주파수로 4 개의 진동 구동 질량체들(2)을 구동시킨다. 모든 구동 질량체는 스프링들(3, 5, 6)에 부착된다. 이 실시예에 있어서, 스프링(3)은 중앙 디스크(후술하기로 함)의 접촉점에 고정되어 있고, 이 접촉점은 상기 질량체(2)에 고정된 상기 스프링(3)의 2 개의 추가 부착점들 사이의 중앙에 배치되어 있다. 이 결과, 방사상 방향으로 소정의 탄성력을 가지는 시스템을 가지게 된다. 이에 더하여, 상기 시스템은 z 축 주위의 회전 움직임에 대하여 탄성적이다. 나아가, 상기 질량체(2)는 "z"의 형식으로 설계된 2 개의 스프링들(5)을 통해 외부 프레임(7)에 고정되어 있다. 이러한 2 개의 스프링들의 설계는 방사상 방향으로 상기 질량체(2)의 탄성적 장착을 야기시켜, 상기 질량체(2)가 진동 방식으로 움직일 수 있도록 해준다. 한편, 상기 스프링들(5)은 상기 x 또는 y 축 주위의 경사 움직임들에 대하여 상기 질량체(2)와 상기 프레임(7)의 견고한 또는 부드러운 결합을 야기시키는 다른 설계를 가질 수 있다. 상기 z 축 주위의 회전 움직임들에 대하여, 상기 질량체들(2) 및 상기 프레임(7)은 대체로 상기 스프링들(5)을 통해 서로 견고하게 연결되어 있다. 상기 x, y, z 축 주위로 상기 시스템을 움직이는 힘들이 발생하면, 그때는 상기 시스템은 상기 질량체(2) 및 상기 프레임(7)에 결합되어, 양자가 동일하게 편향되도록 할 수 있다. 하지만, 상기 뻣뻣한 결합은 또한 상기 z 축 주위의 회전 움직임 하나에만 관여하도록 설계될 수 있다. 다른 설계에서 상기 x 또는 y 축 주위의 움직임이 있다면, 상기 움직이는 질량체들(2)들만 경사를 가지고, 상기 프레임(7)은 경사를 가지지 않도록 설계될 수 있다.
그러므로, 인접하는 질량체들(2)은 진동 방식으로 흔들리도록 허용될 수 있어, 동기화 스프링들(6)에 연결될 수 있다. 이것들은 2 개의 인접하는 질량체들(2) 사이의 간격에 위치하고, 상기 2 개의 인접하는 질량체들(2) 사이의 간격은 상기 질량체들이 상기 센서의 중심에 가까워지거나 멀어짐에 따라, 커지거나 작아질 수 있다. 한편, 상기 동기화 스프링들(6)은 상기 인접하는 질량체들이 비동기적으로 흔들리려고 할 때 안정적이고 견고하다. 결과적으로, 상기 질량체들(2) 중 하나는 상기 인접하는 질량체(2)보다 상기 센서에 더 가까이 갈 수 없다.
상기 4 개의 구동 질량체들(2)은 이중화살표에 의해 지시되는 것과 같이, 흔들린다. 두말할 필요도 없이, 상기 질량체들(2)의 설계는 여기에 도시된 것과 다를 수 있다. 따라서, 상기 질량체들은 다른 모양과 구동 전극들을 가질 수 있고, 특히 예를 들어 통합될 수 있다. 상기 구동 질량체들(2)은 포크, 빗, 평행 전극들 등의 모양을 가진 구동 전극들에 의해 정전기적으로 활성화될 수 있다. 구동 모니터링 전극들은, 상기 질량체들(2)에 가까이 배치될 수 있는데, 상기 구동 움직임을 모니터링한다. 이것들은 빗 또는 평행 전극들 또는 다른 모양을 가지는 것으로 실행될 수 있다. 이러한 전극들은 상기 질량체들(2)의 구동이 기설정된 주파수로 제대로 됐음을 점검하도록 해준다.
판 전극들(8)은 바람직하게 상기 구동 질량체들(2) 아래에 배치되어, 상기 x 또는 y 축 주위의 편향을 검출할 수 있게 해준다.
도 5는 중앙 디스크(10)를 보다 상세히 보여준다. 상기 중앙 디스크(10)는 유니버셜 조인트와 비슷한 구조를 가지고, 동심으로 배치되어 있는 2 개의 프레임들로 구성되어 있다. 이 경우, 상기 중앙 디스크에 위치하는 내부 프레임(1)은 x 방향으로 향한 스프링에 링크되어 있다. 외부 프레임은 y 방향으로 향한 스프링을 통해 상기 내부 프레임에 연결되어 있고, 이 결과, 상기 스프링들의 대응하는 설계에서 상기 외부 프레임은 상기 내부 프레임과 함께 x 축 주위로 보다 용이하게 흔들리는 것이 가능하다. 이것은 상기 질량체들(2) 및 상기 프레임(7) - 이것들은 차례로 상기 중앙 디스크(10), 특히 상기 중앙 디스크(10)의 외부 링에 고정되어 있다 - 이 x 축 또는 y 축 주위로 흔들리는 것이 가능하도록 해준다. 전향력은, 이러한 편향을 야기시킬 수 있는데, 검출될 수 있다. 물론, 상기 질량체들(2)은 상기 중앙 앵커(1)에 다른 방식으로 부착될 수 있다. 예를 들어, 적절하게 설계된 스프링들을 가지고, 상기 중앙 앵커(1)에의 직접 고정이 가능하다.
상기 중앙 디스크(10)는 상기 구동 질량체들(2)의 상기 스프링들(3)을 고정하는 데 사용된다. 상기 고정 스프링들 - 이것으로 상기 외부 프레임은 상기 내부 프레임에 고정되고, 차례로 상기 중앙 앵커(1)에 고정된다 - 이 적절하게 설계되면, 상기 중앙 디스크(10)는 x 축 및 y 축 주위로 흔들릴 수 있다. 이에 더하여, 상기 중앙 디스크(10)는 특히, 외부로부터 상기 시스템에 가해지는 충격에 대하여, 잠재적으로 매우 안정적인 장점을 가진다. 따라서, 이것은 기판을 때려서 오류가 나도록 하는 가벼운 충격에도 편향되기 쉽게 하지 않으면서 상기 질량체들(2) 및 상기 프레임(7)의 안정적인 장착을 보장한다. 상기 중앙 디스크(10)는 상기 중앙 앵커(1)를 통해 상기 센서 기판에 고정된다.
도 6은 상기 센서의 외부 프레임(7)을 보다 상세하게 보여준다. 상기 외부 프레임(7)은 상기 스프링들(5)을 통해 상기 움직이는 질량체들에 고정되어 있다. 상기 프레임(7)은 또한 예를 들어 링(도 1 및 2 참조), 또는 상기 각각의 인접하는 질량체들(2)에 서로 연결되는 링 또는 프레임 세그먼트와 같은 다른 설계를 가질 수 있다. 상기 프레임(10)은 프레임 스프링들(11)로 상기 기판에 부착되고, 이러한 프레임 스프링들(11)은 상기 프레임(10)이 z 축 주위로 회전할 수 있도록 실행된다. 상기 프레임 스프링들은 그러므로 이러한 회전 움직임을 위해 유연하게 만들어진다.
상기 프레임으로부터 이격된 끝단에서, 상기 프레임 스프링들(11)은 상기 스프링 앵커들(12)로 상기 기판에 고정되어 있다. 상기 프레임(7)의 회전은 상기 프레임 둘레(12)를 따라 배치된 프레임 센서 전극들에 의해 검출될 수 있다. 이러한 전극들은 손가락 모양으로 방사상으로 배치될 수 있고, 또한 빗 모양으로 방사상으로 배치되는 것으로 실행될 수 있다.
본 발명은 도시된 실시예들에 한정되는 것은 아니고, 특허 청구항들의 용어 및 상세한 설명의 범위 내에서 많은 다른 설계들이 가능하다. 개별 실시예의 요소들을 조합한 설계도 또한 가능하다.
1 : 중앙 앵커 2 : 구동 질량체들
5 : 결합 스프링들
5 : 결합 스프링들
Claims (13)
- 적어도 하나의 앵커가 고정되어 있는 기판,
상기 앵커에 대하여 특히 4 개의 방사상으로 진동하는 질량체들을 포함하는 다수의 질량체들, 이 경우에 있어서 상기 진동 질량체들은 스프링들에 의해 상기 앵커에 고정되어 있고,
상기 기판이 편향될 때 전향력들을 생성하기 위해, x 또는 y 방향으로 적어도 개별적인 질량체들의 진동 흔들림을 위한 구동 요소들, 및
상기 생성된 전향력들으로 인해 상기 질량체들의 편향들을 검출하기 위한 센서 요소들을 포함하는 x, y, 또는 z 축 주위의 회전 움직임들을 결정하기 위한 마이크로자이로스코프에 있어서,
상기 진동 질량체들이 상기 기판 상에 상기 진동 질량체들과 함께 진동하지 않고 회전가능한 적어도 하나의 추가 질량체에 연결되어 있고,
추가 센서 요소가 상기 추가 질량체에 할당되어 있는 것을 특징으로 하는 마이크로자이로스코프. - 제 1 항에 있어서,
상기 센서 요소들은 상기 진동 질량체들의 편향을 검출하기 위해 상기 진동 질량체들 아래에 배치되는 것을 특징으로 하는 마이크로자이로스코프. - 제 1 항 또는 제 2 항에 있어서,
상기 추가 질량체는 링으로서 상기 진동 질량체들을 둘러싸는 것을 특징으로 하는 마이크로자이로스코프. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 추가 질량체는 굴절 스프링들로 상기 기판에 부착되어 있는 것을 특징으로 하는 마이크로자이로스코프. - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
상기 굴절 스프링들은 상기 추가 질량체가 상기 z 축 주위로 회전가능하도록 하는 것을 특징으로 하는 마이크로자이로스코프. - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
상기 적어도 하나의 앵커는 중앙에 배치되는 것을 특징으로 하는 마이크로자이로스코프. - 제 1 항 내지 제 6 항 중 어느 한 항에 있어서,
상기 진동 질량체들은 중앙 앵커에 고정되어 있는 것을 특징으로 하는 마이크로자이로스코프. - 제 1 항 내지 제 7 항 중 어느 한 항에 있어서,
중앙 디스크는 상기 진동 질량체들과 상기 중앙 앵커 사이에 배치되는 것을 특징으로 하는 마이크로자이로스코프. - 제 1 항 내지 제 8 항 중 어느 한 항에 있어서,
상기 x 및 y 축 주위로 상기 질량체들이 흔들릴 수 있도록 상기 중앙 디스크는 상기 앵커에 유니버셜 조인트 방식으로 고정되어 있는 것을 특징으로 하는 마이크로자이로스코프. - 제 1 항 내지 제 9 항 중 어느 한 항에 있어서,
상기 진동 질량체들은 상기 중앙 디스크 및/또는 추가 질량체에 스프링들로 고정되어 있는 것을 특징으로 하는 마이크로자이로스코프. - 제 1 항 내지 제 10 항 중 어느 한 항에 있어서,
상기 진동 질량체들은 동기화 스프링들로 서로 연결되어 있는 것을 특징으로 하는 마이크로자이로스코프. - 제 1 항 내지 제 11 항 중 어느 한 항에 있어서,
상기 진동 질량체들 및 상기 추가 질량체 및/또는 상기 중앙 디스크는 상기 z 축 주위로 회전되는 것을 특징으로 하는 마이크로자이로스코프. - 제 1 항 내지 제 12 항 중 어느 한 항에 있어서,
상기 진동 질량체들의 상기 구동 요소들은 전극들, 특히 포크 형태의 전극들인 것을 특징으로 하는 마이크로자이로스코프.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102008002748A DE102008002748A1 (de) | 2008-06-27 | 2008-06-27 | Mikro-Gyroskop |
| DE102008002748.0 | 2008-06-27 | ||
| PCT/EP2009/058000 WO2009156485A1 (de) | 2008-06-27 | 2009-06-25 | Mikro-gyroskop |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20110036741A true KR20110036741A (ko) | 2011-04-08 |
| KR101665021B1 KR101665021B1 (ko) | 2016-10-11 |
Family
ID=41130360
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020117001949A KR101665021B1 (ko) | 2008-06-27 | 2009-06-25 | 마이크로자이로스코프 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US8429970B2 (ko) |
| EP (1) | EP2294359B1 (ko) |
| JP (1) | JP5560451B2 (ko) |
| KR (1) | KR101665021B1 (ko) |
| CN (1) | CN102077054B (ko) |
| CA (1) | CA2729111C (ko) |
| DE (1) | DE102008002748A1 (ko) |
| WO (1) | WO2009156485A1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015167066A1 (ko) * | 2014-04-28 | 2015-11-05 | 주식회사 티엘아이 | 링 스프링을 가지는 3축 마이크로 자이로스코프 |
| CN106233091A (zh) * | 2014-04-28 | 2016-12-14 | (株)提尔爱 | 具有环形弹簧的三轴微陀螺仪 |
| KR101717877B1 (ko) * | 2016-01-22 | 2017-03-17 | 한국기술교육대학교 산학협력단 | Z형 커플링 구조를 갖는 일체형 3축 mems 자이로 센서 |
Families Citing this family (66)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110185829A1 (en) * | 2008-08-06 | 2011-08-04 | Pioneer Corporation | Rotational vibration gyro |
| ATE496279T1 (de) * | 2008-11-11 | 2011-02-15 | Fraunhofer Ges Forschung | Mikromechanischer coriolis-drehratensensor |
| IT1391972B1 (it) | 2008-11-26 | 2012-02-02 | St Microelectronics Rousset | Giroscopio microelettromeccanico con movimento di azionamento rotatorio e migliorate caratteristiche elettriche |
| IT1392741B1 (it) | 2008-12-23 | 2012-03-16 | St Microelectronics Rousset | Giroscopio microelettromeccanico con migliorata reiezione di disturbi di accelerazione |
| DE102009001244A1 (de) * | 2009-02-27 | 2010-09-02 | Sensordynamics Ag | Mikro-Gyroskop zur Ermittlung von Rotationsbewegungen um eine x-, y- oder z-Achse |
| DE102009061797B3 (de) * | 2009-02-27 | 2020-12-10 | Hanking Electronics, Ltd. | MEMS-Gyroskop zur Ermittlung von Rotationsbewegungen um eine x-, y-, oder z-Achse |
| DE102009001248B4 (de) | 2009-02-27 | 2020-12-17 | Hanking Electronics, Ltd. | MEMS-Gyroskop zur Ermittlung von Rotationsbewegungen um eine x-, y- oder z-Achse |
| DE102009002066A1 (de) | 2009-03-31 | 2010-10-07 | Sensordynamics Ag | Verfahren zum Erfassen von Beschleunigungen und Drehraten sowie MEMS-Sensor |
| IT1394007B1 (it) | 2009-05-11 | 2012-05-17 | St Microelectronics Rousset | Struttura microelettromeccanica con reiezione migliorata di disturbi di accelerazione |
| US8710599B2 (en) | 2009-08-04 | 2014-04-29 | Fairchild Semiconductor Corporation | Micromachined devices and fabricating the same |
| US9097524B2 (en) | 2009-09-11 | 2015-08-04 | Invensense, Inc. | MEMS device with improved spring system |
| US8534127B2 (en) * | 2009-09-11 | 2013-09-17 | Invensense, Inc. | Extension-mode angular velocity sensor |
| ITTO20091042A1 (it) | 2009-12-24 | 2011-06-25 | St Microelectronics Srl | Giroscopio integrato microelettromeccanico con migliorata struttura di azionamento |
| DE102010028005A1 (de) * | 2010-04-20 | 2011-10-20 | Sensordynamics Ag | Mikro-Gyroskop zur Ermittlung von Bewegungen |
| US8516886B2 (en) | 2010-04-30 | 2013-08-27 | Qualcomm Mems Technologies, Inc. | Micromachined piezoelectric X-Axis gyroscope |
| CN103221333B (zh) | 2010-09-18 | 2017-05-31 | 快捷半导体公司 | 多晶片mems封装 |
| US9455354B2 (en) | 2010-09-18 | 2016-09-27 | Fairchild Semiconductor Corporation | Micromachined 3-axis accelerometer with a single proof-mass |
| WO2012037538A2 (en) | 2010-09-18 | 2012-03-22 | Fairchild Semiconductor Corporation | Micromachined monolithic 6-axis inertial sensor |
| US9278845B2 (en) | 2010-09-18 | 2016-03-08 | Fairchild Semiconductor Corporation | MEMS multi-axis gyroscope Z-axis electrode structure |
| DE112011103124T5 (de) | 2010-09-18 | 2013-12-19 | Fairchild Semiconductor Corporation | Biegelager zum Verringern von Quadratur für mitschwingende mikromechanische Vorrichtungen |
| US9156673B2 (en) | 2010-09-18 | 2015-10-13 | Fairchild Semiconductor Corporation | Packaging to reduce stress on microelectromechanical systems |
| WO2012040245A2 (en) | 2010-09-20 | 2012-03-29 | Fairchild Semiconductor Corporation | Through silicon via with reduced shunt capacitance |
| KR101332701B1 (ko) | 2010-09-20 | 2013-11-25 | 페어차일드 세미컨덕터 코포레이션 | 기준 커패시터를 포함하는 미소 전자기계 압력 센서 |
| JP5652112B2 (ja) * | 2010-10-18 | 2015-01-14 | セイコーエプソン株式会社 | 物理量センサーおよび電子機器 |
| JP5652117B2 (ja) * | 2010-10-21 | 2015-01-14 | セイコーエプソン株式会社 | 物理量センサーおよび電子機器 |
| JP5790915B2 (ja) * | 2011-01-13 | 2015-10-07 | セイコーエプソン株式会社 | 物理量センサー及び電子機器 |
| WO2012131682A1 (en) * | 2011-03-31 | 2012-10-04 | Ramot At Tel-Aviv University Ltd. | Compliant structures with time-varying moment of inertia |
| ITTO20110806A1 (it) | 2011-09-12 | 2013-03-13 | St Microelectronics Srl | Dispositivo microelettromeccanico integrante un giroscopio e un accelerometro |
| EP2573516B1 (en) * | 2011-09-21 | 2013-11-20 | Tronics Microsystems S.A. | A micro-electromechanical gyro device |
| FR2983574B1 (fr) * | 2011-12-06 | 2014-01-10 | Sagem Defense Securite | Capteur angulaire inertiel de type mems equilibre et procede d'equilibrage d'un tel capteur |
| DE102011057081A1 (de) | 2011-12-28 | 2013-07-04 | Maxim Integrated Products, Inc. | Mikro-Drehratensensor und Verfahren zum Betreiben eines Mikro-Drehratensensors |
| US9062972B2 (en) | 2012-01-31 | 2015-06-23 | Fairchild Semiconductor Corporation | MEMS multi-axis accelerometer electrode structure |
| US8978475B2 (en) | 2012-02-01 | 2015-03-17 | Fairchild Semiconductor Corporation | MEMS proof mass with split z-axis portions |
| US9488693B2 (en) | 2012-04-04 | 2016-11-08 | Fairchild Semiconductor Corporation | Self test of MEMS accelerometer with ASICS integrated capacitors |
| EP2647955B8 (en) | 2012-04-05 | 2018-12-19 | Fairchild Semiconductor Corporation | MEMS device quadrature phase shift cancellation |
| KR102058489B1 (ko) | 2012-04-05 | 2019-12-23 | 페어차일드 세미컨덕터 코포레이션 | 멤스 장치 프론트 엔드 전하 증폭기 |
| US9069006B2 (en) | 2012-04-05 | 2015-06-30 | Fairchild Semiconductor Corporation | Self test of MEMS gyroscope with ASICs integrated capacitors |
| EP2647952B1 (en) | 2012-04-05 | 2017-11-15 | Fairchild Semiconductor Corporation | Mems device automatic-gain control loop for mechanical amplitude drive |
| KR101999745B1 (ko) | 2012-04-12 | 2019-10-01 | 페어차일드 세미컨덕터 코포레이션 | 미세 전자 기계 시스템 구동기 |
| US9625272B2 (en) | 2012-04-12 | 2017-04-18 | Fairchild Semiconductor Corporation | MEMS quadrature cancellation and signal demodulation |
| DE102013014881B4 (de) | 2012-09-12 | 2023-05-04 | Fairchild Semiconductor Corporation | Verbesserte Silizium-Durchkontaktierung mit einer Füllung aus mehreren Materialien |
| CN104870939B (zh) * | 2012-12-11 | 2017-08-01 | 株式会社村田制作所 | 角速度检测元件 |
| US9404747B2 (en) | 2013-10-30 | 2016-08-02 | Stmicroelectroncs S.R.L. | Microelectromechanical gyroscope with compensation of quadrature error drift |
| TWI580632B (zh) | 2014-03-14 | 2017-05-01 | 財團法人工業技術研究院 | 具用於旋轉元件之摺疊彈簧的微機電裝置 |
| US10113873B2 (en) * | 2015-05-22 | 2018-10-30 | The Charles Stark Draper Laboratory, Inc. | Whole angle MEMS gyroscope |
| US10317210B2 (en) | 2015-05-22 | 2019-06-11 | The Charles Stark Draper Laboratory, Inc. | Whole angle MEMS gyroscope on hexagonal crystal substrate |
| US20160370180A1 (en) * | 2015-06-17 | 2016-12-22 | Freescale Semiconductor, Inc. | Inertial sensor with couple spring for common mode rejection |
| CN104931032B (zh) * | 2015-06-26 | 2018-04-10 | 清华大学 | 一种单锚定点四质量块mems谐振式陀螺仪 |
| US9609856B1 (en) | 2015-07-01 | 2017-04-04 | Bite Buddy, LLC | Multi-level programmable alerting system |
| US10696541B2 (en) | 2016-05-26 | 2020-06-30 | Honeywell International Inc. | Systems and methods for bias suppression in a non-degenerate MEMS sensor |
| US10371521B2 (en) | 2016-05-26 | 2019-08-06 | Honeywell International Inc. | Systems and methods for a four-mass vibrating MEMS structure |
| CN106441261B (zh) * | 2016-10-21 | 2019-05-10 | 厦门大学 | 一种微机械陀螺仪 |
| US10697994B2 (en) | 2017-02-22 | 2020-06-30 | Semiconductor Components Industries, Llc | Accelerometer techniques to compensate package stress |
| CN107192384B (zh) * | 2017-07-24 | 2022-04-05 | 深迪半导体(绍兴)有限公司 | 一种mems三轴陀螺仪 |
| JP6891932B2 (ja) * | 2018-10-03 | 2021-06-18 | 株式会社村田製作所 | ピエゾz軸ジャイロスコープ |
| JP6849042B2 (ja) | 2018-12-19 | 2021-03-24 | 株式会社村田製作所 | 振動に強い多軸ジャイロスコープ |
| EP3671116B1 (en) * | 2018-12-19 | 2021-11-17 | Murata Manufacturing Co., Ltd. | Synchronized multi-axis gyroscope |
| KR102111568B1 (ko) * | 2019-02-12 | 2020-05-18 | 주식회사 신성씨앤티 | 통합 3축 멤스 자이로스코프 |
| EP3696503B1 (en) * | 2019-02-15 | 2022-10-26 | Murata Manufacturing Co., Ltd. | Vibration-robust multiaxis gyroscope |
| US11060866B2 (en) | 2019-02-15 | 2021-07-13 | Murata Manufacturing Co., Ltd. | Balanced multiaxis gyroscope |
| JP7188311B2 (ja) | 2019-07-31 | 2022-12-13 | セイコーエプソン株式会社 | ジャイロセンサー、電子機器、及び移動体 |
| FR3102240B1 (fr) * | 2019-10-18 | 2021-10-01 | Safran Electronics & Defense | Capteur à compensation mécanique de l’anisotropie de fréquence |
| JP7014267B2 (ja) * | 2020-07-22 | 2022-02-01 | セイコーエプソン株式会社 | 物理量センサーおよび電子機器 |
| CN112683256B (zh) * | 2020-11-30 | 2023-05-30 | 瑞声科技(南京)有限公司 | Mems陀螺仪 |
| CN113607152B (zh) * | 2021-08-30 | 2023-03-17 | 武汉大学 | 一种三轴微机电陀螺仪及其制备封装方法 |
| CN114353776A (zh) * | 2021-12-31 | 2022-04-15 | 瑞声开泰科技(武汉)有限公司 | 一种基于旋转模态的mems陀螺 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1164002A (ja) * | 1997-08-27 | 1999-03-05 | Aisin Seiki Co Ltd | 角速度センサ |
| US6250157B1 (en) * | 1998-06-22 | 2001-06-26 | Aisin Seiki Kabushiki Kaisha | Angular rate sensor |
| US20070194857A1 (en) * | 2004-04-08 | 2007-08-23 | Oliver Schwarzelbach | Angular rate sensor featuring mechanically decoupled oscillation modes |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9621873D0 (en) * | 1996-10-21 | 1996-12-11 | British Tech Group | A solid state,multi-axis gyroscope |
| DE69736630D1 (de) * | 1997-06-19 | 2006-10-19 | St Microelectronics Srl | Hermetisch abgeschlossener Sensor mit beweglicher Mikrostruktur |
| JPH11351878A (ja) * | 1998-06-10 | 1999-12-24 | Japan Aviation Electronics Ind Ltd | 振動型角速度センサ |
| JP2000009473A (ja) * | 1998-06-22 | 2000-01-14 | Tokai Rika Co Ltd | 2軸ヨーレートセンサ及びその製造方法 |
| WO2000029855A1 (en) * | 1998-10-14 | 2000-05-25 | Irvine Sensors Corporation | Multi-element micro-gyro |
| DE19938206A1 (de) * | 1999-08-12 | 2001-02-15 | Bosch Gmbh Robert | Mikromechanischer Drehbeschleunigungssensor |
| JP2002277248A (ja) * | 2001-03-22 | 2002-09-25 | Matsushita Electric Ind Co Ltd | 角速度センサ |
| US20020189351A1 (en) * | 2001-06-14 | 2002-12-19 | Reeds John W. | Angular rate sensor having a sense element constrained to motion about a single axis and flexibly attached to a rotary drive mass |
| US6513380B2 (en) * | 2001-06-19 | 2003-02-04 | Microsensors, Inc. | MEMS sensor with single central anchor and motion-limiting connection geometry |
| US6722197B2 (en) * | 2001-06-19 | 2004-04-20 | Honeywell International Inc. | Coupled micromachined structure |
| EP1617178B1 (en) * | 2004-07-12 | 2017-04-12 | STMicroelectronics Srl | Micro-electro-mechanical structure having electrically insulated regions and manufacturing process thereof |
| US7100446B1 (en) * | 2004-07-20 | 2006-09-05 | The Regents Of The University Of California | Distributed-mass micromachined gyroscopes operated with drive-mode bandwidth enhancement |
| US20080276706A1 (en) * | 2004-09-27 | 2008-11-13 | Conti Temic Microelectronic Gmbh | Rotation Speed Sensor |
| CN101180516B (zh) * | 2005-05-24 | 2011-09-14 | 独立行政法人宇宙航空研究开发机构 | 陀螺仪 |
| JP4874067B2 (ja) * | 2006-02-07 | 2012-02-08 | セイコーインスツル株式会社 | 角速度センサ |
| EP1832841B1 (en) * | 2006-03-10 | 2015-12-30 | STMicroelectronics Srl | Microelectromechanical integrated sensor structure with rotary driving motion |
| JP4310325B2 (ja) * | 2006-05-24 | 2009-08-05 | 日立金属株式会社 | 角速度センサ |
| DE102006046772A1 (de) * | 2006-09-29 | 2008-04-03 | Siemens Ag | Anordnung zur Messung einer Drehrate mit einem Vibrationssensor |
| DE102007017209B4 (de) * | 2007-04-05 | 2014-02-27 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Mikromechanischer Inertialsensor zur Messung von Drehraten |
| JP4631992B2 (ja) * | 2008-01-07 | 2011-02-16 | 株式会社村田製作所 | 角速度センサ |
| FI122397B (fi) * | 2008-04-16 | 2011-12-30 | Vti Technologies Oy | Värähtelevä mikromekaaninen kulmanopeusanturi |
| DE102009001244A1 (de) * | 2009-02-27 | 2010-09-02 | Sensordynamics Ag | Mikro-Gyroskop zur Ermittlung von Rotationsbewegungen um eine x-, y- oder z-Achse |
| US8534127B2 (en) * | 2009-09-11 | 2013-09-17 | Invensense, Inc. | Extension-mode angular velocity sensor |
-
2008
- 2008-06-27 DE DE102008002748A patent/DE102008002748A1/de not_active Withdrawn
-
2009
- 2009-06-25 CN CN200980124429.9A patent/CN102077054B/zh active Active
- 2009-06-25 CA CA2729111A patent/CA2729111C/en active Active
- 2009-06-25 JP JP2011515393A patent/JP5560451B2/ja active Active
- 2009-06-25 EP EP09769333.7A patent/EP2294359B1/de active Active
- 2009-06-25 WO PCT/EP2009/058000 patent/WO2009156485A1/de active Application Filing
- 2009-06-25 US US13/001,126 patent/US8429970B2/en active Active
- 2009-06-25 KR KR1020117001949A patent/KR101665021B1/ko active IP Right Grant
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1164002A (ja) * | 1997-08-27 | 1999-03-05 | Aisin Seiki Co Ltd | 角速度センサ |
| US6250157B1 (en) * | 1998-06-22 | 2001-06-26 | Aisin Seiki Kabushiki Kaisha | Angular rate sensor |
| US20070194857A1 (en) * | 2004-04-08 | 2007-08-23 | Oliver Schwarzelbach | Angular rate sensor featuring mechanically decoupled oscillation modes |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015167066A1 (ko) * | 2014-04-28 | 2015-11-05 | 주식회사 티엘아이 | 링 스프링을 가지는 3축 마이크로 자이로스코프 |
| CN106233091A (zh) * | 2014-04-28 | 2016-12-14 | (株)提尔爱 | 具有环形弹簧的三轴微陀螺仪 |
| US10066941B2 (en) | 2014-04-28 | 2018-09-04 | Tli Inc. | Three-axis micro gyroscope with ring spring |
| CN106233091B (zh) * | 2014-04-28 | 2018-12-28 | (株)提尔爱 | 具有环形弹簧的三轴微陀螺仪 |
| KR101717877B1 (ko) * | 2016-01-22 | 2017-03-17 | 한국기술교육대학교 산학협력단 | Z형 커플링 구조를 갖는 일체형 3축 mems 자이로 센서 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2294359A1 (de) | 2011-03-16 |
| KR101665021B1 (ko) | 2016-10-11 |
| WO2009156485A1 (de) | 2009-12-30 |
| CN102077054A (zh) | 2011-05-25 |
| DE102008002748A1 (de) | 2009-12-31 |
| US20110094301A1 (en) | 2011-04-28 |
| CA2729111C (en) | 2017-03-21 |
| EP2294359B1 (de) | 2017-08-02 |
| JP2011525976A (ja) | 2011-09-29 |
| JP5560451B2 (ja) | 2014-07-30 |
| CA2729111A1 (en) | 2009-12-30 |
| US8429970B2 (en) | 2013-04-30 |
| CN102077054B (zh) | 2013-05-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101665021B1 (ko) | 마이크로자이로스코프 | |
| KR101736293B1 (ko) | x, y 및/또는 z축에 대한 회전 움직임을 검출하기 위한 MEMS 자이로스코프 | |
| KR101812971B1 (ko) | 운동을 감지하기 위한 마이크로 자이로스코프 | |
| JP5532455B2 (ja) | 加速度と回転速度の検出方法およびmemsセンサー | |
| JP6190586B2 (ja) | マイクロ回転速度センサおよびその操作方法 | |
| JP5743338B2 (ja) | 互いに直交する三つの空間軸に関する回転運動を決定するためのマイクロジャイロスコープ | |
| KR101677954B1 (ko) | x 및/또는 y 및 z축에 대한 회전 움직임들을 측정하기 위한 마이크로자이로스코프 | |
| US7155978B2 (en) | Micro angular rate sensor | |
| JP6879391B2 (ja) | 同期フレームを有する多軸ジャイロスコープ | |
| FI126070B (en) | Improved ring gyroscope structure and gyroscope | |
| CN110514190B (zh) | 用于感测角速率的微机电陀螺仪及感测角速率的方法 | |
| JP2010054263A (ja) | 回転振動型ジャイロ | |
| KR101306877B1 (ko) | 내부감지전극을 갖는 튜닝포크형 자이로스코프 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20191001 Year of fee payment: 4 |