KR20100071057A - 작업편 이송장치 - Google Patents
작업편 이송장치 Download PDFInfo
- Publication number
- KR20100071057A KR20100071057A KR1020107007588A KR20107007588A KR20100071057A KR 20100071057 A KR20100071057 A KR 20100071057A KR 1020107007588 A KR1020107007588 A KR 1020107007588A KR 20107007588 A KR20107007588 A KR 20107007588A KR 20100071057 A KR20100071057 A KR 20100071057A
- Authority
- KR
- South Korea
- Prior art keywords
- workpiece
- driving
- drive shaft
- rotary frame
- holders
- Prior art date
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/64—Movable or adjustable work or tool supports characterised by the purpose of the movement
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/22—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material characterised by the process of coating
- C23C14/50—Substrate holders
- C23C14/505—Substrate holders for rotation of the substrates
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C16/00—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes
- C23C16/44—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes characterised by the method of coating
- C23C16/458—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes characterised by the method of coating characterised by the method used for supporting substrates in the reaction chamber
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H21/00—Gearings comprising primarily only links or levers, with or without slides
- F16H21/10—Gearings comprising primarily only links or levers, with or without slides all movement being in, or parallel to, a single plane
- F16H21/12—Gearings comprising primarily only links or levers, with or without slides all movement being in, or parallel to, a single plane for conveying rotary motion
- F16H21/14—Gearings comprising primarily only links or levers, with or without slides all movement being in, or parallel to, a single plane for conveying rotary motion by means of cranks, eccentrics, or like members fixed to one rotary member and guided along tracks on the other
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67721—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations the substrates to be conveyed not being semiconductor wafers or large planar substrates, e.g. chips, lead frames
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Materials Engineering (AREA)
- Metallurgy (AREA)
- Organic Chemistry (AREA)
- General Engineering & Computer Science (AREA)
- General Chemical & Material Sciences (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- General Physics & Mathematics (AREA)
- Power Engineering (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Physics & Mathematics (AREA)
- Retarders (AREA)
- Gear Transmission (AREA)
- Grinding Of Cylindrical And Plane Surfaces (AREA)
- Electrical Discharge Machining, Electrochemical Machining, And Combined Machining (AREA)
- Mechanical Treatment Of Semiconductor (AREA)
- Finish Polishing, Edge Sharpening, And Grinding By Specific Grinding Devices (AREA)
- Agricultural Machines (AREA)
- Soil Working Implements (AREA)
- Specific Conveyance Elements (AREA)
- Physical Vapour Deposition (AREA)
Abstract
작업편 이송기(2)는 로타리 프레임(3) 및 구동부(22)를 포함하며, 이 둘은 구동축(4) 주위를 회전한다. 로타리 프레임(3)은 모터(6)에 의해 구동될 수 있으며, 홀더축들 주위를 회전할 수 있도록 구동축(4) 주위에 배치되는 다수개의 작업편 홀더들(13)을 구비한다. 구동부(22)상에는 고정식 중앙 휠(21) 및 변속부(26)의 링 기어(27)와 맞물리는 피니온(25)이 장착되며, 링 기어(27)의 중앙에는 구동축(4)으로부터 일정거리 편심된 출력점(29)이 놓인다. 작업편 홀더들(13)의 구동핀들(19)이 그곳을 통하여 돌출하는 변속부(26)상의 구동 개구부(28)들 역시 홀더축들로부터 일정거리 편심되어 있다. 로타리 프레임(3)이 회전하면, 구동부(22)가 구동축(4) 주위를 회전하며 로타리 프레임(3)과 동시에 회전하는 변속부(26)에 추가적으로 편심운동을 부여하여 출력점(29)이 구동축(4) 주위에 원을 그리며, 그 결과 작업편 홀더들(13)의 대응하는 회전이 발생한다.
Description
본 발명은 청구항 제1항의 전제부에 따른 작업편 이송장치에 관한 것이다. 이러한 장치들은 작업편들(workpieces)의 처리 공정, 특히 이러한 작업편들을 코팅하는 진공장비에 사용된다.
WO 2007/025 397 A1은 일반적 타입의 작업편 이송장치를 개시하며, 여기에서 변속부는 변속부상의 대응하는 리세스(recess)에 의해 밀착되어 둘러싸인 회전축에 편심적으로 결합된 구동 디스크에 의해 이루어진다. 작업편들의 회전과 로타리 프레임의 회전 사이의 변속비에 영향을 주는 것은 구동 디스크의 운동을 직접 제어하는 보조기어 세트를 통해서만 가능하다.
또 다른 작업편 이송장치가 EP 1 153 155 A1을 통하여 공지되어 있다. 이 경우에는 로타리 프레임들 상에 회전 가능하게 장착된 작업편 홀더들은, 각 경우에 있어서 베이스 프레임에 대하여 비틀림적으로 강성이며(torsionally rigid) 로타리 프레임의 구동축을 동축상으로(coaxially) 둘러싸는 링 기어와 작업편 홀더상의 치차형 휠이 맞물려 회전한다. 이러한 공지된 작업편 이송장치는 상대적으로 복잡한 구조를 가진다. 변속비는 오직 매우 좁은 범위 내에서만 선택 가능하다.
DE 198 03 278 A1에 개시된 작업편 이송장치들 중 하나의 경우에는, 작업편의 회전은 상기 작업편 홀더들과 일시적으로 맞물리며 베이스 프레임에 고정되는 구동기들(drivers)에 의해 영향을 받는다. 이 경우, 회전은 간헐적이며 이는 통상 그 자체로 좋지 않으며 작업편들의 품질, 특히 코팅이 다수의 매우 얇은 층으로 이루어지는 경우에 나쁜 영향을 미칠 수 있다.
DE 103 08 471 A1은 작업편 이송기들이 로타리 프레임상에서 다수의 동일한 축을 가지는 링상에 배치된다. 링의 각 작업편 이송기는 로타리 프레임상의 고정식 중앙휠과 맞물리는 중간기어 세트에 의하여 회전하게 된다. 링에 속하는 작업편 이송기들은 하나의 회전이 나머지 작업편 이송기들에 전달되도록 서로 연결되어 있다.
본 발명의 목적은, 간단한 구조와 신뢰성을 가지며 간단한 방법으로 변속비를 조절할 수 있는 범용적 타입의 작업편 이송장치를 제공하는 것이다. 본 발명의 이러한 목적은 청구항 제1항의 특징부의 구성에 의하여 구현된다.
본 발명은 작업편 홀더들의 구동이 매우 간단하며, 그럼에도 불구하고 상당히 넓은 범위에서 변속비를 선택할 수 있게 한다.
본 발명은 다음의 도면을 참조하여 더욱 완전하게 설명된다.
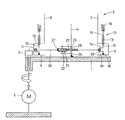
도 1은 제1 구현예에 따른 본 발명의 작업편 이송 장치의 축 분분에 대한 개략적인 단면도이다.
도 2는 도 1의 상세도이다.
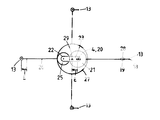
도 3은 도 2의 평면도이다.
도 4는 본 발명에 따른 작업편 이송 장치의 일부 부분을 절개한 사시도이다.
도 5는 본 발명에 따른 작업편 이송 장치의 일부 부분에 대한 확대 평면도이다.
도 1은 제1 구현예에 따른 본 발명의 작업편 이송 장치의 축 분분에 대한 개략적인 단면도이다.
도 2는 도 1의 상세도이다.
도 3은 도 2의 평면도이다.
도 4는 본 발명에 따른 작업편 이송 장치의 일부 부분을 절개한 사시도이다.
도 5는 본 발명에 따른 작업편 이송 장치의 일부 부분에 대한 확대 평면도이다.
본 발명의 바람직한 구현예에 따른 작업편 이송장치에 따르면(도 1), 수직 구동축(4) 주위를 회전하도록 베이스 프레임(1)상에 장착되며, 모터(6)에 의해 구동되는 치차형 휠(toothed wheel, 7)과 맞물리는 링 기어(5)를 그 하단 외부에 구비하는 로타리 프레임(3)을 가지는 작업편 이송기(2)가 고정된 베이스 프레임(1) 위에 배치된다. 로타리 프레임(3)은 구동축(4)에 대하여 대략 회전적으로 대칭이고 구동축(4)을 따라서 연속적인 프로젝션들(projections)이 그 사이에 위치하는 중앙의 관부들(central tubular portions, 8)을 구비하는 폐쇄된 하우징으로 이루어지며(도 1에서는 단지 하단부만 도시되었으며, 도 4 참조), 프로젝션들 각각은 바닥부(9), 커버(10) 및 관부들(8)에 대하여 동축선상에 있는 외부 링(11)으로 구성되며, 상기 외부 링(11)은 바닥부(9)의 외부 엣지(edge)에 결합되며, 커버(10)의 외부 엣지 위로 다소간 돌출한다.
로타리 프레임(3)은 구동축(4)을 둘러싸는 써클(circle) 위로 동일한 높이 및 균일한 방법으로 각각 배치되는 작업편 홀더들(13) 그룹(12)을 상기 각각의 프로젝션상에 구비한다. 각각의 작업편 홀더(13)는 구동축(4)에 평행한 홀더 축 주위를 회전하며, 부분적으로 로타리 프레임(3)의 프로젝션 내에 위치하는 베이스(14) 및 작업편(16)을 고정하기 위한 마운트(15)를 포함하며, 상가 마운트(15)는 커버(10)를 관통하여 나오는 축 핀(17)을 통하여 베이스(14)에 결합된다. 베이스(14)는 또한 아래쪽으로 향하는 원추형 팁을 가지는 베어링 핀(18)을 포함하며, 베어링 핀의 축은 축 핀의 경우에서와 같이 홀더 축과 일치하며 바닥부(9)에 회전 가능하게 장착되며, 팁은 대응하는 리세스에 맞물린다. 베어링 핀(18)과 축 핀(17)은 각각 홀더 축과 일정거리 떨어져서 홀더 축에 평행한 구동핀(19)을 포함하는 크랭크-타입의 중간부(intermediate portion)에 의해 결합된다. 베이스는 실질적으로 균일한 단면을 가지는 단순한 휨부(bent part)이다. 설치된 마운트(fitted-on mount, 15)는 원통형의 리세스를 가지며, 상부가 오픈되어 그 안으로 작업편(16) 즉 밀링 헤드가 삽입된다.
베이스 프레임(1)에 비-회전적으로(non-rotatably) 고정된 축은, 외부 치차(outer toothing)를 구비하며 베이스 프레임(1)에 대하여 비틀림 강성을 가지는(torsionally rigid) 중앙휠(21)을 각 그룹들의 높이(level)에서 구비한다(도 2, 3 또한 참조). 각각의 경우에 동일한 높이에는, 중앙휠(21) 위쪽에 배치되는 상부암(23) 및 중앙휠(21) 아래쪽에 배치되는 유사한 하부암(24)을 가지며 구동축(4) 주위를 회전하는 마운트 및 도시된 예에서는 상부암(23) 및 하부암(24) 사이에 장착되며 구동축(4)에 평행한 피니온 축(pinion axis) 주위를 회전하고 그 치차가 중앙휠(21)의 치차와 맞물리는 피니온(25) 만을 포함하며 마운트에 부착되는 중간 기어 세트를 포함하는 구동부(22)가 배치된다.
피니온(25)은 중앙휠(21) 및 구동부(22)와 같은 높이에 배치되는 작업편 이송기들(13) 그룹(12)의 구동핀들(19)에 원형의 중앙 커플링 컷아웃을 가지는 변속부(26)에 의해 결합된다. 상기 컷아웃의 엣지는, 피니온(25)의 치차와 맞물리며 안쪽으로 향하는 링 기어(27)를 구비한다. 또한 바깥쪽으로, 변속부(26)는 각각의 작업편 홀더(13)를 위한 구동 개구부(28)를 가지며, 여기를 통하여 상기 작업편 홀더(13)의 구동핀(19)이 돌출되며 상기 구동핀(19)은 상기 구동 개구부(28)의 엣지에 의해 밀착되어 둘러싸인다. 따라서, 변속부(26)는 각각의 경우에 작업편 홀더들(13)에 회전 가능한 방식으로 연결되며, 구동부(22) 보다 정확하게는 피니온(25)과 맞물린다.
변속부(26) 상의 링 기어(27)의 중앙 지점은 구동축(4)으로부터 편심거리 E 만큼 떨어진 출력점(output point, 29)을 구성한다. 홀더 축으로부터 각 작업편 홀더(13)의 구동축(4)까지의 거리는 동일하게 편심거리 E에 상당한다.
도 2 및 도 3에서 개념적 형상으로만 도시된 변속부(26)는, 상기 커플링 컷아웃을 둘러싸는 내측 링(30) 및 외측 링(31)을 구비하는 평평한 스탬프된 부분으로 이루어질 수 있으며(도 4에는 프로젝션이 도시되었으나, 하우징 부분 및 작업편 이송기들(13) 대부분 및 축(shaft, 20)은 생략되었다), 외측 링에는 본 예시에서는 동일한 수의 작업편 이송기들(13)과 결합하기 위한 66개의 구동 개구부들(28)이 원주상에 걸쳐서 분포한다. 내측 링(30)과 외측 링(31)은 방사상의 스포크들(32)에 의해 연결되며, 스포크들(32)은 예를 들어 구멍들(33)에 의해 약화되어, 각 그룹(12)의 작업편 홀더들(13)의 어느 하나가 장애가 있는 경우에 소정의 파열점(breaking point)을 구성한다.
로타리 프레임(3)이 모터(6)에 의해 구동축(4) 주위를 회전하면, 로타리 프레임(3)에 연결된 작업편 이송기들(13)과 맞물려있는 변속부(26)는 상기 작업편 이송기들(13)을 통하여 동시에 구동된다. 피니온(25)의 치차는 링 기어(27)와 맞물려 있기 때문에, 상기 피니온(25) 역시 회전하게 되어 중앙휠(21)상을 돌게되며, 그 결과 구동부(22)가 변속부(26)에 대하여 회전하게 되고, 길이가 편심거리 E에 상당하며 회전축(rotational axle, 4)을 출력점에 연결하는 벡터의 편심 운동이 이루어지고 벡터는 회전축(4) 주위를 회전한다. 편심운동은 구동핀(19)에 전달되며, 따라서 편심운동 각각의 회전은 작업편 이송기들(13)의 회전을 가져오며, 홀더 축에서 대응하는 구동핀(19)으로 향하는 벡터는 각각의 경우에 있어 상기 전술한 벡터에 대하여 항상 평행하다.
만일 변속부(26)와 구동부(22)의 운동을 베이스 프레임(1)상의 고정된 좌표 시스템을 통하여 살펴보고(이점에 관해서 도 3, 5를 참조, 도 5에서는 커버가 생략됨), 중앙 치차 즉 중앙휠(21) 치차의 톱니수를 ZZ 이라 하고, 변속부(26)의 치차 즉 기어 링 치차의 톱니수를 ZU 라 하면, 변속부(26)의 편심 운동 동안의 회전에 대응하여 구동부(22)가 구동축(4) 주위를 시계 방향으로 회전함에 의하여 즉 UU=1, 로타리 프레임(3)은 시계 방향으로, (1) UD= 1 + ZZ/ZU 로 회전한다. z = ZZ/ZU 이므로, 다음과 같이 성립한다. (1') UD : UU = 1 + z
이것은, 변속부(26)는 한편으로는 시계 방향으로 완전한 회전(full rotation)을 하면서 동시에 다른 한편으로는 중앙휠(21)을 도는 피니온(25)에 의하여 z 회전을 통하여 추가적으로 회전하기 때문이다. 로타리 프레임(3)의 1+z 회전 이후, 구동부(22)의 회전이 따른다. 따라서, 변속비 즉 구동부(22)의 회전 속도와 한편으로는 변속부(26)의 편심 운동 다른 한편으로는 로타리 프레임(3)의 회전 속도 사이의 비율
(2) u = UU/UD = 1/(1+z) 이 얻어진다.
따라서 예를 들어 도 4, 5에서의 예시적 구현예에서와 같이, ZZ = 46 이고 ZU = 60인 경우에 z은 대략 0.77 이며, u는 대략 0.57 이다. 편심운동은 로타리 프레임(3)에 대한 관계에서 뒷쪽으로 이동한다. 회전 속도의 비율은 u-1 이며, 즉 예시적 구현예에서 -0.43이다.
변속비는 오직 z 에만 의존하며, 예를 들어 중앙휠들(21) 및 구동부들(22)을 가지는 축을 교환함으로써 쉽게 변화시킬 수 있다. 따라서, 예를 들어 작은 중앙휠들을 가지는 축이 사용될 수 있으며, 따라서 z은 감소하고 변속비 u는 이에 따라서 증가한다(2). 그러면, 비록 변속비에 영향을 주지는 않지만 변속부의 링기어와의 맞물림은 보다 큰 피니온들이 요구된다. 필요하다면 비록 비용이 더 들어가지만 변속부들은 추가적으로 교환될 수도 있다.
그러나 피니온 대신에, 구동부의 마운트상에 장착되며 서로간에 작동 가능하게 연결되고 그 중 하나는 중앙 치차와 맞물리고 하나는 변속부 치차와 맞물리는 다수의 치차형 휠들을 가지는 보다 복잡한 중간기어 세트를 사용하는 것이 손쉽게 가능하다. 변속비 u도 서로 다른 중간기어 세트들 및/또는 중앙 휠들을 가지는 축을 사용함으로써 작업편 이송기들의 여러 그룹들에 대하여 서로 다르게 설정할 수 있다.
전술한 예시적 구현예들의 구성은 본 발명의 요지를 벗어나지 않는 범위 내에서 변형될 수 있다. 따라서, 중앙 치차는 베이스 프레임에 대하여 비회전적으로 결합될 필요가 없다. 예를 들어, 중앙 휠들을 가지는 축을 베이스 프레임에 대하여 로타리 프레임의 운동에 의하여 구동되는 보조기어 세트를 통하여 결합시킬 수 있으며, 따라서 중앙 치차는 각각의 경우에 회전 운동을 수행한다. 이러한 타입의 보조기어 세트는 예를 들어 WO 2007/025 397 A1에 기재된 바와 같이 구성되고 설치될 수 있다. 이 경우에도 변속비는 전술한 바와 같이 중앙 휠들 및 구동부들을 가지는 축을 교환함으로써 역시 손쉽게 변화시킬 수 있다. 전술한 문헌의 도 10에 예시된 것과 같은 구현예에서는, 본 발명의 구현예에서 기술된 것에 상당하는 다수의 작업편 이송기들이 주축 주위에 배치되며 주축 주위를 베이스 프레임이 모터에 의해 회전할 수 있는데, 반면 로타리 프레임들의 링 기어들은 고정 치차형 휠과 맞물리는 것도 역시 가능하다.
1 : 베이스 프레임(1)(Base frame)
2 : 작업편 이송기(Workpiece carrier)
3 : 로타리 프레임(3)(Rotary frame)
4 : 구동축(4)(Driving axle)
5 : 링 기어(5)(Ring gear)
6 : 모터(Moter)
7 : 치차형 휠(Toothed wheel)
8 : 관부(Tubular portion)
9 : 바닥부(Bottom part)
10 : 커버(Cover)
11 : 외부 링(Outer ring)
12 : 그룹(Group)
13 : 작업편 홀더(Workpiece holder)
14 : 베이스(Base)
15 : 마운트(Mount)
16 : 작업편(Workpiece)
17 : 축핀(17)(Axle pin)
18 : 베어링핀(Bearing pin)
19 : 구동핀(Driving pin)
20 : 축(Shaft)
21 : 중앙 휠(21)(Central wheel)
22 : 구동부(22)(Driving part)
23 : 상부 암(23)(Upper arm)
24 : 하부 암(24)(Lower arm)
25 : 피니온(25)(Pinion)
26 : 변속부(26)(Transmission part)
27 : 링 기어(5)(Ring gear)
28 : 구동 개구부(Driving aperture)
29 : 출력점(Output point)
30 : 내측 링(Inner ring)
31 : 외측 링(Outer ring)
32 : 스포크(Spoke)
33 : 구멍(Hole)
2 : 작업편 이송기(Workpiece carrier)
3 : 로타리 프레임(3)(Rotary frame)
4 : 구동축(4)(Driving axle)
5 : 링 기어(5)(Ring gear)
6 : 모터(Moter)
7 : 치차형 휠(Toothed wheel)
8 : 관부(Tubular portion)
9 : 바닥부(Bottom part)
10 : 커버(Cover)
11 : 외부 링(Outer ring)
12 : 그룹(Group)
13 : 작업편 홀더(Workpiece holder)
14 : 베이스(Base)
15 : 마운트(Mount)
16 : 작업편(Workpiece)
17 : 축핀(17)(Axle pin)
18 : 베어링핀(Bearing pin)
19 : 구동핀(Driving pin)
20 : 축(Shaft)
21 : 중앙 휠(21)(Central wheel)
22 : 구동부(22)(Driving part)
23 : 상부 암(23)(Upper arm)
24 : 하부 암(24)(Lower arm)
25 : 피니온(25)(Pinion)
26 : 변속부(26)(Transmission part)
27 : 링 기어(5)(Ring gear)
28 : 구동 개구부(Driving aperture)
29 : 출력점(Output point)
30 : 내측 링(Inner ring)
31 : 외측 링(Outer ring)
32 : 스포크(Spoke)
33 : 구멍(Hole)
Claims (10)
- 베이스 프레임(base frame, 1)상에 장착되어 구동축(driving axle, 4) 주위를 회전하는 로타리 프레임(rotary frame, 3), 이와 유사하게 로타리 프레임(3)에 관하여 구동축(4) 주위를 회전하는 구동부(driving part, 22), 구동축(4)에서 일정 거리 이격하여 로타리 프레임(3)상에 장착되며 상기 구동축(4)과 평행한 홀더축들 주위를 회전하는 다수의 작업편 홀더들(workpiece holders, 13), 및 한편으로는 구동축(4)에서 편심거리 E 만큼 이격된 출력점(output point, 29) 주위를 회전하도록 구동부(22)와 맞물리며 다른 한편으로는 동일한 편심거리 E 만큼 이격된 구동점(drive point) 주위를 회전하도록 둘 이상의 작업편 홀더들(13)과 결합하는, 로타리 프레임(3)에 관하여 작업편 홀더들(13)을 회전시키기 위한 하나 이상의 강건한(rigid) 변속부(transmission part, 26)를 포함하는 하나 이상의 작업편 이송기(workpiece carrier, 2)를 가지는 작업편 이송 장치에 있어서,
상기 장치는 베이스 프레임(1)상에 장착되며 구동축(4)을 둘러싸는 중앙 치차(central toothing)를 포함하며, 변속부(26)는 출력점(29)을 둘러싸는 변속 치차(transmission toothing)를 가지며, 구동부(22)는 구동축(4) 주위를 회전하는 마운트(mount) 및 상기 마운트상에 배치되며 중앙 치차 및 변속 치차와 맞물리는 중간 기어 세트(intermediate gear set)를 포함하는 것을 특징으로 하는 작업편 이송 장치.
- 제1항에 있어서, 상기 중간 기어 세트는 중앙 치차 및 변속 치차 모두와 맞물리는 피니온(25)으로 이루어지는 것을 특징으로 하는 작업편 이송 장치.
- 제1항 또는 제2항에 있어서, 상기 중앙 치차는 바깥쪽을 향하며, 변속 치차 는 변속부(26)상에 배치되며 안쪽으로 향하는 링 기어(27)로 이루어지는 것을 특징으로 하는 작업편 이송 장치.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 중앙 치차는 베이스 프레임(1)에 비틀림적으로 강성인 방법으로(torsionally rigid manner) 연결되는 것을 특징으로 하는 작업편 이송 장치.
- 제1항 내지 제4항 중 어느 한 항에 있어서, 상기 장치는 중앙 치차를 구성하는 외부 치차(outer toothing)를 가지는 중앙 휠(central wheel)을 포함하는 것을 특징으로 하는 작업편 이송 장치.
- 제1항 내지 제5항 중 어느 한 항에 있어서, 각각의 작업편 홀더(13)는 단면이 원형이며 홀더축에 평행하고 변속부(26)상의 대응하는 구동 개구부(driving aperture, 28)와 결합하는 구동핀(driving pin, 19)을 포함하는 것을 특징으로 하는 작업편 이송 장치.
- 제1항 내지 제6항 중 어느 한 항에 있어서, 상기 로타리 프레임(3)은 각각의 구동부(22)와 변속부(26) 및 구동점이 위치하는 작업편 홀더들(13) 부분을 둘러싸는 폐쇄된 하우징(closed housing)으로 이루어지며, 반면 작업편(16)을 고정하기 위한 마운트(15)를 구비하는 작업편 홀더의 축핀(axle pin, 17)은 하우징을 관통하여 외부로 나오는 것을 특징으로 하는 작업편 이송 장치.
- 제1항 내지 제7항 중 어느 한 항에 있어서, 상기 작업편 이송기(2)는 구동축(4) 주위에서 동일한 높이에 배치되는 작업편 홀더들(13)의 그룹(group, 12) 및 그룹(12)의 모든 작업편 홀더들(13)과 결합하는 변속부(26)를 포함하는 것을 특징으로 하는 작업편 이송 장치.
- 제8항에 있어서, 상기 그룹(12)의 작업편 홀더들(13)은 구동축(4)을 둘러싸는 원(circle) 위에 균일하게 분포되며, 변속부(26)는 그에 대응하는 방법으로 분포하는 구동 개구부들(28)을 가지는 링(ring)을 포함하는 것을 특징으로 하는 작업편 이송 장치.
- 제8항 또는 제9항에 있어서, 작업편 이송기(2)는 구동축(4)을 따라 분포하는 다수의 작업편 홀더들(13)의 그룹들(12)을 포함하는 것을 특징으로 하는 작업편 이송 장치.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP07405302A EP2048263B1 (de) | 2007-10-08 | 2007-10-08 | Werkstückträgereinrichtung |
| EP07405302.6 | 2007-10-08 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20100071057A true KR20100071057A (ko) | 2010-06-28 |
Family
ID=38982780
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020107007588A KR20100071057A (ko) | 2007-10-08 | 2008-10-02 | 작업편 이송장치 |
Country Status (14)
| Country | Link |
|---|---|
| US (2) | US8596626B2 (ko) |
| EP (2) | EP2336387B1 (ko) |
| JP (1) | JP5497647B2 (ko) |
| KR (1) | KR20100071057A (ko) |
| CN (1) | CN101827955B (ko) |
| AT (1) | ATE503858T1 (ko) |
| BR (1) | BRPI0818592A2 (ko) |
| DE (1) | DE502007006849D1 (ko) |
| ES (1) | ES2362016T3 (ko) |
| MX (1) | MX2010003727A (ko) |
| PL (2) | PL2048263T3 (ko) |
| RU (1) | RU2485211C2 (ko) |
| TW (1) | TWI481448B (ko) |
| WO (1) | WO2009046928A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101869401B1 (ko) * | 2018-01-04 | 2018-07-20 | 홍성신 | 초정밀 선반의 공작물 자동 교환장치 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2336387B1 (de) * | 2007-10-08 | 2013-09-04 | Oerlikon Trading AG, Trübbach | Werkstückträgereinrichtung |
| DE102010001218A1 (de) | 2010-01-26 | 2011-07-28 | Esser, Stefan, Dr.-Ing., 52072 | Substratteller und Beschichtungsanlage zum Beschichten von Substraten |
| SG10201601693VA (en) * | 2011-03-17 | 2016-04-28 | Sulzer Metco Ag | Component manipulator for the dynamic positioning of a substrate, coating method, as well as use of a component manipulator |
| EP2788526A2 (en) | 2011-12-08 | 2014-10-15 | Praxair S.T. Technology, Inc. | Multifuntion tooling fixture assembly for use in a coating related operations |
| RU2625698C1 (ru) * | 2016-08-29 | 2017-07-18 | Федеральное государственное унитарное предприятие "Всероссийский научно-исследовательский институт авиационных материалов" (ФГУП "ВИАМ") | Способ нанесения защитных покрытий и устройство для его осуществления |
| CN107740063A (zh) * | 2017-11-16 | 2018-02-27 | 温州卡耐夫电器有限公司 | 真空镀铝设备用工件承载结构 |
| RU2688353C1 (ru) * | 2018-08-09 | 2019-05-21 | Российская Федерация, от имени которой выступает Государственная корпорация по атомной энергии "Росатом" (Госкорпорация "Росатом") | Устройство перемещения и вращения подложкодержателя |
| DE102018126862A1 (de) | 2018-10-26 | 2020-04-30 | Oerlikon Surface Solutions Ag, Pfäffikon | Werkstückträgereinrichtung und Beschichtungsanordnung |
| DE102019110158A1 (de) * | 2019-04-17 | 2020-10-22 | Oerlikon Surface Solutions Ag, Pfäffikon | Werkstückträgereinrichtung |
| CN114008757A (zh) | 2019-05-07 | 2022-02-01 | 欧瑞康表面处理解决方案股份公司普费菲孔 | 用于保持待处理工件的移动式工件承载装置 |
| JP2022541389A (ja) | 2019-07-26 | 2022-09-26 | エリコン サーフェス ソリューションズ アーゲー、 プフェフィコン | Pvdプロセスで使用される円筒状の伸長基材用の固定具 |
| CN114271649B (zh) * | 2021-12-27 | 2022-11-25 | 西南民族大学 | 一种艺术作品展示设备 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU370279A1 (ru) * | 1969-08-21 | 1973-02-15 | УСТРОЙСТВО дл ТРАНСПОРТИРОВКИ и СМЕНЫ ПОДЛОЖЕК в ВАКУУМНЫХ УСТАНОВКАХ | |
| JPH01288652A (ja) * | 1988-05-17 | 1989-11-20 | Komatsu Ltd | 減速機 |
| SU1828669A3 (ru) * | 1990-11-13 | 1995-05-27 | Владимир Васильевич Кульпинов | Устройство для обработки изделий в вакууме |
| DE19803278C2 (de) | 1998-01-29 | 2001-02-01 | Bosch Gmbh Robert | Werkstückträger und dessen Verwendung zur Behandlung und Beschichtung von Werkstücken |
| WO2000036178A1 (de) * | 1998-12-15 | 2000-06-22 | Unaxis Balzers Aktiengesellschaft | Planetensystem-werkstückträger und verfahren zur oberflächenbehandlung von werkstücken |
| US6749764B1 (en) * | 2000-11-14 | 2004-06-15 | Tru-Si Technologies, Inc. | Plasma processing comprising three rotational motions of an article being processed |
| DE10308471B4 (de) | 2003-02-20 | 2005-03-24 | Hensoldt Ag | Beschichtungsanlage zum Beschichten von Substraten für optische Komponenten |
| CN1865495A (zh) * | 2005-05-20 | 2006-11-22 | 中国科学院半导体研究所 | 金属有机物化学气相淀积设备反应室中的公转自转机构 |
| MX2008002382A (es) * | 2005-08-29 | 2008-03-18 | Oerlikon Trading Ag | Dispositivo portador de piezas de trabajo. |
| US7988787B2 (en) * | 2007-08-27 | 2011-08-02 | Caterpillar Inc. | Workpiece support system and method |
| EP2336387B1 (de) * | 2007-10-08 | 2013-09-04 | Oerlikon Trading AG, Trübbach | Werkstückträgereinrichtung |
-
2007
- 2007-10-08 EP EP11405237.6A patent/EP2336387B1/de active Active
- 2007-10-08 ES ES07405302T patent/ES2362016T3/es active Active
- 2007-10-08 PL PL07405302T patent/PL2048263T3/pl unknown
- 2007-10-08 PL PL11405237T patent/PL2336387T3/pl unknown
- 2007-10-08 AT AT07405302T patent/ATE503858T1/de active
- 2007-10-08 EP EP07405302A patent/EP2048263B1/de not_active Not-in-force
- 2007-10-08 DE DE502007006849T patent/DE502007006849D1/de active Active
-
2008
- 2008-10-02 JP JP2010528299A patent/JP5497647B2/ja active Active
- 2008-10-02 MX MX2010003727A patent/MX2010003727A/es active IP Right Grant
- 2008-10-02 CN CN2008801106260A patent/CN101827955B/zh active Active
- 2008-10-02 RU RU2010113596/02A patent/RU2485211C2/ru not_active IP Right Cessation
- 2008-10-02 WO PCT/EP2008/008349 patent/WO2009046928A1/en active Application Filing
- 2008-10-02 BR BRPI0818592A patent/BRPI0818592A2/pt not_active IP Right Cessation
- 2008-10-02 US US12/681,833 patent/US8596626B2/en active Active
- 2008-10-02 KR KR1020107007588A patent/KR20100071057A/ko not_active Application Discontinuation
- 2008-10-06 TW TW097138355A patent/TWI481448B/zh not_active IP Right Cessation
-
2013
- 2013-09-04 US US14/018,118 patent/US8783673B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101869401B1 (ko) * | 2018-01-04 | 2018-07-20 | 홍성신 | 초정밀 선반의 공작물 자동 교환장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| ES2362016T3 (es) | 2011-06-27 |
| WO2009046928A1 (en) | 2009-04-16 |
| EP2336387A1 (de) | 2011-06-22 |
| EP2336387B1 (de) | 2013-09-04 |
| JP5497647B2 (ja) | 2014-05-21 |
| CN101827955B (zh) | 2012-11-07 |
| EP2048263A1 (de) | 2009-04-15 |
| EP2048263B1 (de) | 2011-03-30 |
| RU2485211C2 (ru) | 2013-06-20 |
| PL2336387T3 (pl) | 2014-01-31 |
| US20100270722A1 (en) | 2010-10-28 |
| DE502007006849D1 (de) | 2011-05-12 |
| TW200936249A (en) | 2009-09-01 |
| CN101827955A (zh) | 2010-09-08 |
| JP2011502211A (ja) | 2011-01-20 |
| PL2048263T3 (pl) | 2011-09-30 |
| US8783673B2 (en) | 2014-07-22 |
| ATE503858T1 (de) | 2011-04-15 |
| TWI481448B (zh) | 2015-04-21 |
| BRPI0818592A2 (pt) | 2017-06-13 |
| US8596626B2 (en) | 2013-12-03 |
| US20140008857A1 (en) | 2014-01-09 |
| RU2010113596A (ru) | 2011-11-20 |
| MX2010003727A (es) | 2010-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20100071057A (ko) | 작업편 이송장치 | |
| KR101296928B1 (ko) | 워크피스 캐리어 장치 | |
| JP6535135B2 (ja) | アンテナ伝動装置及びアンテナ | |
| CN101772657B (zh) | 齿轮装置及使用齿轮装置的工业机器人的转动部结构 | |
| US6585620B1 (en) | Reduction apparatus | |
| US5106346A (en) | Planetary gear system with a set of gears, particularly for devices for coating substrates | |
| US20110035889A1 (en) | Device for cleaning vehicle wheels | |
| CN101681083A (zh) | 叶片驱动装置和光学装置 | |
| GB1574876A (en) | Braider mechanism | |
| CN109290951A (zh) | 抛光机 | |
| EP0584589A2 (en) | Seat reclining mechanism | |
| US6497020B2 (en) | Tool support and tool assembly for tool holders of rotationally driven tools | |
| JP4628012B2 (ja) | 傾斜テーブル装置 | |
| KR20200102346A (ko) | 기어 장치 및 캐리어 | |
| KR20080024682A (ko) | 유성기어 장치 및 이를 이용한 이동식 로보트의 감속주행륜 | |
| CN219032345U (zh) | 工件放置组件、转架及镀膜设备 | |
| KR102292513B1 (ko) | 감속기 | |
| KR200435372Y1 (ko) | 유성기어 장치 및 이를 이용한 이동식 로보트의 감속주행륜 | |
| JP2006063391A (ja) | 皮膜形成用ワーク保持装置 | |
| JP2625066B2 (ja) | リクライニング装置 | |
| JP2017032000A (ja) | 減速装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |