JP7457706B2 - ベアリングのための検出装置 - Google Patents
ベアリングのための検出装置 Download PDFInfo
- Publication number
- JP7457706B2 JP7457706B2 JP2021528928A JP2021528928A JP7457706B2 JP 7457706 B2 JP7457706 B2 JP 7457706B2 JP 2021528928 A JP2021528928 A JP 2021528928A JP 2021528928 A JP2021528928 A JP 2021528928A JP 7457706 B2 JP7457706 B2 JP 7457706B2
- Authority
- JP
- Japan
- Prior art keywords
- bearing
- electrode
- electrodes
- detection device
- piezoelectric transducer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 89
- 238000007667 floating Methods 0.000 claims description 45
- 239000000463 material Substances 0.000 claims description 42
- 238000000034 method Methods 0.000 claims description 20
- 230000033001 locomotion Effects 0.000 claims description 15
- 230000008878 coupling Effects 0.000 claims description 11
- 238000010168 coupling process Methods 0.000 claims description 11
- 238000005859 coupling reaction Methods 0.000 claims description 11
- 238000005096 rolling process Methods 0.000 claims description 6
- 239000004020 conductor Substances 0.000 claims description 4
- 239000010410 layer Substances 0.000 description 92
- 230000010287 polarization Effects 0.000 description 48
- 238000000151 deposition Methods 0.000 description 16
- 238000004519 manufacturing process Methods 0.000 description 16
- 229910052760 oxygen Inorganic materials 0.000 description 13
- 239000001301 oxygen Substances 0.000 description 13
- 230000008021 deposition Effects 0.000 description 12
- 238000000605 extraction Methods 0.000 description 11
- 239000013598 vector Substances 0.000 description 11
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 10
- 238000007650 screen-printing Methods 0.000 description 8
- 230000005284 excitation Effects 0.000 description 7
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 7
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 7
- 230000000670 limiting effect Effects 0.000 description 7
- 239000010936 titanium Substances 0.000 description 7
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 6
- 239000000919 ceramic Substances 0.000 description 6
- 238000004049 embossing Methods 0.000 description 6
- 229910052719 titanium Inorganic materials 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 239000000203 mixture Substances 0.000 description 5
- 229910052726 zirconium Inorganic materials 0.000 description 5
- QCWXUUIWCKQGHC-UHFFFAOYSA-N Zirconium Chemical compound [Zr] QCWXUUIWCKQGHC-UHFFFAOYSA-N 0.000 description 4
- 230000009471 action Effects 0.000 description 4
- 125000004429 atom Chemical group 0.000 description 4
- 230000008901 benefit Effects 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 4
- 230000005684 electric field Effects 0.000 description 4
- 239000012777 electrically insulating material Substances 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 229910052751 metal Inorganic materials 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 230000036961 partial effect Effects 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 239000000758 substrate Substances 0.000 description 4
- 238000005452 bending Methods 0.000 description 3
- 229910010293 ceramic material Inorganic materials 0.000 description 3
- 238000009826 distribution Methods 0.000 description 3
- 239000010408 film Substances 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 238000005304 joining Methods 0.000 description 3
- 239000007769 metal material Substances 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- -1 oxygen ions Chemical class 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 238000004544 sputter deposition Methods 0.000 description 3
- 230000005355 Hall effect Effects 0.000 description 2
- MCMNRKCIXSYSNV-UHFFFAOYSA-N Zirconium dioxide Chemical compound O=[Zr]=O MCMNRKCIXSYSNV-UHFFFAOYSA-N 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 2
- 238000004026 adhesive bonding Methods 0.000 description 2
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 2
- 238000005229 chemical vapour deposition Methods 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 239000013078 crystal Substances 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 230000001939 inductive effect Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000013508 migration Methods 0.000 description 2
- 230000005012 migration Effects 0.000 description 2
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 2
- 229920000642 polymer Polymers 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 238000005245 sintering Methods 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 238000002207 thermal evaporation Methods 0.000 description 2
- 229910052721 tungsten Inorganic materials 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 229910020696 PbZrxTi1−xO3 Inorganic materials 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 229910052770 Uranium Inorganic materials 0.000 description 1
- IHWJXGQYRBHUIF-UHFFFAOYSA-N [Ag].[Pt] Chemical compound [Ag].[Pt] IHWJXGQYRBHUIF-UHFFFAOYSA-N 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 239000012790 adhesive layer Substances 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 230000003466 anti-cipated effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000005056 compaction Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 229920001577 copolymer Polymers 0.000 description 1
- RKTYLMNFRDHKIL-UHFFFAOYSA-N copper;5,10,15,20-tetraphenylporphyrin-22,24-diide Chemical group [Cu+2].C1=CC(C(=C2C=CC([N-]2)=C(C=2C=CC=CC=2)C=2C=CC(N=2)=C(C=2C=CC=CC=2)C2=CC=C3[N-]2)C=2C=CC=CC=2)=NC1=C3C1=CC=CC=C1 RKTYLMNFRDHKIL-UHFFFAOYSA-N 0.000 description 1
- 238000002425 crystallisation Methods 0.000 description 1
- 230000008025 crystallization Effects 0.000 description 1
- 125000004122 cyclic group Chemical group 0.000 description 1
- 238000005137 deposition process Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 239000003989 dielectric material Substances 0.000 description 1
- 239000002019 doping agent Substances 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 229920001519 homopolymer Polymers 0.000 description 1
- 239000000976 ink Substances 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000011089 mechanical engineering Methods 0.000 description 1
- 229910001092 metal group alloy Inorganic materials 0.000 description 1
- 229910052758 niobium Inorganic materials 0.000 description 1
- 239000010955 niobium Substances 0.000 description 1
- GUCVJGMIXFAOAE-UHFFFAOYSA-N niobium atom Chemical compound [Nb] GUCVJGMIXFAOAE-UHFFFAOYSA-N 0.000 description 1
- 229910000510 noble metal Inorganic materials 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 125000002524 organometallic group Chemical group 0.000 description 1
- 125000004430 oxygen atom Chemical group O* 0.000 description 1
- SWELZOZIOHGSPA-UHFFFAOYSA-N palladium silver Chemical compound [Pd].[Ag] SWELZOZIOHGSPA-UHFFFAOYSA-N 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 229910052697 platinum Inorganic materials 0.000 description 1
- 229920006254 polymer film Polymers 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000452 restraining effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000010183 spectrum analysis Methods 0.000 description 1
- 238000004528 spin coating Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 229910052720 vanadium Inorganic materials 0.000 description 1
Images

















































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/101—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C41/00—Other accessories, e.g. devices integrated in the bearing not relating to the bearing function as such
- F16C41/007—Encoders, e.g. parts with a plurality of alternating magnetic poles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/52—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions
- F16C19/527—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions related to vibration and noise
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C43/00—Assembling bearings
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/18—Measuring force or stress, in general using properties of piezo-resistive materials, i.e. materials of which the ohmic resistance varies according to changes in magnitude or direction of force applied to the material
- G01L1/183—Measuring force or stress, in general using properties of piezo-resistive materials, i.e. materials of which the ohmic resistance varies according to changes in magnitude or direction of force applied to the material by measuring variations of frequency of vibrating piezo-resistive material
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/108—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving resistance strain gauges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0009—Force sensors associated with a bearing
- G01L5/0019—Force sensors associated with a bearing by using strain gages, piezoelectric, piezo-resistive or other ohmic-resistance based sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M13/00—Testing of machine parts
- G01M13/04—Bearings
- G01M13/045—Acoustic or vibration analysis
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2202/00—Solid materials defined by their properties
- F16C2202/30—Electric properties; Magnetic properties
- F16C2202/36—Piezoelectric
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2233/00—Monitoring condition, e.g. temperature, load, vibration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2326/00—Articles relating to transporting
- F16C2326/01—Parts of vehicles in general
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Electromagnetism (AREA)
- Analytical Chemistry (AREA)
- Acoustics & Sound (AREA)
- Measurement Of Mechanical Vibrations Or Ultrasonic Waves (AREA)
- Geophysics And Detection Of Objects (AREA)
- Spinning Or Twisting Of Yarns (AREA)
- Rolling Contact Bearings (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Description
第2及び第4の電極(E2,E4)の部分または指部(F2,F4)は、互いから実質的に第1の距離(D1)を置いて少なくとも縦方向(L)に延在し、それぞれ、第2の電極(E2)の部分または指部(F2)、第4の電極(E4)の部分または指部(F4)は、実質的に第1の距離(D1)の2倍以上、好ましくは実質的に第1の距離(D1)の2倍離れた距離(D2)を置き、及び好ましくは、
第1の電極(E1)のそれぞれの部分または指部(F1)は、第3の電極(E2)のそれぞれ当該部分または指部(F2)と実質的に重ねられるまたは揃えられる位置にあり、第3の電極(E3)のそれぞれの部分または指部(F3)は、第4の電極(E4)のそれぞれの当該部分または指部(F4)と実質的に重ねられるまたは揃えられる位置にある、圧電トランスデューサ。
第2及び第4の電極(F2,F4)の部分または指部(F2,F4)は、互いから実質的に第1の距離(D1,D3)を置いて縦方向(L)に延在し、それぞれ第2の電極(E2)の部分または指部(F2)、第4の電極(E4)の部分または指部(F4)は、実質的に第2の距離(D2)を置く、圧電トランスデューサ。
-第1及び第3の電極(E1,E3)の1つのそれぞれ当該部分または指部(F1)は、第2及び第4の電極(E2,E4)の1つのそれぞれ当該部分または指部(F2)と実質的に重ねられるまたは揃えられる位置にあり、第1及び第3の電極(E1,E3)の他の1つのそれぞれ当該部分または指部(F3)は、第2及び第4の電極(E2,E4)の他の1つのそれぞれ当該部分または指部(F4)に対して実質的に交互に配置された位置にある、3に記載の圧電トランスデューサ。
-第1及び第3の電極(E1,E3)の1つのそれぞれ当該部分または指部(F1)は、第2及び第4の電極(E2,E4)の1つのそれぞれ当該部分または指部(F2)と実質的に重ねられるまたは揃えられる位置にあり、第1及び第3の電極(E1,E3)の他の1つのそれぞれ当該部分または指部(F3)は、第2及び第4の電極(E2,E4)の他の1つのそれぞれ当該部分または指部(F4)に対して実質的に交互に配置された位置にあり、第1及び第3の電極(E1,E3)またはそれぞれ当該部分または指部(F1,F3)は、互いに電気的に絶縁であり、第3及び第4の電極(E3,E4)またはそれぞれ当該部分または指部(F3,F4)は、互いに及び第1及び第3の電極(E1,E3)に対して電気的に絶縁であり、縦方向(L)を横切る方向(W)に圧電材料の層(11)に誘導されたせん断応力(SS)は、一側面の第1及び第3の電極(E1,E3)の1つと、他側面の第2及び第4の電極(E2,E4)の1つの間に当該せん断応力(SS)に比例する値を有する電位差を発生し、第1及び第3の電極(E1,E3)の1つ及び第2及び第4の電極(E2,E4)の1つは、好ましくは当該部分または指部が実質的に互いに重なり合っているまたは互いに揃えられる位置にある電極である、4に記載の圧電トランスデューサ。
ii)一側面の第1の電極(E1)と少なくとも1つの第3の電極(E3,E5)の少なくとも1つ、またはそれぞれの当該部分または指部、他の側面の第2の電極(E2)と少なくとも1つの第4の電極(E4,E6)の少なくとも1つ、またはそれぞれ当該部分または指部の間に電位差を加えることによって圧電材料の層(11)の分極を得るステップと、を備え、
ステップii)は、圧電トランスデューサ(10)がその後せん断の力を検出するために用いられる電極またはそれぞれ当該部分または指部の電気接続の第2の形態と異なる、電極またはそれぞれ当該部分または指部の電気接続の第1の形態で実行される、圧電トランスデューサを製造する方法。
Claims (15)
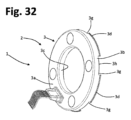
- -ベアリング(6)の固定リング(6a)に固定されるように構成されたハウジング体(2)と、
-前記ハウジング体(2)に設けられた検出装置であって、少なくとも1つの圧電トランスデューサ(10;20)を含むセンサ手段(10;20;30)を備える、検出配置と、を備え、
前記検出配置は、
-前記ハウジング体(2)に取り付けられ、前記ベアリング(6)の振動を機械的に伝達することに適した少なくとも1つの浮体(7)と、
-前記ハウジング体(2)の固定位置に取り付けられる少なくとも1つのセンサユニット(8)であって、前記少なくとも1つの浮体(7)の対応する表面を、直接または少なくとも1つの別の要素の介して受け入れるように構成された少なくとも1つの検出面(8a)を有する、少なくとも1つのセンサユニット(8)と、を備え、
前記少なくとも1つの圧電トランスデューサ(10;20)は、前記少なくとも1つの検出面(8a)の少なくとも一部を画定し、前記少なくとも1つの圧電トランスデューサ(10;20)の前記少なくとも1つの浮体(7)によって加えられる力の大きさに比例する電位差を発生するように構成される、ベアリング検出装置。 - 前記ベアリング(6)の回転軸(X)に平行な方向に、前記少なくとも1つのセンサユニット(8)に向かう方向に又は逆の方向に前記少なくとも1つの浮体(7)を押すように構成された少なくとも1つの弾性要素(3e;3e’)を備えた、請求項1に記載のベアリング検出装置。
- 前記少なくとも1つの圧電トランスデューサ(10;20)は、
縦方向(L)と横方向(W)に延在する圧電材料の層(11;21)と、
第1の電極(E1;E21)及び第2の電極(E2;E22)を備え、
前記第1の電極(E1;E21)と前記第2の電極(E2;E22)との間に前記圧電材料の層(11;21)が少なくとも部部的に延在する、請求項1または2に記載のベアリング検出装置。 - 前記少なくとも1つの圧電トランスデューサ(10;20)は、前記少なくとも1つの浮体(7)に加えられる第1のせん断応力(SS)を示す第1の電位差を発生するように構成された第1の圧電トランスデューサ(10)と、前記少なくとも1つの浮体(7)に加えられる第2のせん断応力(SS)を示す第2の電位差を発生するように構成された少なくとも1つの第2の圧電トランスデューサ(20)を備え、
前記第1の圧電トランスデューサ(10)と前記少なくとも1つの第2の圧電トランスデューサ(20)は、前記第1の圧電トランスデューサ(10)が第1の方向のせん断応力を検出するように設計され、前記少なくとも1つの第2の圧電トランスデューサ(10)は、第2の方向のせん断応力を検出するように構成され、
前記第1の方向と前記第2の方向は、一方が他方を横断する、または、一方が他方に対して傾いている、請求項1乃至3のいずれか1項に記載のベアリング検出装置。 - 前記少なくとも1つの圧電トランスデューサ(10;20)は、前記少なくとも1つの浮体(7)に加えられるせん断応力(SS)に比例する電位差を発生するように構成された第1の圧電トランスデューサ(10)と、前記少なくとも1つの浮体(7)に加えられる垂直応力に比例する電位差を発生するように構成された少なくとも一つの第2の圧電トランスデューサ(20)の少なくとも1つを備える、請求項1乃至4のいずれか1項に記載のベアリング検出装置。
- 前記少なくとも1つの圧電トランスデューサ(10)の前記第1の電極(E1)と前記第2の電極(E2)のそれぞれは、前記圧電材料の層(11)の第1の主面(11a)と第2の主面(11a,11b)に延在する複数の部分または指部(F1,F2)を有し、
前記少なくとも1つの圧電トランスデューサ(10)は、少なくとも1つの第3の電極(E3)と少なくとも1つの第4の電極(E4)とを有し、
前記少なくとも1つの第3の電極(E3)と前記少なくとも1つの第4の電極(E4)はそれぞれが、前記圧電材料の層(11)の前記第1の主面(11a)と前記第2の主面(11b)に延在する、請求項3に記載のベアリング検出装置。 - -前記少なくとも1つの圧電トランスデューサ(10)は、前記第1の電極(E1)、前記第2の電極(E2)、前記第3の電極(E3)、前記第4の電極(E4)を備え、
-前記第3の電極(E3)は、前記第1の電極(E1)の部分または指部(F1)と互いにかみ合うまたは互い違いにある形態であるそれぞれの部分または指部(F3)を有し、
前記第4の電極(E4)は、前記第2の電極(E2)の部分または指部(F2)とかみ合うまたは互い違いにある形態であるそれぞれの部分または指部(F4)を有する、請求項6に記載のベアリング検出装置。 - 前記少なくとも1つの圧電トランスデューサ(10;20)は、圧電材料が堆積された層(11;21)と前記圧電材料が堆積された層(11;21)の2つの対向する主面(11a,11b;21a,21b)において電気導電材料(E1-E4;E22,E23)が堆積された電極を備える、請求項1乃至7のいずれか1項に記載のベアリング検出装置。
- 前記少なくとも1つの浮体(7)から前記少なくとも1つのセンサユニット(8)に機械的応力を伝達できる少なくとも1つの中間要素または層が、前記少なくとも1つの浮体(7)の前記検出面(8a)と前記対応する面の間に設置される、請求項1乃至8のいずれか1項に記載のベアリング検出装置。
- 前記ハウジング体(2)は、
-実質的に環状である、少なくとも1つの第1の本体部品(3)と少なくとも1つの第2の本体部品(4)を備える、及び/又は
前記ベアリング(6)の固定リング(6a)と結合するように構成された、円周の少なくとも一部に沿って延在する結合構造を有する、請求項3に記載のベアリング検出装置。 - 前記センサ手段は、さらに前記ベアリング(6)の回転リング(6b)または前記ベアリング(6)の前記回転リング(6b)に関連し、それと共に回転する要素(31)の角移動または回転移動を検出するように構成された前記ハウジング体(2)のセンサ要素(30)を備える、請求項1乃至10のいずれか1項に記載のベアリング検出装置。
- 前記ハウジング体(2)は、前記ハウジング体(2)を前記ベアリング(6)から分離の目的のために、前記ハウジング体(2)の握りを促進するように、1またはそれ以上の表面要素(3m;3n;3o)を形成している、請求項1乃至11のいずれか1項に記載のベアリング検出装置。
- 固定リング(6a)、回転リング(6b)、前記固定リング(6a)と前記回転リング(6b)の間の転がり要素(6c)を備え、
前記固定リング(6a)に請求項1乃至12のいずれか1項に記載のベアリング検出装置が固定される、センサ付きベアリング。 - ベアリングの振動を検出する方法であって、
i)請求項1乃至12のいずれか1項に記載のベアリング検出装置(1)を提供するステップと、
ii)前記ベアリング(6)の固定リング(6a)に対して前記検出装置(1)を固定するステップと、
iii)少なくとも1つの圧電トランスデューサ(10;20)によって、前記少なくとも1つの浮体(7)に加えられたせん断応力(SS)と垂直応力の少なくとも1つに比例する電位差を生成するステップと、を備える方法。 - ベアリング(6)の固定リング(6a)に固定されるように構成されたハウジング体(2)と、
少なくとも1つの浮体(7)とセンサ手段(10;20;30)を備える、前記ハウジング体(2)に関連付けられる検出配置と、を備え、
前記少なくとも1つの浮体(7)は、前記ハウジング体(2)内に取り付けられ、前記ベアリング(6)によって発生する機械的振動を伝達することができ、
前記センサ手段(10;20;30)は、
-少なくとも1つの検出面が前記少なくとも1つの浮体(7)によって圧力を加えられるとき電位差を発生することができる圧電トランスデューサ(10;20)と、
-前記ベアリング(6)の回転リング(6b)または前記ベアリング(6)の前記回転リング(6b)と共に動くことができる要素(31)の動作または位置を検出するように構成された、角移動または回転移動(30)を感知するためのセンサ要素、の一方又は両方を含む、ベアリング検出装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT102018000010522 | 2018-11-22 | ||
| IT102018000010522A IT201800010522A1 (it) | 2018-11-22 | 2018-11-22 | Dispositivo di rilevazione per cuscinetti |
| PCT/IB2019/060071 WO2020105008A1 (en) | 2018-11-22 | 2019-11-22 | Detection device for bearings |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022507901A JP2022507901A (ja) | 2022-01-18 |
| JPWO2020105008A5 JPWO2020105008A5 (ja) | 2022-11-18 |
| JP7457706B2 true JP7457706B2 (ja) | 2024-03-28 |
Family
ID=65576482
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021528928A Active JP7457706B2 (ja) | 2018-11-22 | 2019-11-22 | ベアリングのための検出装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11982584B2 (ja) |
| EP (1) | EP3884177B1 (ja) |
| JP (1) | JP7457706B2 (ja) |
| CN (1) | CN113396292B (ja) |
| IT (1) | IT201800010522A1 (ja) |
| WO (1) | WO2020105008A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112229634B (zh) * | 2020-11-14 | 2021-10-29 | 罗斯(无锡)设备有限公司 | 一种搅拌设备轴承状态在线监控方法 |
| CN113898667A (zh) * | 2021-10-27 | 2022-01-07 | 北京石墨烯技术研究院有限公司 | 轴承结构 |
| CN114678732B (zh) * | 2022-03-10 | 2023-12-01 | 贵州乌江水电开发有限责任公司 | 一种智能弹性金属塑料推力瓦在线监测系统 |
| WO2024036412A1 (en) * | 2022-08-19 | 2024-02-22 | University Of Manitoba | Transducer for use with a rotary bearing |
| CN115343047A (zh) * | 2022-09-14 | 2022-11-15 | 苏州铁近机电科技股份有限公司 | 轴承音检装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001074767A (ja) | 1999-09-03 | 2001-03-23 | Matsushita Electric Ind Co Ltd | 加速度センサおよびその製造方法 |
| JP2004169756A (ja) | 2002-11-18 | 2004-06-17 | Nsk Ltd | センサ付軸受装置 |
| JP2007333169A (ja) | 2006-06-19 | 2007-12-27 | Nsk Ltd | センサ付軸受装置 |
| US20090266169A1 (en) | 2006-11-07 | 2009-10-29 | Universite De Reims Champagne Ardenne | Device and method for monitoring the vibratory condition of a rotating machine |
| JP2011191091A (ja) | 2010-03-12 | 2011-09-29 | Seiko Epson Corp | 音叉型振動片、振動子およびセンサー装置 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3908175C2 (de) * | 1988-03-14 | 1994-04-14 | Elco Co | Belastungs-Detektorvorrichtung |
| JP2794683B2 (ja) | 1991-04-16 | 1998-09-10 | 日産自動車株式会社 | 歯車支持軸受構造 |
| DE19522543A1 (de) * | 1994-08-01 | 1996-02-08 | Ntn Toyo Bearing Co Ltd | Piezoelektrisches Film-Meßfühlersystem für Lager |
| JPH112239A (ja) * | 1997-06-13 | 1999-01-06 | Nippon Seiko Kk | 転がり軸受の各種状態値を測定する装置 |
| FR2777327B1 (fr) * | 1998-04-10 | 2000-05-19 | Roulements Soc Nouvelle | Dispositif de fixation d'un capteur d'informations pour roulement ou palier |
| DE10136438A1 (de) * | 2000-08-22 | 2002-03-07 | Bosch Gmbh Robert | Sensoranordnung in einem Wälzlager und Verfahren zur Auswertung des Sensorsignals |
| JP4614524B2 (ja) * | 2000-11-06 | 2011-01-19 | 株式会社鶴見製作所 | 水中回転機械の電食防止装置 |
| NL1017977C2 (nl) * | 2001-05-01 | 2002-11-05 | Skf Ab | Sensorsamenstel en sensorsysteem voor gecombineerde belastingsbepaling van een lager en toestandsbewaking van een lager. |
| JP2002357220A (ja) * | 2001-06-01 | 2002-12-13 | Nsk Ltd | 回転検出装置付転がり軸受ユニット |
| EP1695056B1 (fr) * | 2003-12-15 | 2011-11-02 | Aktiebolaget SKF | Dispositif de mesure de charge sur un palier, palier à roulement à dispositif de mesure de charge et machine à tambour rotatif |
| DE102004024851A1 (de) * | 2004-05-19 | 2005-12-22 | Fag Kugelfischer Ag & Co. Ohg | Lageranordnung zur Lagerung wenigstens eines Maschinenteiles |
| JP4811778B2 (ja) * | 2005-03-16 | 2011-11-09 | 株式会社ジェイテクト | 荷重センサ内蔵型軸受及びそれを用いたハブユニット |
| JP5231070B2 (ja) * | 2008-04-02 | 2013-07-10 | 株式会社ディスコ | 気体軸受けの接触検知機構 |
| EP2327895A1 (de) * | 2009-11-27 | 2011-06-01 | Siemens Aktiengesellschaft | Lagerungseinrichtung mit Sensor zur Messung der Lageraufstandskraft einer rotierenden Welle |
| DE102011054967B4 (de) * | 2011-10-31 | 2013-07-04 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Sensoreinrichtung zur Überwachung eines Wälzlagers |
| EP2841903A1 (en) * | 2012-04-24 | 2015-03-04 | Aktiebolaget SKF | Bearing monitoring method and system |
| CN105659478B (zh) * | 2013-10-21 | 2019-03-29 | 松下知识产权经营株式会社 | 电动机以及具备该电动机的电设备 |
| CN103982543B (zh) * | 2014-05-28 | 2017-07-25 | 浙江师范大学 | 风力发电机用自感知圆锥滚子轴承 |
| GB2533090A (en) * | 2014-12-08 | 2016-06-15 | Skf Ab | Sensor device with mounting means |
| GB2542565A (en) * | 2015-09-22 | 2017-03-29 | Skf Ab | Bearing with vibration sensor and load detection |
| HRPK20160924B3 (hr) * | 2016-07-22 | 2019-06-28 | Sveučilište U Zagrebu Fakultet Elektrotehnike I Računarstva | Uređaj za mjerenje temperature ili drugih fizikalnih veličina na rotacijskom sklopu gdje se prijenos signala i energije između rotacijskog sklopa i stacionarnog dijela ostvaruje beskontaktnim prijenosom |
| JP2018087595A (ja) * | 2016-11-29 | 2018-06-07 | 株式会社ジェイテクト | 転がり軸受装置及び給油ユニット |
-
2018
- 2018-11-22 IT IT102018000010522A patent/IT201800010522A1/it unknown
-
2019
- 2019-11-22 EP EP19817413.8A patent/EP3884177B1/en active Active
- 2019-11-22 WO PCT/IB2019/060071 patent/WO2020105008A1/en unknown
- 2019-11-22 US US17/295,909 patent/US11982584B2/en active Active
- 2019-11-22 JP JP2021528928A patent/JP7457706B2/ja active Active
- 2019-11-22 CN CN201980090019.0A patent/CN113396292B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001074767A (ja) | 1999-09-03 | 2001-03-23 | Matsushita Electric Ind Co Ltd | 加速度センサおよびその製造方法 |
| JP2004169756A (ja) | 2002-11-18 | 2004-06-17 | Nsk Ltd | センサ付軸受装置 |
| JP2007333169A (ja) | 2006-06-19 | 2007-12-27 | Nsk Ltd | センサ付軸受装置 |
| US20090266169A1 (en) | 2006-11-07 | 2009-10-29 | Universite De Reims Champagne Ardenne | Device and method for monitoring the vibratory condition of a rotating machine |
| JP2011191091A (ja) | 2010-03-12 | 2011-09-29 | Seiko Epson Corp | 音叉型振動片、振動子およびセンサー装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022507901A (ja) | 2022-01-18 |
| CN113396292B (zh) | 2023-11-28 |
| WO2020105008A1 (en) | 2020-05-28 |
| CN113396292A (zh) | 2021-09-14 |
| IT201800010522A1 (it) | 2020-05-22 |
| EP3884177C0 (en) | 2023-10-18 |
| EP3884177A1 (en) | 2021-09-29 |
| US11982584B2 (en) | 2024-05-14 |
| EP3884177B1 (en) | 2023-10-18 |
| US20220018392A1 (en) | 2022-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7457706B2 (ja) | ベアリングのための検出装置 | |
| CN112074716B (zh) | 机械应力传感器和制造方法 | |
| EP3789628B1 (en) | A vehicle brake pad and a production process thereof | |
| JP7458398B2 (ja) | ベアリングのためのセンサ付き支持装置 | |
| US6291932B1 (en) | Stacked piezoelectric element and producing method therefor | |
| JP4756309B2 (ja) | 高感度圧電素子 | |
| KR100979601B1 (ko) | 노크 센서 | |
| US20170010129A1 (en) | Multi-plate capacitive transducer | |
| US12038424B2 (en) | Gas sensor, component detection apparatus including gas sensor, inspection system including gas sensor, gas sensor inspection method, and gas sensor manufacturing method | |
| CN111033200A (zh) | 扭矩检测器及扭矩检测器的制造方法 | |
| JPH06207950A (ja) | 加速度センサ | |
| JP2016176741A (ja) | 加速度センサおよびその製造方法 | |
| JP2014016296A (ja) | 半導体物理量センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240220 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240315 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7457706 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |