KR101175823B1 - 구동 유닛 - Google Patents
구동 유닛 Download PDFInfo
- Publication number
- KR101175823B1 KR101175823B1 KR1020077001542A KR20077001542A KR101175823B1 KR 101175823 B1 KR101175823 B1 KR 101175823B1 KR 1020077001542 A KR1020077001542 A KR 1020077001542A KR 20077001542 A KR20077001542 A KR 20077001542A KR 101175823 B1 KR101175823 B1 KR 101175823B1
- Authority
- KR
- South Korea
- Prior art keywords
- delete delete
- resonator
- arm
- contact
- passive
- Prior art date
Links
- 230000033001 locomotion Effects 0.000 claims abstract description 145
- 230000005284 excitation Effects 0.000 claims abstract description 95
- 238000000034 method Methods 0.000 claims description 23
- 230000008878 coupling Effects 0.000 claims description 21
- 238000010168 coupling process Methods 0.000 claims description 21
- 238000005859 coupling reaction Methods 0.000 claims description 21
- 230000003287 optical effect Effects 0.000 claims description 12
- 229910052751 metal Inorganic materials 0.000 description 50
- 239000002184 metal Substances 0.000 description 50
- 239000000853 adhesive Substances 0.000 description 22
- 230000001070 adhesive effect Effects 0.000 description 22
- 238000005452 bending Methods 0.000 description 21
- 238000005304 joining Methods 0.000 description 20
- 238000004519 manufacturing process Methods 0.000 description 18
- 239000010410 layer Substances 0.000 description 15
- 230000000694 effects Effects 0.000 description 14
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 12
- 239000000463 material Substances 0.000 description 12
- 238000013461 design Methods 0.000 description 10
- 239000004020 conductor Substances 0.000 description 7
- 239000004033 plastic Substances 0.000 description 7
- 239000000919 ceramic Substances 0.000 description 6
- 229910052759 nickel Inorganic materials 0.000 description 6
- 230000005684 electric field Effects 0.000 description 5
- 239000002245 particle Substances 0.000 description 5
- 206010028980 Neoplasm Diseases 0.000 description 4
- 230000006399 behavior Effects 0.000 description 4
- 201000011510 cancer Diseases 0.000 description 4
- 238000001723 curing Methods 0.000 description 4
- 230000000284 resting effect Effects 0.000 description 4
- 230000007704 transition Effects 0.000 description 4
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 238000009826 distribution Methods 0.000 description 3
- 230000001976 improved effect Effects 0.000 description 3
- 230000001965 increasing effect Effects 0.000 description 3
- 230000010355 oscillation Effects 0.000 description 3
- 230000010287 polarization Effects 0.000 description 3
- 238000004080 punching Methods 0.000 description 3
- 229910052709 silver Inorganic materials 0.000 description 3
- 239000004332 silver Substances 0.000 description 3
- 239000002356 single layer Substances 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 2
- 230000002238 attenuated effect Effects 0.000 description 2
- 238000009833 condensation Methods 0.000 description 2
- 230000005494 condensation Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 239000012634 fragment Substances 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 2
- 238000007493 shaping process Methods 0.000 description 2
- 238000010008 shearing Methods 0.000 description 2
- 238000005476 soldering Methods 0.000 description 2
- 230000008093 supporting effect Effects 0.000 description 2
- 238000009966 trimming Methods 0.000 description 2
- 210000001215 vagina Anatomy 0.000 description 2
- 229910000906 Bronze Inorganic materials 0.000 description 1
- 239000004593 Epoxy Substances 0.000 description 1
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 229910001329 Terfenol-D Inorganic materials 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- NRTOMJZYCJJWKI-UHFFFAOYSA-N Titanium nitride Chemical compound [Ti]#N NRTOMJZYCJJWKI-UHFFFAOYSA-N 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- DMFGNRRURHSENX-UHFFFAOYSA-N beryllium copper Chemical compound [Be].[Cu] DMFGNRRURHSENX-UHFFFAOYSA-N 0.000 description 1
- 239000011230 binding agent Substances 0.000 description 1
- 239000010974 bronze Substances 0.000 description 1
- 229910010293 ceramic material Inorganic materials 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- KUNSUQLRTQLHQQ-UHFFFAOYSA-N copper tin Chemical compound [Cu].[Sn] KUNSUQLRTQLHQQ-UHFFFAOYSA-N 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 239000012777 electrically insulating material Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 229920006332 epoxy adhesive Polymers 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 239000011152 fibreglass Substances 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- -1 for example Chemical class 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000003365 glass fiber Substances 0.000 description 1
- 238000000227 grinding Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000007373 indentation Methods 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 210000003734 kidney Anatomy 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 238000003801 milling Methods 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 238000005121 nitriding Methods 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 229910052697 platinum Inorganic materials 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 238000005245 sintering Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 238000005496 tempering Methods 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 239000013598 vector Substances 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images















































Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/003—Alignment of optical elements
- G02B7/005—Motorised alignment
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/003—Driving devices, e.g. vibrators using longitudinal or radial modes combined with bending modes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0095—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing combined linear and rotary motion, e.g. multi-direction positioners
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/103—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors by pressing one or more vibrators against the rotor
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
본 발명은 수동 부재(1)에 대한 능동 부재(2)의 운동을 위한 구동 유닛에 대한 것으로서, 능동 부재(2)는 공진기(3) 및 공진기(3)의 진동을 가진하기 위한 적어도 하나의 가진 수단(4)을 포함하며, 공진기(3)는 수동 부재(1)에 힘을 가하기 위한 접촉 영역(7)을 포함하며, 능동 부재(2)는 접촉 영역(7)의 진동 운동에 의해 수동 부재(1)에 대해 구동될 수 있다.
공진기(3)는 적어도 2개의 암(6), 바람직하게는 암(6)들의 일 페어(5)를 포함하며, 공진기(3)의 접촉 영역(10)으로부터 연장하는 적어도 2개의 암(6)들은 공진기(3)의 동일 측면에 형성되며, 접촉 영역(7)들은 암(6)들의 외측 단부에서 각각 형성되며, 접촉 영역(7)들은 암 페어(5)의 진동 운동에 의해 서로를 향해 또는 서로로부터 멀어지게 이동 가능하다. 따라서, 능동 부재(2)에 대한 수동 부재(1)의 상대 운동이 실시될 수 있다.
자기장, 공진기, 구동력, 진동, 압전 모터
Description
본 발명은 전기 구동 장치, 특히 압전 구동 장치(piezoelectric drive)의 분야에 대한 것이다. 본 발명은 각 독립항들의 전제부에 따른 구동 유닛, 구동 방법, 구동 유닛을 위한 부품 모듈을 제조하기 위한 제조 방법, 및 광학 부재를 위치시키기 위한 위치 유닛에 대한 것이다.
압전 모터(piezoelectric motor)는 국제 특허 공보 제01/041228호에 개시되어 있으며, 피에조 부재와 접촉 부재를 구비하는 구동 장치는 유연한 방식으로 조립되며 이에 의해 접촉 부재를 통해 또 다른 본체의 구동을 위한 진동으로 설정될 수 있다.
국제 특허 공보 제02/099 844호는 구동 장치를 개시하고 있는데, 여기서 2차원 피에조 부재는 평탄한 공진기(resonator)를 공진기 또는 피에조 부재의 평면에 놓이는 진동으로 가진한다. 이러한 평면에 놓인 공진기의 점감 지속(tapering continuation)은 이러한 평면에 평행한 진동 운동으로 설정되며, 이에 의해 또 다른 본체로 힘을 발휘한다.
국제 특허 공보 제03/036 786호는 모터를 개시하고 있으며, 여기서 피에조 부재는 공진기의 중앙 부품에 배치되며, 중앙 부품을 중심으로 대칭되게 배치된 몇 개의 암(arm)으로 하여금 구동 영역과 함께 진동이 발생하게 한다.
국제 특허 공보 제03/079 462호는 첨단 부재들을 구비한 피에조 구동 장치를 개시하고 있으며, 첨단 부재들 상에 예리한 굴곡부가 형상화되며, 이에 의해 첨단 부재들은 2개의 공진 주파수를 갖는다. 가진 주파수에 따라, 첨단 부재의 일 접촉 영역은 일 방향 또는 다른 방향으로 타원형 경로를 따라 진동하며, 또 다른 본체 상으로 지향된 대응 힘을 가한다. 진동의 가진은 평탄한 피에조 부재에 의해 실시되며 접촉 영역의 운동은 이러한 가진 평면에 평행하게 움직인다.
미국 특허 공보 제6,690,101호는 피에조 구동 장치를 개시하고 있으며, 피에조 부재의 적층부(stack)는 클램핑에 의해 공진기에서 지지된다. 또 다른 부재들은 구동 영역을 갖는 공진기를 구동되는 본체에 대해 위치시키기 위해 필요하다.
미국 특허 공보 제6,323,578호는 회전 가능한 디스크의 표면에 접선 방향으로 작용하는 구동 영역을 구비한 몇 개의 암들을 갖춘 피에조 구동 장치를 개시하고 있으며, 이로 인해 피에조 부재의 평면에 수직한 각각의 암 팁(구동 범위를 갖춘)의 운동을 유발한다.
본 발명의 목적은 단순한 설계 구조를 갖는 최초 언급한 유형의 구동 장치를 제조하는 것이다.
본 발명의 또 다른 목적은 소형화에 특히 적합한 구동 장치를 제공하는 것이다.
본 발명의 또 다른 목적은 무한히 긴 준무한(準無限) 이동 거리뿐만 아니라 짧은 이동 거리를 갖는 선형 구동에 적합한 구동 장치를 제공하는 것이다.
본 발명의 또 다른 목적은 선형 운동과 회전 운동을 혼합하고 및/또는 교번하는 것을 허용하는 구동 장치를 제공하는 것이다.
본 발명의 또 다른 목적은 제조 기술에 대해 호의적인 설계를 허용하는 구동 장치를 제공하는 것이다.
본 발명에 또 다른 목적은 적어도 2개, 바람직하게는 4개의 접촉 영역에 의해 신뢰성 있게 접촉하고 힘을 전달하는 구동 장치를 제공하는 것이다.
본 발명의 또 다른 목적은 구동 부품 또는 피구동 부품의 제조 오차를 간단하게 상쇄하는 구동 장치를 제공하는 것이다.
이러한 목적들은 특허청구범위 개별 독립항의 특징부에 따른 구동 장치, 구동 방법, 구동 유닛을 위한 부품 모듈을 제조하기 위한 제조 방법, 및 광학 부재를 위치시키기 위한 위치 유닛에 의해 달성된다.
따라서, 본 발명에 따른 구동 장치는 적어도 2개의 암, 바람직하게는 암들의 페어를 구비하는 공진기를 포함하며, 공진기의 결합 영역으로부터 진행하는 적어도 2개의 암들은 공진기의 동일 측면에 형성된다. 접촉 영역은 암의 외부 단부에 각각 형성되며, 접촉 영역은 암 페어(arm pair)의 진동 운동에 의해 함께 이동되거나 멀어질 수 있으며, 이에 의해 능동 부재에 대한 수동 부재의 상대 운동이 실행된다.
따라서, 능동 부재는 암 페어의 2 접촉 영역들이 음차(tuning fork) 형태로 형성될 수 있도록 설계되며, 수동 부재의 일부를 둘러싸거나, 또는 수동 부재의 일부에 의해 둘러싸인다. 휴지 상태(idle condition)에서, 바람직하게는 암은 수동 부재에 대한 바이어스(biasing)를 구비하며, 이로 인해 수동 부재를 견고하게 지지한다. 하나의 암 페어의 암들은 수동 부재에 대해 대칭적으로 배치되는 것이 바람직하다.
암 페어의 진동 운동은 암의 기본 진동 모드에 바람직하게 대응하며, 여기서 기본 진동 모드는 능동 부재의 다양한 진동 모드에 대해 최저 주파수를 갖는다.
수동 부재가 견고하게 지지된다면, 능동 부재는 병진식 및/또는 회전식으로 이동될 수 있는 러너(runner)를 형성한다. 러너는 외부 러너로 지칭되며, 하나의 암 페어의 접촉 영역이 수동 부재의 일부를 둘러싼다. 만일 이와 반대라면, 하나의 암 페어의 접촉 영역들은 수동 부재의 일부에 의해 둘러싸이며, 이어서 러너는 내부 러너로 지칭된다. 따라서, 수동 부재는 중공 형상 또는 튜브일 수 있다. 이와 반대로, 물론 수동 부재가 좌표 체계에 대해 고정되고 수동 부재가 이동하는 것도 고려될 수 있다.
공진기는 이차원 부분을 포함한다. 각각의 이들 부분은 보다 두껍게 형성될 수 있으며 및/또는 바람직하게는 2차원 가진 수단(excitation means)을 구비하며, 이에 의해 다른 부분에 비해 단단하다. 이로 인해, 이들 다른 부분들은 굴곡 영역 또는 스프링 영역으로서 역할을 할 수 있다. 암은 이러한 스프링 영역을 통해 공진기의 잔여부에 바람직하게 결합된다. 스프링 영역과, 암의 인접부는 일체로 형성되는 것이 바람직하며, 그로 인해 스프링 영역은 암 또는 공진기 상에 일체로 형성된다. 스프링 영역은 평탄한 결합부의 직선 경계를 따라 연장한다. 이러한 직선 경계의 방향은 스프링 영역의 바람직한 굽힘축에 대응한다. 따라서, 암은 이러한 굽힘축에 대응하는 바람직한 기본 진동 모드를 가지며, 암의 각 질점(material point)은 암 또는 암의 평탄부의 평면에 수직하게 놓일 뿐만 아니라 굽힘축에도 수직한 평면(이하, 기본 진동 평면으로 지칭)에서 움직인다. 따라서, 암의 외부 단부는 서로를 향하고 서로에 대해 멀어지도록 진동한다. 이러한 모드에 따른 고유 주파수 또는 기본 주파수는 스프링 영역의 강성도 및 암의 진동 부품의 질량 분포의 결과로 발생한다. 전체적으로 암의 기본 주파수(모든 진동 모드를 통해)는 암이 진동할 수 있는 최저 주파수이다. 이는 기본 진동에 대응하며, 평탄한 암은 전형적으로 굽힘 진동이다.
기본 진동 평면들은 일반적으로 가진 수단에 대해 평행하거나 비스듬하며, 바람직하게는 가진 수단에 대해 수직한데, 이는 다음의 기재로부터 명백하게 알 수 있다.
하나 이상의 평탄부들은 진동을 가진하기 위한 가진 수단을 구비한다. 각각의 경우에 있어서, 개별 가진 수단은 암 페어의 양 암들에 부착될 수 있거나, 또는 하나의 가진 수단 만이 공진기에, 바람직하게는 암들 사이의 결합 영역에 부착될 수 있다.
본 발명의 바람직한 실시예에 있어서, 가진 수단은 피에조 부재이거나, 자왜 재료(magnetostrictive material)로 제조된다. 가진 수단은 바람직하게는 실질적으로 평탄하고 특히 평면이며, 예를 들어 접합, 피에조 결정의 성장, 또는 LIGA 공법에 의하여 공진기의 평탄하거나 평면 영역에 각각 부착된다. 가진 수단은 가진 수단이 그 평면에 평행한 운동을 가진하는 방식으로 형성된다. 따라서, 가진 수단과 평탄부인 양 부재들의 굽힘은 특히 평탄부와 같은 결합 표면에서 공진기와의 협동에 의해 실행된다. 2 부재들은 바이모르프 가진기를 형성하며, 그로 인해 가진기는 다양한 재료 특성을 갖는 예를 들어 피에조 부재와 비피에조 부재인 2 부재들을 포함한다.
공진기와 가진 수단의 시스템의 진동 특성은 가진 수단의 강성도와 질량에 따라 공진기 그 자체와 비교하여 변화한다. 수동 부재와의 상호 작용은 또 다른 영향을 미친다. 자유 진동은 경도, 바이어스, 마찰 계수, 표면 특성 등에 따라 감쇠된다. 기본적으로, 수동 부재와 접촉하는 능동 부재의 고유 주파수는 감쇠되지 않은 진동에 비해 약간 높다.
본 발명의 바람직한 실시예에 있어서, 암 또는 가지부에 결속된 피에조 부재는 d31-모드에서 작동되는 단층 부재 또는 다층 부재이다. 따라서, 피에조 부재의 하나의 분극 방향은 암의 평면 또는 그 평탄부에 수직하게 놓이며, 피에조 부재 상의 전극들은 암의 평면에 평행하게 이어진다. d31-모드(횡단 모드로 지칭)에 있어서, 피에조 부재의 주운동 방향은 적용된 전압 방향에 수직하게 놓인다. 이와 반대로, 서로에 대해 층을 이루는 하나 이상의 부재들은 d33-모드로 작동될 수 있으며, 분극 방향은 암의 평면에 평행하게 이어지고, 전극들은 암의 평면에 수직하다. d33-모드(종방향 모드라고도 지칭)에 있어서, 피에조 부재의 주운동 방향은 인가된 전압의 방향에 평행하다. 모든 경우에 있어서, 피에조 부재는 교류 전압이 인가되자마자 축소하거나 연장하며, 대응 평면부에서 암을 굽히고 및/또는 연장하고 및/또는 비틀며 암 또는 공진기를 전체적으로 진동하도록 만든다.
기본적으로, 각각의 피에조결정체는 모든 실시예에서 다층 피에조로 대체될 수 있다. 다층 피에조는 더 낮은 전압에서 작동할 수 있으나, 다층 피에조는 제조하기가 더욱 어려우며 이로 인해 고가이다.
암은 자유 단부에 바람직하게는 비대칭 질량 분포를 가지는데, 예를 들어 암이 수동 부재를 향해 굴절되거나 수동 부재의 방향으로 돌출한 돌출 부착물을 갖기 때문이다. 암의 신장에 따라서, 피에조 부재가 부착된 평면 외부에 놓인 이러한 비대칭 질량의 가속화로 인하여, 이러한 질량은 수동 부재를 향해 이동되거나 또는 이것으로부터 멀어진다. 이러한 운동은 전술한 굽힘 운동 또는 바이모르프 효과에 중첩된다.
가진 수단의 연속적인 가진에 따르면, 진동은 암의 평면에 수직할 뿐만 아니라 평행한 암의 단부에서 발생한다. 이들 진동은 가진의 주파수에 따라 서로에 대해 상이한 상 위치를 갖는다. 수동 부재 없이 작동할 때에 상 위치에 따라서, 암의 단부, 특히 암의 단부의 접촉 영역은 양 또는 음의 회전 방향으로 대략적인 타원형 운동을 실시한다. 수동 부재의 존재에 따라서, 타원형 운동은 수동 부재에 의해 제한되며, 수동 부재는 가진 주파수에 따라 일 방향 또는 다른 방향으로 구동된다. 운동의 진폭은 예를 들어 1 마이크로미터, 또는 0.1 마이크로미터 이하의 범위에 있다.
타원형 운동의 기술은 일반적으로 단순하며, 접촉 영역의 질점은 다양한 궤적을 따라 이동하며, 예를 들어 키드니형 방식으로 이동할 수 있다. 수동 부재의 접촉중, 궤적은 불연속부를 가질 수 있으며, 접촉 영역은 몇 차례에 걸쳐 수동 부재를 누르거나 수동 부재를 두드린다.
진동은 정확하게 평면에서 움직이지 않는 경우가 많은데, 이는 공진기 자체의 또 다른 비대칭 때문이고, 공진기 및 가진 수단의 상호 배치 때문이며, 및/또는 또 다른 부품과의 상호 작용 때문이다. 따라서, 개별 질점의 3차원 진동과 대략적인 타원형 운동은 접촉 영역에서 소망한 운동에 접하는 평면상으로의 돌출부와 함께 가시된다. 소망한 운동은 능동 부재에 대한 수동 부재의 안내에 의해 주로 제시된다. 각 경우에 있어서, 운동 성분(벡터로 도시)들은 기계적으로 효과가 있으며, 수동 부재를 구비한 접촉 영역이 접촉하자마자 안내에 따른 허용 가능한 방향으로 움직인다.
따라서, 힘 효과는 암 평면의 외부에서 발생된다. 이로 인해, 암 페어의 평탄부를 배치하는 것이 가능하므로 대응 가진 수단은 서로에 대해 평행하다. 이에 의하여, 매우 공간 절약적인 구조가 가능하게 된다.
휴지 상태에 있어서, 하나의 암 페어의 접촉 영역은 수동 부재에 대한 서로에 대해 대항하는 편향력을 발휘하며, 이에 의해 수동 부재를 견고하게 지지한다. 따라서, 능동 부재와 수동 부재를 통한 비-포지티브 핏(non-positive fit)이 제시되며, 또 다른 부품 또는 장착부는 참여하지 않는다. 공진기와 수동 부재 사이의 힘 또는 모멘트는 정지 상태가 되면 상호 상쇄된다.
본 발명의 또 다른 바람직한 실시예에 있어서, 공진기 및/또는 가진 수단은 전술한 바와 같이 기본 진동 평면의 진동뿐만 아니라 기본 진동 평면에 대략 수직하게 움직이는 진동도 가진될 수 있는 방식으로 설계된다. 이것은 평면 내부의 비대칭 특성을 갖는 설계에 의해 실시되며, 하나의 암의 경우에는, 예를 들어,
- 몇 개의 가진 수단을 동일한 평탄부 상에서 서로 인접하게 배치하며 가진 수단을 다양한 방식으로 작동시키며, 및/또는
- 적어도 하나의 측방향 절개부를 구비한 암, 그로 인해 암 평면에 수직하고 암의 종방향으로 가로지르는 평탄부를 가지며, 및/또는
- 따라서, 암의 평면의 암은 암의 평면에 수직한 관찰 중에 암의 자유 단부의 영역에서 비대칭 압입부 및/또는 비대칭 돌출부를 구비하는 것에 의해 실시된다.
이들 방법 각각은 암의 자유 단부의 운동으로 이어지며, 적합한 가진 주파수가 제시된다면 기본 진동 평면에 수직한 방향으로의 성분을 갖는다. 서로에 대해 대향되게 놓이는 암 페어의 2 개의 암들의 대응 대칭 설계에 따르면, 2 개의 접촉 영역들은 서로에 대해 실질적으로 대칭되게 진동하는 운동을 실시한다. 따라서, 수동 부재는 바람직하게는 대칭되게 회전되며, 운동축과 동일한 그 대칭축은 암 페어의 종방향 축의 방향으로 움직인다. 수동 부재는 접촉 영역의 기술된 운동에 의해 암 페어 또는 능동 부재에 대한 그 축을 중심으로 회전하도록 설정된다. 따라서, 힘 성분은 운동축에 수직한 평면에서 상쇄되는 것이 아니라 운동을 증가시킨다.
기재된 실시예의 단순한 변형예에 있어서, 능동 부재는 예를 들어 서로에 대해 평행하게 결속되며 바람직하게는 평탄한 가진 수단의 대향 측면 상의 2 개의 평탄 사각형 암을 포함한다. 진동의 생성을 위한 가진 수단은 암의 평면에 실질적으로 평행하게 배치된다. 예를 들어, 이를 위해, 피에조 부재는 결합 표면을 통해 암에 제공되고 d31-모드로 작동되어서, 그로 인해 피에조 부재는 이들 결합 표면에 평행하게 주로 진동한다. 이에 의하여, 진동은 무엇보다도 암의 모든 평면에서 가진된다. 하지만, 전술한 바와 같은 특별히 설계된 비대칭이 제시되지 않는다면, 진동은 암 평면에 수직하게 발생한다. 조직적으로 변화하는 가진 주파수에 의해, 그리고 실험에 의하거나 유한요소모델(FEM)에 의한 컴퓨터 분석에 의하여, 수동 부재에 결과적인 구동력을 가하는 진동 모드의 조합을 알 수 있으며, 상기 구동력은 2 개의 암들의 평면에 평행하게 놓인다. 이러한 운동은 주파수에 따라 암의 주 연장 방향의 평면에 놓이거나, 주 연장 방향에 수직으로 또는 비스듬히 놓일 수 있다.
수동 부재에 대한 능동 부재의 회전 운동뿐만 아니라 병진 운동은 회전식 원통형 수동 부재를 갖고서 가능하다. 전술한 바와 같은 암 설계를 갖는 다양한 진동 모드를 가진 주파수의 적절한 선택에 의하여 가진할 수 있다. 진동 모드에 따라서,
- 암의 효과적인 병진 운동 또는 수동 부재에 대한 대응력은 증가하며, 회전 작용력은 일시적인 평균 또는 모멘트를 상쇄하거나, 또는
- 암의 회전 작용 모멘트 및 병진 작용력은 모멘트 또는 일시적인 평균을 상쇄하거나, 또는
- 암의 병진 및 회전 작용 모멘트가 증가하거나, 또는
- 암이 병진뿐만 아니라 전체 회전 효과력도 모멘트 또는 일시적 평균으로 발휘하지 않는다.
따라서, 병진 또는 회전, 또는 혼합된 나선형 운동이 발생한다. 수동 및 능동 부재는 후자의 경우 느슨한 방식으로 서로에 대해 이동될 수 있다.
본 발명의 바람직한 실시예에 있어서, 수동 부재의 하나의 주축은 능동 부재의 대칭축과 일치한다. 바람직하게는, 적어도 2 암들 사이의 결합 영역의 능동 부재는 수동 부재를 수용하기 위한 관통부 또는 개구부를 추가로 포함한다. 따라서, 능동 부재는 한편으로 이러한 개구부에 의해 다른 한편으로 적어도 하나의 암 페어의 접촉 영역에 의해 능동 부재에 대해 장착되며, 추가적인 장착 부재, 안내 부재 또는 지지 부재는 필요하지 않다.
본 발명의 바람직한 실시예에 있어서, 수동 부재는 적어도 하나의 회전 원통형 본체를 포함하며, 그 원통축은 운동축을 한정하며, 운동축은 적어도 하나의 암 페어의 대칭축에 수직으로 이어진다.
이러한 실시예의 제1 변형예에 있어서, 수동 부재는 적어도 하나의 암 페어 사이에 배치되는 회전 원통형 본체를 포함하며, 원통형 단면에 대해 서로 대향되게 놓이는 접촉 영역에서 회전 원통형 본체와 접촉한다. 수동 부재는 접촉 영역의 동일 방향 회전에 의해 구동된다.
이러한 실시예의 제2 변형예에 있어서, 수동 부재는 적어도 하나의 암 페어 사이에 배치되는 2 회전 원통형 본체들을 포함한다. 각각의 경우에 있어서, 2 본체들 중 하나는 이러한 접촉 영역에서 적어도 하나의 암 페어의 암들 중 하나와 각각 접촉하며, 상기 2 회전 원통형 본체들은 이들 암에 의하여 서로에 대해 가압되며, 반대 회전 방향으로 회전될 수 있다. 2 원통들은 접촉 영역의 반대 회전에 의해 구동된다.
본 발명의 바람직한 실시예의 또 다른 그룹에 있어서, 암들의 평면은 서로에 대해 그리고 가진 수단에 대해 실질적으로 평행하다. 구동 장치에 작용하는 접촉 영역들의 진동의 운동 성분은 암들의 평면에 평행한 평면에서 실질적으로 움직이는 것도 바람직하다. 따라서, 특히 평탄한 설계가 가능하며, 공진기는 예를 들어 펀치된 금속 박판 단편으로부터 하나의 평탄하거나 예리한 부품을 포함할 수 있다. 본 발명의 이러한 실시예에 있어서, 능동 부재와 수동 부재 사이의 상대 운동의 운동축은 암들의 전술한 평면 및 바람직하게는 결합 영역의 평면에 평행하게 이어진다.
하지만, 구동에 효과적인 접촉 영역의 진동의 운동 성분들은 암들의 평면에 수직인 평면에서 실질적으로 이동할 수도 있다. 따라서, 본 발명의 또 다른 바람직한 실시예는 능동 부재의 2 신장된 평탄한 암의 주 연장 방향에 실질적으로 수직한 운동 방향을 갖는 수동 부재를 포함하며, 주 연장 방향에 비스듬히, 바람직하게는 암 평면에 대략 적어도 수직하다. 또한, 공진기는 평탄한 금속 박판 부품으로 바람직하게 형성되며, 하나의 암 페어 또는 암 평면과 결합 영역은 동일 평면에 놓인다.
공진기는 일체로서 바람직하게 제조되며 예를 들어 밀링, 전기부식, 형상 펀칭과 굽힘, 분말 재료의 형상 소결 등에 의해 바람직하게 제조된다. 예를 들어 철, 알루미늄, 티타늄, 인청동, 베릴륨 동 등, 또는 세라믹 재료와 같은 금속이 공진기를 위해 바람직하게 선택된다. 금속 공진기는 예를 들어 질화티타늄으로 된 세라믹 경질층을 접촉 영역에서 구비하거나, 세라믹 본체를 구비한다.
공진기 재료는 다음 특징에 따라 선택된다:
- 높은 큐인자(Q-factor), 즉 작은 내부감쇠,
- 우수한 결합계수, 이로 인해 피에조의 동적 에너지가 진동기에 전송될 수 있음,
- 전기 전도성, 왜냐하면 일반적으로 공진기는 하나 이상의 피에조 부재를 위한 전기 접속부로서의 역할을 하기 때문이며,
- 수동 부재에 대한 이상적인 마찰 대응부,
- 산업적 성형 가능성,
- 저렴한 비용.
수동 부재는 전술한 재료들 중 하나로 바람직하게 제조된다. 수동 부재가 소정의 진동 특성을 갖는 것이 요구되지 않으므로, 수동 부재는 플라스틱 또는 예를 들어 플라스틱에 유리 또는 세라믹이 첨가된 플라스틱 복합재료를 포함할 수도 있다.
수동 부재에 대한 요구 사항은 다음과 같다:
- 공진기에 대한 이상적인 마찰 대응부, 이는 최소 마모를 갖는 최대 마찰계수를 의미하며,
- 접촉 지점에서의 공진기의 최적 감쇠, 이로 인해 타원형 운동이 전방 구동으로 변환될 수 있다.
능동 부재뿐만 아니라 수동 부재의 표면은 예를 들어 압연, 질화, 경화 및 템퍼링 등에 의해 바람직하게 경화된다. 바람직하게는, 수동 부재의 전형적인 면적에 비해 약간 넓은 접촉 대응부의 표면은 닦여지는 반면에, 능동 부재의 전형적인 넓이에 비해 작은 접촉 대응부의 표면은 거칠어지거나 구조화된다
본 발명에 다른 바람직한 실시예에 있어서, 본 발명에 따른 구동 장치의 공진기는 금속 박판 형성 및 굽힘에 의하여 2차원 금속 박판 단편으로부터 제조된다. 이를 위해, 예를 들어 하나의 신장 금속 박판 단편의 2 단부들은 서로에 대해 굽혀지며, 이로 인해 2 단부들은 서로 평행하게 움직이거나 암 페어를 형성한다. 바람직하게는, 암에 측방향으로 돌출하는 탭들은 이것에 결합된 각각의 대향 암을 향해 굽혀진다. 결합 부품에서의 암 페어의 강성화는 이에 의해 또 다른 부품들 없이 달성될 수 있다. 본 발명의 다른 변형예에 있어서, 실질적으로 대칭인 2 금속 박판 부품들은 동일한 방향으로 움직이고 지점에서 서로 평행한 평탄한 암들로 굽혀지며, 결합 영역에서 서로에 대해 또는 제3의 본체에 대해 지향되도록 결속된다.
본 발명의 바람직한 실시예에 있어서, 구동 장치는 수동 부재에 작용하는 암 페어를 포함하며, 공진기는 적어도 하나의 평탄부를 포함하며, 적어도 하나의 가진 수단은 적어도 하나의 평탄부에 부착되며, 적어도 하나의 가진 수단은 적어도 하나의 가진 수단의 평면을 한정하며, 암은 이와 유사하게 2차원 방식으로 형성되며, 암의 표면은 평탄부와 가진 수단에 실질적으로 평행하게 이어진다.
따라서, 매우 평탄한 선형 구동 장치를 형성하는 것이 가능하며, 수동 부재의 운동 방향은 구동 장치의 표면의 평면에 놓이거나, 이러한 표면에 수직하거나 비스듬히 놓일 수 있다.
본 발명의 다른 바람직한 실시예에 있어서, 구동 장치는 수동 부재에 작용하는 암 페어를 포함하며, 공진기는 적어도 하나의 평탄부를 포함하며, 적어도 하나의 가진 수단은 적어도 하나의 평탄부에 부착되며, 그 평면에 따른 적어도 하나의 가진 수단은 적어도 하나의 가진 수단의 평면을 한정하며, 접촉 영역의 개별 질점의 운동의 효과적인 구동 성분은 평탄부와 가진 수단에 실질적으로 평행하게 움직인다.
따라서, 제한된 이동 거리를 갖는 평탄한 선형 구동 장치를 형성하는 것이 가능하며, 구동 장치의 운동 방향은 구동 장치의 표면의 평면에 위치한다.
본 발명의 다른 바람직한 실시예에 있어서, 구동 장치는 수동 부재에 작용하는 암 페어를 포함하며, 공진기는 적어도 하나의 평탄부를 포함하며, 여기서 적어도 하나의 가진 수단은 적어도 하나의 평탄부에 부착되며, 그 평면에 따른 적어도 하나의 가진 수단은 적어도 하나의 가진 수단의 평면을 한정하며, 여기서 접촉 영역의 개별 질점의 운동의 효과적인 구동 성분은 가진 수단 또는 평탄부의 평면에 비스듬히, 특히 수직하게 움직인다.
따라서, 매우 간단한 구조를 가지며 실질적으로 무한 이동 거리를 갖는 평탄한 선형 구동 장치를 형성하는 것이 가능하다.
본 발명의 다른 바람직한 실시예에 있어서, 구동 장치는 수동 부재를 통해 서로에 작용하는 적어도 2개의 암들을 포함하며, 여기서 공진기는 실질적으로 일정한 두께를 갖는 평탄하고 국지적으로 예리한 하나의 부품으로 형성된다.
따라서, 매우 간단한 구조를 갖는 평탄한 구동 장치를 형성하는 것이 가능하며, 공진기는 예를 들어 하나의 펀치된 금속 박판 단편을 포함하며, 여기에 가진 수단이 부착되고 수동 부재를 둘러싸고 및/또는 이에 의해 둘러싸인다.
전술한 실시예들의 바람직한 변형예에 있어서, 수동 부재 및 능동 부재는 기초 본체와 피구동체를 통해 서로 탄성적으로 결합된다.
따라서, 수동 부재는 능동 부재에 대해 전체적으로 탄성적으로 배치된다. 제조 중의 오차, 또는 작동 중에 기초 본체와 피구동체 사이의 변위는 이러한 탄성 결합에 의해 상쇄될 수 있다. 탄성 결합은 활성 부재 또는 수동 부재 또는 양측 모두에 형성될 수 있으며, 바람직하게는 이러한 부재의 일부를 갖는 일체로서 형성된다.
능동 부재의 탄성 장착부는 기초 본체로부터 작동 중에 사용되는 공진기의 진동 모드의 진동 노드에 바람직하게 이어지며, 그로 인해 진동은 방해받지 않는 방식으로 낮은 에너지 손실이 가능하다. 장착부가 공진기에 결합되는 영역은 예를 들어 가진 수단의 표면의 중간 또는 가진 수단의 일 측면의 중간에 놓인다.
가진 수단의 중간 영역의 장착부에 따르면, 바람직하게는 장착부가 공진기의 표면 외부로 굴곡되는 공진기 금속 박판 부품의 부분을 포함하며 기초 본체를 결속하기 위해 치고 본체로 이어진다. 따라서, 기초 본체, 장착부 및 공진기는 일체로 형성된다.
본 발명의 또 다른 바람직한 실시예에 있어서, 수동 부재는 그 자체로 탄성적으로 형성된다. 이는 능동 부재의 제1 암의 접촉 영역을 접촉하는 수동 부재의 제1 부재와, 능동 부재의 제2 암의 영역을 접촉하는 수동 부재의 제2 부재가 서로 탄성적으로 배치됨을 의미한다. 접촉 영역의 접촉은 이에 의해 향상되며, 접촉 영역의 마모와 수동 부재 상의 전술한 부재의 마모는 상쇄된다.
본 발명의 또 다른 바람직한 실시예에 있어서, 수동 부재는 공진기에 비해 100 내지 1000배 작은 스프링 상수를 가지며, 공진기의 평면 내의 접촉 영역의 영역에서의 운동에 대해 그리고 운동축에 실질적으로 수직하게 된다.
수동 부재는 일체로서 형성되거나, 또는 바람직하게는 몇 개의 부품들로 형성된다. 따라서, 수동 부재는 접촉 영역으로부터 피구동체로 구동력을 전달하기 위한 적어도 2개의 접촉 영역뿐만 아니라 접촉 부재를 접촉 영역에 대해 반대 방향으로 가압하는 적어도 하나의 스프링 부재를 포함한다.
본 발명의 또 다른 바람직한 실시예에 따르면, 수동 부재는 피구동체에 탄성적으로 결합되며, 이러한 탄성 결합은 구동력을 수용하기 위해 수동 부재의 접촉판과 일체로서 형성되는 것이 바람직하다. 따라서, 탄성 결합은 구동력을 전달하기 위한 방향으로는 단단하고, 그 방향에 수직한 방향으로는 유연한 것이 바람직하다. 따라서, 이러한 영역에서의 오차는 상쇄될 수도 있으나, 그럼에도 불구하고 피구동체로의 운동의 정확한 전달은 결합부의 선택적인 강성도에 의해 가능하다. 피구동체 및/또는 구동 장치의 또 다른 부재는 충격으로 인한 손상을 방지하기 위한 탄성 결합의 운동의 제한부를 포함한다.
능동 부재와 수동 부재 사이의 상대 운동의 운동 방향은 금속 박판 부품의 평면의 방향으로 작용될 필요가 없으나, 이러한 평면에 비스듬히 그리고 여기에 수직하게 움직일 수도 있다. 바람직하게는, 수동 부재의 운동은 안내 수단에 의해 제시된 병진 치수 또는 회전 치수로 제한된다. 따라서, 이러한 운동 방향은 안내 수단에 의해 제한되거나 한정된다. 각각의 경우에 있어서, 접촉 영역에서의 능동 부재의 운동 성분들은 운동에 기여하는 한정된 수치를 따라 움직인다.
본 발명의 또 다른 바람직한 실시예에 있어서, 구동 장치는 서로에 대해 인접하게 배치되고 바람직하게는 서로 평행하게 배치되며, 동일한 수동 부재에 작용하는 적어도 2개의 암 페어를 구비한 적어도 2개의 공진기들을 포함한다. 이것에 따르면, 더욱 증가한 구동력을 달성할 수 있으며, 구동 장치의 개선된 신뢰성을 보장할 수 있다. 바람직하게는, 2 공진기의 진동을 가진하기 위하여, 적어도 하나의 평탄한 가진 수단은 서로에 대해 평행하게 배치되는 2 공진기들 사이에 배치된다. 공진기들 중 적어도 하나는 적어도 하나의 기초 부재를 구비한 가진 수단의 전기 접속을 위한 전기 전도성 장착부를 바람직하게 구비한다. 전도성 장착부와 공진기는 일체로 형성되는 것이 바람직하다. 따라서, 능동 부재의 간단한 샌드위치형 구조가 가능하며, 결합 와이어와 그 접합은 전도성 장착부로 인해 제거될 수 있는데, 이는 접촉이 이동되지 않는 공진기 금속 박판 부품의 위치에서 실시되기 때문이다.
구동 장치는 가진 수단의 전기 접촉을 위해 적어도 하나의 중간 전극을 구비하는 것이 바람직하며, 여기서 적어도 2개의 가진 수단은 2 공진기들 사이에 각각 배치되고, 중간 전극은 2개의 가진 수단들 사이에 각각 배치된다. 이에 따르면, 동일한 전위의 적어도 2개의 공진기를 작동시키는 것이 가능하며, 그로 인해 전기 전도성 수동 부재가 사용될 수 있다. 그렇지 않다면, 수동 부재는 전기적 절연 재료를 포함하며, 적어도 2개의 공진기들은 서로에 대해 전기적으로 절연된다.
바람직하게는 금속 박판의 기초 부재는 2개의 공진기 사이의 전기 접속을 위해 각각의 공진기에 또는 공진기 상에 배정되거나 통합되어 형성되며, 적어도 하나의 기초 부재는 기초 부재의 전기적 접속을 위해 다른 기초 부재를 향해 굴곡된다.
수동 부재의 다음 실시예들은 암 페어를 통해 실시되고 평행하게 배치되는 2개 또는 그 이상의 공진기를 사용하는 것이 바람직하다.
바람직하게는, 수동 부재는 적어도 2개의 접촉판들을 포함하며, 접촉판 각각은 서로에 대해 인접하게 놓인 암들의 접촉 영역에 의해 구동될 수 있다. 2개의 접촉판들은 스프링 부재에 의해 접촉 영역에 대하여 바람직하게 가압되며, 접촉판은 오차를 상쇄하기 위해 스프링 부재에 의해 비틀릴 수 있다.
수동 부재는 능동 부재의 암들 사이에 배치되므로, 스프링은 예를 들어 접촉 부재의 접촉판들을 당긴다. 운동 방향에서 도시된 바와 같이 스프링 힘의 연동 지점은 접촉판의 중간에 놓인다. 따라서, 접촉판은 운동 방향에 평행한 축을 중심으로 회전 가능하며, 이를 위해 지지암은 이러한 회전에 대해 작은 강성도를 갖는다. 따라서, 양 측면의 2개의 접촉판들은 2개의 공진기의 접촉 영역에 대해 가압되며, 3개의 접촉 영역에서의 접촉이 발생한다. 기계적 접촉은 이에 의해 개선되며, 이에 의하여 구동 장치의 구동력과 수명이 개선된다.
접촉 영역의 접촉을 향상시키기 위한 다른 실시예는 이러한 접촉판과 접촉하는 접촉 영역들 사이의 접촉선에 수직하는 축을 중심으로 외부로 또는 내부로 굴곡되는 접촉 영역에 놓인다. 접촉 영역에 대한 접촉판의 자체중심 및 보정 운동은 이로 인해 발생한다.
본 발명에 따른 구동 장치의 제조는 평탄한 부품의 대부분의 부분을 사용하기 위해 매우 단순하며: 실질적으로 평탄한 성분은 서로에 대해 적층되고 결합될 필요가 있다. 결합부는 대부분 전기 전도성이 있으며: 서로에 대해 전기적 및 동전기적 접촉할 부품들은 결합되거나, 전도체가 절연체에 결합되며, 여기서는 기계적 결속만이 중요하다. 이러한 이유로 인해, 특히 이방성 도전율을 갖는 전기 전도성 접합제를 사용하는 것이 바람직하며, 그로 인해 가공 방법에 따라 소정의 방향 및 소정의 위치에서만 전도된다. 이러한 접착제는 예를 들어 금속 볼이 박힌 에폭시 접착제이며, 바람직하게는 표준 크기를 갖는다. 접착제의 경화는 가압된 상태에서 실시되므로, 니켈 볼은 결합될 전도체를 양 측면에서 접촉한다. 전도체는 경화 도중에 접착제의 수축에 의해 서로에 대해 영구적으로 끌어당긴다. 상기 방법에 대한 대안으로서, 절연 접착제에 의해 둘러싸일 수 있는 때에는 전도성 접착제를 도포할 수도 있다. 공진기를 양 측면의 중앙 플라스틱 부품으로 접합하고 및/또는 리벳 체결하는 것도 가능하다.
공진기 금속 박판 단편들은 기초 부재의 영역에서 서로에 대해 굴곡될 수 있으며, 서로에 대해 전기적으로 그리고 기계적으로 결합될 수 있다. 단일 금속 박판 부품으로부터 2개의 공진기를 형성하는 것도 가능하며, 금속 박판 부품은 가진 수단을 중심으로 U 형태로 굴곡되거나, 여기에 가진 수단이 삽입된다.
본 발명의 또 다른 바람직한 실시예에 있어서, 제1 공진기는 완벽하게 펀치되는 것이 아니라 또 다른 펀치 스트립의 부품으로서 이송되며, 각각의 부품들은 조립시에 펀치 스트립에 적용되고 서로에 대해 결합되며 펀치 스트립과 함께 이송된다.
아래의 방법들의 조합은 구동 에너지 및 요구되는 전압을 최소화하기 위함이며,
- 공진기와 피에조와 중간 전극 사이의 가능한 한 얇은 접합층;
- 가능한 한 동일한 공진기들, 즉 동일한 형상, 동일한 펀치 공구, 동일한 기초 재료(금속 박판)의 배치(batch)를 가지며, 그로 인해 적용된 진동 모드의 주파수는 양 공진기를 위해 서로 인접하게 위치하며;
- 중간 전극과 그 전기 접촉부 사이의 가요성 전이 영역;
- 관련된 진동 모드의 진동 노드에 공진기를 장착.
모터를 위한 공급 전압은 이들 모든 방법들을 사용하여 예를 들어 80 V로부터 2.8 V 이하 및 2 V 이하로 줄어들 수 있다. 이로 인하여, 고가의 다층 피에조를 사용하지 않고서 배터리 작동 장치에서 가해지는 바와 같은 낮은 전압으로 가동될 수 있다.
접착제의 탄성계수와 플라스틱 운반체 부재의 탄성계수는, 피에조 부재의 탄성계수와 금속 또는 세라믹으로 된 공진기의 탄성계수에 비해 상당히 낮을 수 있다. 따라서, 상대적으로 유연한 이들 부품들은 진동에 영향을 적게 주며 에너지를 흡수한다.
본 발명에 따른 구동 장치는 소형이며(구동 장치의 길이는 1 내지 2 센티미터의 범위이거나 이보다 작음), 가볍고, 산업적으로 생산 가능하며, 저가이며, 초소형 단계를 갖는 제어된 운동을 허여한다. 또한, 단순한 구조로 인해 매우 튼튼하다.
본 발명에 따른 구동 장치는 소형화된 적용에 매우 적합하며, 예를 들어 광학 포커싱, 줌 및 개구부 장치를 위한 선형 작동기로서 적합하다. 일반적으로, 광학 장치는 매우 바람직한데, 왜냐하면, 수동 부재가 투명 또는 중공 방식으로 형성될 수 있기 때문이다. 이는 광파가 구동 장치의 대칭축에 직접 통과하여 인도되는 것을 허여한다. 예를 들어, 유리섬유 케이블을 갖는 장치, 포커싱 지점의 조절, 포인터를 위한 광학 도파관 등은 바람직하다.
본 발명에 따른 광학 부재를 위치시키기 위한 위치 유닛은, 기초 본체 및 기초 본체에 변위 가능한 지지부를 포함하며, 상기 지지부는 광학 부재를 운반하는데, 여기서 위치 유닛은 본 발명에 따른 구동 유닛을 구비한다. 따라서, 능동 부재는 기초 본체에 바람직하게 결속되며 수동 부재는 지지부에 결속된다.
또 다른 바람직한 장치는 이송대(XY-table)와 같은 위치 시스템일 뿐만 아니라 소형 물체들을 조정하고 영향을 주기 위한 마이크로 조정기이다.
구동 장치는 다이얼 또는 공기 플랩의 구동 장치와 같은 자동차 분야에도 바람직하게 적용될 수 있는데, 이는 구동 장치의 강인함 때문이다.
또 다른 바람직한 실시예들은 특허청구범위 종속항으로부터 유도될 수 있다.
이하에서, 본 발명은 첨부된 도면들을 참조로 하여 바람직한 실시예들에 의해 보다 자세하게 기술된다. 도시된 것은 개략적으로 각각 아래와 같다:
도 1은 본 발명에 따른 구동 장치를 측면도 및 운동축 방향의 도면으로 도시하며;
도 2는 암마다 각각 2개의 피에조 부재를 갖는 구동 장치를 도시하며;
도 3은 동일 방향으로 지향하는 2개의 암 페어를 구비한 구동 장치를 도시하 며;
도 4는 암마다 동일 평면에서 서로 인접하게 배치되는 2 피에조 부재를 구비한 구동 장치를 평면도 및 운동축 방향의 도면으로 도시하며;
도 5는 회전 운동을 가진하기 위해 도 4에 따른 모터의 운동 모드를 도시하며;
도 6은 암의 평면에서의 대칭부를 갖는 구동 장치를 도시하며;
도 7은 평탄한, 사각 수동 부재를 구비한 구동 장치를 도시하며;
도 8은 튜브형 수동 부재를 구비한 구동 장치를 도시하며;
도 9는 내부 러너로서 형성되는 능동 부재를 갖는 구동 장치를 측면도 및 운동축 방향의 도면으로 도시하며;
도 10 내지 도 12는 능동 부재를 결속하기 위한 다양한 변형예를 도시하며;
도 13은 d31 모드의 피에조 부재를 구비한 피에조 모터와, 이러한 피에조 부재와의 접촉을 도시하며;
도 14는 d33 모드의 피에조 부재를 구비한 피에조 모터와, 이러한 피에조 부재와의 접촉을 도시하며;
도 15는 d15 모드의 피에조 부재를 구비한 피에조 모터를 도시하며;
도 16 및 도 17은 다양한 운동 상태의 도 15에 따른 피에조 모터를 도시하며;
도 18은 수동 부재의 바람직한 설계를 도시하며;
도 19 및 도 20은 능동 부재의 바람직한 설계를 도시하며
도 21은 자왜 능동 원칙을 갖는 구동 장치를 도시하며;
도 22는 단편의 굴곡된 공진기를 구비한 구동 장치를 도시하며;
도 23은 하나의 가진 수단만을 구비한 구동 장치를 도시하며;
도 24는 반대 방향을 지향하는 2개의 암 페어를 구비한 구동 장치를 도시하며;
도 25 내지 도 27은 굴곡된 금속 박판 부품의 능동 부재들을 다양한 도면으로 도시하며;
도 28은 암 페어의 대칭축에 수직하게 배치되는 수동 부재로서의 원통을 구비한 구동 장치를 도시하며;
도 29는 반대 방향으로 회전 가능한 2개의 원통을 포함하는 수동 부재를 구비한 구동 장치를 도시하며;
도 30 내지 도 32는 도 1에 따른 능동 부재의 다양한 진동 모드를 도시하며;
도 33은 가진 주파수에 영향을 받지 않는 구동력 또는 모멘트의 진로를 도시하며;
도 34는 피에조 모터를 가진하기 위한 회로의 회로 구성도를 도시하며;
도 35 및 도 36은 본 발명의 또 다른 바람직한 실시예를 도시하며;
도 37은 렌즈를 위치시키기 위한 위치 유닛을 도시하며;
도 38은 일체로 통합 형성된 장착부를 구비하며 전기 접촉을 하는 공진기를 도시하며;
도 39는 부분적으로 조립된 위치 유닛의 능동 부품 모듈을 도시하며;
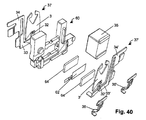
도 40은 능동 부품 모듈의 분해도를 도시하며;
도 41은 본 발명에 따른 수동 부재를 도시하며;
도 42는 능동 부품 모듈이 없는 위치 유닛을 도시하며;
도 43 및 도 44는 능동 부품 모듈의 또 다른 실시예를 도시하며;
도 45 및 도 46은 외부 러너를 구비한 구동 장치를 도시하며; 및
도 47 및 도 48은 본 발명에 따른 구동 장치의 또 다른 실시예를 도시한다.
도면에 기재된 도면 부호 및 그 의미는 도면 부호 목록에 확실히 나열된다. 기본적으로, 동일한 부품은 도면에서 동일한 도면 부호를 갖는다.
도 1은 본 발명에 따른 구동 장치를 운동축(11)의 방향에서 측면도와 정면도로 도시하고 있다. 구동 장치는 능동 부재(2)에 의해 둘러싸이는 수동 부재(1)를 포함한다. 능동 부재(2)는 결합 영역(10)을 통해 서로 결합되는 2개의 암(6)들로 된 암 페어(5)를 구비한 공진기(3)를 포함한다. 암(6)들은 음차와 유사하게 서로에 대해 실질적으로 대칭되게 형상화된다. 능동 부재(2)는 2개의 가진 수단(4)을 추가로 포함하며, 각각의 가진 수단은 예를 들어 접합에 의해 암(6)의 평탄부(9)에 결속된다.
접착제는 피에조 부재(4)에서 공진기(3)로 우수한 에너지 전달, 일정한 두께 및 전기 전도율과 같은 바람직한 특성을 포함하며, 그로 인해 접합 전극은 예를 들어 은에폭시 또는 예를 들어 니켈인 전기 전도성 미세 금속 입자의 첨가물 사이에 접촉될 수 있다. 게다가, 빠른 경화 능력, 열적 안정성, 낮은 피로 및 용이한 측정 과 같은 바람직한 특성을 포함한다. 접합은 공진기(3)와 가진 수단(4) 사이의 제조 부정확성에 대한 보상을 허용한다.
접합 기술에 덧붙여, 세라믹 피에조 부재를 공진기에 직접 증착하고 세라믹 피에조 부재가 소망한 두께에 이를 때까지 "성장"하도록 하는 가능성도 있다. 이러한 방법은 접합 작업이 수행될 필요가 없으며 접합층에서 발생하는 전단 손실(shear loss)이 없다는 장점을 갖는다.
다른 한편으로, 금속은 특히 LIGA 공법(LIGA technology) 또는 확산접합(diffusion bonding) 또는 납접(soldering)에 의해 갈바노 기술 수단(galvano technical means)을 구비한 피에조 부재(4) 상에 증착될 수도 있다.
접촉 영역(7)은 암(6)의 자유 단부에 배치된다. 접촉 영역(7)은 암 페어(5)의 대칭축에 대하여 서로 대향되게 위치한다. 수동 부재(1)는 가진 수단(4)의 여자(勵磁)없이 휴지 상태에서 암(6)에 의하여 접촉 영역(7)에 고정된다. 이러한 실시예에 있어서 수동 부재(1)는 둥근봉이므로, 회전 원통형 방식으로 형상화된다. 암(6)의 접촉 영역(7)은 수동 부재(1)의 형상과 유사하도록 바람직하게 형상화된다. 회전 원통형 수동 부재(1)에 따르면, 접촉 영역(7)은 오목하게 되고 이러한 오목 형상은 수동 부재(1)의 외주에 비해 약한 곡률(curvature)을 갖는다. 능동 부재(2) 또는 결합 영역(10)에서의 공진기(3)는 수동 부재(1)의 형상에 대응하는 개구부(14)를 포함하며, 수동 부재(1)는 상기 개구부(14)를 통과하여 인도된다. 따라서, 능동 부재는 운동축 방향으로 수동 부재(1)를 따라 이동 가능하며, 운동축을 중심으로 회전 가능하다.
운동축의 방향은 X 방향으로 언급되고, 이 방향에 수직하고 가지부(limb)의 평면에 수직한 방향은 Y 방향으로 언급되며, X 및 Y 방향에 수직한 방향은 Z 방향으로 언급된다.
각각의 암(6)은 평평한 평탄부(9)를 포함하며, 평탄부는 결합 영역(10)과 접촉 영역(7)을 구비한 암(6)의 자유 단부 사이에 배치된다. 평탄부(9)들은 XZ 평면에서 연장하며 서로에 대해 평행하다. 각각의 암의 평탄부(9)는 스프링 영역(8)을 통하여 결합 영역(10)에 결합되며, 그로 인해 굽힘축을 중심으로 결합 영역(10)에 대하여 Z 방향으로 이동 가능하다. 평탄부(9) 그 자체는 가진 수단(4)에 의해 경화되며, 그로 인해 주로 가진 수단(4)이 가진되는 때에 필수적으로 변형 가능하다. 그렇지 않다면, 암(6)은 스프링 영역(8)에서 결합 영역(10)에 대하여 진동할 수 있다. 이것은 암의 기본진동(fundamental oscillation)에 대응한다. 따라서, 암(6)의 개별 질점(質點)은 각 경우에 있어서 XY 평면에 평행한 평면으로 움직이며, 이 평면은 기본진동 평면으로 언급된다.
가진 수단(4)은 마찬가지로 평탄한 것이 바람직하며 대응 평탄부(9) 상에 평행하게 배치된다. 가진 수단(4)은 바람직하게는 피에조 부재이며, 가진 수단(4)의 평면 또는 각 평탄부(9)의 평면에 수직하게 분극된다. 피에조 부재는 d31 모드에서 작동되도록 하기 위하여 평탄부(9)의 주평면 또는 피에조 부재(4)의 주평면에 평행한 표면에서 전기 결합부를 포함한다. d31 모드에 따르면, 피에조 부재의 연장 방향은 적용된 전기장에 수직하게 이어진다. 또한, 피에조 부재는 다층 부재로서 형성될 수도 있다.
피에조 부재(4)는 바람직하게는 전기적으로 평행하게 연결되며, 예를 들어 공진기(3)가 공통 제1 결합부(46)로의 전기 결합을 형성하고, 2개의 피에조 부재(4)들의 외부 배치 전극들은 서로 결합되고 제2 결합부(47)에 결합된다. 2개의 결합부들은 도 33에 개략적으로 도시된 구동 회로에 결합되며, 아래에서 설명된다. 전기 결합 도선(electrical connection lead)(46, 47)은 분명한 도시를 위하여 다른 도면에는 도시되지 않는다.
도 30 내지 도 32는 도 1의 능동 부재와 유사한 능동 부재의 다양한 진동 모드를 도시하지만, 결합 영역(10)은 개구부(14)가 아니라 중앙 장착부를 포함한다. 도 30 및 도 31에 따른 모드에 있어서, 질점은 기본진동 평면에서 실질적으로 진동하며 이러한 연유로 인하여 단면도가 도시에 적합하다. 암(6)의 운동 단면은 평탄부(9)의 휴지 상태에서 그 자체로 각각 대칭이므로, 실질적으로 평행 6면체이다. 자유 단부에서의 각각의 암(6)은, Z 방향에서 보는 경우 평탄부(9)에 대해 비대칭 방식으로 형상화되는 단면을 갖는다. 여기서, 이러한 단면은 평탄부(9)의 평면에 수직한 성형 단면이며, 그로 인해 Y 방향으로 접촉 영역(7)을 형성한다. 성형 영역은 도면에서 수동 부재(1)를 향해 내부로 지향된다. 선택적으로 또는 부가적으로, 성형 영역은 외부로 지향될 수도 있다.
피에조 부재(4)의 여자에 의한 XZ 평면에서의 암(6)의 연장 또는 단축에 따르면, 상기 평면에 수직한 성형 영역은 그 관성 질량으로 인하여 Z 방향을 중심으로 성형 영역의 비틀림, 및 Y방향으로 접촉 영역(7)의 상승 또는 압축을 일으킨다. 바이모르프 효과(bimorphous effect)과 이러한 운동에 중첩되므로, 피에조 부재(4) 와 평탄부(9)의 다양한 연장으로 인한 암(6)의 곡률이다.
도 30은 소정의 제1 가진 주파수에서의 전형적인 상태를 도시한다. 암(6)은 한편으로 종방향(X 방향)으로 진동하고 다른 한편으로 서로 멀어지는 방향(Y 방향)으로 진동한다. 다른 진동을 유도하는 2개의 진동에 따라, 접촉 영역(7)은 예를 들어 각각의 회전 방향을 갖춘 타원 운동을 수행한다. 이에 의하여, 접촉 영역(7)은 이러한 수동 부재(1)의 존재 하에서 양 또는 음의 X 방향으로 수동 부재(1)에 힘을 가한다.
도 31은 주로 Y 방향으로 진동하고 서로 접촉하는 접촉 영역에서의 제2 가진 주파수에 대응한다. 수동 부재(1)의 존재에 따르면, 전체적으로 힘은 수동 부재에 가해지지 않으며, 그로 인해 수동 부재는 단지 헐거운 방식으로만 안내되고 외부로부터 작용하는 힘에 의해 이동될 수 있다.
도 32는 제3 가진 주파수에 대응하며, 암(6)들은 그 종방향, 즉 X 방향을 중심으로 비틀림 운동을 수행한다. 암들은 동일한 재료로부터 바람직하게 형상화되지만, Y 방향에서는 다르게 가시된다.
따라서, YZ 평면에서의 접촉 영역(7)의 개별 점들의 회전은 운동축에 수직한 평면에서 발생한다. 회전 방향은 가진 주파수의 선택에 의해 다시 선택될 수 있다. 따라서, 양 암들의 접촉 영역(7)들은 동일한 회전 방향으로 회전한다.
2.5×2.5×4.5밀리미터의 치수를 갖는 도 30 내지 도 32에 따른 하나의 단편 공진기(3)를 위한 바람직한 가진 주파수는 대략 149 kHz(도 30) 또는 26 kHz(도 31) 또는 148 kHz(도 32)이다. 기본적으로, 주파수는 공진기(3)의 지오메트리와, 탄성률, 가로 수축(transverse contraction) 및 밀도와 같은 재료 데이터에 의존한다. 예를 들어, 공진기(3)는 강으로 제조되고 300 kHz 내지 500 kHz 사이의 주파수로 작동될 수 있으며, 특히 전방 운동을 위한 420 kHz 및 후방 운동을 위한 350 kHz로 작동될 수 있다. 그렇지 않다면, 공진기(3)는 알루미늄으로 제조되고 150 kHz 내지 300 kHz 사이의 주파수, 특히 전방 운동을 위한 165 kHz 및 후방 운동을 위한 250 kHz로 작동될 수 있다.
다양한 진동 모드의 주파수는 소망한 전체 운동이 발생하도록 서로 조화된다. 능동 부재(2)를 형성할 때에, 아래의 사항들을 고려한다:
2개의 편향 방향을 별도로 고려하면, 한편으로 종방향(굽힘 없음)의 진동과 다른 한편으로 순수 굽힘 운동은 균일한 빔과 같이 존재한다. 종방향 진동의 주파수를 고려한다면, 최대 편향을 갖는 주파수는 제1 진동 모드에 대응한다. 진폭과 그로 인한 구동 장치의 단계 너비가 최대이다. 높은 모드에서는 주파수가 증가하고 진폭이 감소한다.
순수 굽힘 운동을 고려한다면, 예를 들어 제3 굽힘 모드는 종방향 진동의 상기 결정된 제1 진동 모드에서와 동일한 주파수에 적용될 수 있다. 이는 수동 부재(1)로부터 개별 암(6)의 자유 단부의 최대 상승을 허여한다. 따라서, 최대 단계 너비에 따르면, 굽힘 모드에서 최대 운동을 달성하며, 가장 넓은 단계를 구비한 신뢰 가능한 전방 구동이 전체적으로 발생한다.
균일한 빔을 구비한 종방향으로의 고유 공명은 최초 근사에서 길이와 선형적으로 관련되지만, 반면에 굽힘 진동은 공진기의 두께의 높은 동력에 따라 달라지 며, 독립 변수들은 공진기(3)의 전체 진동 거동이 설정될 수 있는 방식으로 제시된다. 주어진 재료에 따르면, 소망한 진동 거동은 지오메트리의 선택에 의해 설정된다.
이러한 실시예에 있어서, 봉 또는 핀으로서 형성된 수동 부재(1)는 1.5 밀리미터의 직경을 갖는다. 1 N 이상의 이송력은 2개의 피에조 부재(4)들을 구비한 기술된 모터를 사용하여 생성될 수 있다.
도 33은 작동 주파수(f)(예를 들어 kHz로 표기)에 의존하는 구동력 또는 모멘트(F)(예를 들어 뉴턴 또는 Nm로 표기)의 경로를 도시한다. 각각의 운동 형태는 적어도 하나의 소정 주파수(f)에 대응한다. 다음 소정의 주파수는 예를 들어 상승 주파수와 함께 발생한다:
- 자유롭게 회전 가능한 모멘트, 즉 고정 효과가 발생하지도 않으며 전체적으로 힘도 생성되지 않는 모멘트를 위한 f31,
- 선형 전방 운동을 위한 f1,
- 자유롭게 회전 가능한 모멘트를 위한 f32,
- 선형 후방 운동을 위한 f2,
- 시계 방향의 회전을 위한 f4. 및
- 반시계 방향의 회전을 위한 f5.
본 발명에 따른 모터의 작동에서 고려되어야 하는 하나의 요소는 암의 강성도이다. 보다 경화된 암이 형성될수록, 능동 부재와 수동 부재는 보다 정확하게 결합되어야 하며 열팽창률, 제조 공차 및 마모의 영향이 더욱 커진다.
공진기 또는 암이 보다 덜 경화될수록, 이들 영향을 줄어드는 반면에 바이어서는 최적의 표면 가압을 보장하기 위해 더 넓어져야만 한다.
최적 표면 가압은 점마다 힘(pointwise force)이 마모를 유발하지 않을 정도의 크기일 때에 보장된다. 점마다 힘이 매우 크다면 수명이 제한되고, 점마다 힘이 매우 낮다면 모터의 최대 능력이 고갈된다.
도 2는 암마다 각각 2개의 피에조 부재를 구비한 구동 장치를 도시한다. 동일한 암(6)에 결속된 2개의 피에조 부재(4)는 바람직하게는 동일한 공급부에 의해 작동되지만, 하나의 피에조 부재가 팽창하는 때에 다른 피에조 부재는 수축하는 방식으로 서로 결합된다. 암의 곡률은 이러한 방식으로 장려된다. 이러한 실시예의 다른 변형예에 따르면, 피에조 부재(4)는 동시에 수축하거나 팽창하는 방식으로 서로 결합된다. 이러한 경우에, 피에조 부재(4)는 운동 방향으로 각각의 평탄부(9)를 주로 연장하거나 축소시키며, 암의 평면에 수직한 접촉 영역의 운동은 암의 단부에서의 비대칭 질량 분포가 있을 때까지 유발되지 않는다.
도 3은 동일 방향을 가르키며 운동축을 중심으로 서로 90°만큼 회전되는 2개의 암 페어(5)들을 구비한 구동 장치를 도시한다. 암(6)들은 동일 방향으로의 굽힘에 의한 단일 십자형 금속편의 형태이다. 각각의 암은 가진 수단(4)을 구비한다. 암(6)들은 동일한 방식으로 기계적으로 구조화되며, 가진 수단(4)들은 전기적으로 평행하게 결합된다. 작동 중에, 각각의 암 지점은 개별 평탄부(9)의 평면에 수직한 평면에서 진동한다. 각각의 암은 예를 들어 수동 부재(1)에 대해 대략 적어도 45도의 각도로 이어진다.
도 4는 각각의 경우에 있어서 동일 평면 그리고 운동축(35) 방향 평면에서 서로 인접하게 배치되는 하나의 암(6)마다 2개의 피에조 부재(4)들을 구비한 구동 장치를 도시한다. 암(6)의 운동 부품은 서로 인접하게 배치된 2개의 피에조 부재(4)들의 상 변위 작동에 의해 XY 평면 내에서 여자된다. 이것은 도 5에 도시되어 있다. 운동축을 중심으로 한 수동 부재(1)의 회전은 이러한 방식으로 여자된다.
따라서, 바람직하게는 동일한 암(6) 상의 피에조 부재(4)는,
- 동일 방향으로 분극되고 다른 극성을 가진 신호로 작동되거나, 또는
- 동일 구동 신호로 작동되지만 평탄부(9) 상에서 역으로 분극되어 배치된다.
암 페어(5)의 2 암(6) 상에 있는 피에조 부재(4)들은, 하나의 암(6)이 양의 Z 방향으로 굽혀지고 다른 암(6)은 음의 Z 방향으로 굽혀지는 방식으로 바람직하게 배치되고 및/또는 작동된다.
도 6은 도 4 및 도 5에 따른 비대칭 작동 대신에 암의 평면에서 비대칭을 구비한 구동 장치를 도시한다. 암들은 암 평면상으로의 도면, 즉 XY 평면으로의 도면에서 비대칭적으로 형상화된다. 이는 도 6에 따른 본 발명의 실시예 형태에 있어서 이러한 암 평면의 절개부 또는 슬롯(49)에 의해 영향을 받는다. 선택적으로, 이것은, 특히 자유 단부의 영역, 암 평면 및 Z 방향으로의 암(6)의 성형 영역에 의해 영향을 받을 수도 있다. 암의 평면 내의 접촉 영역(7)의 진동은 이러한 비대칭에 의해 여자될 수도 있다. 이러한 진동은 암의 평면에 수직한 진동부에 중첩되며, 이는 도 32와 조합으로 설명되는 바와 같이 YZ 평면의 접촉 영역(7)의 개별 지점들의 회전으로 이어진다.
도 7은 평탄하고 실질적으로 직사각형 방식으로 형상화되는 수동 부재(1)를 구비한 구동 장치를 도시한다. 이 장치는 병진 운동만이 가능하다. 유사한 방식으로, 수동 부재(1)의 프리즘형 또는 원통형 및 비회전식 대칭 단면이 가능하다. 따라서, 각 실린더 축은 운동축(11)에 평행하고 바람직하게는 공진기(3)의 대칭축과 일치한다.
도 8은 튜브형 수동 부재를 구비한 구동 장치를 도시한다. 수동 부재(1)는 예를 들어 카메라 렌즈(48)와 같은 광학 부재의 운반체이며, 그로 인해 구동 장치는 자동 포커싱 또는 자동 줌 기능(7)을 위해 사용될 수 있다. 수동 부재는 포함할 수도 있으므로 유리 섬유와 같은 광학 섬유를 배치한다.
도 9는 내부 러너로서 형성되는 활성 부재를 구비한 구동 장치를 측면도와 운동축의 방향으로의 도면으로 도시한다. 작동 방식은 이전에 도시된 실시예와 기본적으로 동일하나, 외부로 가해지는 편향력과 구동력이 있으며, 수동 부재는 적어도 부분적으로 능동 부재(2)를 둘러싼다. 또한, 회전, 병진 및 조합된 나선형 운동도 가능하다. 둥근 튜브형 수동 부재(1) 대신에, 사각 프로파일, 또는 예를 들어 U 형 프로파일과 같은 개방된 프로파일과 같은 다양한 중공 프로파일을 갖출 수도 있다. 이는 회전 부품이 없는 명백한 선형 운동을 허여한다. U 프로파일과 같은 개방 프로파일에 따르면, 능동 부재는 견고하게 지지될 수 있으며, 수동 부재(1)는 러너로서 역할을 한다.
도 10 내지 도 12는 능동 부재(2)를 결속하기 위한 다양한 변형예를 도시한 다. 능동 부재(2)는 예를 들어 기계 장치와 같은 기준물체에 결속될 수 있으며, 구동 장치의 일부를 형성한다. 또는, 능동 부재(2)는 이동될 또 다른 부품에 결속될 수 있다. 이를 위해, 결속부는 각각의 경우에 있어서 공진기(3)의 공간 진동의 노드 지점에 배치된다. 진동은 이에 의해 거의 영향을 받지 않으며, 결속을 통해 거의 에너지가 소실되지 않으며, 보다 적은 교란 음파 반사가 결속부를 통해 전송된다. 노드 지점은 바람직하게는 적용된 구동 주파수에서 예를 들어 능동 부재(2)의 진동 거동의 유한요소(FEM)분석으로 결정된다.
도 10에 따르면, 예를 들어 핀과 같은 수용 결속 부재를 위한 결속 구멍(17)들은 결합 영역(10)에 대해 암 방향과 대향되게 놓이는 방향으로 암(6)의 연장부(18)에 배치되며, 암(6)의 평면에 수직하게 배치된다. 도 11에 따르면, 결속 구멍(17)들은 결합 영역(10)에서 및 개구부(14)의 양 측면 상의 암(6)의 평면에 평행하게 배치된다. 도 12에 따르면, 결속 구멍(17)들은 도 11에서와 같이 배치되며, 암들은 반대 방향으로 결합 영역(10)을 넘어 연장된다. 가진 수단(4)은 암(6)으로부터 연장된 암(18)까지 연장한다. 따라서, 가진 수단(4)은 예를 들어 결합 영역(10)에 대해 적어도 대략적으로 중심에 배치된다. 원칙적으로, 연장된 암(18)의 진동 주파수의 적응에 따르면, 접촉 영역(7)은 연장된 암(18)에 배치될 수도 있다.
도 13은 d31 모드에서 다층 구조로 된 피에조 부재(4)를 구비한 피에조모터를 도시한다. 이러한 피에조 부재(4)의 구조 및 전기 접촉은 단면도로 개략적으로 분리하여 도시된다. 다층은 예를 들어 은, 니켈, 플래티늄 등으로 된 전도성 중간층 사이에 놓이는 피에조 부재로 된 몇 개의 층들을 포함한다. 중간층들은 서로 어 긋나서 서로에 대해 측방으로 결합되므로, 예를 들어 제1 전위를 갖춘 홀수의 층들과 제2 전위를 갖춘 짝수의 층들을 구비한다. 일반적으로 층 두께는 10 내지 20 미크론이며, 이는 동일한 전기장을 생성하기 위해서는 단층에 비해 전압이 더 낮추어질 수 있다는 사실로 이어진다. 전기장의 방향은 E로 나타내어 지며, 길이 연장 방향(dL)이다.
예를 들어, 0.25 mm 두께의 단층 피에조 부재는 전기장이 피에조 효과가 최대로 될 수 있을 정도로 크게 되도록 하기 위해 100 볼트를 필요로 한다. 각각 12.5 미크론의 층 두께를 갖는 20개의 층들을 구비한 다층 피에조 부재는 5 볼트의 전압을 갖고서 작동될 수 있다.
도 14은 d33 모드에서 피에조 부재(4)를 구비한 피에조 모터를 도시할 뿐만 아니라 다층 구조 및 이러한 피에조 부재(4)의 접촉부를 도시한다. d33 모드에 따르면, 피에조 부재의 연장 방향(dL)은 적용된 전기장(E)에 평행하게 이어진다. 따라서, 몇 개의 피에조 부재들은 서로에 대해 적용되며, 피에조 부재의 분극 방향은 각 평탄부(9)의 평면에 평행하게 이어진다. 피에조 부재들은 평탄부(9) 또는 전체적으로 피에조 부재(4)의 주평면에 수직하게 이어지는 표면상에서 전기 접축부(46, 47)들을 포함하며, 그로 인해 YZ 평면에서 포함한다.
도 15는 d15 모드에서 피에조 부재를 구비한 피에조 모터를 도시한다. d15 모드에 따르면, 피에조 부재에서 전단력이 발생하고, 전단 운동이 발생한다. 이러한 전단 운동을 이용하기 위해서는, 한편으로 피에조 부재(4)들이 각각 하나의 암(6)에 결속되며, 각 암(6)과 대향되게 놓은 외부 표면은 공통 유지 물체(19)에 결속된다. 도 16 및 도 17은 도 15에 따른 피에조 모터를 다양한 운동 상태로 도시한다. 공진기(3)는 피에조 부재(4)의 전단 운동에 의해 X 방향으로 운동축을 따라 전후로 가속되며, 그로 인해 암들은 엄청나게 연장되거나 단축되지 않는다. 전술한 바와 같이, 암들의 자유 단부는 이에 의해 구동 진동으로 설정될 수 있다. 이러한 진동을 허여하기 위해, 암들은 피에조 부재(4)와 접촉 영역(7) 사이에 자유 영역(200)을 포함하며, 이는 피에조 부재(4)에 결합되지 않으며 이로 인해 경화된다.
이러한 실시예의 일 변형예를 따르면, 공진기(3)는 결합 영역(10) 대신에 좌측에서 2개의 부품들을 구비하며, 자유 영역 및 각각의 접촉 영역(7)에서 진동 가능한 단부를 포함한다. 웨브는 도 13에 도시된 바와 유사하게 공진기(3)의 2 부품들 사이에 배치될 수 있으며, 이로 인해 공진기는 다시 한번 일체로 된다.
도 18은 수동 부재(1)의 하나의 바람직한 설계를 도시한다. 채널(21)은 수동 부재(1)의 외주 상에 형성된다. 채널은 먼지 및/또는 마멸 입자가 외주 표면으로부터 배출되도록 한다. 구동력 및 속력의 요동은 이에 의해 감소된다. 채널(21)은 바람직하게는 외주에서 원형 또는 나선형 방식으로 이어진다.
이와 유사하게, 도 19는 능동 부재(2)의 접촉 영역(7)에 형성되는 채널(21)을 도시한다. 본 발명의 다른 바람직한 실시예에서의 채널(21)은 마이크로 맞물림을 형성하며, 이로 인해 능동 부재(2)와 수동 부재(1) 사이의 동력 전달을 개선한다.
도 20은 U형 또는 음차형 와이퍼(23)를 도시하는데, 상기 와이퍼는 암 페어(5) 내에 배치되고 결합 영역(10)에 결속되며, 그로 인해 와이퍼(23)는 공진 기(3)의 진동에 주목할 영향을 주진 못한다. 와이퍼(23)는 예를 들어 펠트 스티립 또는 고무 스트립과 같은 세정 수단(24)을 포함하며, 상기 세정 수단은 능동 부재(2)와 함께 이동하므로 수동 부재(1)를 세정한다.
도 21은 작동의 자왜 방식(magnetostrictive manner)을 갖춘 구동 장치를 도시한다. 일반적으로, 수동 부재(1) 또는 능동 부재(2)는 주변에 대해 견고하게 유지될 수 있다. 수동 부재(1)가 견고하게 유지된다면, 능동 부재는 러너로서 표시된다. 능동 부재(2)의 에너지 공급은 더 이상 병진 및 지속하는 회전 운동의 문제로 되지 않는다. 이러한 문제는 도 21에 따른 실시예에서 해결되는데, 수동 부재(1)와 연결된 자기장을 형성하기 위한 장치는 수동 부재(1)를 따라 배치된다. 이러한 장치는 예를 들어 코일(25)이며, 코일의 권선부는 수동 부재와, 능동 부재(2)를 위한 공간 주변으로 이어진다. 자기장은 코일(25)에 형성된다. 가진 수단(4)과 마찬가지로 능동 부재(2)는, 예를 들어 Φ로 표시되는 자속에 비례하여 기계적으로 변형하는 터페놀(Terfenol)과 같은 자왜 부재를 포함한다. 공진기(3)의 진동은 이에 의해 가진될 수 있다.
도 22는 도 3에 도시된 것과 유사하나 단지 2개의 암(6)들만 갖춘 일체의 굽은 공진기(3)를 구비하는 구동 장치를 도시한다. 공진기(3)는 2개의 스프링 영역(8)에서 하나의 평탄하고 긴 금속 박판으로 된 벤트이다. 스프링 영역(8)들 사이의 영역은 결합 영역(10)이며, 여기서 공진기는 다른 몸체에 결속된다. 스프링 영역(8)들 사이의 2개의 영역과 금속 박판의 단부는 평탄부(9)를 구비한 암(6)을 형성한다. 암(6)은 예를 들어 결합 영역(10)에 대해 대략 45도의 각도로 이어지며, 가진 수단(4) 또는 피에조 부재(4)를 구비한다. 금속 박판 단편은 암(6)의 자유 단부에서 약간 굽어지며, 이는 한편으로 접촉 영역(7)을 의미하며 다른 한편으로 암의 평면에 수직한 비대칭이 전술한 바와 같이 발생함을 의미한다. 접촉 영역(7)은 도 24에 도시된 바와 같이 수동 부재(1)의 외주 형상에 적응되는 것이 바람직하다. 본 발명의 도시된 실시예는 수동 부재(1)의 제한된 선형 운동을 위해 형성된다. 개구부(14)는 더 증가한 운동을 위한 결합 영역(10)에 제공될 수 있다.
도 23은 하나의 가진 수단(4)만을 구비하는 구동 장치를 도시한다. 구동 장치는 도 3의 구동 장치와 유사하게 형상화되는 반면에, 결합 영역(10)에 배치되는 하나의 피에조 부재(4) 뿐만 아니라 보다 넓어진 암들을 포함한다. 4개의 암(6)들은 운동축에 대해 동일한 방향을 가지며, 바람직하게는 동일한 방식으로 기계적으로 형성된다. 능동 부재가 진동 암에 부착되지 않으므로, 이들의 고유 주파수는 매우 정확한 방식으로 설정될 수 있다. 도 3 및 도 22에 도시된 바와 같은 능동 부재와, 가진 수단의 전기적 병렬 작동에 따르면, 동일한 주파수가 각각의 암(6)에 부과된다. 이와는 달리, 도 23 및 도 24에 도시된 바와 같은 수동 부재는 자유로운 방식으로 진동한다. 이로 인하여, 수동 부재에 비해 작은 에너지 수요가 일반적으로 발생한다. 실제로는, 각각의 경우에 있어서 수동 암(6)은 서로 약간씩 다른 공진 주파수를 포함한다. 이러한 차이는 허용 가능한 진폭이거나, 트리밍에 의해 감소될 수도 있다. 트리밍은 예를 들어 암의 재료의 부식에 의하거나, 또는 레이저를 사용하여 실행된다.
도 24는 도 23의 구동 장치와 유사하나, 서로 반대 방향을 지향하는 2개의 암 페어들을 구비하며 운동축(11)을 중심으로 서로에 대해 90도 회전되는 구동 장치를 도시한다. 암(7)의 고유 주파수의 진동 모드는, 예를 들어 200 kHz인 제1 주파수에서 상부 암 페어(5)가 견인 운동을 수행하고 하부 암 페어(5)가 접촉 운동을 수행하도록 조화되며, 능동 부재는 이에 의해 위로 움직인다. 예를 들어 300 kHz인 제2 주파수에서는 하부 암 페어(5)가 견인 운동을 수행하며 상부 암 페어(5)가 접촉 운동을 하며, 능동 부재(2)는 아래로 움직인다.
바람직하게는, 구동 장치는 하나의 십자형 금속 박판 단편에 의해 형성되며, 이로부터 제1 암 페어(5)가 금속 박판의 평면의 외부로 제1 방향을 따라 십자의 2 암들의 굽힘에 의해 발생하며, 제2 암 페어(5)는 반대 방향으로 다른 암들을 굽힘으로써 발생한다.
접촉 영역(7)의 둥근 성형 영역은 도 24에 상세도에서의 예에 의해 도시된다. 이러한 성형 영역은 원통 내측 표면의 일부를 형성하므로 원통형 수동 부재(1)의 형상에 대응한다. 대응 성형 영역은 다른 도면에 따른 실시예 형태에서 형성될 수도 있다.
도 25 내지 도 27은 굽은 금속 박판 부품으로 된 능동 부재들을 각각의 경우마다 다양한 도면으로 도시한다. 각각의 경우에 있어서, 공진기(3)는 저렴한 방식으로 펀치 또는 굽힘 부품으로서 제조될 수 있다.
도 25는 결합 영역(10)에서 예를 들어 용접에 의해 서로 견고하게 결합되는 2개의 신장된 금속 박판 부품들을 포함하는 공진기(3)를 갖는 구동 장치를 다양한 도면으로 도시한다. 결합 영역(10)의 2개의 금속 박판 부품들은 서로에 대해 평행 하고 공진기(3)의 대칭 평면에 대해 평행하게 이어진다. 이를 결합하기 위해, 금속 박판 부품들은 예리한 제1 굽힘(26)에 의해 서로 멀어지도록 굽혀지며, 이어서 예리한 제2 굽힘(27)에 의해 서로를 향해 다시 굽혀진다. 예리한 제1 굽힘 및 제2 굽힘과, 그 사이에 배치된 금속 박판 단면은 스프링 영역(8)으로서 역할을 한다. 예리한 제2 굽힘(27)에 이어서, 평탄부에 부착되는 가진 수단(4)을 구비한 평탄부(9)가 서로에 대해 실질적으로 평행하다. 평탄부(9)에 이어서, 금속 박판 부품은 이러한 평면 외부로 각각의 평탄부(9)의 평면에 대해 서로 비대칭적으로 굽혀지며, 접촉 영역(7)을 구비한 2개의 접촉 단면(28)을 형성하며, 상기 접촉 단면은 서로에 대해 만곡된다. 이러한 접촉 단면(28)의 영역에서의 금속 박판 부품들은 평탄한 단면(9)에서 더욱 폭이 넓어진다. 이로 인해, 접촉 단면(28)은 평탄부(9)의 평면 외부에서 상대적으로 큰 질량을 가지며, 이는 본 발명에서 특징적인 진동을 개선한다. 암(6)의 진동 주파수는 접촉 단면(28)의 측방향 돌출부(29)를 연마함으로써 조화될 수 있다.
암은 예를 들어 길이가 약 4 mm이며 CuBe 금속 박판에 의해 펀치되는데, 여기서 작동 주파수는 예를 들어 50 kHz 내지 300 kHz이다. 피에조 부재(4)는 한편으로 암(6)에 의하여 다른 한편으로 와이어(미도시)에 의하여 연결된다. 이는 도 26 및 도 27에 따른 다음의 2개의 실시예이다.
본 발명의 바람직한 실시예에 있어서, 접촉 단면의 측방향 돌출부(29)는 다양한 길이를 갖는다. 따라서, 이에 의하면 암(6)의 비대칭은 평탄부(9) 상의 평면의 도면에서 존재하며, 이는 진동이 도 5 및 도 6과 조합하여 설명되는 바와 같이 회전 운동을 가진하기 위해 형성될 수 있음을 의미한다.
도 26은 선행 실시예 형태와 유사하게 형성되는 자유 영역의 암(6)들을 구비한 구동 장치를 도시한다. 하지만, 또 다른 몸체가 결합 영역(10)으로서 제공되며, 그 위에 암(6)들이 각각 결속된다. 암(6)과 결합 영역(10) 사이의 경화도를 줄이기 위한 암(6)은 결합 영역(10)의 부근에서 더 작은 단면적을 갖고 형상화되며, 이는 스프링 부재(8)가 형성됨을 의미한다. 예를 들어 홈(30)이 암에서 형성되거나, 또는 암이 보다 얇거나 좁게 형성된다.
도 27은 유사한 단부 영역을 구비한 또 다른 공진기(3)를 2개의 서로 다른 도면과 단면도로 도시한다. 공진기(3)는 단일 금속 박편 부품으로부터 펀치되고 굽혀진다. 2개의 암들은 결합 영역(10)의 평면의 외부로 서로에 대해 굽혀지며, 접촉 단면(28)까지 서롱 대해 평행하게 이어진다. 이들 평행 단면(9)은 가진 수단(미도시)(4)을 결속하기 위해 제공된다. 결합 영역(10)에 이어서, 암(6)은 대향되게 놓인 암(6)을 향해 각각 굽혀지는 경화 탭(31)들을 포함하며, 대향되게 놓인 경화 탭(31)에 견고하게 결합된다. 공진기(3)는 서로에 대해 접혀지고 결합되는 금속 박편 탭(31)에 의해 견고한 단부에서 경화된다.
바람직하게는, 2개의 결속 탭들이 암(6)과 반대 방향으로 결합 영역(10)의 평면의 외부로 굽혀진다.
도 28은 수동 부재로서의 원통을 구비한 구동 장치를 도시하며, 암 페어의 대칭축에 수직하게 배치된다. 완벽 대칭 암과 동일한 작동에 따르면, 좌측 암의 접촉 영역(7)은 예를 들어 시계 방향으로 회전할 것이며, 우측 암의 접촉 영역(7)은 반시계 방향으로 회전한다. 이는 도 29에 따른 실시예의 경우에 바람직한 반면에, 본 실시예에는 바람직하지 않다. 이러한 이유로 인하여, 암(6)의 다양한 진동 거동이 도 28에 도시된 것과 같은 암 형상의 미세한 비대칭에 의해 형성된다. 스프링 영역(8) 상의 도시된 농축부는 암 길이를 줄이며 그로 인해 고유 주파수를 높이고, 그로 인해 암의 평면에 수직하거나 평행한 진동들 사이의 위상 변위를 변화시키며, 또한 접촉 영역(7)의 회전 방향을 변화시킨다. 선택적으로 또는 부가적으로, 암(6)의 보강 운동을 달성하기 위해 피에조 부재(4)의 별도의 작동을 수행할 수도 있다.
도 29는 반대 방향으로 회전될 수 있는 회전자(15)로서 2개의 원통을 포함하는 수동 부재를 구비한 구동 장치를 도시한다. 상기 2개의 회전자(15)는 동일하거나 다른 직경을 구비하며, 지지 부재(16)에 의해 각각 장착된다. 회전자(15)는 암(6)의 방향에 대해 수직으로 이어지는(X 방향) 회전축을 각각 구비하며 암(6)의 평면(XY 평면)에 평행하다. 회전자(15)는 접촉 영역(7)에 의해 서로에 대해 편향되며, 모터의 작동 중에 접촉 영역(7)에 의해 구동된다. 이를 위해, 암(6)은 서로에 대해 실질적으로 거울 대칭으로 형상화되며, 이로 인해 암은 서로 대칭적으로 진동하며, 이로써 회전자(15)의 회전을 반대 방향으로 실시되는데, 회전자(15)는 그 공통 접촉점에서 서로에 대해 구른다. 회전자(15)의 하나 또는 양 축은 또 다른 장치의 구동 장치를 위해 설정된다.
도 35는 특히 평탄한 형상을 갖는 본 발명의 또 다른 바람직한 실시예를 평면도 및 측면도로 도시한다. 능동 부재(2)는 평탄한 암(6)을 포함하며, 그 평면들은 서로 평행하게 놓이며 동일 평면에 놓인다. 공진기(3)의 평탄부(9)는 가진 수 단(4)과 함께 상기 평면에 평행하거나 상기 평면에 배치된다. 이와 유사하게, 접촉 영역(7)의 구동 운동은 상기 평면에 평행하게 발생한다. 공진기(3)는 전이 영역(51)을 통해 Y형 지지부(53)의 2 탄성 암 내부로 합체된다. 공진기(3)의 진동의 노드 지점(52)은 지지부(53)의 암이 결합하는 곳에 배치된다. 공진기(3)와 지지부(53)는 바람직하게는 단일 평탄한 금속 박판 부품의 형상이다.
수동 부재(1)는 신장되고 능동 부재에 대해 수동 부재의 주 연장 방향 또는 운동축(11)을 따라 이동 가능하게 배치된다. 수동 부재는 안내하기 위해 능동 부재(2)의 접촉 영역(7)을 수용하기 위한 종방향 그루브(54)를 선택적으로 포함한다.
수동 부재(1)는 본질적으로 탄성으로 바람직하게 형성되며, 그로 인해 능동 부재(2)의 접촉 영역(7)과 접촉하는 영역은 탄성적인 방식으로 서로에 대해 상대적으로 이동 가능하다. 암(6)은 이로 인해 암 평면에서 상대적으로 높은 경화도를 갖을 수 있다.
무엇보다도, 스프링은 수동 부재(1)의 접촉 영역(7)의 마모를 보상하는 역할을 한다.
암 페어(5)의 암(6)들은 수동 부재(2)의 허용 가능한 운동 방향과 다른 방향으로 수동 부재(2)에 대해 서로 반작용을 하고 운동 방향으로 서로 작용하며, 그로 인해 운동 방향으로의 그 영향을 증가시킨다. 접촉 영역(7)은 평탄한 암(6)으 평면 또는 공진기(3)의 평면 외부에서 이동할 수도 있으며, 그로 인해 가진 주파수에 따른 3차원 진동 러닝을 실시한다. 구동 장치를 위한 이러한 진동을 이용하기 위하여, 수동 부재(1)는 도 35에 도시된 홈이 없이 바람직하게 형성되며, 예를 들어 서 로에 대해 되튀기는 평탄한 정수부를 구비한다. 판의 평면과 그 운동 방향은 휴지 상태에서 접촉 영역(7)들 사이의 결합 직선에 대해 수직하게 이어진다. 바람직하게는, 운동 방향은 암 금속 박판의 평면에 대해 평행하게 이어지지만, 상기 평면에 대해서는 수직하거나 비스듬히 움직인다. 전방 또는 후방 운동으로 발생하는 대다수의 심각한 진동 모드는 암의 평면에 평행하게 존재한다. 작동을 위하여, 서로에 대해 근접하게 위치하는 적합한 가진 주파수의 쌍이 선택되며, 하나는 전방을 위해서고 다른 하나는 후방을 위해서이다. 이는 동일한 코일이 양 주파수를 위한 전압을 증가시키는 데 사용될 수 있는 장점을 갖는다.
선택적으로 도 36에 도시된 바와 같이, 암(6)은 탄성 방식으로 형성될 수 있으며 복귀하는 수동 부재(1)는 탄성 없이 형성될 수 있다. 또한, 이러한 실시예에 있어서, 암(6), 피에조 부재(4)를 구비한 평탄부(9) 뿐만 아니라 지지부(53)는 단일 부품에 바람직하게 형성될 수 있다. 지지부는 암(6)과 대향되게 놓이는 평탄부(9)의 측면 상의 Y형 암이 없이 결합할 수도 있다.
연장 방향을 갖춘 가진 수단(4)은 도 35 및 도 36에 따른 실시예에서의 진동을 가진하기 위해 공진기(3)의 평면에 평행하게 배치된다. 공진기(3)의 일 측면 상의 하나의 피에조 부재(4) 또한 제시될 수 있다. 따라서, 적합한 높은 가진 주파수에 따르면, 무엇보다도 가진되는 공진기 평면 또는 암 평면의 진동과, 공진기(3)의 저주파 굽힘 진동은 중대하게 가진되지 않는다.
도 34는 피에조 모터를 작동시키기 위한 회로의 블록 선도를 도시한다. 구동 회로는 다양한 주파수의 신호를 생성하기 위한 신호 발생기 또는 다주파 발생 기(41)를 포함한다. 이를 위한 다주파 발생기(41)는 신호들을 출력하는 몇 개의 개별 주파수 발생기(42)들을 절충하며, 그 중 하나는 전환 스위치에 의해 선택될 수 있다. 다주파 발생기(41)의 출력 신호로서의 상기 신호는 증폭기(44)로 인도된다. 모터(45)는 증폭기의 출력 신호에 의해 작동된다. 각각의 주파수 발생기(42)는 예를 들어 나선형 운동과 같은 조합된 가진을 위한 몇 개의 중첩된 주파수 요소를 갖는 신호를 생성할 수도 있다. 신호 발생기(41)는 종래 방식(아날로그) 또는 수치적으로(디지털) 구조화될 수 있다. 적합한 작동은 작동 신호의 적용, 통합 및 복잡함에 따라 선택된다. 따라서, 주파수, 신호 형상 및 진폭은 변화될 수 있다. 진폭은 이동 속력을 실질적으로 결정한다.
증폭기(44) 또는 구동 장치는 발생기(41)로부터 피에조 모터(45)로 생성된 신호를 적용한다. 요구되는 구동 장치 위상관계(topology)는 작동 신호의 형상 또는 크기에 따라 선택될 수 있다. 브리지 회로는 사각 작동에 적합하다. 선형 증폭기 또는 디지털 증폭기는 다른 모든 신호 형상에 필요하며, 예를 들어 "클래스 D" 증폭기는 펄스폭 변조(PWM)를 위해 필요하다. 소정의 환경 하에서는, 다층 피에조 부재의 사용하여 증폭기(44) 없이 완벽하게 실시할 수 있다.
인덕턴스(inductance)는 작동 모드에 따라 피에조 모터(45)와 구동 전자기기 사이에 결합될 수 있다. 이상적인 경우, 인덕턴스는 피에조 모터 축전용량(piezomotor capacitance)을 갖도록 형성되며, 이는 바람직한 모터 작동 주파수에서 연속적인 공진 주파수 회로를 형성한다. 전압의 증가는 이러한 방식으로 페이조 부재(4)를 통해 달성될 수 있다. 사각 작동에 따르면, 연속적인 진동 회로는 필 터 및 신호 중계장치로서의 역할도 한다. 사각 신호에 의해 제공되는 피에조 모터는 인덕턴스의 중간 결합에 의하여 진폭이 증가된 사인 신호로 작동된다.
피에조 모듈과 코일을 포함하는 진동 회로는 그 질에 따라 거의 4배의 전압을 허용한다. 유효 전압은 전압 공급을 재극성 조정(re-poling)함으로써 2배로 될 수 있다. 따라서, 전체적으로 피에조 모듈에서 20 V의 전압이 예를 들어 2.5 V의 공급 전압을 갖고서 제조될 수 있다.
다양한 운동 방향을 위한 주파수는 바람직하게는 서로에 대해 인접하게 선택되므로, 코일은 양 주파수 모두에 대해 가능한 한 효과적이다. 따라서, 진동 회로의 최대 전압은 2 주파수 사이의 중간값으로 적어도 대략적으로 설정된다. 연장부를 갖는 도 37 내지 도 44에 따른 공진기(3)를 위한 전형적인 주파수는 400 내지 600 kHz 사이의 영역에 위치한다.
도 37은 렌즈를 배치시키기 위한 위치 유닛을 도시한다. 구동 장치의 수동 부재(1)를 통해 피구동체(82)를 구동하는 구동 장치의 능동 부품 모듈(90)은 기초 본체(83) 상에 존재한다. 피구동체(82)는 수평 기기(85)를 통해 기초 본체(83) 상에서 조립된다. 기초 본체(83)의 부품으로서 덮개 부품(84)은 피구동체(82) 위에서 조립된다. 기초 본체(83)가 영상 탐지 칩을 운반하는 반면에 피구동체(82)는 렌즈를 구비한 유지부를 포함하며, 렌즈는 피구동체(82)의 운동에 의해 포커싱될 수 있다. 평행 기기(85)는 기초 본체(83) 또는 능동 부품 모듈(90)에 대한 수동 부재(1)를 구비한 피구동체(82)의 실질적인 선형 운동 또는 직선 운동을 허여한다. 엄밀히 말하여, 이러한 운동은 원호를 따라 평행한 배치이나, 실질적으로 구동 장치의 상 황에서는 직선으로 고려될 수도 있다.
능동 부품 모듈(90)은 2개의 공진기(3, 3')들을 포함하며, 상기 공진기들은 서로에 대해 평행하게 배치되며 실질적으로 도 35의 원리에 따라 각각 작용한다. 공진기(3, 3')의 접촉 영역(7)은 서로에 대해 탄성적으로 배치된 수동 부재(1)의 접촉 판(72)에 결합되며, 스프링 효과에 의해 접촉 영역(7)에 대하여 가압될 수 있다. 공통 가진 수단(4)을 가진할 때에, 상기 2 개의 공진기(3, 3')의 4개의 접촉 영역(7)들은 접촉 판(72)을 구동하는 공간 진동으로 설정되며, 그로 인해 피구동체(82)는 가진 주파수에 따라 일 방향 또는 다른 방향으로 구동시킨다. 일반적으로 진동은 도 35의 실시예와 관련하여 설명되는 바와 같이 3차원의 성분들을 갖는다. 이들 중에는, 공진기(3, 3')의 평면에 평행한 전방 운동과 후방 운동이 이용되며, 대응 주파수는 가진을 위해 선택된다.
능동 부품 모듈(90)의 구조는 다음의 도 38 내지 도 40에 의해 설명된다. 도 38은 일체로 형성된 장착부(32)를 구비한 제1 공진기(3)를 도시한다. 장착부(32)는 공진기(3)로부터 기저부(33) 및 전기 접속을 위한 접촉탭(34)으로 인도된다. 전술한 부품들은 실질적으로 일정한 두께를 갖는 얇은 부품으로부터 일체로 제조되며, 예를 들어 금속 박판을 펀치하여 제조된다. 이러한 부품은 공진기 금속 박판 부품(37)으로 지칭된다. 제2 공진기(3')를 구비한 제2 공진기 금속 박판 부품(37')은 동일한 방식으로 바람직하게 형상화되며, 도 37에 가시되는 바와 같이 제1 공진기(3)에 대해 거울 대칭적으로 배치된다. 제조 비용은 동일한 설계로 인해 감소되며, 2 개의 공진기(3, 3')들의 기계적 특성은 서로 유사하게 유지된다. 각각의 경 우에 있어서, 하나의 접속탭(38)은 기저부(33, 33')들을 대향되게 위치한 공진기(3, 3')로 인도하며, 공진기(3, 3')를 전기 접속하는 역할을 한다.
도 39는 위치 유닛의 부분 조립된 능동 부품 모듈(90)을 도시한다. 운반체 부재(60)는 공진기(3)에 부착되며, 제1 피에조 판(64), 그 위의 중간 전극(62) 및 다시 그 위의 제2 피에조 판(64')은 공진기(3)의 평탄부의 판에 평행한 운반체 부재(60)의 개구부에 배치된다. 피에조 판(64, 64')과 중간 전극(62)은 개구부 또는 상기 개구부 내의 간격 돌기에 의해 중심이 조정되며, 피에조 판(64, 64')은 여전히 진동할 수 있다. 운반체 부재(60)는 사출성형법에 의해 플라스틱으로 제조되는 것이 바람직하다.
도 40은 능동 부품 모듈의 분해 조립도를 도시한다. 이미 언급한 부품들 외에, 제2 공진기 금속 박판 부품(37')도 제시될 뿐만 아니라 코일(35)과 2 접속탭(36, 36')들이 도시된다. 제1 접속탭(36)은 중간 전극(62)의 전기 접속을 위해 배치되며, 제2 접속탭(36')은 코일(35)의 제1 접속부의 전기 접속을 위해 배치된다. 코일(35)의 제2 접속부는 제2 공진기 금속 박판(37')의 접촉탭(34')과 접속한다.
따라서, 능동 부품 모듈(90)은 공진기(3, 3')들 사이의 코일(35) 및 이중 피에조로 형성되는 진동 회로를 포함한다. 중간 전극(62) 주변의 2 평행 판들의 2층 피에조 부재로서의 가진 수단(4)의 구조는 동일한 전위를 갖는 피에조 부재의 외부 전극을 형성하는 공진기(3, 3')를 허여한다. 이어서, 이는 양 공진기(3, 3')의 접촉 영역(7)과 접촉하는 수동 부재(1)가 전기 전도성을 있는 것을 의미한다.
공진기(3, 3')의 장착부(32)가 동시에 전기 접속되므로, 가진 수단(4)을 접속시키기 위한 와이어와 접합이 필요 없다. 장착부(32)는 공진기(3)의 평면 외부로 멀어지게 인도되며, 이는 구동 장치의 바람직한 진동 노드에 대응하는 공진기(3)의 영역에서 바람직하게 실시된다. 본 발명의 실시예에 있어서, 상기 영역은 적어도 피에조 판(6)의 중간에 위치한다. 예를 들어 도 43에 따른 본 발명의 다른 실시예에 있어서, 이러한 영역은 사각 피에조 판(64)의 측면 중간에 위치한다. 양 실시예 모두에 있어서, 공진기(3, 3')의 진동과 피에조 판(64, 64')의 진동은 이러한 방식으로 능동 부품 모듈(90)의 잔류 부품으로부터 분리된다. 전이 영역의 중간 전극(62)은 동일한 목적을 위해 탄성 방식으로 웨이브되며 형성된다. 전이 영역은 피에조 판(64, 64')으로부터 운반체 부재(60)로 이어지며, 중간 전극(62)은 제1 접속탭(36)에 의해 접속된다.
공진기(3,3') 및 피에조 판(64, 64')의 탄성계수는 접착제 및 운반체 부재(60)의 탄성계수보터 몇 배 더 크다. 따라서, 모드와 진동 주파수는 접착제 및 운반체 부재에 의해 실질적으로 영향을 받지 않으나, 대부분 감쇠된다.
바람직하게는, 다음 부품들은 능동 부품 모듈(90)을 제조하기 위해 소정의 순서로 서로 조립된다.
- 제1 공지기(3);
- 운반체 부재(60);
- 제1 피에조 판(64);
- 선택적으로, 중간 전극(62) 및 제2 피에조 판(64'); 및
- 제2 공진기(3').
따라서, 전기 전도성 접착제는 서로에 대해 적용된 부품들 사이에 도포되며, 2 단들 사이에 적어도 부분적으로 도포된다. 접착제는 예를 들어 표준 크기의 미세 니켈 입자를 갖는 접착제이며, 이는 가열에 의해 경화될 수 있다. 접착제의 전도성은 2 전도체가 서로에 대해 가압될 때에만 발생하므로, 니켈 입자는 2 전도체 사이의 간극을 이어준다. 접착제는 다른 방향으로는 비전도성으로 유지된다. 이러한 연유로 인해, 접착제는 전체적으로 도포될 수 있으며, 단락이 발생하지 않은 채 지에조 판(64, 64')의 주변과 피에조 판(64, 64')과 운반체 부재(60) 사이의 중간 공간으로 도포될 수 있다.
따라서, 각각의 경우에 부품들 사이에 접착제를 구비한 전술한 부품들은 서로 적층되며, 이어서 함께 가압되는 중에 가열된다. 경화하는 중에, 접착제는 수축하여 전도체를 하나로 모으므로, 니켈 입자의 지속적인 압력과 그로 인한 영구 전기 접속이 발생한다.
본 발명의 다른 실시예에 있어서, 은과 같은 전도성 재료로 된 플레이크를 갖는 접착제가 사용된다. 이러한 접착제는 모든 방향으로 전도성이 있으며 또한 압력 아래에 있다. 이러한 연유로 인하여, 접착제는 서로 조립되는 부품들 사이의 접촉 영역의 중간에만 도포되며, 각 경우에 있어서 다른 절연 접착제를 구비한 영역에 의해 둘러싸인다.
전술한 부품들은 예를 들어 수동 또는 자동으로 조립 지지부에 삽입된다. 코일(35)은 제2 공진기(3')의 삽입 이전에 지지부로 삽입될 수도 있으며, 이어서 제2 공진기(3')에 접합된다. 바람직하게는, 다른 절차상의 방식에 따르면, 먼저 능동 부품 모듈(90)이 코일 없이 제조되고 접착제가 경화된다. 이어서, 기준으로부터의 편향을 확인하기 위해 능동 부품 모듈(90)의 선택된 전기기계적 특성들이 결정된다. 예를 들어, 사용되며 운동 방향 중 하나에 대응하는 진동 모드는 소정의 이상적인 주파수에 위치하여야 한다는 것이 공지되어 있다. 하지만, 개별 구동 장치에 있어서, 정확한 주파수는 제조상의 오차로 인하여 변화한다. 이상 주파수에서의 가진은 에너지에 관해서는 충분하지 않거나 유효하지 않다. 이러한 연유로 인하여, 주어진 예의 경우에 측정에 의해 소망한 진동 모드에 필요한 실제 고유 주파수를 결정하거나 간접적으로 평가한다. 동일한 방법이 다른 운동 방향에 적용된다. 피에조 부재 또는 가진 수단의 실제 축전용량은 이와 유사하게 측정된다. 피에조 부재-코일의 진동 회로의 고유 주파수는 요구된 가진 주파수 사이의 적어도 대략적인 중간에 위치하며, 그로 인해 진동 회로에 의해 증가하는 전압은 가능한 한 높으며 모든 가진 주파수에서 보상된다. 이에 의하여, 코일(35)의 인덕턴스가 결정되며, 이는 진동 회로의 고유 주파수를 대응되게 설정한다. 가장 인접한 언덕턴스 값을 갖는 소정의 코일은 선택 가능한 코일(35) 집합으로부터 선택되며, 예를 들어 납접 또는 접합에 의해 능동 부품 모듈(90) 상에서 조립된다.
도 41은 본 발명에 따른 수동 부재(2)를 도시한다. 수동 부재는 각각 접촉암(73)을 통해 피구동체(82)에 결합되는 2개의 평행 접속 부재(71)들을 포함한다. 접속 부재(71)들은 공진기(3, 3')의 접촉 영역(7)과 접속 부재(71) 사이의 기계적인 접촉을 최적화하기 위해 접촉 영역(7)을 향해 탄성적으로 배치된다. 접속 부재 들이 접촉 영역(7)에 대해 이동할 수 있도록 하기 위해, 접촉암(73)은 상대적으로 길고 평탄하게 설계된다. 따라서, 접촉암의 표면과 접촉판(72)의 표면은 공진기(3, 3')의 표면에 실질적으로 수직하게 이어지며 구동 장치의 이동 방향에 평행하게 이어진다. 이에 의하면, 제조 공차를 보상하기 위해 능동 부재(2)에 대한 수동 부재(1)의 측면 이동은 접촉판(72)을 서로에 대해 동일하고 평행하게 이동시킴으로써 보상할 수도 있다. 접촉암(73)들은 구동 장치 자체의 이동 방향으로 상대적으로 경화되며, 이로 인해 피구동체(82)로의 동력 전달이 가능하다.
따라서, 접촉판(72)은 접촉 영역(7)에 대해 미세하게 이동될 수 있다. 부가적인 스프링은 접촉 영역(7)에 대한 힘을 가하기 위해 사용된다. 접촉 영역은 접촉판(72)들 사이에 배치될 수 있으며, 본 발명에 있어서 스프링은 일체 스프링 부재(74)에 의해 실현되며, 이는 보우(bow)로서 2개의 접촉판(72)들 주변 외부에서 안내되며, 각각 외부로부터 접촉판(72) 내부로 결합하며, 그로 인해 이를 부분적으로 견인하다. 각 경우에 있어서, 스프링 부재(74)의 단부 표면은 각 접촉판(72)에 바람직하게 접합되거나 납접된다. 스프링 부재(74)의 단부는 접촉판(72)의 탭과 같은 대응 유지 부재에 바람직하게 연결된다. 이로써 부가적인 충격 방지가 발생한다.
접촉판(72)에 대한 접촉암(73)은, 접촉판(72)에 작용하는 2 접촉 영역(7) 사이의 결합선에 수직한 축을 중심으로 접촉판(72)의 비틀림을 허용하는 비틀림 영역(75)을 포함하는 것이 바람직하다. 스프링 부재(74)의 힘이 접촉판 상의 접촉 영역 사이에 결합하는 점과 함께 이러한 운동 능력은 접촉판(72)이 양 접촉 영역상으 로 견인되는 효과를 가지며, 이 경우 미세하게 회전할 수 있으며, 이에 의해 양 접촉 영역(7)과 신뢰성 있게 접촉한다.
결속 영역(76)은 접촉판에 대향되게 위치하는 접촉암(73)의 단부에 형성되며, 피구동체(82)의 대응 개구부에 삽입된다. 접촉판(72) 및 결속 영역(76)을 구비한 접촉암(73)은 바람직하게는 일체로 형성되며 펀칭 또는 굽힘에 의해 금속 박판 부품으로부터 형성된다.
도 42는 능동 부품 모듈이 없고 제거 리드 부품(84)을 갖는 위치 유닛을 도시한다. 스프링 부재(74)로 형성되는 수동 부재(1), 접촉판(72) 및 결속 영역(76)을 갖는 접촉암(73)이 피구동체(82)에 배치되는 것은 명백하다. 노크와 충격을 방지하기 위해 가요성 접촉암(73)의 과도한 운동을 방지하기 위하여, 접촉암(73)은 피구동체(82) 주변 슬롯 내부로 부분적으로 안내되지만 자유롭게 설정된다. 따라서, 통상적인 작동 중에 접촉암(73)은 슬롯의 측벽을 접촉하며, 노크에 의하면 접촉암(73)은 항복점을 넘어 적재되는 것이 방지되거나, 또는 잘못된 위치에서 엉키거나 걸리는 것을 방지한다.
게다가, 피구동체(82)가 기초 보체(83)의 2 지주(86)들 사이에서 평행하게 안내된다. 각각의 지주(86)는 구동 지지부(87)에 대한 슬롯을 포함한다. 능동 부품 모듈(90)의 조립 중에, 능동 부품 모듈(90)의 대응 부재는 이들 슬롯 내에서 이동 가능하다. 합쳐진 제조 공차로 인한 부정확은 이에 의해 보상될 수 있으며, 능동 부품 모듈(90)은 결합탭(36, 36')이 기초 본체(83)와 접촉할 때까지 기초 본체(83에 대해 가압된다.
도 43 및 도 44은 능동 부품 모듈의 다른 실시예를 도시한다. 도 43은 전술한 바와 같이 피에조 판(64, 64')의 일 측면의 중간 영역에서 공진기(3, 3')를 측면으로 장착한다. 따라서, 제1 공진기(3)는 일 측면에서만 장착되며, 양 측면 상의 제2 공진기(3')는 적어도 대략적인 중심에서 장착된다. 운반체 부재(60)는 제1 결합탭(36)을 접촉탭(34) 또는 기초 부재(33)로 절연 결속하는 역할을 한다. 이를 위해, 제2 결합탭(36)에 따르면, 금속 박판 부품은 운반체 부재(60)의 플라스틱 핀에 가해지며 리벳 체결된다. 도 44는 또 다른 탄성 없이 피구동체(82)(미도시)에 직접 결속되는 수동 부재(1)의 접촉판(72)과, 중간 전극(62)의 양측 장착부를 도시한다. 공진기 금속 박판 부품(37, 37'), 중간 전극(62) 및 결합탭(36, 36')을 결합하는 운반체 부재(60)는 내부 구조가 가시되도록 하기 위해 도시되지 않는다.
도 45는 접촉 영역(7)이 외부로부터 작용하는 본 발명의 또 다른 실시예를 개략적으로 도시한다. 장착부(32)와 가진 수단(4)은 기본적으로 앞선 실시예와 같이 형성되며, 대응하게 변화될 수 있다. 또한, 동일하게 형성된 몇 개의 공진기(3)들은 서로 평행하게 배치될 수 있다. 구동 장치에 대한 진동 효과도 하나 또는 몇 개의 공진기(3)에 평행한 평면에서 주로 이어진다. 하지만, 접촉 영역(7)은 내부가 아닌 외부로 지향된다. 이것은 수동 부재(1)가 특히 가진 수단(4)과 장착부(32)의 영역에서 특히 능동 부재(2)를 둘러싸는 것을 가능하게 한다. 수동 부재(1)의 더 긴 이동 거리는 이에 의해 달성될 수 있다.
수동 부재(1)는 그 자체로 탄성적이며 능동 부재(1)에 대해 탄성적으로 배치될 수도 있다. 이를 위해, 접촉 부재(71) 그 자체는 전체 길이를 통해 탄성적인 방 식으로 형성될 수 있거나, 또는 접촉 암(73) 및/또는 접촉 부재(71)를 결합하는 피구동체(82)의 부품은 탄성적인 방식으로 형성된다.
도 46은 접촉 영역(7)이 외부로 작용하는 본 발명의 또 다른 실시예의 능동 부품 모듈을 도시한다. 여기서도, 피에조 부재(4)의 전극으로서 공진기 금속 박판 부품(37, 37')은 피에조 표면에 배치되며 피에조 표면에 평행하게 이어진다. 하지만, 구동 장치를 위한 진동 효과는 금속 박판 평면에 수직한 평면에서 주로 이어진다. 공진기(3, 3')의 장착은 공진기(3, 3')의 종방향 축에 수직한 피에조 부재(4)의 중간 양 측면에서 실시되며, 마찬가지로 전기 접속된다. 각각의 경우에 장착은 일체로 형성된 접촉탭(34)으로 이어진다. 중간 전극이 없는 하나의 피에조 부재(4)의 사용에 따르면, 2개의 공진기(3, 3')들은 다양한 전위에 놓이게 되며, 이로 인해 서로에 대해 전기적으로 절연된 수동 부재(1)의 2 부품들은 공진기와 접촉하게 된다. 수동 부재(1)는 여기에 도시되어 있지 않으며, 수동 부재는 외부로부터 접촉 영역(7)을 둘러싼다. 코일(35) 이외에, 능동 부품 모듈(90) 또한 접촉탭(34, 34')들 중 하나뿐만 아니라 또 다른 접속부에 전기적으로 접속되는 센서(39)를 포함한다. 센서는 피구동체(82)(미도시)의 위치를 측정하는 역할을 하며, 이는 예를 들어 광학, 전기 용량 또는 유도성 등의 작업 원리에 따라 측정한다.
도 47은 공진기(3)가 슬롯이 형성되고 평탄한 금속 박판 부품을 포함하는 본 발명의 또 다른 실시예를 도시한다. 슬롯은 예를 들어 2개의 평행한 실질적으로 사각 암(6)으로 분리하며, 그 사이에 수동 부재(1)가 고정된다. 각각의 경우에 있어서, 암(6)은 수동 부재(1)를 수용하기 위하여 수동 부재(1)의 단면 형상에 대응하 는 슬롯의 확장부를 일 지점에 포함한다. 접촉 영역(7)은 이러한 확장부에 형성된다. 수동 부재(1)의 운동은, 바람직하게는 암(6)의 평면에 수직하게 이어지는 축을 따라 또는 축을 중심으로 선형 및/또는 회전 운동을 한다.
도 48은 본 발명의 또 다른 실시예를 도시하는데, 공진기(3)는 평탄하고 비굴곡이며 바람직하게는 사각형 단편만으로 구성되는 2개의 별도의 암(6)을 포함한다. 결합 영역(10)은 예를 들어 평행 6면체 더미를 형성하는 하나 또는 그 이상의 피에조결정체로 된 피에조 부재인 가진 수단(4)을 포함한다. 암(6)은 피에조 부재의 대향되게 놓인 평행한 표면에 결속되며, 동일한 방향으로 서로에 대해 평행하게 연장한다. 자유 단부에서의 수동 부재(1)는 암(6)들 사이에 배치된다. 도면의 수동 부재(1)는 회전식 원통형으로서 도시되지만, 다른 원통형 또는 프리즘 형태일 수 있으며 암(6)들 사이에 고정된 평탄한 판일 수도 있다. 수동 부재(1)의 운동은 암(6)의 평면에 평행하며, 바람직하게는 결합 영역(10)에서 볼 때 암이 연장하는 방향에 수직하다. 하지만, 수동 부재의 운동은 상기 방향에 평행하거나 비스듬히 이어질 수도 있다. 다른 변형예에서는 오직 하나의 암(6)만이 존재할 수도 있다.
도 47 및 도 48에 따른 실시예에 따르면, 수동 부재(1)는 암(6)들 사이의 외주에서 돌출하는 회전 가능하게 돌출하는 선택적인 디스크 또는 링이다. 이에 따르면, 간단한 회전식 구동 장치는 더 단순한 방식으로도 실현될 수 있다.
도 35 내지 도 47에 따른 본 발명의 실시예에 있어서, 피에조 부재는 d31 모드로 작동되는 것이 바람직하다.
본 발명은 구동 유닛, 구동 방법, 구동 유닛을 위한 부품 모듈을 제조하기 위한 제조 방법, 및 광학 부재를 위치시키기 위한 위치 유닛에 이용될 수 있다.
Claims (60)
- 수동 부재(1)에 대한 능동 부재(2)의 운동을 위한 구동 유닛으로서,능동 부재(2)는 공진기(3) 및 공진기(3)의 진동을 가진하기 위한 적어도 하나의 가진 수단(4)을 포함하며, 공진기(3)는 수동 부재(1)에 힘을 가하기 위한 접촉 영역(7)을 포함하며, 능동 부재(2)는 접촉 영역(7)의 진동 운동에 의해 수동 부재(1)에 대해 구동될 수 있는 구동 유닛에 있어서,공진기(3)는 적어도 2개의 암(6)을 포함하며, 공진기(3)의 결합 영역(10)으로부터 연장되는 적어도 2개의 암(6)들은 공진기(3)의 동일 측면에 형성되며, 접촉 영역(7)들은 암(6)들의 외부 단부에 각각 형성되며, 접촉 영역(7)들은 암 페어(5)의 진동 운동에 의해 서로를 향해 또는 서로로부터 멀어지게 이동 가능하며, 그로 인해 능동 부재(2)에 대한 수동 부재(1)의 상대 운동이 실시될 수 있으며, 수동 부재(1)는 자체적으로 탄성을 갖는 것을 특징으로 하는 구동 유닛.
- 제1항에 있어서,능동 부재의 제1 암의 접촉 영역과 접촉하는 수동 부재의 제1 부재와, 능동 부재의 제2 암의 접촉 영역과 접촉하는 수동 부재의 제2 부재가 서로에 대해 탄성적으로 움직이도록 배치되는 것을 특징으로 하는 구동 유닛.
- 제1항 또는 제2항에 있어서,운동축(11)에 수직하며 공진기(3)의 평면 내에서 접촉 영역(7)의 영역에서의 운동에 대해 수동 부재(1)는, 공진기(3)의 스프링 상수보다 100배 이상 작은 스프링 상수를 갖는 것을 특징으로 하는 구동 유닛.
- 제1항 또는 제2항에 있어서,수동 부재(1)는 일체로 형성되는 것을 특징으로 하는 구동 유닛.
- 제1항 또는 제2항에 있어서,수동 부재(1)는 하나 초과의 부품을 포함하도록 형성되며, 접촉 영역(7)으로부터 피구동체(82)로 구동력을 전달하기 위한 적어도 2개의 접촉 부재(71)들 뿐만 아니라, 접촉 영역(7)에 반대 방향으로 접촉 부재(71)들을 가압하는 적어도 하나의 스프링 부재(74)를 포함하는 것을 특징으로 하는 구동 유닛.
- 제5항에 있어서,수동 부재(1)는 피구동체(82)에 탄성적으로 움직이도록 결합되는 것을 특징으로 하는 구동 유닛.
- 제6항에 있어서,수동 부재(1)의 접촉 부재(71)와 피구동체(82) 사이의 탄성 결합부(73)가 구동력을 전달하기 위해 수동 부재(1)의 접촉판(72)과 일체로 형성되는 것을 특징으로 하는 구동 유닛.
- 제7항에 있어서,탄성 결합부(73)는 구동력을 전달하기 위한 방향으로는 탄성적으로 움직이지 않으며, 이 방향에 수직한 방향으로는 탄성적으로 움직이는 것을 특징으로 하는 구동 유닛.
- 제7항에 있어서,충격의 경우에 손상을 막기 위하여 탄성 결합부(73)의 운동을 제한하기 위한 수단을 포함하는 것을 특징으로 하는 구동 유닛.
- 제5항에 있어서,수동 부재(1)는 능동 부재의 접촉 영역(7)과 접촉하기 위한 2개의 평행 접촉 부재(71)를 포함하며, 접촉 부재(71)는 각각 탄성 결합부(73)를 통해 피구동체(82)에 결합되는 것을 특징으로 하는 구동 유닛.
- 광학 부재를 위치시키기 위한 위치 결정 유닛으로서,기초 본체(83) 및 이에 대해 이동 가능한 피구동체(82)를 포함하며, 상기 피구동체(82)는 광학 부재를 운반하는 위치 결정 유닛에 있어서,위치 결정 유닛은 제1항 또는 제2항에 따른 구동 유닛을 포함하는 것을 특징으로 하는 위치 결정 유닛.
- 제1항 또는 제2항에 있어서,운동축(11)에 수직하며 공진기(3)의 평면 내에서 접촉 영역(7)의 영역에서의 운동에 대해 수동 부재(1)는, 공진기(3)의 스프링 상수보다 1000배 이상 작은 스프링 상수를 갖는 것을 특징으로 하는 구동 유닛.
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CH01066/04A CH696993A5 (de) | 2004-06-24 | 2004-06-24 | Antriebseinheit. |
| CH1066/04 | 2004-06-24 | ||
| CH21672004 | 2004-12-30 | ||
| CH2167/04 | 2004-12-30 | ||
| PCT/CH2005/000343 WO2006000118A1 (de) | 2004-06-24 | 2005-06-21 | Antriebseinheit |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20070072851A KR20070072851A (ko) | 2007-07-06 |
| KR101175823B1 true KR101175823B1 (ko) | 2012-08-24 |
Family
ID=34970098
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020077001542A KR101175823B1 (ko) | 2004-06-24 | 2005-06-21 | 구동 유닛 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US7429812B2 (ko) |
| EP (2) | EP2200102B1 (ko) |
| JP (2) | JP4690398B2 (ko) |
| KR (1) | KR101175823B1 (ko) |
| CN (1) | CN101019301B (ko) |
| CH (1) | CH696993A5 (ko) |
| DE (1) | DE502005007466D1 (ko) |
| HK (1) | HK1109247A1 (ko) |
| WO (1) | WO2006000118A1 (ko) |
Families Citing this family (57)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005077669A (ja) | 2003-08-29 | 2005-03-24 | Canon Inc | 画像形成装置 |
| FI118215B (fi) | 2005-09-27 | 2007-08-31 | Kone Corp | Hissijärjestelmä |
| DE102006004194B3 (de) * | 2006-01-27 | 2007-05-31 | Ief Werner Gmbh | Elektromechanischer Antrieb mit Piezomotor |
| EP1992024A2 (de) * | 2006-02-16 | 2008-11-19 | nanoswys SA | Kraftumsetzer |
| DE102007005041B4 (de) * | 2007-01-26 | 2011-09-22 | Elliptec Resonant Actuator Ag | Piezomotor mit Federungseinrichtung |
| CH699707A2 (de) * | 2008-10-10 | 2010-04-15 | Creaholic Sa | Miniaturisierte angetriebene lagerungsvorrichtung. |
| JP5426897B2 (ja) * | 2009-02-24 | 2014-02-26 | 太平洋セメント株式会社 | 駆動装置 |
| JP5835212B2 (ja) | 2010-03-31 | 2015-12-24 | 株式会社ニコン | モータ装置、モータ装置の製造方法及びロボット装置 |
| DE102011109590A1 (de) * | 2011-08-05 | 2013-02-07 | Physik Instrumente (Pi) Gmbh & Co. Kg | Piezoelektrischer Drehantrieb für eine Welle |
| FR2994134B1 (fr) * | 2012-08-03 | 2014-08-08 | Faurecia Sieges Automobile | Siege de vehicule comportant une partie reglable motorisee, unite electrique de commande de vehicule automobile |
| JP6084061B2 (ja) * | 2013-02-15 | 2017-02-22 | 並木精密宝石株式会社 | 振動アクチュエータ |
| US9479031B2 (en) * | 2013-03-08 | 2016-10-25 | Mts Sensor Technologie Gmbh & Co. Kg | Tubular linear motor with magnetostrictive sensor |
| DE102013212053A1 (de) * | 2013-06-25 | 2015-01-08 | Robert Bosch Gmbh | Leiterplatte mit einem schwingungsentkoppelten elektronischen Bauelement |
| JP6245273B2 (ja) | 2013-11-27 | 2017-12-13 | 株式会社村田製作所 | 駆動装置 |
| CN103701359B (zh) * | 2013-12-09 | 2015-09-16 | 浙江大学 | 一种基于压电堆的压电振动冲击的旋转电机 |
| CH709292A3 (de) * | 2014-02-20 | 2015-10-15 | Miniswys Sa | Positioniervorrichtung für einen Bildstabilisator. |
| JP6543951B2 (ja) * | 2015-02-18 | 2019-07-17 | セイコーエプソン株式会社 | 圧電駆動装置、ロボット、及び、それらの駆動方法 |
| WO2016187211A1 (en) * | 2015-05-19 | 2016-11-24 | The Regents Of The University Of California | Dna structured linear actuator |
| CN105141174B (zh) * | 2015-09-07 | 2017-10-31 | 南京航空航天大学 | 一种贴片式驻波旋转型压电作动器 |
| CN105141101B (zh) * | 2015-09-28 | 2018-04-20 | 北京航空航天大学 | 一种基于电磁原理的梁式微驱动器 |
| EP3468028A1 (en) * | 2017-10-04 | 2019-04-10 | miniswys SA | Piezoelectric drive unit |
| EP3537593B1 (fr) * | 2018-03-09 | 2024-04-24 | ETA SA Manufacture Horlogère Suisse | Dispositif de rotation d'une roue dentée |
| EP3537232A1 (fr) * | 2018-03-09 | 2019-09-11 | ETA SA Manufacture Horlogère Suisse | Moteur piezoélectrique rotatif pour disque |
| EP3537594A1 (fr) * | 2018-03-09 | 2019-09-11 | ETA SA Manufacture Horlogère Suisse | Moteur piezoelectrique rotatif a precontrainte radiale |
| EP3537591B1 (fr) * | 2018-03-09 | 2020-11-18 | ETA SA Manufacture Horlogère Suisse | Moteur piezoelectrique rotatif a precontrainte axiale |
| EP3537595A1 (fr) * | 2018-03-09 | 2019-09-11 | ETA SA Manufacture Horlogère Suisse | Moteur piezoélectrique linéaire à course allongée |
| CN108880323B (zh) * | 2018-06-15 | 2019-08-06 | 福建工程学院 | 一种转速转矩可变的压电电机及其使用方法 |
| KR102549849B1 (ko) * | 2018-08-13 | 2023-06-29 | 미니스뷔스 에스에이 | 렌즈 구동 장치, 카메라 모듈, 및 카메라 탑재 장치 |
| CN111258057A (zh) * | 2018-11-30 | 2020-06-09 | 成都理想境界科技有限公司 | 一种扫描驱动器及光纤扫描器 |
| CN113544966A (zh) | 2019-02-22 | 2021-10-22 | 高压马达乌普萨拉有限公司 | 机电马达和包括机电马达的可调谐滤波器 |
| JP7436469B2 (ja) * | 2019-05-10 | 2024-02-21 | ミニスイス・ソシエテ・アノニム | レンズ駆動装置、カメラモジュール、及びカメラ搭載装置 |
| EP3736965A1 (en) | 2019-05-10 | 2020-11-11 | Miniswys Sa | Drive unit and method for operating a drive unit |
| JP2022532184A (ja) * | 2019-05-10 | 2022-07-13 | ミニスイス・ソシエテ・アノニム | 駆動ユニット、および駆動ユニットを動作させるための方法 |
| JP7294897B2 (ja) * | 2019-06-07 | 2023-06-20 | ミニスイス・ソシエテ・アノニム | レンズ駆動装置、カメラモジュール、及びカメラ搭載装置 |
| EP3787178A1 (en) | 2019-08-30 | 2021-03-03 | Miniswys Sa | Piezoelectric drive unit |
| CN112492130B (zh) * | 2019-09-12 | 2021-10-01 | 华为技术有限公司 | 摄像模组及移动终端 |
| CN110601597B (zh) * | 2019-09-24 | 2022-07-15 | 太原科技大学 | 一种双模态复合型尺蠖超声波电机 |
| CN114788159A (zh) | 2019-12-13 | 2022-07-22 | 米尼斯怀斯股份公司 | 驱动单元的动作方法及控制器 |
| EP3836390A1 (en) | 2019-12-13 | 2021-06-16 | Miniswys Sa | Method for operating a drive unit and drive unit |
| CN111181490B (zh) * | 2020-01-02 | 2022-02-11 | 西安交通大学 | 一种基于超谐同步技术的硅微谐振式倍频器 |
| CN118091877A (zh) * | 2020-03-30 | 2024-05-28 | 三美电机株式会社 | 光学元件驱动装置、摄像机模块及摄像机搭载装置 |
| US20230143336A1 (en) * | 2020-04-16 | 2023-05-11 | Miniswys Sa | Drive unit |
| KR20230007324A (ko) * | 2020-04-17 | 2023-01-12 | 미쓰미덴기가부시기가이샤 | 광학 소자 구동 장치, 카메라 모듈 및 카메라 탑재 장치 |
| CN112165273B (zh) * | 2020-09-24 | 2021-11-30 | 南京工程学院 | 基于同向偏心约束和斜压电陶瓷的耦合模态型超声波电机 |
| DE102020126863A1 (de) * | 2020-10-13 | 2022-04-14 | Physik Instrumente (PI) GmbH & Co KG | Stellvorrichtung und verfahren zu deren montage |
| WO2022113510A1 (ja) * | 2020-11-24 | 2022-06-02 | ミツミ電機株式会社 | 光学素子駆動装置、カメラモジュール、及びカメラ搭載装置 |
| CN114915704B (zh) * | 2021-02-09 | 2023-04-21 | 宁波舜宇光电信息有限公司 | 套筒组件、摄像模组及其运行方法和移动电子设备 |
| CN115037849B (zh) * | 2021-03-04 | 2023-06-09 | 宁波舜宇光电信息有限公司 | 感光组件、摄像模组、移动电子设备以及光学防抖方法 |
| CN113131786B (zh) * | 2021-04-08 | 2023-02-24 | 合肥工业大学 | 一种旋转压电马达 |
| EP4075661A1 (en) * | 2021-04-15 | 2022-10-19 | Miniswys Sa | Oscillating drive element and drive unit |
| WO2022218989A1 (en) * | 2021-04-15 | 2022-10-20 | Miniswys Sa | Oscillating drive element and drive unit |
| DE102021116325B3 (de) | 2021-06-24 | 2022-09-29 | Physik Instrumente (PI) GmbH & Co KG | Elektromechanischer Antrieb mit ebenem Versteifungskörper |
| JP2023043037A (ja) * | 2021-09-15 | 2023-03-28 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッド | 超音波モータ |
| DE102021130298A1 (de) | 2021-11-19 | 2023-05-25 | Physik Instrumente (PI) GmbH & Co KG | Ultraschallantrieb |
| CN116683789A (zh) | 2022-02-22 | 2023-09-01 | 新思考电机有限公司 | 压电超声波马达、光学构件驱动装置、照相机装置及电子设备 |
| DE102022112809A1 (de) * | 2022-05-20 | 2023-11-23 | Physik Instrumente (PI) GmbH & Co KG | Antriebsvorrichtung, Antriebssystem, Stellsystem und Antriebsmotor |
| EP4311097A1 (en) | 2022-07-22 | 2024-01-24 | Miniswys Sa | Shock resistant drive unit |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6074982A (ja) | 1983-09-30 | 1985-04-27 | Hitachi Maxell Ltd | 強力音叉を用いたリニアモ−タ |
| JP2002101676A (ja) | 2000-09-25 | 2002-04-05 | Minolta Co Ltd | アクチュエータ |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU773715A1 (ru) * | 1979-04-12 | 1980-10-23 | Предприятие П/Я А-3593 | Устройство дл транспортировани носител записи |
| JPH06101941B2 (ja) * | 1986-05-09 | 1994-12-12 | 株式会社村田製作所 | リニア駆動モ−タ |
| JPH03120694U (ko) * | 1990-03-19 | 1991-12-11 | ||
| DE4326479C2 (de) * | 1993-08-06 | 2000-09-28 | Daimler Chrysler Ag | Aktuator für ein bewegbares Element |
| JPH0880069A (ja) * | 1994-09-06 | 1996-03-22 | Hitachi Ltd | 駆動装置 |
| RU2101840C1 (ru) * | 1996-06-10 | 1998-01-10 | Санкт-Петербургская государственная академия аэрокосмического приборостроения | Шаговый двигатель |
| JP3190634B2 (ja) | 1999-01-05 | 2001-07-23 | セイコーインスツルメンツ株式会社 | 圧電アクチュエータおよび圧電アクチュエータの駆動方法並びに圧電アクチュエータの駆動方法をコンピュータに実行させるプログラムを格納した、コンピュータが読取可能な記憶媒体 |
| WO2001022480A1 (fr) * | 1999-09-20 | 2001-03-29 | Nikon Corporation | Mecanisme a attelages paralleles, systeme d'exposition et procede de fabrication, et procede de fabrication de dispositifs |
| DE50014572D1 (de) | 1999-11-29 | 2007-09-27 | Miniswys Sa | Piezoelektrischer antrieb |
| US6664714B2 (en) * | 2000-03-23 | 2003-12-16 | Elliptec Resonant Actuator Ag | Vibratory motors and methods of making and using same |
| DE10113660A1 (de) * | 2001-03-21 | 2002-09-26 | Koninkl Philips Electronics Nv | Piezoelektrischer Antrieb |
| JP4613006B2 (ja) | 2001-06-06 | 2011-01-12 | ミニスイス・ソシエテ・アノニム | 圧電駆動装置 |
| JP4033643B2 (ja) * | 2001-06-18 | 2008-01-16 | 日本碍子株式会社 | 圧電/電歪デバイスおよびその製造方法 |
| JP4669222B2 (ja) * | 2001-10-22 | 2011-04-13 | ミニスイス・ソシエテ・アノニム | 圧電駆動装置 |
| GB0128591D0 (en) * | 2001-11-29 | 2002-01-23 | 1 Ltd | Mounting system |
| WO2003079462A2 (de) | 2002-03-15 | 2003-09-25 | Creaholic S. A. | Piezoelektrischer motor und verfahren zum antrieb desselben |
| JP4574206B2 (ja) * | 2003-04-25 | 2010-11-04 | キヤノン株式会社 | 駆動装置、それを用いた露光装置、デバイスの製造方法 |
-
2004
- 2004-06-24 CH CH01066/04A patent/CH696993A5/de not_active IP Right Cessation
-
2005
- 2005-06-21 DE DE502005007466T patent/DE502005007466D1/de active Active
- 2005-06-21 KR KR1020077001542A patent/KR101175823B1/ko active IP Right Grant
- 2005-06-21 JP JP2007516936A patent/JP4690398B2/ja active Active
- 2005-06-21 CN CN2005800286224A patent/CN101019301B/zh active Active
- 2005-06-21 EP EP09007383A patent/EP2200102B1/de active Active
- 2005-06-21 WO PCT/CH2005/000343 patent/WO2006000118A1/de active Application Filing
- 2005-06-21 EP EP05750589A patent/EP1761999B1/de active Active
-
2006
- 2006-12-21 US US11/643,297 patent/US7429812B2/en active Active
-
2007
- 2007-12-13 HK HK07113605.3A patent/HK1109247A1/xx unknown
-
2008
- 2008-06-18 JP JP2008159279A patent/JP4700084B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6074982A (ja) | 1983-09-30 | 1985-04-27 | Hitachi Maxell Ltd | 強力音叉を用いたリニアモ−タ |
| JP2002101676A (ja) | 2000-09-25 | 2002-04-05 | Minolta Co Ltd | アクチュエータ |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20070072851A (ko) | 2007-07-06 |
| JP4690398B2 (ja) | 2011-06-01 |
| HK1109247A1 (en) | 2008-05-30 |
| DE502005007466D1 (de) | 2009-07-23 |
| US20070164635A1 (en) | 2007-07-19 |
| WO2006000118A1 (de) | 2006-01-05 |
| CN101019301B (zh) | 2011-07-06 |
| JP4700084B2 (ja) | 2011-06-15 |
| EP1761999A1 (de) | 2007-03-14 |
| CN101019301A (zh) | 2007-08-15 |
| US7429812B2 (en) | 2008-09-30 |
| EP2200102B1 (de) | 2012-06-20 |
| EP1761999B1 (de) | 2009-06-10 |
| JP2008503995A (ja) | 2008-02-07 |
| EP2200102A1 (de) | 2010-06-23 |
| CH696993A5 (de) | 2008-02-29 |
| JP2008220171A (ja) | 2008-09-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101175823B1 (ko) | 구동 유닛 | |
| CN100514692C (zh) | 线性超声波电机 | |
| US7129620B2 (en) | Vibration wave linear motor and lens implement using vibration wave linear motor | |
| US7129621B2 (en) | Vibration wave linear motor and lens implement using vibration wave linear motor | |
| US6836057B2 (en) | Drive mechanism employing electromechanical transducer | |
| KR100701722B1 (ko) | 근-공진 전기기계 모터 | |
| US7911112B2 (en) | Ultrasonic actuator | |
| US7642696B2 (en) | Vibration actuator and drive unit including the same | |
| US7644619B2 (en) | Piezoelectric vibrator and ultrasonic motor having piezoelectric vibrator | |
| CN101589481A (zh) | 用于产生电压的自容式压电设备 | |
| US8013495B2 (en) | Stator and piezo ultrasonic motor including the same | |
| US8314533B2 (en) | Vibratory actuator | |
| EP2448103A2 (en) | Dome-shaped piezoelectric linear motor | |
| US7187103B2 (en) | Piezoelectric drive | |
| CN111051235A (zh) | Mems振动元件、mems振动元件的制造方法及振动发电元件 | |
| KR20080093681A (ko) | 압전 진동자 및 이를 포함하는 압전 엑츄에이터 | |
| KR100835097B1 (ko) | 렌즈 이송장치 | |
| EP4275462B1 (en) | Mounting arrangement for piezo motor element | |
| KR20040102367A (ko) | 압전모터 | |
| KR100550900B1 (ko) | 금속 튜브형 압전 초음파 모터의 지지구조 | |
| CN118100684A (zh) | 一种压电马达、摄像模组和电子设备 | |
| JP2007143248A (ja) | 圧電アクチュエータおよび機器 | |
| JPH0974234A (ja) | 圧電アクチュエータ | |
| JP2001314093A (ja) | 振動アクチュエータおよびそれを用いたステージ。 | |
| JPH04138080A (ja) | 超音波モータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20150806 Year of fee payment: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20160804 Year of fee payment: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20170803 Year of fee payment: 6 |
|
| FPAY | Annual fee payment |
Payment date: 20180802 Year of fee payment: 7 |