JP7635404B2 - 台車および搬送装置 - Google Patents
台車および搬送装置 Download PDFInfo
- Publication number
- JP7635404B2 JP7635404B2 JP2023546671A JP2023546671A JP7635404B2 JP 7635404 B2 JP7635404 B2 JP 7635404B2 JP 2023546671 A JP2023546671 A JP 2023546671A JP 2023546671 A JP2023546671 A JP 2023546671A JP 7635404 B2 JP7635404 B2 JP 7635404B2
- Authority
- JP
- Japan
- Prior art keywords
- transport vehicle
- carriage body
- reference surface
- trolley
- transport
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003860 storage Methods 0.000 claims description 57
- 238000004891 communication Methods 0.000 claims description 56
- 238000001514 detection method Methods 0.000 claims description 35
- 230000007246 mechanism Effects 0.000 claims description 18
- 230000008859 change Effects 0.000 claims description 15
- 230000008878 coupling Effects 0.000 claims description 8
- 238000010168 coupling process Methods 0.000 claims description 8
- 238000005859 coupling reaction Methods 0.000 claims description 8
- 238000013459 approach Methods 0.000 claims description 5
- 230000003287 optical effect Effects 0.000 claims description 5
- 230000001902 propagating effect Effects 0.000 claims description 3
- 238000003825 pressing Methods 0.000 claims description 2
- 230000036544 posture Effects 0.000 description 12
- 230000009471 action Effects 0.000 description 6
- 230000035939 shock Effects 0.000 description 5
- 238000000034 method Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 229920006311 Urethane elastomer Polymers 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G41/00—Supporting frames or bases for conveyors as a whole, e.g. transportable conveyor frames
- B65G41/02—Frames mounted on wheels for movement on rail tracks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/063—Automatically guided
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B3/00—Hand carts having more than one axis carrying transport wheels; Steering devices therefor; Equipment therefor
- B62B3/04—Hand carts having more than one axis carrying transport wheels; Steering devices therefor; Equipment therefor involving means for grappling or securing in place objects to be carried; Loading or unloading equipment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B5/00—Accessories or details specially adapted for hand carts
- B62B5/0006—Bumpers; Safety devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/02—Control or detection
- B65G2203/0266—Control or detection relating to the load carrier(s)
- B65G2203/0283—Position of the load carrier
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/60—Electric or hybrid propulsion means for production processes
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Handcart (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
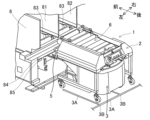
まず、実施形態の台車2を含んで構成される搬送装置1の概要について、図1を参考にして説明する。搬送装置1は、台車2および搬送車3を含んで構成される。図1の右上の矢印に示されるように、搬送装置1、台車2、および搬送車3の前後左右を便宜的に定める。台車2および搬送車3は、前後方向に延びる中心線に対して概ね左右対称に構成される。台車2は、連結部4(詳細後述)によって搬送車3に連結される。搬送車3は、台車2の下側に後方から進入し、連結された台車2を牽引して移動させ、台車2の後方に退出する。
実施形態の台車2は、台車本体20、連結部4、および位置決め部5などで構成される。図2等に示されるように、台車本体20は、荷台21、左右の側面部22、左右の脚部23、2個の前車輪24、および2個の後車輪25などで構成される。また、荷台21には、連結部4の一部、位置決め部5、および可動側通信部(71、72)が配置される(これらについては後で別途説明する)。荷台21は、搬送物Cを載せる部位である。荷台21は、平面視で概ね長方形に形成され、床面から離隔して水平に配置される。荷台21は、その上面に積み降ろし部6を有する。
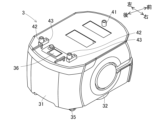
搬送車3は、図3等に示されるように、車両本体31、2個の駆動車輪32、2個の前車輪34、2個の後車輪35、操作パネル36、前述した給電コネクタ37、テープ検出部39、および図略の走行モータなどで構成される。また、搬送車3は、連結部4の残部が配置される(これについては後で別途説明する)。車両本体31は、概ね前後方向に長い直方体形状で、平面視で四隅に丸みをもつ形状に形成されている。車両本体31は、床面からわずかに離隔して水平に配置される。
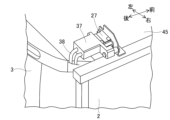
連結部4は、図4に示されるように、荷台21の下部の底板45と搬送車3の上面の間に配置される。連結部4は、台車本体20の下側に進入した状態の搬送車3に対して、台車本体20を牽引可能に連結する。連結部4は、搬送車3の上面に設けられた3個の連結ピン、荷台21の底板45に設けられた前側係止部材46および左右一対の切換機構4Aなどで構成される。なお、図4において、底板45が透視されている。
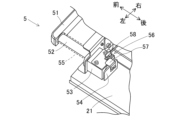
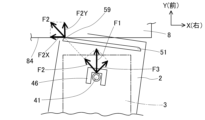
位置決め部5は、図8に示されるように台車本体20の荷台21の前部に設けられる。位置決め部5は、台車本体20を搬送目標に設けられた基準面に正対させる部位である。位置決め部5は、バンパー部51、支持部53、弾性部材55、および検出部56などで構成される。
次に、搬送目標の一例である収容装置8について、図10および図11を参考にして説明する。収容装置8は、概ね直方体形状の装置であり、2個の搬送物Cを収容することができる。収容装置8は、第1収容位置81、第2収容位置82、基準面84、第1固定側通信部85、および第2固定側通信部86を有する。図10および図11において、台車2および搬送車3は、第2収容位置82の後方で基準面84に正対している。なお、「正対する」とは、台車2や搬送車3の中心線が基準面84に正確に直交することを指し示す。
次に、搬送装置1および台車2の動作、作用について、台車2が収容装置8まで移動して停止する場合を例にして説明する。この場合、搬送車3は、連結部4によって連結された台車2を牽引しながら経路表示テープ3Aに沿って走行し、収容装置8の基準面84に正対する方向から接近する。この時点で、台車2の左右方向の位置が定まっており以降は変化しない。
また、搬送車3は、基準面84に接近した後に走行駆動力を一定にして、一定速度でバンパー部51を基準面84に当接させる。このときの一定速度は、搬送車3の通常時の走行速度でもよいし、それよりも低速度であってもよい。バンパー部51が基準面84に当接するとき、台車2は、いつも搬送車3と同じ姿勢(向き)であるとは限らず、換言すると、台車2は、基準面84に正対しているとは限らない。
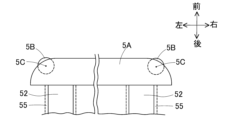
次に、応用例のバンパー部5Aについて、図13を参考にして説明する。応用例のバンパー部5Aは、そのサイズが実施形態のバンパー部51と同程度であり、2個のコロ部材5Bをもつ点が実施形態と相違する。コロ部材5Bは、バンパー部5Aの左前端の位置および右前端の位置にそれぞれ配置される。
変形例の位置決め部では、バンパー部51またはバンパー部5Aを用い、支持ロッド52の後端を直接的に台車本体20に固定する。この変形に伴い、支持部53、当て板54、弾性部材55、および検出部56は省略される。変形例では、弾性部材55が省略されるため、バンパー部51が基準面84に当接するときのショックに起因する台車2の位置ずれおよび姿勢変化の懸念に対して対策を行う。
なお、バンパー部(51、5A)は、実施形態で説明した直線状の棒形状に限定されない。例えば、バンパー部は、左前端および右前端が前方に突出して中央部分が後方にへこんだ曲線形状でもよく、あるいは、左右に分離された分離型であってもよい。また、バンパー部(51、5A)を含む位置決め部5の構成は、搬送車3の後側や前側に連結される台車に適用することが可能である。
Claims (15)
- 搬送物を載せる荷台および走行用の車輪を有する台車本体と、
前記台車本体の下側に進入した状態の搬送車に対して前記台車本体の左右方向の位置を位置決めするとともに、前記搬送車に対する前記台車本体の姿勢変化を許容しつつ、前記搬送車に対して前記台車本体を牽引可能に連結する連結部と、
前記台車本体の前後方向の正面に設けられ、前記台車本体が前記搬送車に牽引されて搬送目標まで移動するときに、前記搬送目標に設けられた基準面に対して左右方向に離隔した少なくとも二点で当接することにより、前後方向の所定位置に前記台車本体を位置決めするとともに、前記基準面に対して前記台車本体を正対させるバンパー部と、
を備える台車。 - 前記台車本体に対して前記バンパー部を前後方向に平行移動可能に支持する支持部と、
前記台車本体に対して前記バンパー部を前方に向けて付勢する弾性部材と、を備える、請求項1に記載の台車。 - 前記バンパー部の左右方向の対称位置に配置される複数組の前記支持部および前記弾性部材を備える、請求項2に記載の台車。
- 前記バンパー部は、前記搬送車が前記台車本体を牽引して前記搬送目標まで移動したときに、前記弾性部材によって所定の押し付け力で前記基準面に押し付けられる、請求項2または3に記載の台車。
- 前記バンパー部が前記基準面に当接したことを検出する検出部を備える、請求項1~4のいずれか一項に記載の台車。
- 搬送物を載せる荷台および走行用の車輪を有する台車本体と、
搬送車に対して前記台車本体を牽引可能に連結する連結部と、
前記台車本体に設けられ、搬送目標に設けられた基準面に当接可能なバンパー部と、
前記バンパー部が前記基準面に当接したことを検出する検出部と、を備え、
前記バンパー部は、自転自在であって前記基準面に当接可能なコロ部材をもつ、
台車。 - 前記連結部は、
前記台車本体の下面および前記搬送車の上面の一方に垂直に設けられた連結ピンと、
前記台車本体の前記下面および前記搬送車の前記上面の他方に設けられ、左右方向および前後方向の少なくとも一方向において、所定の遊び寸法の範囲内で前記連結ピンを相対移動可能に係止する係止部材と、を有して、
前記搬送車に対する前記台車本体の水平方向の姿勢変化を許容する、
請求項1~6のいずれか一項に記載の台車。 - 前記係止部材を係止位置と非係止位置とに切換える切換機構を有し、
前記係止部材が前記係止位置にあるときは、前記台車本体の下側からの前記搬送車の退出を許容せず、前記係止部材が前記非係止位置にあるときは、前記台車本体の下側からの前記搬送車の退出を許容する、請求項7に記載の台車。 - 前記連結部は、前記搬送車に対する前記台車本体の鉛直方向の姿勢変化を許容する、請求項1~8のいずれか一項に記載の台車。
- 搬送物を載せる荷台および走行用の車輪を有する台車本体と、
搬送車に対して前記台車本体を牽引可能に連結する連結部と、
前記台車本体に設けられ、搬送目標に設けられた基準面に当接可能なバンパー部と、
前記バンパー部が前記基準面に当接したことを検出する検出部と、を備え、
前記荷台は、
前記搬送物を正面から前後方向に積み降ろしする積み降ろし部と、
前記搬送車の給電コネクタに嵌合して、前記積み降ろし部を駆動する電力を受け取る受電コネクタと、を有する、
台車。 - 前記台車本体に設けられ、前記搬送目標に設けられた固定側通信部と正対して通信を行う可動側通信部を備える、請求項1~10のいずれか一項に記載の台車。
- 前記搬送目標は、前記搬送物を収容する複数の収容位置、および前記収容位置の各々に対応して設けられた複数の前記固定側通信部を備え、
前記可動側通信部は、いずれかの前記固定側通信部に正対して通信が可能となることにより、前記台車本体が正対する前記収容位置を確認する、
請求項11に記載の台車。 - 前記可動側通信部および前記固定側通信部は、前記基準面に交差する方向に伝搬する光信号を送受信する、請求項11または12に記載の台車。
- 請求項1~13のいずれか一項に記載された台車と、
前記台車本体の下側に進入可能な前記搬送車と、
を備える搬送装置。 - 前記搬送車は、前記台車を牽引して前記搬送目標まで移動させるときに、前記基準面に正対する方向から減速しつつ接近して、通常時の走行速度よりも低速度で前記バンパー部を前記基準面に当接させる、請求項14に記載の搬送装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/033326 WO2023037498A1 (ja) | 2021-09-10 | 2021-09-10 | 台車および搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2023037498A1 JPWO2023037498A1 (ja) | 2023-03-16 |
| JP7635404B2 true JP7635404B2 (ja) | 2025-02-25 |
Family
ID=85506180
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023546671A Active JP7635404B2 (ja) | 2021-09-10 | 2021-09-10 | 台車および搬送装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240375923A1 (ja) |
| JP (1) | JP7635404B2 (ja) |
| CN (1) | CN117751081A (ja) |
| DE (1) | DE112021008220T5 (ja) |
| WO (1) | WO2023037498A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025088664A1 (ja) * | 2023-10-23 | 2025-05-01 | 株式会社Fuji | 搬送装置 |
| WO2025109651A1 (ja) * | 2023-11-20 | 2025-05-30 | ヤマハ発動機株式会社 | 作業装置、作業対象装置、作業システムおよび作業対象装置に対する作業部の位置調整方法 |
| WO2025115165A1 (ja) * | 2023-11-30 | 2025-06-05 | 株式会社Fuji | 自動搬送装置および自動搬送システム |
| WO2025169377A1 (ja) * | 2024-02-08 | 2025-08-14 | 株式会社Fuji | 着脱機構および物品搬送装置 |
| CN119953763B (zh) * | 2025-03-17 | 2025-12-16 | 中车长江运输设备集团有限公司 | 货物传送方法、无人运输车及存储介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017090108A1 (ja) | 2015-11-25 | 2017-06-01 | 株式会社日立製作所 | 棚配置システム、搬送ロボット及び棚配置方法 |
| JP2019091770A (ja) | 2017-11-13 | 2019-06-13 | Juki株式会社 | 部品搬送装置 |
| WO2021144866A1 (ja) | 2020-01-14 | 2021-07-22 | 株式会社Fuji | 物品搬送システム |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4496274A (en) * | 1982-08-11 | 1985-01-29 | Eaton Corporation | Material handling vehicle |
| GB8812634D0 (en) * | 1988-05-27 | 1988-06-29 | Caterpillar Ind Inc | Load positioning assembly & method |
| JP2798307B2 (ja) * | 1990-12-11 | 1998-09-17 | 日本輸送機株式会社 | 無人搬送車の停止位置決め誘導装置 |
| JPH0542913A (ja) * | 1991-07-26 | 1993-02-23 | Ishida Scales Mfg Co Ltd | 包装装置 |
| JPH05265551A (ja) * | 1992-03-23 | 1993-10-15 | Suzuki Motor Corp | 搬送装置 |
| JP2933154B2 (ja) * | 1994-09-21 | 1999-08-09 | 株式会社椿本チエイン | 走行車のバンパー装置 |
| JP2682970B2 (ja) * | 1995-06-30 | 1997-11-26 | 川崎重工業株式会社 | 搬送台車のバンパ装置 |
| US6070679A (en) * | 1996-07-11 | 2000-06-06 | Lindbergh Manufacturing, Inc. | Powered utility cart having engagement adapters |
| JP5132471B2 (ja) * | 2008-08-01 | 2013-01-30 | 矢崎化工株式会社 | 搬送台車と無人搬送車の自動連結装置 |
| US8684373B2 (en) * | 2008-09-23 | 2014-04-01 | Dane Technologies, Inc. | Cart moving machine |
| US8444369B2 (en) * | 2009-10-30 | 2013-05-21 | Amazon Technologies, Inc. | System and method for unloading items |
| US8165718B2 (en) * | 2010-07-30 | 2012-04-24 | Toyota Motor Engineering & Manufacturing North America, Inc. | Robotic transportation devices and systems |
| US11407588B2 (en) * | 2015-06-24 | 2022-08-09 | Hds Mercury, Inc. | Multiple degree of freedom mobile robot loader-unloader system and method |
| JP6888819B2 (ja) * | 2016-07-29 | 2021-06-16 | 日本電産シンポ株式会社 | 無人搬送車、および無人搬送車の制御方法 |
| EP3704037A4 (en) * | 2017-11-03 | 2020-12-09 | Labrador Systems, Inc. | AUTONOMOUS DOMESTIC ROBOTIC SYSTEMS FOR THE COLLECTION AND TRANSPORT OF ITEMS |
| US20230286565A1 (en) * | 2019-06-24 | 2023-09-14 | Daniel Paul Armbrust | Autonomous Utility Cart and Robotic Cart Platform |
| US11592815B2 (en) * | 2019-06-24 | 2023-02-28 | Mul Technologies, Llc | Autonomous utility cart and robotic cart platform |
| CN211844692U (zh) * | 2020-04-09 | 2020-11-03 | 杨雨航 | 一种agv智能物流小车 |
| WO2022198032A1 (en) * | 2021-03-19 | 2022-09-22 | Berkshire Grey Operating Company, Inc. | Systems and methods for processing objects including payload positionable mobile carriers |
| US20240083480A1 (en) * | 2022-06-18 | 2024-03-14 | U-Kart Systems, LLC | Transportation system and methods of using thereof |
| US20250348074A1 (en) * | 2024-05-07 | 2025-11-13 | Oshkosh Corporation | Methods and systems for pathing generation for a vehicle |
| US20250376201A1 (en) * | 2024-06-11 | 2025-12-11 | Toyota Motor Engineering & Manufacturing North America, Inc. | Cargo platforms with extendable gates |
-
2021
- 2021-09-10 JP JP2023546671A patent/JP7635404B2/ja active Active
- 2021-09-10 CN CN202180101112.4A patent/CN117751081A/zh active Pending
- 2021-09-10 US US18/684,506 patent/US20240375923A1/en active Pending
- 2021-09-10 WO PCT/JP2021/033326 patent/WO2023037498A1/ja not_active Ceased
- 2021-09-10 DE DE112021008220.5T patent/DE112021008220T5/de active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017090108A1 (ja) | 2015-11-25 | 2017-06-01 | 株式会社日立製作所 | 棚配置システム、搬送ロボット及び棚配置方法 |
| JP2019091770A (ja) | 2017-11-13 | 2019-06-13 | Juki株式会社 | 部品搬送装置 |
| WO2021144866A1 (ja) | 2020-01-14 | 2021-07-22 | 株式会社Fuji | 物品搬送システム |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112021008220T5 (de) | 2024-07-18 |
| US20240375923A1 (en) | 2024-11-14 |
| JPWO2023037498A1 (ja) | 2023-03-16 |
| WO2023037498A1 (ja) | 2023-03-16 |
| CN117751081A (zh) | 2024-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7635404B2 (ja) | 台車および搬送装置 | |
| US11820596B2 (en) | Automated storage and retrieval system | |
| JP4813409B2 (ja) | トレーラ | |
| US9327903B2 (en) | Suspension system for autonomous transports | |
| KR101395752B1 (ko) | 저장 장치, 보관 랙 및 특히 저장 장치용 하역 기계 | |
| US20220177020A1 (en) | Industrial cart comprising a mother or primary cart and a secondary or daughter cart | |
| KR20070033972A (ko) | 수송기구 자동 적재 시스템 및 방법 | |
| US12187337B2 (en) | Conveyance system and conveyance method | |
| WO2024139910A1 (zh) | 机器人及仓储系统 | |
| CN114955594B (zh) | 装卸车系统 | |
| US20250332874A1 (en) | Mechanically-adaptable hitch guide | |
| JP2026003098A (ja) | ローラ装置 | |
| JP2023014790A (ja) | 牽引治具 | |
| CN218987713U (zh) | 机器人及仓储系统 | |
| US20250313406A1 (en) | Assembly for an automated storage and retrieval system | |
| WO2025141648A1 (ja) | 無人搬送車 | |
| EP3562763B1 (en) | Automated storage and retrieval system | |
| JP7279663B2 (ja) | 台車連結システム | |
| CN211846097U (zh) | 物流机器人 | |
| CN217497386U (zh) | 装卸机器人 | |
| JP6070074B2 (ja) | ストッパ装置及び自動倉庫 | |
| JP5365604B2 (ja) | 物品供給排出装置 | |
| JP7538178B2 (ja) | 荷役搬送車 | |
| US20240092568A1 (en) | Transport Vehicle | |
| WO2026070695A1 (ja) | 自動搬送システム及び移動ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240820 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20241008 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250128 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250212 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7635404 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |