JP7635668B2 - 自律走行車両、情報処理方法、及びプログラム - Google Patents
自律走行車両、情報処理方法、及びプログラム Download PDFInfo
- Publication number
- JP7635668B2 JP7635668B2 JP2021126916A JP2021126916A JP7635668B2 JP 7635668 B2 JP7635668 B2 JP 7635668B2 JP 2021126916 A JP2021126916 A JP 2021126916A JP 2021126916 A JP2021126916 A JP 2021126916A JP 7635668 B2 JP7635668 B2 JP 7635668B2
- Authority
- JP
- Japan
- Prior art keywords
- image data
- internal
- external
- imaging mode
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/40—Scaling of whole images or parts thereof, e.g. expanding or contracting
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/42—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by implementation details or hardware specially adapted for video compression or decompression, e.g. dedicated software implementation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/183—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a single remote source
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Description
自律走行車両の外部を撮像した第一の画像データ、または、前記自律走行車両の内部を撮像した第二の画像データの少なくとも一方の画像データを送信するときに、送信する画像データに応じて、送信する画像データの容量を変えること、
を実行する制御部を有する情報処理装置である。
コンピュータが、
自律走行車両の外部を撮像した第一の画像データ、または、前記自律走行車両の内部を撮像した第二の画像データの少なくとも一方の画像データを送信するときに、送信する画像データに応じて、送信する画像データの容量を変えること、
を実行する情報処理方法である。
コンピュータに、
自律走行車両の外部を撮像した第一の画像データ、または、前記自律走行車両の内部を撮像した第二の画像データの少なくとも一方の画像データを送信するときに、送信する画像データに応じて、送信する画像データの容量を変えること、
を実行させるためのプログラムである。
することができる。そのため、車両の内部の乗客の様子をより確実に把握することができる。このときの第二の画像データの容量は、例えば、乗客の顔の表情が分かる程度の容量であればよい。
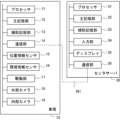
図1は、本実施形態に係るシステム1の概略構成を示す図である。システム1は、与えられた運行指令に基づいて自律走行を行う自律走行車両10(以下、単に車両10ともいう。)と、当該運行指令を発行し車両10を監視するセンタサーバ30とを含んでいる。なお、図1に示すシステム1には、例示的に1台の車両10を含んでいるが、車両10は複数存在し得る。車両10は、例えば、客を乗せて所定の経路を移動する車両である。所
定の経路は、バスなどのように予め決まった経路であってもよく、タクシーなどのように乗客の要望に基づいて決めた経路であってもよい。
演算を行う。主記憶部32は、RAM(Random Access Memory)、ROM(Read Only Memory)等である。補助記憶部33は、EPROM(Erasable Programmable ROM)、ハー
ドディスクドライブ(HDD、Hard Disk Drive)、リムーバブルメディア等である。補
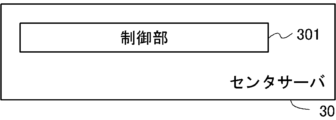
助記憶部33には、オペレーティングシステム(Operating System :OS)、各種プログラム、各種テーブル等が格納される。補助記憶部33に格納されたプログラムをプロセッサ31が主記憶部32の作業領域にロードして実行し、このプログラムの実行を通じて各構成部等が制御される。これにより、所定の目的に合致した機能をセンタサーバ30が実現する。主記憶部32および補助記憶部33は、コンピュータで読み取り可能な記録媒体である。なお、センタサーバ30は、単一のコンピュータであってもよいし、複数台のコンピュータが連携したものであってもよい。また、補助記憶部33に格納される情報は、主記憶部32に格納されてもよい。また、主記憶部32に格納される情報は、補助記憶部33に格納されてもよい。
、1つのタッチパネルディスプレイとして構成してもよい。
19を有する。これらは、バスにより相互に接続される。プロセッサ11、主記憶部12、及び、補助記憶部13は、センタサーバ30のプロセッサ31、主記憶部32、及び、補助記憶部33と同様であるため、説明を省略する。なお、プロセッサ11は、制御部の一例である。また、主記憶部32または補助記憶部33は、記憶部の一例である。
)、Wi-Fi(登録商標)、または、Bluetooth(登録商標)等の無線通信を利用して、ネットワークN1経由で他の装置(例えばセンタサーバ30等)と通信を行うための回路である。
、無線通信部等である。位置情報センサ15で取得された情報は、例えば、補助記憶部13等に記録され、センタサーバ30に送信される。
撮像を行い、内部画像データのみをセンタサーバ30に送信する撮像モードである。また、外内部撮像モードは、外部カメラ18及び内部カメラ19の両方で撮像を行い、外部画像データ及び内部画像データの両方をセンタサーバ30に送信する撮像モードである。
部画像データが全てディスプレイ35に表示されるように、制御部301が複数の外部画像データを出力してもよい。例えば、車両10が4つの外部カメラ18を備える場合には、ディスプレイ35を四分割して4つの外部画像データを夫々出力してもよい。また、制御部301は、複数の外部画像データのうち、管理者が入力部34を介して選択した外部画像データをディスプレイ35に拡大表示してもよい。また、ディスプレイ35を複数有する場合に、各ディスプレイ35に異なる外部画像データを表示させてもよい。
では、前述のステップS205で調整される内部画像データの解像度よりも高くなるように、且つ、前述のステップS302で調整される外部画像データの解像度よりも高くなるように、内部画像データの解像度を調整する。内部画像データ送信処理に対応する内部画像データの解像度は、予め定められていてもよい。ステップS403では、撮像部102は、解像度を調整した内部画像データをエンコードする。ステップS404において撮像部102は、エンコード後の内部画像データをセンタサーバ30へ送信する。
上記の実施形態はあくまでも一例であって、本開示はその要旨を逸脱しない範囲内で適宜変更して実施し得る。
カード、フラッシュメモリ、光学式カード、電子的命令を格納するために適した任意のタイプの媒体を含む。
10 自律走行車両
11 プロセッサ
12 主記憶部
13 補助記憶部
18 外部カメラ
19 内部カメラ
30 センタサーバ
Claims (9)
- プロセッサ、外部カメラ及び内部カメラを備える自律走行車両であって、
前記プロセッサは、
撮像モードが外部撮像モードである場合、前記外部カメラにより前記自律走行車両の外部を撮像することで得られた外部画像データをサーバに送信すること、
前記撮像モードが内部撮像モードである場合、前記内部カメラにより前記自律走行車両の内部を撮像することで得られた内部画像データを前記サーバに送信すること、並びに
前記撮像モードが外内部撮像モードである場合、前記外部画像データ及び前記内部画像データを前記サーバに送信すること、
を実行するように構成され、
前記外部撮像モードで前記外部画像データを撮像する時の解像度は、前記内部撮像モードで前記内部画像データを撮像する時の解像度よりも予め低く設定されており、かつ
前記外内部撮像モードで前記内部画像データを撮像する時の解像度は、前記内部撮像モードで前記内部画像データを撮像する時の解像度よりも予め低く設定されている、
自律走行車両。 - 前記プロセッサは、前記外部画像データ及び前記内部画像データを所定の圧縮率で圧縮する、
請求項1に記載の自律走行車両。 - 前記外部画像データ又は前記内部画像データには、複数の画像データが含まれる、
請求項1又は2に記載の自律走行車両。 - 自律走行車両のプロセッサにより実行される情報処理方法であって、
前記自律走行車両は、外部カメラ及び内部カメラを備え、
前記情報処理方法は、
撮像モードが外部撮像モードである場合、前記外部カメラにより前記自律走行車両の外部を撮像することで得られた外部画像データをサーバに送信すること、
前記撮像モードが内部撮像モードである場合、前記内部カメラにより前記自律走行車両の内部を撮像することで得られた内部画像データを前記サーバに送信すること、並びに
前記撮像モードが外内部撮像モードである場合、前記外部画像データ及び前記内部画
像データを前記サーバに送信すること、
を含み、
前記外部撮像モードで前記外部画像データを撮像する時の解像度は、前記内部撮像モードで前記内部画像データを撮像する時の解像度よりも予め低く設定されており、かつ
前記外内部撮像モードで前記内部画像データを撮像する時の解像度は、前記内部撮像モードで前記内部画像データを撮像する時の解像度よりも予め低く設定されている、
情報処理方法。 - 前記プロセッサが、前記外部画像データ及び前記内部画像データを所定の圧縮率で圧縮する、
請求項4に記載の情報処理方法。 - 前記外部画像データ又は前記内部画像データには、複数の画像データが含まれる、
請求項4又は5に記載の情報処理方法。 - 自律走行車両のプロセッサに情報処理方法を実行させるためのプログラムであって、
前記自律走行車両は、外部カメラ及び内部カメラを備え、
前記情報処理方法は、
撮像モードが外部撮像モードである場合、前記外部カメラにより前記自律走行車両の外部を撮像することで得られた外部画像データをサーバに送信すること、
前記撮像モードが内部撮像モードである場合、前記内部カメラにより前記自律走行車両の内部を撮像することで得られた内部画像データを前記サーバに送信すること、並びに
前記撮像モードが外内部撮像モードである場合、前記外部画像データ及び前記内部画像データを前記サーバに送信すること、
を含み、
前記外部撮像モードで前記外部画像データを撮像する時の解像度は、前記内部撮像モードで前記内部画像データを撮像する時の解像度よりも予め低く設定されており、かつ
前記外内部撮像モードで前記内部画像データを撮像する時の解像度は、前記内部撮像モードで前記内部画像データを撮像する時の解像度よりも予め低く設定されている、
プログラム。 - 前記プロセッサに、前記外部画像データ及び前記内部画像データを所定の圧縮率で圧縮させる、
請求項7に記載のプログラム。 - 前記外部画像データ又は前記内部画像データには、複数の画像データが含まれる、
請求項7又は8に記載のプログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021126916A JP7635668B2 (ja) | 2021-08-02 | 2021-08-02 | 自律走行車両、情報処理方法、及びプログラム |
| US17/858,502 US12407842B2 (en) | 2021-08-02 | 2022-07-06 | Autonomous traveling vehicle information processing method, and non-transitory storage medium |
| CN202210913469.9A CN115701617A (zh) | 2021-08-02 | 2022-08-01 | 信息处理装置、信息处理方法以及存储有程序的非临时性的存储介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021126916A JP7635668B2 (ja) | 2021-08-02 | 2021-08-02 | 自律走行車両、情報処理方法、及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023021817A JP2023021817A (ja) | 2023-02-14 |
| JP7635668B2 true JP7635668B2 (ja) | 2025-02-26 |
Family
ID=85037950
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021126916A Active JP7635668B2 (ja) | 2021-08-02 | 2021-08-02 | 自律走行車両、情報処理方法、及びプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12407842B2 (ja) |
| JP (1) | JP7635668B2 (ja) |
| CN (1) | CN115701617A (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230084387A (ko) * | 2021-12-03 | 2023-06-13 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN210573960U (zh) | 2019-09-05 | 2020-05-19 | 成都亿盟恒信科技有限公司 | 一种基于行车记录和安全预警的车载终端 |
| JP2020174295A (ja) | 2019-04-11 | 2020-10-22 | 株式会社デンソー | 車載装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3991314B2 (ja) * | 2002-07-19 | 2007-10-17 | 富士フイルム株式会社 | 画像送信装置 |
| JP2005212709A (ja) * | 2004-02-02 | 2005-08-11 | Yoichi Takebayashi | 車両運転支援システム |
| JP2005222307A (ja) * | 2004-02-05 | 2005-08-18 | Sumitomo Electric Ind Ltd | 画像表示システム及び画像表示方法 |
| JP2009175848A (ja) * | 2008-01-22 | 2009-08-06 | Nec Corp | ドライブレコーダ装置、ドライブレコード方法、プログラム、及び記録媒体 |
| KR20150011889A (ko) * | 2013-07-24 | 2015-02-03 | 주식회사 만도 | 차량용 영상 저장 장치 및 그 영상 저장 방법 |
| JP2018055445A (ja) * | 2016-09-29 | 2018-04-05 | 株式会社デンソー | 車両運行管理システム |
| JP6635075B2 (ja) * | 2017-03-09 | 2020-01-22 | トヨタ自動車株式会社 | 画像記録システム、画像記録方法、画像記録プログラム |
| CN109934952B (zh) * | 2017-12-18 | 2021-05-11 | 华创车电技术中心股份有限公司 | 车载行车影像图像数据建立系统 |
| DE102018214874B3 (de) * | 2018-08-31 | 2019-12-19 | Audi Ag | Verfahren und Anordnung zum Erzeugen einer mit Bildinformationen texturierten Umfeldkarte eines Fahrzeugs und Fahrzeug umfassend eine solche Anordnung |
| JP7249879B2 (ja) | 2018-10-05 | 2023-03-31 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 情報処理方法、及び、情報処理システム |
| CN113039778B (zh) | 2018-10-31 | 2024-01-02 | 索尼集团公司 | 图像捕获装置、图像处理方法和记录介质 |
| CN112956183B (zh) | 2018-10-31 | 2024-03-12 | 索尼集团公司 | 图像拍摄设备、控制方法和记录程序的介质 |
| JP7180535B2 (ja) * | 2019-05-23 | 2022-11-30 | トヨタ自動車株式会社 | 情報処理装置、情報処理方法およびプログラム |
| JP2021022033A (ja) * | 2019-07-25 | 2021-02-18 | トヨタ自動車株式会社 | 車両遠隔指示システム |
| JP2021026687A (ja) | 2019-08-08 | 2021-02-22 | パナソニックi−PROセンシングソリューションズ株式会社 | 不適切行動検知システムおよび不適切行動検知方法 |
| JP7094929B2 (ja) * | 2019-09-20 | 2022-07-04 | 本田技研工業株式会社 | 車両点検装置、及び車両点検システム |
| US12335610B2 (en) * | 2020-11-04 | 2025-06-17 | Sumitomo Electric Industries, Ltd. | Image data transmission apparatus, image data transmission method, and storage medium |
-
2021
- 2021-08-02 JP JP2021126916A patent/JP7635668B2/ja active Active
-
2022
- 2022-07-06 US US17/858,502 patent/US12407842B2/en active Active
- 2022-08-01 CN CN202210913469.9A patent/CN115701617A/zh active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020174295A (ja) | 2019-04-11 | 2020-10-22 | 株式会社デンソー | 車載装置 |
| CN210573960U (zh) | 2019-09-05 | 2020-05-19 | 成都亿盟恒信科技有限公司 | 一种基于行车记录和安全预警的车载终端 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115701617A (zh) | 2023-02-10 |
| US12407842B2 (en) | 2025-09-02 |
| JP2023021817A (ja) | 2023-02-14 |
| US20230031034A1 (en) | 2023-02-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10717448B1 (en) | Automated transfer of vehicle control for autonomous driving | |
| CN110419211B (zh) | 信息处理装置、信息处理方法和计算机可读的存储介质 | |
| WO2018155159A1 (ja) | 遠隔映像出力システム、及び遠隔映像出力装置 | |
| JP2018142921A (ja) | 自動運転制御装置、自動運転制御方法、自動運転制御プログラム、自動運転車両、遠隔制御装置、遠隔制御方法、及び遠隔制御プログラム | |
| JP2020149323A (ja) | 情報処理装置及び情報処理装置を備える自動走行制御システム | |
| KR20210057886A (ko) | 차량 충돌 방지 장치 및 그 방법 | |
| WO2020154959A1 (zh) | 多负载图传方法、控制系统、控制终端、无人机和服务器 | |
| US20240210939A1 (en) | Camera image compression for autonomous driving vehicles | |
| CN113965726A (zh) | 处理交通视频的方法、装置以及系统 | |
| JP7635668B2 (ja) | 自律走行車両、情報処理方法、及びプログラム | |
| US12401765B2 (en) | Predictive adjustment of multi-camera surveillance video data capture using graph maps | |
| JP2019047401A (ja) | 画像処理装置 | |
| US11671700B2 (en) | Operation control device, imaging device, and operation control method | |
| CN108289198A (zh) | 用于监视停放的机动车的方法和装置 | |
| WO2022091167A1 (ja) | 情報提供サーバ、情報提供方法及びプログラム記録媒体 | |
| US11070714B2 (en) | Information processing apparatus and information processing method | |
| US20250166390A1 (en) | Control apparatus, monitoring system, control method, and non-transitory computer-readable medium | |
| CN115214720A (zh) | 应用于自动驾驶的模型确定方法、装置、设备及存储介质 | |
| US12462567B2 (en) | Predictive adjustment of distributed surveillance video data capture using networks of graph maps | |
| WO2021182313A1 (ja) | 情報処理装置、情報処理システム及び情報処理方法 | |
| CN114860359B (zh) | 图像处理方法、系统和存储介质 | |
| US20260112177A1 (en) | Vehicle dashcam with dual front-facing cameras | |
| US20230356754A1 (en) | Control Mode Selection And Transitions | |
| US12455565B2 (en) | Emergency vehicle interactions using external triggers | |
| US20240353850A1 (en) | Control device and remote support system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231026 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240828 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250127 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7635668 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |