KR20080098709A - 웨이퍼 이송 장치 - Google Patents
웨이퍼 이송 장치 Download PDFInfo
- Publication number
- KR20080098709A KR20080098709A KR1020070043894A KR20070043894A KR20080098709A KR 20080098709 A KR20080098709 A KR 20080098709A KR 1020070043894 A KR1020070043894 A KR 1020070043894A KR 20070043894 A KR20070043894 A KR 20070043894A KR 20080098709 A KR20080098709 A KR 20080098709A
- Authority
- KR
- South Korea
- Prior art keywords
- wafer
- transfer
- chamber
- sensor
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/33—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations into and out of processing chamber
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/04—Apparatus for manufacture or treatment
- H10P72/0451—Apparatus for manufacturing or treating in a plurality of work-stations
- H10P72/0464—Apparatus for manufacturing or treating in a plurality of work-stations characterised by the construction of the transfer chamber
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/06—Apparatus for monitoring, sorting, marking, testing or measuring
- H10P72/0606—Position monitoring, e.g. misposition detection or presence detection
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/76—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches
- H10P72/7602—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a robot blade or gripped by a gripper for conveyance
Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
Description
Claims (4)
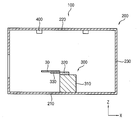
- 웨이퍼를 공정 챔버로 이송하기 위한 공간을 제공하는 이송 챔버;상기 이송 챔버 내부에 구비되며, 상기 웨이퍼를 상기 공정 챔버로 이송하거나 상기 공정 챔버로부터 반송하기 위한 이송부; 및상기 이송부의 회전 반경이 이루는 영역에 대응하는 상기 이송 챔버에 배치되며, 상기 이송부에 상기 웨이퍼가 존재하는지 여부를 감지하는 센서부를 포함하는 웨이퍼 이송 장치.
- 제1항에 있어서, 상기 센서부는 상기 웨이퍼의 상부 중 상기 영역의 가장자리에 대응하는 위치에 배치되는 것을 특징으로 하는 웨이퍼 이송 장치.
- 제1항에 있어서, 상기 센서부는 상기 웨이퍼의 상부 중 상기 이송부의 외곽에 대응하는 위치에 배치되는 것을 특징으로 하는 웨이퍼 이송 장치.
- 제1항에 있어서, 상기 센서부는 상기 웨이퍼의 상부 및 하부 중 어느 하나에 대응되는 상기 이송 챔버의 내벽에 배치되는 것을 특징으로 하는 웨이퍼 이송 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020070043894A KR20080098709A (ko) | 2007-05-07 | 2007-05-07 | 웨이퍼 이송 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020070043894A KR20080098709A (ko) | 2007-05-07 | 2007-05-07 | 웨이퍼 이송 장치 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20080098709A true KR20080098709A (ko) | 2008-11-12 |
Family
ID=40285951
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020070043894A Withdrawn KR20080098709A (ko) | 2007-05-07 | 2007-05-07 | 웨이퍼 이송 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20080098709A (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111613557A (zh) * | 2020-06-01 | 2020-09-01 | 厦门通富微电子有限公司 | 一种晶圆处理设备 |
-
2007
- 2007-05-07 KR KR1020070043894A patent/KR20080098709A/ko not_active Withdrawn
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111613557A (zh) * | 2020-06-01 | 2020-09-01 | 厦门通富微电子有限公司 | 一种晶圆处理设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101478401B1 (ko) | 기판 반송 장치의 위치 조정 방법 및 기판 처리 장치 | |
| US8865483B2 (en) | Substrate processing apparatus and substrate processing method | |
| KR101676519B1 (ko) | 기판 반송 장치, 기판 반송 방법 및 기억 매체 | |
| TWI850451B (zh) | 晶圓搬送裝置、及晶圓搬送方法 | |
| CN111788668B (zh) | 基板搬运装置以及基板搬运方法 | |
| KR101769166B1 (ko) | 기판 처리 방법, 그 기판 처리 방법을 실행시키기 위한 프로그램을 기록한 기록 매체, 기판 처리 장치 및 기판 처리 시스템 | |
| TWI517951B (zh) | 機器人系統 | |
| US10340175B2 (en) | Substrate transfer teaching method and substrate processing system | |
| TWI871431B (zh) | 定位裝置、處理系統及定位方法 | |
| CN110729225B (zh) | 晶圆搬运设备与其方法 | |
| TWI635295B (zh) | Probe card carrier | |
| KR20120033226A (ko) | 기판 반송 장치, 기판 반송 방법 및 그 기판 반송 방법을 실행시키기 위한 프로그램을 기록한 기록 매체 | |
| TW202125685A (zh) | 基板處理裝置 | |
| JP5384270B2 (ja) | ローダ | |
| KR20080098709A (ko) | 웨이퍼 이송 장치 | |
| JP2013110444A (ja) | 基板搬送装置の位置調整方法 | |
| KR20230082037A (ko) | 산업용 로봇 | |
| TWI824169B (zh) | 加工裝置 | |
| KR102233465B1 (ko) | 기판반송유닛, 이를 가지는 기판처리장치 및 방법 | |
| KR20100138758A (ko) | 어댑터 유닛 내장 로더실 | |
| KR101021473B1 (ko) | 웨이퍼 정렬-배면 검사장치 | |
| JP7172251B2 (ja) | ロードポート装置 | |
| US12136556B2 (en) | Sonar sensor in processing chamber | |
| CN113035758B (zh) | 腔室装置、晶片输送设备和晶片处理方法 | |
| JP2024112149A (ja) | ロードポート装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PC1203 | Withdrawal of no request for examination |
St.27 status event code: N-1-6-B10-B12-nap-PC1203 |
|
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid | ||
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |