JP7544707B2 - ポンプ - Google Patents
ポンプ Download PDFInfo
- Publication number
- JP7544707B2 JP7544707B2 JP2021533953A JP2021533953A JP7544707B2 JP 7544707 B2 JP7544707 B2 JP 7544707B2 JP 2021533953 A JP2021533953 A JP 2021533953A JP 2021533953 A JP2021533953 A JP 2021533953A JP 7544707 B2 JP7544707 B2 JP 7544707B2
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- bearing
- magnetic
- pump
- driven
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/04—Shafts or bearings, or assemblies thereof
- F04D29/046—Bearings
- F04D29/048—Bearings magnetic; electromagnetic
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D13/00—Pumping installations or systems
- F04D13/02—Units comprising pumps and their driving means
- F04D13/06—Units comprising pumps and their driving means the pump being electrically driven
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D13/00—Pumping installations or systems
- F04D13/02—Units comprising pumps and their driving means
- F04D13/06—Units comprising pumps and their driving means the pump being electrically driven
- F04D13/0606—Canned motor pumps
- F04D13/0633—Details of the bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D13/00—Pumping installations or systems
- F04D13/02—Units comprising pumps and their driving means
- F04D13/06—Units comprising pumps and their driving means the pump being electrically driven
- F04D13/0673—Units comprising pumps and their driving means the pump being electrically driven the motor being of the inside-out type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D15/00—Control, e.g. regulation, of pumps, pumping installations or systems
- F04D15/0088—Testing machines
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D15/00—Control, e.g. regulation, of pumps, pumping installations or systems
- F04D15/02—Stopping of pumps, or operating valves, on occurrence of unwanted conditions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D25/00—Pumping installations or systems
- F04D25/02—Units comprising pumps and their driving means
- F04D25/026—Units comprising pumps and their driving means with a magnetic coupling
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/007—Details, component parts, or accessories especially adapted for liquid pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/18—Rotors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/18—Rotors
- F04D29/22—Rotors specially for centrifugal pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/40—Casings; Connections of working fluid
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0444—Details of devices to control the actuation of the electromagnets
- F16C32/0446—Determination of the actual position of the moving member, e.g. details of sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0459—Details of the magnetic circuit
- F16C32/0461—Details of the magnetic circuit of stationary parts of the magnetic circuit
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0459—Details of the magnetic circuit
- F16C32/0461—Details of the magnetic circuit of stationary parts of the magnetic circuit
- F16C32/0465—Details of the magnetic circuit of stationary parts of the magnetic circuit with permanent magnets provided in the magnetic circuit of the electromagnets
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0459—Details of the magnetic circuit
- F16C32/0468—Details of the magnetic circuit of moving parts of the magnetic circuit, e.g. of the rotor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0474—Active magnetic bearings for rotary movement
- F16C32/048—Active magnetic bearings for rotary movement with active support of two degrees of freedom, e.g. radial magnetic bearings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/276—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM]
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/215—Magnetic effect devices, e.g. Hall-effect or magneto-resistive elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/25—Devices for sensing temperature, or actuated thereby
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
- H02K11/33—Drive circuits, e.g. power electronics
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/16—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields
- H02K5/161—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields radially supporting the rotary shaft at both ends of the rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/08—Structural association with bearings
- H02K7/085—Structural association with bearings radially supporting the rotary shaft at only one end of the rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/08—Structural association with bearings
- H02K7/09—Structural association with bearings with magnetic bearings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/14—Structural association with mechanical loads, e.g. with hand-held machine tools or fans
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K9/00—Arrangements for cooling or ventilating
- H02K9/02—Arrangements for cooling or ventilating by ambient air flowing through the machine
- H02K9/04—Arrangements for cooling or ventilating by ambient air flowing through the machine having means for generating a flow of cooling medium
- H02K9/06—Arrangements for cooling or ventilating by ambient air flowing through the machine having means for generating a flow of cooling medium with fans or impellers driven by the machine shaft
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/024—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2360/00—Engines or pumps
- F16C2360/44—Centrifugal pumps
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Structures Of Non-Positive Displacement Pumps (AREA)
- Magnetic Bearings And Hydrostatic Bearings (AREA)
Description
[ポンプの構成]
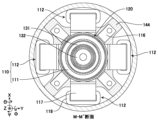
図1は、第1の実施形態に係るポンプ100の全体構成を、一部を省略して概略的に示す縦断面図である。図2は、図1のM-M´線断面図、図3は、ポンプ100の磁気軸受110を概略的に示す拡大縦断面図である。
次に、上記のように構成されたポンプ100の動作を説明する。
このように構成されたポンプ100では、磁気軸受110を構成する軸受ロータ部材111及び軸受ステータ部材112のコア117が磁性材料で構成されているので、磁気回路を形成する。軸受ロータ部材111の永久磁石113は、この磁気回路にバイアス磁束を供給する。
ここで、ポンプに採用される一般的な磁気軸受においては、軸受ステータ部材を構成するコの字型のコアと軸受ロータ部材とで形成される磁気回路を通る磁束Fによって、ロータに対する規定位置への復元力が働く。この復元力は、例えば、軸受ステータ部材のコアのアキシャル方向の長さと、軸受ロータ部材のアキシャル方向の厚みがほぼ等しく、且つ極力薄いほど大きいことが知られている。
[ポンプの他の構成]
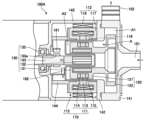
図4は、本発明の第2の実施形態に係るポンプ100Aの全体構成を、一部を省略して概略的に示す縦断面図である。ここで、図4を含む以降の説明においては、第1の実施形態と同一の構成要素については同一の符号を附しているので、以下では重複する説明は省略する。また、駆動機構130の駆動モータ134とコントローラ160は図示を省略している。
[ポンプの更に他の構成]
図5は、本発明の第3の実施形態に係るポンプ100Bの全体構成を、一部を省略して概略的に示す縦断面図である。
図5に示すように、第3の実施形態に係るポンプ100Bは、リアケーシング142の環状空間A2とはZ軸方向に反対側の面に、軸受ロータ部材111を磁気吸引力で引き付ける補助部材としての補助マグネット163を備えた点が、第1の実施形態のポンプ100とは相違している。
[ポンプの更に他の構成]
図6は、本発明の第4の実施形態に係るポンプ100Cの全体構成を、一部を省略して概略的に示す縦断面図である。図7は、ポンプ100Cの磁気軸受110を概略的に示す縦断面図である。
図6に示すように、第4の実施形態に係るポンプ100Cは、磁気軸受110を有する点については第1の実施形態のポンプ100と同様であるが、この磁気軸受110の軸受ロータ部材171の構成が、軸受ロータ部材111の構成とは異なる点が、第1の実施形態のポンプ100とは相違している。
[ポンプの更に他の構成]
図8は、本発明の第5の実施形態に係るポンプ200の全体構成を、一部を省略して概略的に示す縦断面図である。
図8に示すように、第5の実施形態に係るポンプ200は、磁気軸受110の配置態様と駆動機構130の駆動構造が異なる点が、第1の実施形態のポンプ100とは相違している。すなわち、第1の実施形態のポンプ100は、モータ軸133の軸中心からラジアル方向の外側に向けて、駆動マグネット132、従動マグネット131、軸受ロータ部材111及び軸受ステータ部材112が順に配置されていたのに対し、第5の実施形態のポンプ200は、モータ軸133の軸中心から外側に向けてこれらの構成の配置順が真逆となっている。
[ポンプの更に他の構成]
図9は、本発明の第6の実施形態に係るポンプ201の全体構成を、一部を省略して概略的に示す縦断面図である。
図9に示すように、第6の実施形態に係るポンプ201は、第4の実施形態のポンプ100Cの構成に対して、第5の実施形態のポンプ200と同じようにモータ軸133の軸中心からラジアル方向の外側に向けて、磁気軸受110、従動マグネット131及び駆動マグネット132を配置し、インペラ122を環状空間A2の外側から駆動させるようにした点が、第4の実施形態のポンプ100Cとは相違している。このような構成によれば、環状空間A2の内側から駆動させるよりもより大きなトルクでインペラ122を回転させることができ、ポンプ201の運転状況に応じたロータ120の回転制御を精度良く行うことができる。
[ポンプの他の構成]
図10は、本発明の第7の実施形態に係るポンプ100の全体構成を概略的に示す斜視図、図11はポンプ100の回路構成を示すブロック図である。なお、図示及び説明は省略するが、本実施形態の構成は、第1~第6の実施形態に係るポンプ100,100A~100C,200,201にも適用可能であることは言うまでもない。
[ポンプの他の構成]
図12は、本発明の第8の実施形態に係るポンプ203の全体構成を、一部を省略して概略的に示す縦断面図である。なお、このポンプ203は、図10及び図11に示したポンプ100にも適用可能である。
図12に示すように、第8の実施形態に係るポンプ203は、ヨークベース144の後方側に、ポンプ機構を制御するコントローラ210が配置された点、このコントローラ210の後方側の駆動モータ134のモータ軸133に、回転羽根としての冷却ファン169が取り付けられた点、並びにコントローラ210及び冷却ファン169がブラケット143の内部に配置された点が、例えば第1の実施形態に係るポンプ100とは相違している。
この点、本実施形態のポンプ203によれば、モータ軸133に冷却ファン169が取り付けられているため、モータ軸133と一緒に冷却ファン169が回転する。このため、ポンプ203の動作時には常時コントローラ210を冷却し続けることが可能であり、発熱に伴う各基板211~213の熱暴走等の不具合を効果的に防止することができる。特に、最も発熱量が大きいドライバ基板211は、冷却ファン169に最も近い位置に配置されているので、最も冷却効果が高い。また、本実施形態によれば、冷却ファン169を回転させるためのファンモータ等を別途設置する必要がないため、冷却のためのスペースやコストを抑えながらポンプ203を構成する部品点数を最小限に止めることが可能である。
[ポンプのロータの他の構成]
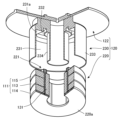
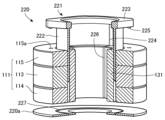
図13は、本発明の第9の実施形態に係るポンプのロータ120の全体構成を、一部を切り欠いて概略的に示す斜視図、図14及び図15はロータ120に含まれる軸受/従動アッシィ220の全体構成を、一部を切り欠いて概略的に示す分解斜視図である。なお、図14(a)は上方からの分解斜視図、また図14(b)は下方からの分解斜視図である。
110 磁気軸受
111 軸受ロータ部材
112 軸受ステータ部材
113 永久磁石
114,115 ヨーク
116 変位センサ
117 コア
118 コイル
120 ロータ
121 軸受/従動部
122 インペラ
130 駆動機構
131 従動マグネット
132 駆動マグネット
133 モータ軸
134 駆動モータ
135 軸受
Claims (9)
- ロータと、
前記ロータを磁気力によって支持する磁気軸受と、
前記ロータを回転駆動する駆動機構と、
前記ロータに取り付けられたインペラを含むポンプ機構と、
前記磁気軸受を制御する制御部と
を備え、
前記磁気軸受は、
前記ロータに設けられた磁性材料からなる軸受ロータ部材と、
前記軸受ロータ部材と対向するように配置された軸受ステータ部材とを備え、
前記軸受ステータ部材は、
磁性材料からなるコアと、
前記コアに巻回されたコイルとを有し、
前記駆動機構は、
前記ロータにおける前記軸受ロータ部材の径方向に隣設された従動部材と、
前記従動部材と前記径方向に対向配置されて前記従動部材と磁気結合されて前記ロータを駆動する駆動部とを備え、
前記制御部は、
前記ロータの変位を検知可能に設けられた第1センサ部からの検知信号に基づき前記ロータの回転位置補正を行い、
前記軸受ステータ部材の前記コアは、その縦断面形状が
前記軸受ロータ部材との対向方向と直交する第1方向に延び前記コイルが巻回される第1部分と、
前記第1部分の前記第1方向の両端部から前記軸受ロータ部材側に延びたのち、前記第1方向に互いに近づく向きに延びる一対の第2部分と、
前記一対の第2部分の各先端部から前記軸受ロータ部材側に向けて延びる一対の第3部分とを有するように形成されている
ことを特徴とするポンプ。 - 前記駆動部は、前記従動部材の前記径方向の内側に配置され、
前記軸受ステータ部材は、前記軸受ロータ部材の前記径方向の外側に複数配置され、前記軸受ロータ部材と前記径方向にそれぞれ対向する
ことを特徴とする請求項1記載のポンプ。 - ロータと、
前記ロータを磁気力によって支持する磁気軸受と、
前記ロータを回転駆動する駆動機構と、
前記ロータに取り付けられたインペラを含むポンプ機構と、
前記磁気軸受を制御する制御部と
を備え、
前記磁気軸受は、
前記ロータに設けられた磁性材料からなる軸受ロータ部材と、
前記軸受ロータ部材と対向するように配置された軸受ステータ部材とを備え、
前記軸受ステータ部材は、
磁性材料からなるコアと、
前記コアに巻回されたコイルとを有し、
前記駆動機構は、
前記ロータにおける前記軸受ロータ部材の径方向に隣設された従動部材と、
前記従動部材と前記径方向に対向配置されて前記従動部材と磁気結合されて前記ロータを駆動する駆動部とを備え、
前記制御部は、
前記ロータの変位を検知可能に設けられた第1センサ部からの検知信号に基づき前記ロータの回転位置補正を行い、
前記駆動部は、前記従動部材の前記径方向の外側に配置され、
前記軸受ステータ部材は、前記軸受ロータ部材の前記径方向の内側に複数配置され、前記軸受ロータ部材と前記径方向にそれぞれ対向する
ことを特徴とするポンプ。 - ロータと、
前記ロータを磁気力によって支持する磁気軸受と、
前記ロータを回転駆動する駆動機構と、
前記ロータに取り付けられたインペラを含むポンプ機構と、
前記磁気軸受を制御する制御部と
を備え、
前記磁気軸受は、
前記ロータに設けられた磁性材料からなる軸受ロータ部材と、
前記軸受ロータ部材と対向するように配置された軸受ステータ部材とを備え、
前記軸受ステータ部材は、
磁性材料からなるコアと、
前記コアに巻回されたコイルとを有し、
前記駆動機構は、
前記ロータにおける前記軸受ロータ部材の径方向に隣設された従動部材と、
前記従動部材と前記径方向に対向配置されて前記従動部材と磁気結合されて前記ロータを駆動する駆動部とを備え、
前記制御部は、
前記ロータの変位を検知可能に設けられた第1センサ部からの検知信号に基づき前記ロータの回転位置補正を行う、
ポンプにおいて、
前記駆動部を回転動作させる駆動モータの回転数を検知する第2センサ部と、
前記ロータの回転数を検知する第3センサ部とを備え、
前記制御部は、
前記第2及び第3センサ部からの検知信号に基づいて、前記駆動モータと前記ロータとの回転同期補正を行う
ことを特徴とするポンプ。 - ロータと、
前記ロータを磁気力によって支持する磁気軸受と、
前記ロータを回転駆動する駆動機構と、
前記ロータに取り付けられたインペラを含むポンプ機構と、
前記磁気軸受を制御する制御部と
を備え、
前記磁気軸受は、
前記ロータに設けられた磁性材料からなる軸受ロータ部材と、
前記軸受ロータ部材と対向するように配置された軸受ステータ部材とを備え、
前記軸受ステータ部材は、
磁性材料からなるコアと、
前記コアに巻回されたコイルとを有し、
前記駆動機構は、
前記ロータにおける前記軸受ロータ部材の径方向に隣設された従動部材と、
前記従動部材と前記径方向に対向配置されて前記従動部材と磁気結合されて前記ロータを駆動する駆動部とを備え、
前記制御部は、
前記ロータの変位を検知可能に設けられた第1センサ部からの検知信号に基づき前記ロータの回転位置補正を行い、
前記ポンプ機構は、
前記ロータを収容する収容空間を形成するケーシングと、
前記ケーシングの前記収容空間とは軸方向に反対側の部分に設けられ、前記ロータを所定の磁気力で引き付ける補助部材とを備える
ことを特徴とするポンプ。 - 前記ロータは、
前記軸受ロータ部材及び前記従動部材を一体的に固定してなる軸受/従動アッシィと、
前記軸受/従動アッシィを内部に回転方向に移動が規制された状態で収容可能な収容部と、を有し、
前記軸受/従動アッシィは、
前記軸受ロータ部材と、前記軸受ロータ部材の径方向の内側又は外側に配置された前記従動部材と、前記軸受ロータ部材及び前記従動部材を、相互に回転方向の移動が規制された状態で結合する回転規制部材と、を有する
ことを特徴とする請求項1~5のいずれか1項記載のポンプ。 - 前記軸受ロータ部材は、
円環状の永久磁石と、
前記永久磁石を前記軸受ロータ部材との対向方向と直交する第1方向に挟み込むように配置された円環状の一対のヨークと、を有し、
前記従動部材は、
N極及びS極が前記ロータの周方向に交互に配置されるように径方向に着磁された複数の永久磁石を有し、
前記回転規制部材は、
前記軸受ロータ部材及び前記従動部材の間に介挿される円筒部と、前記軸受ロータ部材の前記第1方向の端面に当接すると共に、軸方向視の形状が真円形を除く外形を有するフランジ部と、を有し、
前記円筒部の内周面又は外周面には、前記従動部材の前記複数の永久磁石の周方向の境目の縁部に引っ掛かる爪部が形成され、
前記フランジ部の前記軸受ロータ部材の前記端面との当接面には、前記端面に設けられた凹部に嵌合する凸部が形成され、
前記収容部は、前記フランジ部の外形に合う形状に形成された嵌合部を有する
ことを特徴とする請求項6記載のポンプ。 - 前記制御部は、
前記検知信号を含む前記磁気軸受の状態を表す情報に基づいて、前記磁気軸受の異常を判断すると共に、判断結果に基づき前記駆動機構の動作を停止させる
ことを特徴とする請求項1~7のいずれか1項記載のポンプ。 - 前記駆動モータの回転軸に取り付けられて前記回転軸と共に回転する回転羽根と、
前記回転羽根と前記回転軸の軸方向に対向する位置に配置され、前記磁気軸受の前記軸受ステータ部材の前記コイルに励磁電流を供給する基板と、
を更に備えた
ことを特徴とする請求項4記載のポンプ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019133914 | 2019-07-19 | ||
| JP2019133914 | 2019-07-19 | ||
| PCT/JP2020/027209 WO2021015034A1 (ja) | 2019-07-19 | 2020-07-13 | ポンプ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2021015034A1 JPWO2021015034A1 (ja) | 2021-01-28 |
| JP7544707B2 true JP7544707B2 (ja) | 2024-09-03 |
Family
ID=74192948
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021533953A Active JP7544707B2 (ja) | 2019-07-19 | 2020-07-13 | ポンプ |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US12345270B2 (ja) |
| EP (1) | EP4001681B1 (ja) |
| JP (1) | JP7544707B2 (ja) |
| KR (1) | KR102874135B1 (ja) |
| CN (1) | CN114072586B (ja) |
| TW (1) | TWI857101B (ja) |
| WO (1) | WO2021015034A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118758162B (zh) * | 2024-09-03 | 2025-01-28 | 苏州苏磁智能科技有限公司 | 轴径向位移传感器及位移测量电路 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001093967A (ja) | 1999-07-19 | 2001-04-06 | Ebara Corp | 基板回転装置 |
| JP2005121157A (ja) | 2003-10-17 | 2005-05-12 | Rikogaku Shinkokai | 人工心臓用の磁気軸受およびモータ装置 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5156535A (en) * | 1990-10-31 | 1992-10-20 | Itt Corporation | High speed whirlpool pump |
| FR2727174A1 (fr) * | 1994-11-21 | 1996-05-24 | Aerospatiale | Palier magnetique a noyau de bobine rapporte |
| JP3551537B2 (ja) * | 1995-04-26 | 2004-08-11 | 光洋精工株式会社 | フライホイール装置 |
| JP3550465B2 (ja) * | 1996-08-30 | 2004-08-04 | 株式会社日立製作所 | ターボ真空ポンプ及びその運転方法 |
| JP4024382B2 (ja) * | 1998-05-15 | 2007-12-19 | 株式会社東芝 | 磁気軸受装置 |
| JP3986668B2 (ja) * | 1998-06-03 | 2007-10-03 | 矢野 亨 | 竪型ポンプ |
| JP2004162730A (ja) * | 2002-11-08 | 2004-06-10 | Ntn Corp | 磁気浮上回転装置 |
| JP4485379B2 (ja) | 2005-02-17 | 2010-06-23 | 弘之 片岡 | 軸受および血液ポンプ |
| JP4796319B2 (ja) * | 2005-03-29 | 2011-10-19 | 日本電産サンキョー株式会社 | 磁気結合ポンプ装置 |
| JP4786297B2 (ja) | 2005-10-28 | 2011-10-05 | 株式会社イワキ | ハイブリッド型磁気軸受 |
| JP4898319B2 (ja) * | 2006-06-23 | 2012-03-14 | テルモ株式会社 | 血液ポンプ装置 |
| JP4994971B2 (ja) * | 2007-06-29 | 2012-08-08 | アネスト岩田株式会社 | 磁気軸受及び磁気カップリング装置並びにこれらを用いたスクロール型流体機械 |
| US9133847B2 (en) * | 2009-08-28 | 2015-09-15 | Tokyo Institute Of Technology | Disposable magnetically-levitated centrifugal pump |
| JP4969695B1 (ja) * | 2011-09-15 | 2012-07-04 | 三菱重工業株式会社 | 磁気カップリングポンプの駆動装置及び磁気カップリングポンプユニット |
| JP5794576B2 (ja) * | 2012-03-30 | 2015-10-14 | 国立研究開発法人産業技術総合研究所 | 遠心血液ポンプ |
| US9853525B2 (en) * | 2012-06-12 | 2017-12-26 | Abb Research Ltd. | Magnetic bearing assembly and arrangement of position sensors for a magnetic bearing assembly |
| JP6090926B2 (ja) * | 2013-05-30 | 2017-03-08 | 三菱重工業株式会社 | ターボ圧縮機およびそれを用いたターボ冷凍機 |
| CN203412773U (zh) * | 2013-08-20 | 2014-01-29 | 李�瑞 | 磁力泵 |
| WO2015137126A1 (ja) * | 2014-03-11 | 2015-09-17 | 国立大学法人東京工業大学 | 磁気浮上式ポンプ装置、磁気浮上式ポンプ装置による流体の粘度推定方法、及び磁気浮上式ポンプ装置による流体の流量推定方法 |
| JP2018162865A (ja) * | 2017-03-27 | 2018-10-18 | Ntn株式会社 | 低温流体用ポンプおよび低温流体移送装置 |
| EP3940235B1 (en) | 2019-03-14 | 2023-05-24 | Iwaki Co., Ltd. | Magnetic bearing, drive device equipped with same, and pump |
-
2020
- 2020-07-13 JP JP2021533953A patent/JP7544707B2/ja active Active
- 2020-07-13 US US17/625,140 patent/US12345270B2/en active Active
- 2020-07-13 EP EP20843534.7A patent/EP4001681B1/en active Active
- 2020-07-13 KR KR1020217038211A patent/KR102874135B1/ko active Active
- 2020-07-13 CN CN202080047808.9A patent/CN114072586B/zh active Active
- 2020-07-13 WO PCT/JP2020/027209 patent/WO2021015034A1/ja not_active Ceased
- 2020-07-15 TW TW109123902A patent/TWI857101B/zh active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001093967A (ja) | 1999-07-19 | 2001-04-06 | Ebara Corp | 基板回転装置 |
| JP2005121157A (ja) | 2003-10-17 | 2005-05-12 | Rikogaku Shinkokai | 人工心臓用の磁気軸受およびモータ装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021015034A1 (ja) | 2021-01-28 |
| EP4001681B1 (en) | 2024-01-17 |
| CN114072586A (zh) | 2022-02-18 |
| KR20220035033A (ko) | 2022-03-21 |
| CN114072586B (zh) | 2023-11-03 |
| KR102874135B1 (ko) | 2025-10-20 |
| US12345270B2 (en) | 2025-07-01 |
| TWI857101B (zh) | 2024-10-01 |
| TW202104755A (zh) | 2021-02-01 |
| US20220268287A1 (en) | 2022-08-25 |
| WO2021015034A1 (ja) | 2021-01-28 |
| EP4001681A4 (en) | 2022-09-07 |
| EP4001681A1 (en) | 2022-05-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8596999B2 (en) | Disposable centrifugal blood pump with magnetic coupling | |
| CN110495074B (zh) | 转子 | |
| JP7469291B2 (ja) | 磁気軸受、これを備えた駆動装置及びポンプ | |
| US10995765B2 (en) | Magnetic levitated pump | |
| US10473157B2 (en) | Spinning rotor shaft, bearing arrangement for the active magnetic support of such a spinning rotor shaft and spinning rotor drive device | |
| JP6154871B2 (ja) | 磁気浮上ローター機構 | |
| JP7700119B2 (ja) | 回転駆動装置及びポンプ | |
| JP7544707B2 (ja) | ポンプ | |
| EP1857695B1 (en) | Ball bearing | |
| EP3626970B1 (en) | Vacuum pump with magnetic bearing device comprising annularly-arranged electromagnets | |
| WO2009113434A1 (ja) | ポンプ | |
| JPH10336998A (ja) | 磁気継手 | |
| CN217935378U (zh) | 传感器磁铁保持结构以及无刷马达 | |
| CN119853502B (zh) | 一种磁悬浮电机及泵 | |
| JP7182729B2 (ja) | インペラ及びこれを備えたポンプ | |
| JPH07305697A (ja) | 軸流流体電気機械 | |
| JP2006217751A (ja) | 電動機 | |
| JP2017214971A (ja) | 電磁クラッチ | |
| JPH08121479A (ja) | 磁気軸受 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230605 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240520 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240813 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240822 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7544707 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |