以下、本開示の複数の実施形態を図面に基づいて説明する。尚、各実施形態において対応する構成要素には同一の符号を付すことにより、重複する説明を省略する場合がある。各実施形態において構成の一部分のみを説明している場合、当該構成の他の部分については、先行して説明した他の実施形態の構成を適用することができる。また、各実施形態の説明において明示している構成の組み合わせばかりではなく、特に組み合わせに支障が生じなければ、明示していなくても複数の実施形態の構成同士を部分的に組み合わせることができる。そして、複数の実施形態及び変形例に記述された構成同士の明示されていない組み合わせも、以下の説明によって開示されているものとする。
(第一実施形態)
本開示の第一実施形態による虚像表示装置の機能は、図1及び図2に示すヘッドアップディスプレイ(以下、HUD)100に実装されている。HUD100は、メータ表示装置30等と共に、表示システム110を構成している。表示システム110は、車両Aにおいて用いられ、HUD100による虚像表示と、メータ表示装置30による画面表示等とを連携させて、車両Aに関連する種々の情報をドライバに提示する。
HUD100及びメータ表示装置30は、車両Aに搭載された車載ネットワークの通信バスに通信可能に接続されている。車載ネットワークの通信バスには、カメラECU(Electronic Control Unit)21、ナビゲーションECU22及び運転支援ECU23等の他の車載ECUがさらに接続されている。通信バスにノードとして接続されたこれらの構成は、相互に通信可能である。これらECU等のうちの特定のノード同士は、相互に直接的に電気接続され、通信バス99を介することなく通信可能であってもよい。
カメラECU21は、プロセッサ、RAM及びストレージ等を有する処理装置であり、車両Aに搭載された一つ又は複数の車載カメラと電気的に接続されている。カメラECU21には、車載カメラによって撮像された車両周囲の映像データが入力される。カメラECU21は、車両Aの前方を撮影する車載カメラ(以下、フロントカメラ)の映像を解析し、前走車Af(図10参照)までの距離、自車左右の区画線Lml,Lmr(図7参照)の相対位置、及び自車前方の道路標識RS(図26参照)等を検出する。カメラECU21は、前走車Af及び区画線Lml,Lmr等の検出情報を運転支援ECU23に提供する。カメラECU21は、標識認識(Traffic Sign Recognition)機能によって認識した道路標識RSの認識情報を、HUD100及びメータ表示装置30に提供する。
ナビゲーションECU22は、プロセッサ、RAM及びストレージ等を有する処理装置であり、乗員によって設定された目的地までのルート案内を実施する。ナビゲーションECU22は、ルート案内の実施中に、直進、右左折、分岐及び合流等を案内する案内エリアに接近すると、当該案内エリアについての経路情報を、HUD100及びメータ表示装置30に提供する。
運転支援ECU23は、プロセッサ、RAM及びストレージ等を有する処理装置であり、車両Aのドライバの運転を支援する複数の支援機能を実現する。一例として、運転支援ECU23は、LDW(Lane Departure Warning)及びACC(Adaptive Cruise Control)等の運転支援機能を有している。
運転支援ECU23は、LDW機能により、カメラECU21から取得する区画線Lml,Lmrの検出情報に基づき、区画線Lml,Lmrからはみ出すような自車車線からの自車の逸脱を判定する。運転支援ECU23は、自車車線からの自車の逸脱を判定した場合、車線逸脱情報をHUD100及びメータ表示装置30へ提供し、ドライバへの車線逸脱警告を実施する。
運転支援ECU23は、ACC機能により、目標車速で車両Aを定速走行させるか、又はカメラECU21から取得する前走車Afの検出情報に基づき、前走車Afとの車間距離を維持しつつ、車両Aを前走車Afに追従走行させる。運転支援ECU23は、ACC機能が動作している場合、ACC機能の制御状態を示すステータス情報を、HUD100及びメータ表示装置30へ提供する。
次に、メータ表示装置30及びHUD100の構成の詳細を順に説明する。
メータ表示装置30は、車両Aに搭載される複数の表示デバイスのうちの一つであり、表示画面への画像の表示によってドライバに情報を提示する。メータ表示装置30は、コンビネーションメータに相当する構成であり、表示画面を運転席へ向けた姿勢で、インスツルメントパネル9に収容されている。一例として、メータ表示装置30は、車両Aの車室内にて、運転席に着座したドライバから視認容易な正面位置に設置されている。メータ表示装置30は、メータディスプレイ31及びメータECU32を備えている。
メータディスプレイ31は、例えば液晶ディスプレイ又は有機ELディスプレイ等である。メータディスプレイ31は、メータECU32から取得する映像データに基づき、スピードメータ画像、タコメータ画像、ナビ地図画像及び運転支援画像等を、表示画面に表示する。
メータECU32は、表示システム110において、HCU(Human Machine Interface Control Unit)として機能し、車両Aのユーザインターフェース機能を統括する電子制御装置である。メータECU32は、メータディスプレイ31、HUD100及びセンターディスプレイ等の表示デバイスによる表示を統合的に制御する。メータECU32は、通信バスに出力される種々の情報に基づき、メータディスプレイ31に提供する映像データを生成する。
メータECU32は、処理部、RAM、ストレージ、入出力インターフェース、及びこれらを接続するバス等を備えたコンピュータを主体として含む構成である。メータECU32は、後述するヘッドアップECU70と連携し、虚像表示のための演算処理を実行する。メータECU32は、虚像Viの表示に用いられる画像データを生成し、生成した画像データを、HUD100に逐次出力する。メータECU32は、後述する車線逸脱警告、ACCステータス、ターンバイターン及び標識認識等の虚像表示に用いられる画像データを生成し、HUD100に提供する。
HUD100は、車両Aに搭載される複数の表示デバイスのうちの一つであり、ドライバ前方の空間中に結像させる虚像Viにより、ドライバに情報を提示する。HUD100は、インスツルメントパネル9の内部に設けられた収容空間に収容されている。HUD100は、虚像Viとして結像される光(以下、虚像光Lvi)を、ウィンドシールドWSの投影範囲PAへ向けて投影する。ウィンドシールドWSに投影された虚像光Lviは、投影範囲PAにおいて運転席側へ反射され、ドライバによって知覚される。ドライバは、投影範囲PAを通して見える前景に、虚像Viが重畳された表示を視認する。
HUD100は、PGU(Picture Generation Unit)61、拡大光学系62、アクチュエータ63及びヘッドアップECU70を備えている。
PGU61は、LCD(Liquid Crystal Display)パネル及びバックライトを有している。PGU61は、LCDパネルの表示面を拡大光学系62へ向けた姿勢にて、HUD100の筐体に固定されている。PGU61は、映像データの各フレーム画像をLCDパネルの表示面に表示し、当該表示面をバックライトによって透過照明することで、虚像Viとして結像される虚像光Lviを拡大光学系62へ向けて射出する。
拡大光学系62は、合成樹脂又はガラス等からなる基材の表面にアルミニウム等の金属を蒸着させた凹面鏡を、少なくとも一つ含む構成である。拡大光学系62は、PGU61から射出された光を反射によって広げつつ、上方の投影範囲PAに投影する。
アクチュエータ63は、ウィンドシールドWSのうちで投影範囲PAとなる領域を機械的に移動させる機構である。投影範囲PAは、虚像光Lviが投影される範囲であり、ドライバからの見た目上で虚像Viが表示される範囲である。アクチュエータ63は、拡大光学系62の凹面鏡に規定された回転軸まわりに凹面鏡を回動させ、拡大光学系62からウィンドシールドWSへ向かう虚像光Lviの射出方向を変化させる。アクチュエータ63は、凹面鏡の姿勢変化により、虚像光Lviの投影範囲PA、ひいてはドライバによって視認される画角VAの位置を、少なくとも上下方向US(図1参照)に移動させる。
詳記すると、虚像Viを結像可能な空間中の仮想範囲を結像面ISと定義したとき、画角VAは、運転者のアイポイントEPと結像面ISの外縁とを結ぶ仮想線に基づき規定される視野角である。画角VAは、アイポイントEPから見て、運転者が虚像Viを視認できる角度範囲となる。HUD100では、垂直方向における垂直画角(例えば2°程度)よりも、水平方向における水平画角(例えば6°程度)の方が大きくされている。画角VAが上下方向USに移動することによれば、画角VA内となる前方範囲が変化する。一例として、アクチュエータ63が画角VAを最も下方(例えば俯角3°程度)に位置させた場合、10数m~20数mの前方範囲が、画角VA内の範囲となる。対して、アクチュエータ63が画角VAを最も上方(例えば俯角1°程度)に位置させた場合、30m~80m程度の前方範囲が、画角VA内の範囲となる。
ここで、前後方向ZG及び左右方向Yoは、水平面上に静止させた車両Aを基準として規定される。具体的に、前後方向ZGは、車両Aの長手方向(進行方向)に沿って規定される。また左右方向Yoは、車両Aの幅方向に沿って規定される。さらに、上下方向USは、前後方向ZG及び左右方向Yoを規定した水平面の鉛直方向に沿って規定される。尚、記載の簡略化のため、各方向を示す符号の記載は、適宜省略する。
ヘッドアップECU70は、PGU61及びアクチュエータ63を統合制御するHUD100の制御回路である。ヘッドアップECU70は、処理部、RAM、ストレージ、入出力インターフェース、及びこれらを接続するバス等を備えたコンピュータを主体として含む構成である。ヘッドアップECU70には、LCDパネル、バックライト及びアクチュエータ63を駆動するための駆動回路がさらに設けられている。
ヘッドアップECU70は、画角VAの位置に関連付けて、虚像Viとして表示するコンテンツを変更する。具体的に、ヘッドアップECU70は、アクチュエータ63の駆動制御により、虚像Viが表示される画角VAの位置を、通常位置VP1及び重畳位置VP2を含む複数の位置間で切り替える。ヘッドアップECU70は、アクチュエータ63による画角VAの位置の切り替えに応じて、通常位置VP1及び重畳位置VP2のそれぞれに紐づく虚像Viを表示させる。
通常位置VP1は、主に非重畳コンテンツCTnを虚像Viとして表示する画角位置である。通常位置VP1は、画角VAの基準位置であり、重畳位置VP2よりも使用される期間の長い常時位置に相当する。非重畳コンテンツCTnは、前景に重畳表示される表示物のうちで、後述する重畳コンテンツCTsを除いた表示物(非AR表示物)である。非重畳コンテンツCTnは、重畳コンテンツCTsとは異なり、重畳対象を特定されないで、投影範囲PA(画角VA)内の特定位置に表示される。故に、非重畳コンテンツCTnは、ウィンドシールドWS等の車両構成に相対固定されているようにドライバに視認される。通常位置VP1に非重畳コンテンツCTnによって車速等の車両情報を表示させた状態が、HUD100による虚像表示の基準状態となる(図5上段等参照)。
重畳位置VP2は、主に重畳コンテンツCTsを虚像Viとして表示する画角位置である。重畳位置VP2は、通常位置VP1よりも上方に規定される。重畳コンテンツCTsは、拡張現実(Augmented Reality,AR)表示に用いられるAR表示物である。重畳コンテンツCTsの表示位置は、例えば路面の特定位置、前方車両、歩行者及び道路標識等、前景中に存在する特定の重畳対象に関連付けられている。重畳コンテンツCTsは、画角VA内にある特定の重畳対象に重畳表示され、当該重畳対象に相対固定されているように、重畳対象を追って、ドライバの見た目上で移動可能である。重畳コンテンツCTsの形状は、重畳対象の相対位置及び形状に合わせて、所定の周期で更新され続ける。重畳コンテンツCTsは、非重畳コンテンツCTnよりも水平に近い姿勢で表示され、例えばドライバから見た奥行き方向に延伸した表示形状とされる。一例として、ドライバに通知すべき特定のイベントが発生した場合に、HUD100は、通常位置VP1から重畳位置VP2に画角VAを移動させ、重畳コンテンツCTsを表示する。
以上のように、画角位置及びコンテンツを連携させた虚像表示制御を実現するため、ヘッドアップECU70は、ストレージに記憶されたプログラム(虚像表示プログラム)を処理部によって実行し、複数の機能部を備える。具体的に、ヘッドアップECU70は、情報取得部71、データ収容部72及び表示制御部73等の機能部を備える。
情報取得部71は、通信バス及びメータECU32と接続されている。情報取得部71は、カメラECU21による道路標識RSの認識情報、ナビゲーションECU22による経路情報、並びに運転支援ECU23による車線逸脱情報及びステータス情報等を、通信バスから取得する。情報取得部71には、メータECU32によって生成される虚像表示のための画像データが逐次入力される。情報取得部71は、ARスイッチ68と電気的に接続されている。ARスイッチ68は、重畳コンテンツCTsを用いたAR表示のオン及びオフを切り替えるスイッチである。情報取得部71は、ARスイッチ68におけるオン及びオフの状態を検知する。
データ収容部72は、表示制御部73によって参照される複数のデータを収容する記憶領域である。データ収容部72は、RAM内に確保された記憶領域であってもよく、ストレージ内の一部の記憶領域であってもよい。データ収容部72には、ルックアップテーブル81、ミラー位置データ82,83及びグラフィックデータ84,85が表示制御部73によって参照可能に準備にされている。
ルックアップテーブル81(図2 Look up Table参照)は、画角位置とコンテンツとを紐付ける情報である(図3参照)。ミラー位置データ82(図2 Mirror Position Data A参照)は、画角VAを通常位置VP1に設定する場合の凹面鏡の角度位置を規定する情報である。ミラー位置データ83(図2 Mirror Position Data B参照)は、画角VAを重畳位置VP2に設定する場合の凹面鏡の角度位置を規定する情報である。各ミラー位置データ82,83は、ドライバのアイポイントEPの位置に合うように、ドライバによる調整が可能な値であってよい。グラフィックデータ84(図2 Graphic Data A参照)は、画角VAが通常位置VP1にある場合に使用される画像データ(素材データ)である。グラフィックデータ85(図2 Graphic Data B参照)は、画角VAが重畳位置VP2にある場合に使用される画像データ(素材データ)である。
表示制御部73は、PGU61及びアクチュエータ63を統合制御する制御部であり、PGU61へ向けて出力する映像データ及び制御信号と、アクチュエータ63へ向けて出力する駆動信号とを生成する。表示制御部73は、情報取得部71にて把握されるARスイッチ68のオン及びオフ状態に基づき、重畳位置VP2に画角VAを移動させる作動の有効及び無効を切り替える。表示制御部73は、ARスイッチ68がオフ状態である場合、画角VAを通常位置VP1に固定し、重畳コンテンツCTsの表示を中断する。
表示制御部73は、情報取得部71にて取得される情報と、ルックアップテーブル81の内容とに基づき、画角VAの位置を決定すると共に、決定した画角位置に基づき、虚像表示させるコンテンツを選択する。表示制御部73は、コンテンツの選択結果に基づき、映像データの生成に使用する画像の素材データを、各グラフィックデータ84,85からを抽出する。表示制御部73は、各グラフィックデータ84,85から生成した画像データと、メータECU32より提供される画像データとを適宜組み合わせ、映像データの各フレーム画像を生成する。表示制御部73は、連続した多数のフレーム画像よりなる映像データを、PGU61に逐次出力する。
表示制御部73は、画角VAの位置を移動させる場合、アクチュエータ63によって凹面鏡を機械的な回動させる作動に時間(例えば1秒程度)を必要とする。そのため、通常位置VP1及び重畳位置VP2の一方から他方への画角VAの移動を完了させた後に、移動後の画角VA内に虚像Vi(特定コンテンツCTis)を表示させる場合、画角VAの移動に起因した表示開始までのタイムラグが生じる。こうしたタイムラグがドライバの違和感を惹起しないように、表示制御部73は、特定コンテンツCTisに予め関連付けられた関連コンテンツCTrの表示を、画角VAの移動完了前に開始させる。
具体的に、表示制御部73は、図4及び図2に示すように、通常位置VP1から重畳位置VP2に画角VAを移動させる場合に、関連コンテンツCTrを表示させる。関連コンテンツCTrは、通常位置VP1から重畳位置VP2へとアクチュエータ63が画角VAを移動させた後に、重畳位置VP2の画角VA内に表示される特定コンテンツCTisと関連した様態で表示される。関連しているとは、例えば関連コンテンツCTrが特定コンテンツCTisに誘目すること、関連コンテンツCTrが特定コンテンツCTisと同化していくこと、特定コンテンツCTisの一部が関連コンテンツCTrとして表示されること等を意味する。また、別の一例として、ドライバに同一と認識される程度に類似又は同一の表示色とされることで、特定コンテンツCTis及び関連コンテンツCTrが表示上で関連付けられていてもよい。さらに、関連コンテンツCTrが特定コンテンツCTisと同一の情報を含む場合も、関連コンテンツCTrは、特定コンテンツCTisに関連する様態となる。
関連コンテンツCTrには、第一関連コンテンツCTr1及び第二関連コンテンツCTr2が含まれている。第一関連コンテンツCTr1は、通常位置VP1からの画角VAの移動をアクチュエータ63が開始させる時刻t1よりも前に、表示を開始される。第一関連コンテンツCTr1は、時刻t1にて表示を終了される。第一関連コンテンツCTr1は、例えば通常位置VP1にて表示される非重畳コンテンツCTnの背景として表示され、時刻t1にて表示を終了されるまでに複数回点滅する。
第二関連コンテンツCTr2は、アクチュエータ63によって画角VAが移動する移動中の期間(以下、移動期間TM1)において表示される。第二関連コンテンツCTr2は、第一関連コンテンツCTr1の表示が終了される時刻t1以後に表示を開始され、画角VAの移動が完了する時刻t2以前に表示を終了される。第二関連コンテンツCTr2は、第一関連コンテンツCTr1とは異なる様態のコンテンツである。例えば、第一関連コンテンツCTr1が非重畳コンテンツCTnとされる一方で、第二関連コンテンツCTr2は、重畳コンテンツCTs又は非重畳コンテンツCTnのいずれか一方とされる。表示制御部73は、画角位置が重畳位置VP2に近づくほど、第二関連コンテンツCTr2の輝度を連続的又は段階的に高くするトーンアップの表示変化を生じさせる。これにより、第二関連コンテンツCTr2は、画角VAの移動が経過するに従い、誘目性の高い表示物となる。
一方、重畳位置VP2から通常位置VP1に画角VAを移動させる場合、表示制御部73は、関連コンテンツCTrの表示を実施しない。表示制御部73は、重畳位置VP2から通常位置VP1への画角VAの移動をアクチュエータ63が開始する時刻t3よりも前に、特定コンテンツCTisの重畳表示を終了させる。表示制御部73は、アクチュエータ63によって画角VAが移動する移動中の期間(以下、移動期間TM2)において、全ての虚像表示を一時的に中断する。表示制御部73は、画角位置が通常位置VP1に到達する時刻t4、又は時刻t4から所定時間(例えば1秒程度)経過したタイミングで、非重畳コンテンツCTnの表示を再開させる。尚、一部の特定コンテンツCTisを表示させる場合、移動期間TM1にて表示する関連コンテンツCTrが、移動期間TM2においても表示されてよい。
メータECU32は、HUD100でのアクチュエータ63による画角VAの位置の切り替えに連携させて、メータディスプレイ31の表示画面の表示を変更する。メータECU32は、特定コンテンツCTisに関連する詳細情報PDiを表示画面に表示させている。詳細情報PDiは、特定コンテンツCTisと同種の情報であって、特定コンテンツCTisよりも詳細な内容を、ドライバに提示する。
通常位置VP1から重畳位置VP2への画角VAの移動がある場合、メータECU32は、時刻t1から時刻t2までの移動期間TM1において、画面表示された詳細情報PDiの画像輝度を連続的又は段階的に低くするトーンダウンの表示変化を生じさせる。これにより、画角VAの移動が経過するに従い、詳細情報PDiは、誘目性の低い表示物となる。その結果、メータ表示装置30の画面表示からHUD100による虚像表示に輝度が引き渡されるような表示変化となり、ドライバの視線が前景に誘導される。
メータECU32は、重畳位置VP2への画角VAの移動が完了する時刻t2において、詳細情報PDiを非表示とする。メータECU32は、画角VAが重畳位置VP2にあり、特定コンテンツCTisの表示が継続される期間において、詳細情報PDiの非表示の状態を継続する。これにより、詳細情報PDiがドライバを誘目して、外界の視認を阻害する事態は、生じなくなる。尚、詳細情報PDiを除く他の画像の画面表示は、時刻t2から時刻t3の期間においても継続される。
一方、重畳位置VP2から通常位置VP1への画角VAの移動がある場合、メータECU32は、特定コンテンツCTisの表示が終了されるタイミングで、詳細情報PDiの画面表示を再開させる。一例として、画角VAの移動が開始される時刻t3にて、詳細情報PDiの表示は再開される。以上により、特定コンテンツCTisが非表示になった後も、特定コンテンツCTisによって提供されていた情報を確認できる状態が維持される。
次に、通常位置VP1から重畳位置VP2へ画角VAを移動させて、特定コンテンツCTisを表示させる複数のシーンを、図5~図31に基づき、図1~図4を参照しつつ、以下説明する。
<車線逸脱警告>
図5~図10には、表示システム110によって実施される車線逸脱警告が複数パターン例示されている。図5~図7にはパターン1の車線逸脱警告が示されており、図5,図6及び図7にはパターン2の車線逸脱警告が示されており、図5,図9及び図10にはパターン3の車線逸脱警告が示されている。
表示制御部73は、パターン1~3の車線逸脱警告が開始される以前に、通常位置VP1にある画角VAにスピードメータCTvを表示させている(図5上段参照)。スピードメータCTvは、車速をデジタル表示する非重畳コンテンツCTnである。表示制御部73は、情報取得部71による車線逸脱情報の取得をトリガとして、車線逸脱警告の実施を決定する。表示制御部73は、スピードメータCTvの表示を継続しつつ、点滅背景CTBを表示させる(図5下段参照)。
点滅背景CTBは、第一関連コンテンツCTr1として表示される非重畳コンテンツCTnである。点滅背景CTBは、画角VAの全体を塗り潰すような横長の矩形状の画像である。点滅背景CTBは、スピードメータCTvの視認を妨げないよう、スピードメータCTvの背景となるように表示される。点滅背景CTBは、例えば赤色等の警告色の虚像Viとされる。点滅背景CTBは、複数回の点滅後、時刻t1にてスピードメータCTvと共に表示を終了される。
パターン1の車線逸脱警告では、時刻t1にて画角VAの移動が開始されると、表示制御部73は、誘導コンテンツCTGnの表示を開始させる(図6上段参照)。誘導コンテンツCTGnは、第二関連コンテンツCTr2として表示される非重畳コンテンツCTnである。誘導コンテンツCTGnは、点滅背景CTBとは異なる様態の関連コンテンツCTrであり、画角VAの一部を塗り潰すように表示される非点滅の画像である。誘導コンテンツCTGnは、画角VAの下縁に接する横長矩形状を呈し、点滅背景CTBと同様に赤色等の警告色の虚像Viとされる。誘導コンテンツCTGnの上下方向の幅は、表示開始の時点で垂直画角の半分から3分の1程度とされる。表示制御部73は、画角VAの上方への移動に合わせて誘導コンテンツCTGnを上下方向に縮小しつつ、ドライバの見た上において誘導コンテンツCTGnの全体を上方へ移動させる(図6下段参照)。表示制御部73は、画角VAが重畳位置VP2に到達する時刻t2以前に誘導コンテンツCTGnの表示を終了させる。
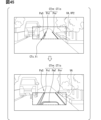
表示制御部73は、時刻t2にて重畳位置VP2への画角VAの移動を完了すると、逸脱警告コンテンツCTdwの表示を開始させる(図7上段参照)。逸脱警告コンテンツCTdwは、車線逸脱警告における特定コンテンツCTisである。逸脱警告コンテンツCTdwは、前景中の自車車線の路面を重畳の対象物とする重畳コンテンツCTsであり、走行中の自車車線からの車両Aの逸脱を警告する。逸脱警告コンテンツCTdwは、路面重畳画像Prs及び境界強調画像Pelを含んでいる。
路面重畳画像Prsは、赤色等の警告色で虚像表示され、自車車線の前方路面の一部を塗り潰すように重畳表示される。車両Aが左側の区画線Lmlから逸脱しそうな場合、路面重畳画像Prsは、自車左側の区画線Lmlの近傍に重畳される。路面重畳画像Prsは、自車左側の区画線Lmlから自車右側の区画線Lmrへ向けて、繰り返し移動するアニメーションとして表示され(図7下段参照)、自車車線の中央への移動をドライバに促す。
境界強調画像Pelは、路面重畳画像Prsとは異なる表示色(例えば白色)の画像である。車両Aが自車車線の左側に逸脱しそうな場合、境界強調画像Pelは、自車左側の区画線Lmlに沿って細帯状に延伸する形状で、路面重畳画像Prsと区画線Lmlとの間に配置される。境界強調画像Pelは、路面重畳画像Prsのアニメーションに合わせて表示及び非表示の各状態を繰り返し、路面重畳画像Prsが区画線Lmlから離れるタイミングで非表示となる(図7下段参照)。尚、車両Aが自車車線の右側に逸脱しそうな場合、路面重畳画像Prs及び境界強調画像Pelは、自車右側に区画線Lmrに沿って表示される。
パターン2の車線逸脱警告では、時刻t1にて画角VAの移動が開始されると、表示制御部73は、路面重畳画像Prs及び誘導コンテンツCTGsの表示を開始させる(図8上段参照)。路面重畳画像Prs及び誘導コンテンツCTGsは、第二関連コンテンツCTr2として表示される重畳コンテンツCTsである。
路面重畳画像Prsは、逸脱警告コンテンツCTdw(図9参照)の一部であり、自車車線の前方路面の一部を塗り潰すように、逸脱側の区画線Lmlに臨む位置に重畳表示される。路面重畳画像Prsは、前方路面と共に自車に接近する重畳コンテンツCTsであってもよく、自車から所定距離の前方路面に重畳される重畳コンテンツCTsであってもよい。
誘導コンテンツCTGsは、点滅背景CTB(図5参照)とは異なる様態の関連コンテンツCTrであり、画角VAの一部を塗り潰すように表示される。誘導コンテンツCTGsは、パターン1の誘導コンテンツCTGn(図6参照)と同様に、画角VAの下縁に接した横長矩形状を呈する赤色等の虚像Viである。誘導コンテンツCTGsは、ドライバから見て路面重畳画像Prsの手前側に配置される。表示制御部73は、画角VAの上方への移動中に前景中の消失点へ向けて誘導コンテンツCTGsを移動させる。具体的に、誘導コンテンツCTGsは、画角VAの上方への移動に合わせて、アスペクト比を維持したまま上下方向及び左右方向に縮小されつつ、区画線Lml,Lmrの間に収まるように上方へ移動する(図8下段参照)。こうした様態変化により、誘導コンテンツCTGsは、自車車線を奥側に移動するように視認され、ドライバの視線を遠方に誘導する。
表示制御部73は、時刻t2にて重畳位置VP2への画角VAの移動を完了すると、逸脱警告コンテンツCTdwの表示を開始させる(図9上段参照)。パターン2の逸脱警告コンテンツCTdwは、路面重畳画像Prs及び境界強調画像Pelを含む重畳コンテンツCTsである。路面重畳画像Prsは、上述したように画角VAの移動中に表示を開始され、画角VAの移動が完了した後も表示を継続される。路面重畳画像Prsは、自車から所定の距離にある前方路面に重畳される。
境界強調画像Pelは、例えば白色等で描画され、路面重畳画像Prsに重ねて表示される。境界強調画像Pelは、自車車線の中央への移動をドライバに促すように、中央側を指し示す三角形状に描画される。表示制御部73は、逸脱側の区画線Lmlに沿って複数の境界強調画像Pelを所定の間隔で表示させる。複数の境界強調画像Pelは、自車の走行に合わせて、拡大されつつ区画線Lmlに沿って路面重畳画像Prs上を移動し、前方路面と共に自車に接近するようにドライバに視認される(図9下段参照)。
パターン3の車線逸脱警告では、パターン2の誘導コンテンツCTGs(図8参照)の表示が省略される。表示制御部73は、路面重畳画像Prsを第二関連コンテンツCTr2として表示させる(図10上段参照)。路面重畳画像Prsは、逸脱側の区画線Lmlに臨む配置で重畳表示され、上方への画角VAの移動に合わせて、自車車線からはみ出さない範囲で、前景中の消失点へ向けて拡大される(図10上段参照)。路面重畳画像Prsは、画角VAの移動が完了した後も、逸脱警告コンテンツCTdwの一部として、重畳位置VP2の画角VA内に継続表示される(図9参照)。
<ACCステータスの変更通知>
図11~図19には、表示システム110によって実施されるACCステータスの変更通知が複数パターン例示されている。図11~図13にはパターン1のACCステータスの変更通知が示されており、図11,図14及び図15にはパターン2のACCステータスの変更通知が示されている。さらに、図11,図16及び図17にはパターン3のACCステータスの変更通知が示されており、図11,図18及び図19にはパターン4のACCステータスの変更通知が示されている。
運転支援ECU23にてACC機能が作動している場合、通常位置VP1にある画角VAには、スピードメータCTvに加えて、目標車速CTts及び目標車間CTtdが表示される(図11上段参照)。目標車速CTts及び目標車間CTtdは、ACC機能に設定された制御目標値を示す非重畳コンテンツCTnである。目標車速CTtsは、ACC機能が車両Aを定速巡航させる場合に上限となる車速を示す。目標車間CTtdは、ACC機能が車両Aを前走車Afに追従走行させる場合の車間距離の長さ(以下、目標車間距離)を示す。
ACCステータスの変更通知は、ACC機能に設定された目標車間距離がドライバによって変更(長く)された場合に実施される(図11下段参照)。ACCステータスの変更通知が開始される以前の表示は、パターン1~4で共通している。表示制御部73は、目標車間距離の変更を示すステータス情報の取得をトリガとして、ACCステータスの変更通知の実施を決定し、画角VAの移動を開始させる時刻t1以前に、スピードメータCTv及び目標車速CTtsを非表示とする。
パターン1のACCステータスの変更通知では、時刻t1にて画角VAの移動が開始されると、表示制御部73は、目標車間CTtdの表示輝度を徐々に低下させる。こうしたトーンダウンの表示変化により、目標車間CTtdは、移動期間TM1にて非表示となる。加えて表示制御部73は、部分表示コンテンツCTusの表示を開始させる(図12参照)。
部分表示コンテンツCTusは、関連コンテンツCTrとして表示される。部分表示コンテンツCTusは、画角VAの移動完了後に表示される特定コンテンツCTis(図13参照)の一部である。画角VAが上方に移動する場合、特定コンテンツCTisの下側部分が、部分表示コンテンツCTusとして表示される。部分表示コンテンツCTusは、ブロック画像Pdb及び一組の区画線画像Pblを含む重畳コンテンツCTsであり、前方路面に重畳表示される。
表示制御部73は、時刻t2にて重畳位置VP2への画角VAの移動を完了すると、車間通知コンテンツCTfdの表示を開始させる(図13上段参照)。車間通知コンテンツCTfdは、ACCステータスの変更通知における特定コンテンツCTisである。車間通知コンテンツCTfdは、前景中の自車車線の路面を重畳の対象物とする重畳コンテンツCTsであり、ACC機能による車間維持制御の動作状態の変化、具体的には、前走車Afまでの車間距離を拡大するための減速制御の実施をドライバに通知する。車間通知コンテンツCTfdは、ブロック画像Pdb及び一組の区画線画像Pblを含んでいる。
ブロック画像Pdbは、青色又は緑色等で虚像表示され、自車車線の前方路面の中央に重畳される台形状の画像である。ブロック画像Pdbは、ドライバの見た目上において前走車Afと重ならないように、前走車Afの下方に表示される。ACC機能による減速制御により前走車Afまでの車間距離が拡大すると、表示制御部73は、前走車Afの下方に表示するブロック画像Pdbの数を増加させる(図13上段参照)。
区画線画像Pblは、ブロック画像Pdbと実質同一の青色又は緑色等で虚像表示され、ブロック画像Pdbの両側に一つずつ重畳される。各区画線画像Pblは、隣接する区画線Lml,Lmrに沿って自車側から消失点へ向けて延伸する細帯状の画像である。区画線画像Pblは、ドライバの見た目上での前走車Afとの重なりを許容されており、重畳位置VP2にある画角VAの下縁から上縁まで斜め方向に延伸している。
表示制御部73は、ACC機能による目標車間距離の変更が完了すると、ACCステータスの変更通知を終了し、画角VAを通常位置VP1に復帰させる。車間通知コンテンツCTfdは、画角VAの移動が開始される時刻t3以前に非表示とされてもよく、画角VAの移動に合わせて上側から下側へ向けて徐々に非表示とされてもよい。表示制御部73は、時刻t4にて通常位置VP1への画角VAの移動を完了すると、スピードメータCTv、目標車速CTts及び目標車間CTtdの表示を再開させる(図11上段参照)。
パターン2のACCステータスの変更通知でも、時刻t1にて画角VAの移動が開始されると、表示制御部73は、目標車間CTtdをトーンダウンによって非表示としつつ、部分表示コンテンツCTusの表示を開始させる(図14参照)。部分表示コンテンツCTusは、画角VAの移動完了後に表示される特定コンテンツCTis(図15参照)の一部であり、バー画像Pbr及び一組の区画壁画像Pbbを含んでいる。表示制御部73は、部分表示コンテンツCTusと共に、スピードメータCTvをさらに表示させる。バー画像Pbr、区画壁画像Pbb及びスピードメータCTvは、画角VAの移動に合わせて、下側から上側へ徐々に表示されていく。
表示制御部73は、時刻t2にて重畳位置VP2への画角VAの移動を完了すると、車間通知コンテンツCTfdの表示を開始させる(図15上段参照)。車間通知コンテンツCTfdは、上述したバー画像Pbr及び一組の区画壁画像Pbbを含んでいる。バー画像Pbrは、パターン1のブロック画像Pdb(図13参照)に相当する画像であり、水平方向に棒状に延伸する形状である。バー画像Pbrは、ドライバの見た目上において前走車Af及びスピードメータCTvの間に表示される。ACC機能の減速制御によって前走車Afまでの車間距離が拡大されると、前走車Afの下方に表示されるバー画像Pbrの数は、増加する(図15下段参照)。
区画壁画像Pbbは、パターン1の区画線画像Pbl(図13参照)に相当する画像であり、バー画像Pbr及びスピードメータCTvの両側に重畳される。各区画壁画像Pbbは、路面から上方に立設された壁形状の画像部を複数含み、隣接する区画線Lml,Lmrに沿って壁状に並んでいる。各区画壁画像Pbbは、ACC機能による減速制御によって前走車Afまでの車間距離が拡大すると、壁形状の画像部の数を増加させる(図15下段参照)。
パターン3のACCステータスの変更通知でも、時刻t1にて画角VAの移動が開始されると、表示制御部73は、目標車間CTtdをトーンダウンさせつつ、部分表示コンテンツCTusの表示を開始させる(図16参照)。部分表示コンテンツCTusは、画角VAの移動完了後に表示される特定コンテンツCTis(図17参照)の一部であり、当該特定コンテンツCTisの関連コンテンツCTrである。部分表示コンテンツCTusは、前方路面に重畳表示されるブロック画像Pdb及び一組の区画線画像Pblを含んでいる。ブロック画像Pdb及び区画線画像Pblは、画角VAの上方への移動に合わせて、下側から上側へ徐々に表示されていく。
表示制御部73は、時刻t2にて重畳位置VP2への画角VAの移動を完了すると、ブロック画像Pdb及び各区画線画像Pblの全体を描画することで、特定コンテンツCTisとしての車間通知コンテンツCTfdの表示を開始させる(図17上段参照)。ブロック画像Pdbは、台形枠状に描画され、前走車Afを下方から強調する強調部を含んでいる。ACC機能の減速制御によって前走車Afまでの車間距離が拡大すると、複数のブロック画像Pdbが強調部の下方に連続的に描画される(図17下段参照)。区画線画像Pblは、パターン1の区画線画像Pbl(図13参照)と実質同一の細帯状の画像である。各区画線画像Pblは、ブロック画像Pdbの左右両側に、区画線Lml,Lmrに沿った姿勢で配置される。
パターン4のACCステータスの変更通知でも、時刻t1にて画角VAの移動が開始されると、表示制御部73は、目標車間CTtdをトーンダウンさせつつ、部分表示コンテンツCTus及びスピードメータCTvの表示を開始させる(図18参照)。部分表示コンテンツCTusは、特定コンテンツCTis(図19参照)の一部であり、当該特定コンテンツCTisの関連コンテンツCTrである。部分表示コンテンツCTusは、ブロック画像Pdb及び区画線画像Pblを含む重畳コンテンツCTsである。ブロック画像Pdb、各区画線画像Pbl及びスピードメータCTvは、画角VAの上方への移動に合わせて、下側から上側へ徐々に表示されていく。
表示制御部73は、時刻t2にて重畳位置VP2への画角VAの移動を完了すると、特定コンテンツCTisとしての車間通知コンテンツCTfdの表示を開始させる。(図19上段参照)。車間通知コンテンツCTfdは、スピードメータCTvの奥側に表示される。車間通知コンテンツCTfdには、画角VAの移動中に表示を開始されたブロック画像Pdb及び区画線画像Pblに加えて、バー画像Pbrが含まれている。ブロック画像Pdb及び区画線画像Pblは、パターン1(図13参照)と実質同一の画像である。バー画像Pbrは、前走車Afの下方の路面に重畳され、前走車Afを下側から強調する。表示制御部73は、ACC機能の減速制御によって前走車Afまでの車間距離が拡大すると、バー画像Pbrを上方へ移動させつつ、バー画像Pbrの下側に複数のブロック画像Pdbを追加表示する(図19下段参照)。
<ターンバイターン表示>
図20~図25には、表示システム110によって実施される経路案内が複数パターン例示されている。図20~図22にはパターン1の経路案内におけるターンバイターン表示が示されており、図20,図21及び図23にはパターン2のターンバイターン表示が示されている。さらに、図20,図21及び図24にはパターン3のターンバイターン表示が示されており、図20,図21及び図25にはパターン4のターンバイターン表示が示されている。
ナビゲーションECU22による目的地への経路案内が実施されている場合、案内ポイントの接近に伴い、通常位置VP1にある画角VAには、スピードメータCTvに加えて、ルートアイコンCTirが表示される(図20下段参照)。案内ポイントは、例えば交差点、合流区間及び分岐区間等の案内エリア内に特定のノードを基準に設定される。
ルートアイコンCTirは、案内ポイントまでの残距離と、案内ポイントでの右左折等の方向を示す非重畳コンテンツCTnである。表示制御部73は、直近の案内エリアについての経路情報が情報取得部71にて取得されたことをトリガとして、ターンバイターン表示の実施を決定する。表示制御部73は、ルートアイコンCTirを表示させた後、スピードメータCTv及びルートアイコンCTirを含む全てのコンテンツを非表示とし、重畳位置VP2への画角VAの移動を開始する。
表示制御部73は、時刻t1にて画角VAの移動を開始させると、画角VAが移動する移動期間TM1にて、レーン強調コンテンツCTelの表示を開始させる(図21参照)。レーン強調コンテンツCTelは、関連コンテンツCTrとして表示される重畳コンテンツCTsあり、前景中の自車車線の路面に重畳されて、走行中の自車車線を強調する。レーン強調コンテンツCTelは、左右の区画線Lml,Lmrの内側に配置される細帯状の画像である(図21上段参照)。レーン強調コンテンツCTelは、画角VAの上方への移動に合わせて、各区画線Lml,Lmrに沿って伸びていく(図21下段参照)。以上のように、ターンバイターン表示を行う場合に、関連コンテンツCTrとしてレーン強調コンテンツCTelを表示する処理は、パターン1~4において共通している。
パターン1のターンバイターン表示では、時刻t2にて重畳位置VP2への画角VAの移動を完了すると、特定コンテンツCTisとしての経路案内コンテンツCTrgの表示が開始される(図22上段参照)。経路案内コンテンツCTrgには、接近通知画像Pap及び地点通知画像Ptpが含まれている。
接近通知画像Papは、時刻t2にて画角VAの下縁近傍に表示される。接近通知画像Papは、案内ポイントにおける自車の転回方向を指し示す複数の三角形状の画像部を有している。表示制御部73は、自車が案内ポイントへ接近するに従い、接近通知画像Papを拡大させつつ、画角VAの中央へ徐々に移動させる(図22下段参照)。
地点通知画像Ptpは、路面から浮かんでいるような様態で案内ポイントに重畳表示される。地点通知画像Ptpは、接近通知画像Papと同様に、自車の転回方向を指し示す複数の三角形状の画像部を有している。地点通知画像Ptpは、接近通知画像Papよりも後に画角VA内に表示され、自車が案内ポイントへ接近するに従って画角VAの中央に移動する。地点通知画像Ptpは、自車が交差点に進入するタイミングで、上方に移動してきた接近通知画像Papと衝突する。地点通知画像Ptp及び接近通知画像Papは、見た目上での衝突後に一体化されて、自車の転回方向をドライバに明示する非重畳コンテンツCTnとなる。
表示制御部73は、自車が案内ポイントである交差点から退出すると、経路案内コンテンツCTrgを非表示とした後、通常位置VP1への画角VAの移動を開始させる。表示制御部73は、通常位置VP1への画角VAの移動を完了させた所定時間後に、スピードメータCTvの表示を再開させる(図20上段参照)。
パターン2のターンバイターン表示では、時刻t2にて重畳位置VP2への画角VAの移動が完了した後も、一対のレーン強調コンテンツCTelの表示が継続される(図23上段参照)。表示制御部73は、レーン強調コンテンツCTelによる自車車線の強調を所定時間継続させた後、経路案内コンテンツCTrgに含まれる表示物を、レーン強調コンテンツCTelから接近通知画像Papに切り替える(図23中段参照)。接近通知画像Papは、自車の転回方向を指し示す複数の三角形状の画像部を有している。複数の三角形状の画像部は、自車の進行方向に沿って、自車車線の路面中央に一列に並んで重畳表示される。各画像部は、案内ポイントに自車が接近するに従って、画角VAの下方に連続的に移動し、順にフレームアウトする。
表示制御部73は、自車が交差点に進入するタイミングで、経路案内コンテンツCTrgに含まれる表示物を、接近通知画像Papから地点通知画像Ptpへと切り替える(図23下段参照)。地点通知画像Ptpは、転回方向を示す三角形状の画像部を複数組み合わせてなる非重畳コンテンツCTnである。地点通知画像Ptpは、右左折を開始した後も自車が交差点から退出するまで表示を継続される。
パターン3のターンバイターン表示では、時刻t2にて重畳位置VP2への画角VAの移動が完了した後、一対のレーン強調コンテンツCTelの表示が継続されると共に、バー画像Pbrが追加表示される(図24上段参照)。バー画像Pbrは、画角VAの水平方向に沿って棒状に延伸する画像であり、一対のレーン強調コンテンツCTelの間に配置される。
表示制御部73は、レーン強調コンテンツCTel及びバー画像Pbrによる自車車線の強調を所定時間継続した後、経路案内コンテンツCTrgに含まれる表示物を、接近通知画像Papに切り替える(図24中段参照)。接近通知画像Papは、案内ポイントまでの残距離を数値で示す画像部と、案内ポイントでの右左折の方向を示す矢印形状の画像部とを有している。接近通知画像Papは、案内ポイントに自車が接近するに従って路面と共に自車側に移動し、画角VAから順にフレームアウトする。
表示制御部73は、案内ポイントが画角VA内に入るタイミングで、経路案内コンテンツCTrgに含まれる表示物を、接近通知画像Papから地点通知画像Ptpへと切り替える(図24下段参照)。地点通知画像Ptpは、転回方向を示す三角形状の穴部が形成された横長矩形状の画像である。地点通知画像Ptpは、重畳位置VP2にある画角VAの略全体に表示される。地点通知画像Ptpは、右左折が開始された後も、自車が交差点から退出するまで表示を継続される。
パターン4のターンバイターン表示では、時刻t2にて重畳位置VP2への画角VAの移動が完了した後、接近通知画像Papを含む経路案内コンテンツCTrgの表示が開始される。接近通知画像Papは、画角VAの右隅に積み上げられた複数のブロック状の画像部(以下、固定画像部)と、路面に重畳されて自車に接近する複数のブロック状の画像部(以下、移動画像部)とを含んでいる(図25下段参照)。最下段の固定画像部は、自車に接近する移動画像部との衝突によって消失する(図25中段参照)。こうしたアニメーションの繰り返しにより、接近通知画像Papは、案内ポイントの接近をドライバに示す。
表示制御部73は、案内ポイントが画角VA内に入るタイミングで、経路案内コンテンツCTrgに含まれる表示物を、接近通知画像Papから地点通知画像Ptpへと切り替える(図25下段参照)。地点通知画像Ptpは、転回方向を示す三角形状の画像部を複数含む非重畳コンテンツCTnである。パターン4のターンバイターン表示でも、地点通知画像Ptpは、自車が交差点から退出するまで表示を継続される。
<標識認識支援表示>
図26~図31には、表示システム110によって実施される標識認識支援表示が複数パターン例示されている。標識認識支援表示では、関連コンテンツCTrは表示されない。図26~図28にはパターン1の標識認識支援表示が示されており、図26,図28及び図29にはパターン2の標識認識支援表示が示されている。さらに、図26,図28及び図30にはパターン3の標識認識支援表示が示されており、図26,図28及び図31にはパターン4の標識認識支援表示が示されている。
カメラECU21の標識認識機能が作動している場合、通常位置VP1にある画角VAには、スピードメータCTvに加えて、標識アイコンCTrsが表示される(図26参照)。標識アイコンCTrsは、過去に認識された道路標識RS(例えば制限速度60km/h)を模した非重畳コンテンツCTnである。カメラECU21が自車前方の道路標識RSを新たに検出すると、カメラECU21からHUD100に、検出した道路標識RSについての認識情報が出力される。表示制御部73は、情報取得部71による道路標識RSの認識情報の取得をトリガとして、標識認識支援表示の実施を決定する。パターン1~4の標識認識支援表示では、時刻t1,t3にて画角VAの移動が開始される以前に、スピードメータCTv及び標識アイコンCTrs、又は認識支援コンテンツCTra(図27参照)等のコンテンツは、非表示とされる。加えて、パターン1~4の標識認識支援表示では、画角VAの移動期間TM1,TM2において、全てのコンテンツの表示が一時的に中断される。
パターン1の標識認識支援表示では、時刻t2にて重畳位置VP2に移動した画角VA内に、認識支援コンテンツCTraの表示が開始される(図27上段参照)。表示制御部73は、認識支援コンテンツCTraとして変更予告画像Ppnを最初に表示させる。変更予告画像Ppnは、道路標識RSを模した画像であり、新たに検出された道路標識RS(例えば制限速度40km/h)の内容を示す。変更予告画像Ppnは、標識アイコンCTrs(図26参照)よりも低彩度に描画され、標識アイコンCTrsよりも大きなサイズで虚像表示される。
表示制御部73は、道路標識RSが接近すると、変更予告画像Ppnに加えて、地点通知画像Ptpをさらに表示させる(図27中段参照)。地点通知画像Ptpは、水平方向に延伸する棒状の画像であり、道路標識RSの設置位置を基準として、自車前方の路面に重畳表示される。地点通知画像Ptpは、自車前方の路面と共に変更予告画像Ppnに接近する。表示制御部73は、地点通知画像Ptpが変更予告画像Ppnと接触するタイミングで、輝度及び彩度を一時的に高めることにより、変更予告画像Ppnを強調表示させる(図27下段参照)。
表示制御部73は、認識支援コンテンツCTraの表示を終了させた後、時刻t3にて画角VAの通常位置VP1への移動を開始する。表示制御部73は、通常位置VP1への画角VAの移動が完了する時刻t4の後に、スピードメータCTv及び標識アイコンCTrsの表示を再開させる(図28参照)。再表示された標識アイコンCTrsは、直前に非表示とされた変更予告画像Ppnと同一の内容(制限速度40km/h)となる。
パターン2の標識認識支援表示では、重畳位置VP2に移動した画角VAの下縁から変更予告画像Ppnがフレームインするアニメーションにより、認識支援コンテンツCTraの表示が開始される(図29上段参照)。表示制御部73は、パターン1と同様に、地点通知画像Ptpをさらに表示させた後、地点通知画像Ptpを変更予告画像Ppnに衝突させる(図29中段参照)。表示制御部73は、地点通知画像Ptpと変更予告画像Ppnとを接触させた後、変更予告画像Ppnを強調状態のまま奥側に倒し、路面に貼り付いた姿勢に変化させる(図29下段参照)。
加えて表示制御部73は、地点通知画像Ptpに替えて、波紋画像Pwを表示させる。波紋画像Pwは、水平方向に延伸する棒状の画像であり、自車車線の路面に重畳表示される。波紋画像Pwは、自車車線に沿って進行方向へ高速で移動することで、新しい道路標識RSが有効となる区間を示唆する。表示制御部73は、画角VAから波紋画像Pwがフレームアウトするタイミングで認識支援コンテンツCTraの表示を終了させ、画角VAを通常位置VP1に戻す処理を開始する。
パターン3の標識認識支援表示では、重畳位置VP2に移動した画角VA内に、認識支援コンテンツCTraに加えて、スピードメータCTvが表示される。認識支援コンテンツCTraには、変更予告画像Ppn及び現在標識画像Pspが含まれている。変更予告画像Ppnは、現在標識画像Pspの奥側に表示される(図30上段参照)。変更予告画像Ppnは、自車前方の路面と共に自車側に移動し、現在標識画像Pspに接近する(図30中段参照)。
現在標識画像Pspは、変更予告画像Ppnと同様に道路標識RSを模した画像である(図30上段参照)。現在標識画像Pspは、直前に非表示とされた標識アイコンCTrs(図28参照)と同一の内容(制限速度60km/h)を示す。現在標識画像Pspは、変更予告画像Ppnよりも手前側となる画角VA内の所定位置に表示される。
表示制御部73は、自車側に移動する変更予告画像Ppnを現在標識画像Pspに衝突させ、現在標識画像Pspの表示を終了させる(図30下段参照)。表示制御部73は、現在標識画像Pspに替えて、輝度及び彩度を高めた強調様態の変更予告画像Ppnを非重畳コンテンツCTnとして表示させる。その後、表示制御部73は、認識支援コンテンツCTraの表示を終了させ、画角VAの通常位置VP1への移動を開始させる。
パターン4の標識認識支援表示では、パターン2と実質同一の変更予告画像Ppn及び地点通知画像Ptpが認識支援コンテンツCTraとして表示される(図31上段及び中段参照)。パターン4では、波紋画像Pwの様態が、パターン2とは異なっている。具体的に、表示制御部73は、変更予告画像Ppnを奥側に傾斜させた後、変更予告画像Ppnから放射状に広がる円弧状の波紋画像Pwを表示させる(図31下段参照)。表示制御部73は、変更予告画像Ppnを起点として波紋画像Pwが広がるアニメーションを複数回繰り返し表示させた後、認識支援コンテンツCTraの表示を終了させる。
ここまで説明した虚像表示方法を実現するための表示制御処理の詳細を、図32及び図33に基づき、図1及び図4を参照しつつ説明する。図32に示す表示制御処理は、画角VAの位置に紐付けてコンテンツを表示させる処理であり、起動後の初期処理を完了したヘッドアップECU70によって開始される。図33に示す表示制御処理は、HUD100による画角VAの移動に合わせて、表示画面の詳細情報PDiの状態を変更する処理であり、起動後の初期処理を完了したメータECU32によって開始される。
図32に示す表示制御処理のS101では、ARスイッチ68のオンオフを示す信号を検出し、S102に進む。S102では、S101にて検出した信号に基づき、重畳位置VP2へ移動させた画角VA内に重畳コンテンツCTsを表示させるAR機能がオン状態にあるか否かを判定する。S102にて、AR機能がオフ状態にあると判定した場合、S112に進む。一方、S102にて、AR機能がオン状態にあると判定した場合、S103に進む。
S103では、情報取得部71にて取得される種々の情報に基づき、ルックアップテーブル81を参照することで、画角VAの位置と、虚像表示するコンテンツとを決定し、S104に進む。S104では、S103での決定に基づき、画角VAの位置を切り替える切替作動の要否を判定する。S104にて、切替作動が不要であり、現在の画角位置を維持すると判定した場合、S111に進む。一方、S104にて、切替動作が必要と判定した場合、S105に進む。
S105では、切替作動の方向を判定する。重畳位置VP2から通常位置VP1へ画角VAを移動させる場合、S105からS106に進む。S106では、虚像Viの表示を全て終了させ、S107に進む。S107では、通常位置VP1に紐づくミラー位置データ82に基づき、拡大光学系62の凹面鏡を回動させて、画角VAを通常位置VP1に移動させる。
一方、通常位置VP1から重畳位置VP2へ画角VAを移動させる場合、S105からS108に進む。S108では、グラフィックデータ84を参照し、第一関連コンテンツCTr1の表示を開始させ、S109に進む。S109では、重畳位置VP2に紐づくミラー位置データ83に基づき、凹面鏡の回動による重畳位置VP2への画角VAの移動を開始させ、S110に進む。S110では、グラフィックデータ85を参照し、第二関連コンテンツCTr2の表示を開始させ、S111に進む。尚、特定コンテンツCTisに紐づく第一関連コンテンツCTr1がない場合、S108は省略されてよい。同様に、特定コンテンツCTisに紐づく第二関連コンテンツCTr2がない場合、S110は省略されてよい。
S111では、画角位置を判定する。S111にて、通常位置VP1が維持されるか、又は通常位置VP1への移動が完了したと判定した場合、S112に進む。S112では、ミラー位置データ82に基づき、画角VAを通常位置VP1に設定し、S113に進む。S113では、グラフィックデータ84を参照し、S103にて決定された非重畳コンテンツCTnの表示を開始させる。尚、S107にて、通常位置VP1のミラー位置データ82が既に読み込まれている場合、S112は省略されてよい。
一方、S111にて、重畳位置VP2が維持されるか、又は重畳位置VP2への移動が完了したと判定した場合、S114に進む。S114では、ミラー位置データ83に基づき、画角VAを重畳位置VP2に設定し、S115に進む。S115では、グラフィックデータ85を参照し、S103にて決定された重畳コンテンツCTsの表示を開始させる。尚、S109にて、重畳位置VP2のミラー位置データ83が既に読み込まれている場合、S114は省略されてよい。
図33に示す表示制御処理のS31では、ヘッドアップECU70との情報共有により、HUD100にて設定される画角VAの位置を把握し、S32に進む。S32では、S31にて把握した情報に基づき、画角位置の切替作動の有無を把握する。S32にて、画角位置が維持されると判定した場合、現在の詳細情報PDiの表示又は非表示の状態が維持される。尚、起動後の最初の処理では、詳細情報PDiの表示を開始する処理が適宜実施されてよい。
S32にて、切替作動があると判定した場合、S33に進む。S33では、画角VAの移動方向を判定する。S33にて、通常位置VP1へ画角VAが移動されると判定した場合、S34に進む。S34では、HUD100にて重畳コンテンツCTsの表示がオフにされるのを待機し、重畳コンテンツCTsが非表示となったタイミングでS35に進む。S35では、詳細情報PDiの表示を開始する。以上により、画角VAが通常位置VP1にある期間において、詳細情報PDiがドライバによって随時確認できるように表示画面に表示される。
S33にて、重畳位置VP2へ画角VAが移動されると判定した場合、S36に進む。S36では、画角VAの移動開始を待機し、画角VAの移動が開始されたタイミングで、S37に進む。S37では、詳細情報PDiのトーンダウンを開始する。これにより、通常位置VP1から重畳位置VP2への画角VAの移動期間TM1において、詳細情報PDiの視認性を下げる様態変化が実施される。加えてS37では、トーンダウンの継続により、重畳位置VP2への画角移動が完了するタイミングで、詳細情報PDiを非表示の状態にする。
ここまで説明した第一実施形態によれば、特定コンテンツCTisに関連する関連コンテンツCTrが、通常位置VP1から重畳位置VP2への画角VAの移動完了前に表示される。故に、アクチュエータ63による画角VAの移動に起因した表示開始までのタイムラグは、ドライバ等の車両Aの乗員に知覚され難くなる。故に、アクチュエータ63を設けて虚像表示が可能な画角VAを拡張しても、表示の違和感が低減され得る。その結果、HUD100の利便性を高めることが可能になる。
特に、緊急性の高いシーンにおいて、重畳コンテンツCTsを用いた情報提示を行う場合、タイムラグの低減は、迅速な報知開始に不可欠となる。故に、関連コンテンツCTrを特定コンテンツCTisに対して早出しする処理は、虚像表示の利便性を効果的に向上させることができる。
加えて第一実施形態では、アクチュエータ63による画角VAの移動が開始される時刻t1(図4参照)よりも前に、関連コンテンツCTr(第一関連コンテンツCTr1)の表示が開始される。一例として、車線逸脱警告の実施に伴い、点滅背景CTBが画角VAの移動開始前に関連コンテンツCTrとして表示される。こうした関連コンテンツCTrは、画角位置の切り替えが決定された直後に表示を開始されるため、ドライバの知覚する表示の遅延感が低減され得る。その結果、ドライバは、車両側のシステムが正常に作動していると感じ易くなる。
また第一実施形態では、第一関連コンテンツCTr1とは異なる様態の第二関連コンテンツCTr2が、アクチュエータ63による画角VAの移動中(移動期間TM1,図4参照)に表示される。一例として、車線逸脱警告の実施に伴い、点滅背景CTBの表示終了後、移動中の画角VA内に誘導コンテンツCTGn,CTGsが第二関連コンテンツCTr2として表示される。異なる様態の第一関連コンテンツCTr1及び第二関連コンテンツCTr2が異なる画角位置で表示されることで、特定コンテンツCTisが表示される重畳位置VP2へ向けて、ドライバの視線が誘導され得る。その結果、ドライバによる特定コンテンツCTisの知覚が円滑となるので、利便性の高い虚像表示が実現される。
さらに第一実施形態では、アクチュエータ63による画角VAの移動中(移動期間TM1,図4参照)に、関連コンテンツCTrの表示が開始される。一例として、ACCステータスの変更通知の実施に伴い、移動中の画角VA内に部分表示コンテンツCTusが関連コンテンツCTrとして表示される。こうした関連コンテンツCTrは、重畳位置VP2にて表示される特定コンテンツCTisと連続的に視認されるため、ドライバの視線を緩やかに特定コンテンツCTisに誘導する作用を発揮し得る。以上によれば、ドライバによる特定コンテンツCTisの知覚が円滑となるので、利便性の高い虚像表示が実現される。
加えて第一実施形態では、通常位置VP1よりも上方に重畳位置VP2が規定されており、表示制御部73は、前景中の対象物に特定コンテンツCTisを重畳表示させる。こうしたHUD100の作動によれば、誘目性の高い重畳コンテンツCTsが、ドライバによって知覚され易い位置に適切なタイミングで表示され得る。故に、ドライバにとって分かり易くしつつ、且つ、煩わしく感じられ難い情報提示が可能になる。
一方で、通常位置VP1は、下方に配置されている。こうした通常位置VP1には、重畳コンテンツCTsが表示されないため、通常位置VP1での情報密度は、適切に抑制され得る。以上によれば、通常位置VP1に画角VAがある場合、煩わしく感じられ難い情報提示が実施される。
また第一実施形態では、車両Aの逸脱を警告する逸脱警告コンテンツCTdwを特定コンテンツCTisとして表示させる場合に、画角VAの移動に合わせてドライバの見た目上で移動する誘導コンテンツCTGnが関連コンテンツCTrとして表示される。こうした誘導コンテンツCTGnは、簡素な形状の虚像Viであっても、見た目上での移動でドライバの視線を重畳位置VP2に予め誘導し得る。その結果、逸脱警告コンテンツCTdwが知覚され易くなり、利便性の高い虚像表示が実現される。
さらに第一実施形態では、逸脱警告コンテンツCTdwを特定コンテンツCTisとして表示させる場合に、画角VAの移動期間TM1に消失点へ向けて移動する誘導コンテンツCTGsが関連コンテンツCTrとして表示される。こうした誘導コンテンツCTGsは、ドライバの視線を前景中の遠方に誘導し得る。その結果、重畳位置VP2で表示される逸脱警告コンテンツCTdwの視認が円滑に実施される。したがって、利便性の高い虚像表示が可能になる。
加えて第一実施形態では、車間通知コンテンツCTfdを特定コンテンツCTisとして表示させる場合に、車間通知コンテンツCTfdの一部である部分表示コンテンツCTusが関連コンテンツCTrとして移動期間TM1の画角VA内に表示される。部分表示コンテンツCTusは、画角VAの移動完了前に車間通知コンテンツCTfdの表示を開始させるような視覚効果を発揮し得る。その結果、車間維持制御の設定値を変更してから、車間通知コンテンツCTfdの表示開始までのタイムラグが低減される。こうして、ドライバが感じる表示システム110のレスポンスを高めれば、車両Aのシステムが適切に反応していることを、ドライバが実感し易くなる。
また第一実施形態では、経路案内を行う経路案内コンテンツCTrgを特定コンテンツCTisとして表示させる場合に、走行中の自車車線を強調するレーン強調コンテンツCTelが関連コンテンツCTrとして表示される。こうしたレーン強調コンテンツCTelは、経路案内コンテンツCTrgと連携して、自車の将来の移動軌跡を予告できる。その結果、拡張された画角VAを利用した分かり易い経路案内が実施され得るため、虚像表示の利便性がいっそう向上する。
さらに第一実施形態による表示システム110によれば、アクチュエータ63による画角VAの位置の切り替えに連携させて、メータ表示装置30が表示画面の表示を変更する。こうした虚像表示と画面表示との連携によれば、ドライバによる情報取得を容易にしつつ、ドライバの視線を適切に前景中に向けさせることができる。したがって、利便性の高い情報提示が実現される。
加えて第一実施形態では、画角VAが通常位置VP1にある期間において、特定コンテンツCTisに関連する詳細情報PDiが表示画面に表示される。そして、重畳位置VP2への画角VAの移動が完了すると、詳細情報PDiは非表示となる。このように、詳細情報PDiが一時的に非表示とされれば、詳細情報PDiによるドライバの誘目により、重畳位置VP2に表示させたコンテンツ及び前方状況の把握を妨げる事態は、生じ難くなる。したがって、ドライバの利便性がいっそう確保され易くなる。
また第一実施形態では、画角VAが通常位置VP1から重畳位置VP2に移動する移動期間TM1において、詳細情報PDiの視認性を下げる様態変化が実施される。これにより、詳細情報PDiにドライバの注意が向けられていても、視認性を下げる様態変化により、ドライバの視線は、詳細情報PDiから自然に外されて、虚像表示に誘導され得る。その結果、適切なタイミングでドライバに前方状況の把握を促すことが可能になる。
尚、第一実施形態において、誘導コンテンツCTGn,CTGsが「移動コンテンツ」に相当し、部分表示コンテンツCTusが「(車間通知コンテンツの)一部」に相当し、通常位置VP1が「第一位置」に相当し、重畳位置VP2が「第二位置」に相当する。メータ表示装置30が「画面表示装置」に相当し、アクチュエータ63が「切替機構」に相当し、HUD100が「虚像表示装置」に相当する。
(第二実施形態)
図34及び図35に示す本開示の第二実施形態は、第一実施形態の変形例である。第二実施形態の表示システム210は、メータ表示装置30及びHUD200等によって構成されている。第二実施形態のメータ表示装置30からは、虚像表示に用いる画像データをHUD200に出力する機能が省略されている。虚像表示に用いられる画像データは、ヘッドアップECU70によって全て生成される。
HUD200は、投影ユニット260、ミラーアクチュエータ263及びユニットアクチュエータ264を備えている。投影ユニット260は、PGU61及び拡大光学系62を一体的に含む構成である。投影ユニット260は、虚像光Lvi(図1参照)の射出方向を上下に移動可能な状態で、HUD200の筐体に支持されている。
ミラーアクチュエータ263及びユニットアクチュエータ264は、第一実施形態のアクチュエータ63(図2参照)に相当する構成であり、ウィンドシールドWSのうちで投影範囲PA(図1参照)となる領域を機械的に移動させる機構である。ミラーアクチュエータ263は、投影ユニット260に組み込まれた機構であり、拡大光学系62の凹面鏡に規定された回転軸まわりに凹面鏡を回動させる。ユニットアクチュエータ264は、投影ユニット260に規定された回転軸まわりに、投影ユニット260の全体をHUD200の筐体に対し回動させる。ミラーアクチュエータ263及びユニットアクチュエータ264は、互いに連携し、拡大光学系62からウィンドシールドWSへ向かう虚像光Lviの射出方向を変化させる。
HUD200は、投影ユニット260及び投影ユニット260内の拡大光学系62の姿勢変化により、画角VAの位置を三つのうちで切り替える。HUD200は、第一実施形態と実質同一の通常位置VP1及び重畳位置VP2に加えて、重畳位置VP2よりも上方に規定された遠方位置VP3に画角VAを移動できる。第二実施形態でも、通常位置VP1、重畳位置VP2及び遠方位置VP3は、ドライバによるユーザ操作により、ドライバの体型等に合わせて調整可能であってよい。
通常位置VP1には、非重畳コンテンツCTnが主に表示される。一例として、スピードメータCTv及び標識アイコンCTrsが通常位置VP1に表示される。通常位置VP1には、実質的に重畳コンテンツCTsは表示されない。一方、重畳位置VP2及び遠方位置VP3には、重畳コンテンツCTsが主に表示される。一例として、重畳位置VP2及び遠方位置VP3には、レーン強調コンテンツCTel及び経路案内コンテンツCTrg等が表示される。特に、遠方位置VP3には、例えば地点通知画像Ptpが重畳表示される。
ヘッドアップECU70は、通常位置VP1から重畳位置VP2又は遠方位置VP3に画角VAを移動させる場合、第一実施形態と同様に、特定コンテンツCTisに予め関連付けられた関連コンテンツCTrを表示させる(図21及び図23参照)。加えて、重畳位置VP2から遠方位置VP3に移動させる場合にも、ヘッドアップECU70は、関連コンテンツCTrを表示させることができる。
以上により、第二実施形態でも、第一実施形態と同様の効果を奏し、各アクチュエータ263,264による画角移動に起因した表示開始までのタイムラグは、ドライバに知覚され難くなる。故に、虚像表示が可能な画角VAを拡張しても、表示の違和感が低減されるので、HUD200の利便性を高めることが可能になる。
加えて第二実施形態のHUD200は、通常位置VP1及び重畳位置VP2に加えて、遠方位置VP3にも画角VAを移動させることができる。以上によれば、虚像表示可能な範囲がいっそう拡大できるため、HUD200の利便性は、さらに向上し得る。尚、第二実施形態では、ミラーアクチュエータ263及びユニットアクチュエータ264が「切替機構」に相当し、HUD200が「虚像表示装置」に相当する。
(第三実施形態)
図36~図50に示す本開示の第三実施形態は、第一実施形態の別の変形例である。第三実施形態では、HUD100及びメータ表示装置30の接続される車載ネットワークの通信バスに、カメラECU21、ナビゲーションECU22及び運転支援ECU23等に加えて、レーダECU24及び車載通信機25がさらに接続されている。
レーダECU24は、レーダユニットに含まれる信号処理回路を主体とした回路装置であり、ミリ波又は準ミリ波を送受信するアンテナと電気的に接続されている。レーダユニットは、車載カメラ(フロントカメラ)と同様に、自車前方を検出範囲とする配置及び姿勢にて、車両A(図1参照)に搭載されている。レーダECU24は、自車前方に射出したミリ波又は準ミリ波の反射波を受信することにより、自車前方に存在する物標の相対位置(距離及び方向)及び相対速度を検出する。レーダECU24は、検出した物標の相対位置及び相対速度を示す情報を、前方物標の検出情報として運転支援ECU23に提供する。尚、車両Aには、複数のレーダユニットが、自車の前側方、後方及び後側方を検出範囲とする姿勢で搭載されていてもよい。さらに、カメラ及びミリ波レーダ等とは別の自律センサ、例えば、ライダ及びソナー等が、車両Aに搭載されていてもよい。
車載通信機25は、車両Aに搭載された車外通信ユニットであり、V2X(Vehicle to Everything)通信機として機能する。車載通信機25は、道路脇に設置された路側機との間で無線通信によって情報を送受信する。車載通信機25は、交差点に設置された路側機から、交差点に進入する移動物標の位置及び移動速度等を示す物標情報を受信する。具体的には、交差点に進入する車両、モーターサイクル、サイクリスト及び歩行者等に関する物標情報が、車載通信機25によって受信される。車載通信機25は、受信した物標情報を運転支援ECU23に提供する。
車載通信機25は、路上駐車可能な道路の道路脇に設置された路側機、又は施設(例えば、ショッピングモール等)の駐車場に設置された路側機から、空き状態にある駐車スペースPkSの位置情報(以下、駐車スペース情報)を受信する。駐車スペースPkSの利用が特定の管理センタによって管理されている場合、車載通信機25は、ナビゲーションECU22と連携して、駐車スペースPkSを予約可能であってもよい。車載通信機25は、路側機からの受信する駐車スペース情報を、ナビゲーションECU22及び運転支援ECU23に提供する。
次に、第三実施形態の表示システム110によって表示される特定コンテンツCTis及び関連コンテンツCTrの詳細を説明する。表示システム110は、第一実施形態と同様の車線逸脱警告、ACCステータスの変更通知及びターンバイターン表示等に加えて、前方物標警告、駐車スペース案内、狭路走行支援表示、及び視界支援表示等を実施可能である。以下、通常位置VP1から重畳位置VP2へ画角VAを移動させて、特定コンテンツCTisを表示させる複数のシーンを、図37~図50に基づき、図36及び図1を参照しつつ説明する。
<前方物標警告>
図37及び図38に示す前方物標警告では、車両Aに接近する前方のリスク物標Trの存在がドライバに警告される。警告対象となるリスク物標Trは、運転支援ECU23によって認識される他車両、モーターサイクル、サイクリスト及び歩行者等である。前方物標警告は、運転支援ECU23によるリスク物標Trの検出に基づき実施される。
運転支援ECU23は、カメラECU21及びレーダECU24から取得する検出情報と、車載通信機25を通じて取得する物標情報等とに基づき、自車前方の移動物標を認識する。運転支援ECU23は、認識した移動物標のうちで、車両A(自車)に接近する移動物標であって、予測される予想移動軌跡が自車の予想移動軌跡と交差する移動物標を、リスク物標Trとして検出する。運転支援ECU23は、リスク物標Trを検出した場合、リスク物標Trが検出されたことと、リスク物標Trの相対位置とを示すリスク物標情報を、ヘッドアップECU70及びメータECU32に提供する。尚、運転支援ECU23は、複数のリスク物標Trを検出した場合、各リスク物標Trについてのリスク物標情報を提供可能であってよい。
表示制御部73は、前方物標警告が開始される以前において、通常位置VP1にある画角VAに、非重畳コンテンツCTnであるスピードメータCTvを表示させている(図5上段参照)。表示制御部73は、情報取得部71によるリスク物標情報の取得をトリガとして、前方物標警告の実施を決定する。
表示制御部73は、前景物標警告の実施を決定すると、スピードメータCTvの表示を継続しつつ、警告画像Pai及び方向提示画像Ptdを表示させる(図37上段参照)。警告画像Pai及び方向提示画像Ptdは、スピードメータCTvと左右方向に並ぶ配置にて、画角VAの下縁寄りに表示される非重畳コンテンツCTnである。警告画像Pai及び方向提示画像Ptdは、前方物標警告における関連コンテンツCTrとして表示される。
警告画像Paiは、例えば黄色等の警告色で虚像表示される。警告画像Paiは、リスク物標Trがセンシングされたことをドライバに通知し、ドライバに気づきを与えるための画像である。警告画像Paiは、エクスクラメーションマークを主体とした画像とされる。運転支援ECU23にてリスク物標Trの種別が特定されない場合、警告画像Paiは、リスク物標Trの種別を想起させない様態とされるのが望ましい。尚、運転支援ECU23がリスク物標Trの種別を高精度に判別可能である場合、警告画像Paiの様態は、リスク物標Trの種別を示す様態に適宜変更されてよい。
方向提示画像Ptdは、警告画像Paiと実質同一の表示色(例えば、黄色等)で虚像表示される。方向提示画像Ptdは、警告画像Paiと組み合わされることにより、リスク物標Trが接近している方向と、リスク物標Trの移動方向とを通知する。リスク物標Trが自車の右前方から接近している場合、方向提示画像Ptdは、左方向を指し示すV字形状に描画され、警告画像Paiの右側に表示される。一方、リスク物標Trが自車の左前方から接近している場合、方向提示画像Ptdは、右方向を指し示すV字形状に描画され、警告画像Paiの左側に表示される。
表示制御部73は、時刻t1(図4参照)にて画角VAの移動を開始させる以前に、スピードメータCTvの表示を終了させる。表示制御部73は、画角VAの移動を開始させると、既に表示していた警告画像Pai及び方向提示画像Ptdを、誘導コンテンツCTGtとして利用する(図37下段参照)。誘導コンテンツCTGtは、画角VAの移動中(移動期間TM1,図4参照)において、前景中のリスク物標Trへ向けて移動することにより、ドライバの視線をリスク物標Trに誘導する。こうした誘導コンテンツCTGtは、非重畳コンテンツCTnであってもよく、重畳コンテンツCTsであってもよい。
表示制御部73は、画角VAの上方向への移動に合わせて、画角VAの中央側へ向けて誘導コンテンツCTGtの表示サイズを縮小する。これにより、誘導コンテンツCTGtの中心は、画角VAの上方向への移動に合わせて、画角VAの中央側へ向けて僅かに移動する。表示制御部73は、重畳位置VP2への画角VAの移動が完了する以前に、誘導コンテンツCTGtを非表示とする。以上により、前景中の消失点へ向けて移動した、その後に消失する誘導コンテンツCTGtが表示される。
ここで、表示制御部73は、リスク物標Trの左右の方向に応じて、移動期間TM1における誘導コンテンツCTGtの移動方向を変更させてもよい。例えば、リスク物標Trが自車の右前方から接近している場合、表示制御部73は、誘導コンテンツCTGtの表示位置を、移動期間TM1にて画角VAの右方向にシフトさせる。一方、リスク物標Trが自車の左前方から接近している場合、表示制御部73は、誘導コンテンツCTGtの表示位置を、移動期間TM1にて画角VAの左方向にシフトさせる。以上によれば、誘導コンテンツCTGtは、ドライバの視線を精度良くリスク物標Trへ向けて誘導できるようになる。
表示制御部73は、時刻t2(図4参照)にて重畳位置VP2への画角VAの移動を完了すると、物標警告コンテンツCTtaの表示を開始させる(図38上段参照)。物標警告コンテンツCTtaは、前方物標警告における特定コンテンツCTisである。物標警告コンテンツCTtaは、前景中のリスク物標Trを重畳の対象物とする重畳コンテンツCTsであり、車両Aの前方に発生したリスク物標Trを警告する。物標警告コンテンツCTtaは、ドライバの見た目上において、重畳対象であるリスク物標Trを隠さないように、リスク物標Trから一定の距離だけ離れた位置に重畳表示される。
物標警告コンテンツCTtaは、ベース矢印画像Pta1及び強調矢印画像Pta2を用いたアニメーション表示である(図38下段参照)。ベース矢印画像Pta1及び強調矢印画像Pta2は、方向提示画像Ptd(図37参照)と同様に、リスク物標Trの移動方向を指し示すV字形状の画像であり、前景中のリスク物標Trの下側に重畳にされる。ベース矢印画像Pta1は、例えば白色等で虚像表示される。強調矢印画像Pta2は、ベース矢印画像Pta1よりも誘目性の高い黄色及びアンバー等の警告色で虚像表示される。強調矢印画像Pta2は、リスク物標Trの移動方向に合わせて、ベース矢印画像Pta1へ向けた移動を繰り返す。
表示制御部73は、リスク物標Trが自車の右前方から接近している場合、左方向を指し示すベース矢印画像Pta1及び強調矢印画像Pta2を、画角VA内の右縁近傍に表示する(図38下段参照)。表示制御部73は、ベース矢印画像Pta1の右側に表示させた強調矢印画像Pta2を、左方向に繰り返し流すアニメーションを再生する。一方、リスク物標Trが自車の左前方から接近している場合、表示制御部73は、右方向を指し示すベース矢印画像Pta1及び強調矢印画像Pta2を、画角VA内の左縁近傍に表示する。表示制御部73は、ベース矢印画像Pta1の左側に表示させた強調矢印画像Pta2を、右方向に繰り返し流すアニメーションを再生する。
表示制御部73は、リスク物標Trが画角VAの概ね中央に到達するタイミングで、ドライバによるリスク物標Trの直接的な視認を妨げないように、物標警告コンテンツCTtaの表示を終了する。表示制御部73は、物標警告コンテンツCTtaを非表示とした後、画角VAを重畳位置VP2から通常位置VP1へと移動させる。以上により、前方物標警告は終了となる。
<駐車スペース案内>
図39~図42に示す駐車スペース案内では、空き状態にある駐車スペースPkS(図42参照)がドライバに案内される。駐車スペース案内は、例えばナビゲーションECU22による経路案内の一部として実施される。ナビゲーションECU22は、目的地及び経路の設定時に、目的地付近の駐車スペースPkSの予約を行うか否かについてドライバに問い合わせる。ナビゲーションECU22は、駐車スペースPkSの予約を指示するユーザ操作に基づき、経路案内の最後において駐車スペース案内の実施を決定する。
ナビゲーションECU22は、車載通信機25を通じて取得する駐車スペース情報に基づき、車両Aを駐車させる駐車スペースPkSの位置を特定する。ナビゲーションECU22は、特定した駐車スペースPkSまでの残距離が所定の案内開始距離(例えば、100m程度)未満となったタイミングで、駐車スペース案内の開始をヘッドアップECU70及びメータECU32に要求する。駐車スペース案内において、空き状態にある駐車スペースPkSの位置の正確な把握は、カメラECU21又はレーダECU24の検出情報を取得する運転支援ECU23によって支援されてもよい。
表示制御部73は、情報取得部71による駐車スペース案内の実施要求の取得をトリガに、駐車案内コンテンツCTpnの表示を開始させる(図39上段参照)。駐車案内コンテンツCTpnは、スピードメータCTvと共に、通常位置VP1にある画角VA内に表示される。駐車案内コンテンツCTpnは、非重畳コンテンツCTnであり、残距離画像Prd、料金画像Ppp及び方向案内画像Ppdを含んでいる。
残距離画像Prdは、駐車スペースPkSまでの残距離を示す画像である。料金画像Pppは、駐車スペースPkSを利用するための料金を通知する画像である。料金画像Pppによって提示される駐車料金の情報は、駐車スペース情報に含まれていてもよく、ナビゲーションECU22が参照する地図データベースに予め記憶されていてもよい。方向案内画像Ppdは、駐車スペースPkSが自車の左右どちら側に存在するのかを示す画像である。方向案内画像Ppdには、「P」の文字を含むパーキングアイコンPpiが含まれている。パーキングアイコンPpiは、ドライバから見て奥側に傾斜した姿勢に描画され、前方路面に貼り付いているような様態で表示される。
表示制御部73は、駐車スペースPkSまでの残距離が所定の接近距離(例えば、30m程度)未満となるまで駐車案内コンテンツCTpnの表示を継続する。表示制御部73は、残距離が接近距離未満となったタイミングで、接近通知コンテンツCTanの表示を開始させる(図39下段参照)。接近通知コンテンツCTanは、駐車スペース案内における関連コンテンツCTrとして表示され、駐車スペースPkSの接近を通知する。表示制御部73は、パーキングアイコンPpiを路面に対して垂直な姿勢に起こすアニメーションを、接近通知コンテンツCTanとして表示する。
表示制御部73は、接近通知コンテンツCTanの表示開始に合わせて、パーキングアイコンPpiを除く駐車案内コンテンツCTpnの各画像と、スピードメータCTvとをトーンダウンさせる。表示制御部73は、駐車案内コンテンツCTpnの各画像及びスピードメータCTvをトーンダウンによって非表示とし、パーキングアイコンPpiのみを表示させる(図40参照)。パーキングアイコンPpiは、一旦強く発光した後、駐車スペースPkSの方向に向けて消失する。
表示制御部73は、パーキングアイコンPpiを非表示とした後、通常位置VP1から重畳位置VP2への画角VAの移動を開始する。表示制御部73は、重畳位置VP2への画角VAの移動を完了させた後、駐車案内コンテンツCTpsの表示を開始させる(図41上段参照)。駐車案内コンテンツCTpsは、駐車スペース案内における特定コンテンツCTisであり、前方路面を重畳の対象物とする重畳コンテンツCTsである。
駐車案内コンテンツCTpsは、パーキングアイコンPpi及び方向案内画像Ppd1,Ppd2を含んでいる。パーキングアイコンPpiは、駐車スペースPkSの方向から画角VA内にフェードインし、画角VA内に再表示される。パーキングアイコンPpiは、画角VA内の左右両縁近傍のうちで、駐車スペースPkSの存在する側に表示される。パーキングアイコンPpiは、地面に対して立設された看板のような様態で表示される。
方向案内画像Ppd1は、パーキングアイコンPpiと左右方向に並ぶ配置にて、画角VAの概ね中央に表示される。方向案内画像Ppd1は、パーキングアイコンPpiの方向を指し示す複数(3つ)の三角形状の画像部を含んでいる。方向案内画像Ppd1は、パーキングアイコンPpiと共に表示を開始され、駐車スペースPkSの接近に合わせて、パーキングアイコンPpiと共に画角VA内を下方向に移動する。
方向案内画像Ppd2は、駐車スペースPkSの一部が画角VA内に入るタイミングで表示を開始される(図41下段参照)。方向案内画像Ppd2は、方向案内画像Ppd1よりも奥側に知覚されるように、方向案内画像Ppd1の上側に表示される。方向案内画像Ppd2は、方向案内画像Ppd1と同様に、複数(3つ)の三角形状の画像部を含んでおり、駐車スペースPkSの方向を指し示している。
表示制御部73は、車両Aの走行に合わせて方向案内画像Ppd2を下方に移動させる。その結果、方向案内画像Ppd2の各画像部は、方向案内画像Ppd1の各画像部に順に衝突する(図42上段参照)。方向案内画像Ppd1,Ppd2は、互いに衝突した画像部を順に発光及び消失させ、非表示となる。以上により、駐車案内コンテンツCTpsとして、パーキングアイコンPpiのみが表示された状態となる。
表示制御部73は、駐車案内コンテンツCTps(特定コンテンツCTis)の表示を継続しつつ、重畳位置VP2から通常位置VP1への画角VAの移動を開始する。表示制御部73は、車両Aの走行に合わせて、言い替えれば、ドライバの見た目上における駐車スペースPkSの接近に合わせて、画角VAを下方向に移動させる。その結果、パーキングアイコンPpiは、駐車スペースPkSの近傍に重畳され続ける。表示制御部73は、車両Aが駐車スペースPkSへ進入するタイミングで、パーキングアイコンPpiを地面に埋もれた様態に変化させ(図42下段参照)、目的地としていた駐車スペースPkSに到着したことをドライバに通知する。表示制御部73は、車両Aの駐車スペースPkSへの到着後、駐車スペースPkSが画角VA外となるタイミングで、パーキングアイコンPpiを非表示とする。以上により、駐車スペース案内は終了となる。
<狭路走行支援表示>
図43~図46に示す狭路走行支援表示は、車両Aが狭路を走行する狭路走行のシーンにて実施され、ドライバのステアリング操作を支援する。狭路は、車両Aの全幅よりも僅かに広い走行スペースPaS(図43参照)である。狭路は、道幅の狭い道路であってもよく、路上駐車車両と路肩との間に生じた走行可能な領域であってもよい。運転支援ECU23は、カメラECU21又はレーダECU24の検出情報に基づき、自車前方の走行スペースPaSが狭路に相当するか否かを診断する。運転支援ECU23は、自車前方が狭路であると診断した場合、狭路走行支援表示の実施を決定し、狭路走行支援表示の開始をヘッドアップECU70及びメータECU32等に要求する。
尚、狭路と診断する走行スペースPaSの道幅は、ドライバの運転技量に応じて自動的に変更されてもよい。運転支援ECU23は、運転技量の高いドライバほど、狭路走行支援表示の実施を決定する道幅を狭くする。加えて運転支援ECU23は、ドライバによって入力されるユーザ操作に基づき、狭路走行支援表示の実施を決定してもよい。また運転支援ECU23は、自車前方の道幅が自車の車幅と同程度又は車幅よりも狭い場合、即ち、自車の通過が実質的に不可能と診断した場合、狭路走行支援表示を実施しない。
表示制御部73は、情報取得部71による狭路走行支援表示の実施要求の取得をトリガに、誘導コンテンツCTGpの表示を開始させる。誘導コンテンツCTGpは、狭路走行支援表示における関連コンテンツCTrである。表示制御部73は、誘導コンテンツCTGpとして、狭路通知画像Pnn及び狭路強調画像Penを順に表示させる。
狭路通知画像Pnnは、通常位置VP1の画角VA内にスピードメータCTvと並ぶ配置にて、第一関連コンテンツCTr1として表示される(図43参照)。狭路通知画像Pnnは、表示形状及び画角VA内における表示位置が予め規定された非重畳コンテンツCTnである。狭路通知画像Pnnは、自車前方に狭路が存在していることをドライバに通知すると共に、前方の狭路を車両Aが通過可能であることをドライバに示す。
表示制御部73は、時刻t1(図4参照)にて画角VAの移動を開始させる以前に、狭路通知画像Pnn及びスピードメータCTvを非表示としたうえで、狭路強調画像Penを第二関連コンテンツCTr2として表示させる(図44上段参照)。狭路強調画像Penは、狭路通知画像Pnnとは異なる様態の関連コンテンツCTrである。表示制御部73は、通常位置VP1から重畳位置VP2への画角VAの移動が開始される以前に狭路強調画像Penの表示を開始させ、重畳位置VP2への画角VAの移動の完了後まで狭路強調画像Penの表示を継続する。
表示制御部73は、画角VAが通常位置VP1にあるうちに、画角VA内の下縁に接しつつ左右方向に延伸する横長形状の狭路強調画像Penを表示させる(図44上段参照)。狭路強調画像Penは、自車前方の路面に重畳される重畳コンテンツCTsである。狭路強調画像Penの左右方向の長さは、自車前方の走行スペースPaSの道幅に合わせて調整される。
表示制御部73は、上方向への画角VAの移動(移動期間TM1,図4参照)に合わせて、狭路強調画像Penを上下方向に拡大させる(図44中段参照)。その結果、狭路強調画像Penは、ドライバから見て奥側に傾斜した姿勢の台形形状に描画され、前方路面に貼り付いているような様態で表示される。狭路強調画像Penは、誘導コンテンツCTGpとして前景中の走行スペースPaSへ向けて移動することにより、ドライバの視線を走行スペースPaSに誘導する。狭路強調画像Penは、重畳位置VP2への画角VAの移動が完了する時刻t2(図4参照)にて、走行スペースPaSに重畳され、走行スペースPaSの全体を覆うような様態となる(図44下段参照)。
表示制御部73は、重畳位置VP2への画角VAの移動を完了させた後、狭路強調画像Pen(誘導コンテンツCTGp)の表示を終了し、狭路走行支援コンテンツCTnrの表示を開始させる(図45上段参照)。狭路走行支援コンテンツCTnrは、狭路走行支援表示における特定コンテンツCTisであり、狭路強調画像Penと同様に走行スペースPaSを重畳の対象物とする重畳コンテンツCTsである。表示制御部73は、重畳位置VP2にある画角VA内に、左境界画像Pnl及び右境界画像Pnrを、狭路走行支援コンテンツCTnrとして表示させる。
左境界画像Pnlは、走行スペースPaSの左側の境界に重畳される線状の画像である。右境界画像Pnrは、走行スペースPaSの右側の境界に重畳される線状の画像である。左境界画像Pnl及び右境界画像Pnrは、走行スペースPaSとなる路面範囲をドライバに示している。表示制御部73は、自車がこのまま直進したと仮定した場合に、走行スペースPaSの各境界と車両Aとの間に確保される横方向の間隔の広さに応じて、左境界画像Pnl及び右境界画像Pnrの表示色を変化させる。具体的に、表示制御部73は、境界と車両Aとの間隔が確保されている場合、左境界画像Pnl及び右境界画像Pnrを白色又は青色等で表示させる。一方、境界と車両Aとの間隔が十分でなく、一定値を下回る場合、表示制御部73は、左境界画像Pnl及び右境界画像Pnrを黄色又はアンバー等で表示させる。
表示制御部73は、車両Aが走行スペースPaSに接近すると、狭路走行支援コンテンツCTnr(特定コンテンツCTis)の表示を継続しつつ、重畳位置VP2から通常位置VP1への画角VAの移動を開始する。表示制御部73は、車両Aの走行に合わせて、言い替えれば、ドライバの見た目上における走行スペースPaSの接近に合わせて、画角VAを下方向に移動させる。表示制御部73は、下方向への画角VAの移動中(移動期間TM2,図4参照)に、自車位置画像Pmfを狭路走行支援コンテンツCTnrに追加する(図45下段参照)。
自車位置画像Pmfは、車両Aの将来位置を示す画像である。自車位置画像Pmfは、車両Aのフロントバンパーを想起させるような横長形状であり、自車の車幅に対応した表示幅にて画角VA内の下縁近傍に表示される。自車位置画像Pmfは、左境界画像Pnl及び右境界画像Pnrの間に表示されることで、走行スペースPaSの横幅と自車幅との比率を視覚化して示す。自車位置画像Pmfは、ドライバのステアリング操作に応じて、左境界画像Pnl及び右境界画像Pnrの間を左右に移動する。車両Aの走行位置が走行スペースPaSの左側に寄り過ぎている場合、自車位置画像Pmfの左端部分と左境界画像Pnlとが警告色に変わることで、右方向へのステアリング操作がドライバに促される。一方、車両Aの走行位置が走行スペースPaSの右側に寄り過ぎている場合、自車位置画像Pmfの右端部分と右境界画像Pnrとが警告色に変わることで、左方向へのステアリング操作がドライバに促される。以上の表示変化により、狭路走行支援コンテンツCTnrは、ドライバの狭路走行を支援する。
表示制御部73は、通常位置VP1への画角VAの移動が完了する時刻t4(図4参照)以降も狭路走行支援コンテンツCTnrの表示を継続する(図46参照)。これにより、車両Aが走行スペースPaSを走行する期間でも、狭路走行支援コンテンツCTnrによる狭路走行の支援が継続される。表示制御部73は、車両Aが走行スペースPaSを通過し、ドライバの見た目上で走行スペースPaSが画角VA外となったタイミングで、狭路走行支援コンテンツCTnrを非表示とする。以上により、狭路走行支援表示は終了となる。
<視界支援表示>
図47~図50に示す視界支援表示は、例えば霧や豪雨等の視界不良の環境下にて実施され、車両Aの前方に存在するカーブ区間CuS(図49参照)の走行を支援する。運転支援ECU23は、カメラECU21の検出情報に基づき、自車前方の視界不良を判断する。運転支援ECU23は、自車前方が視界不良であと判定した場合、車両Aの走行速度が閾値(例えば、30km/h)を超えているか否かと、自車前方にカーブ区間CuSが存在するか否かと、をさらに判定する。自車前方の道路形状を示す情報(地図データ)は、車載通信機25を通じて車外ネットワークから取得してもよく、又はナビゲーションECU22から取得してもよい。運転支援ECU23は、視界不良の環境下、閾値を超えた速度で走行する車両Aがカーブ区間CuSに接近すると、視界支援表示の実施を決定し、視界支援表示の開始をヘッドアップECU70及びメータECU32等に要求する。運転支援ECU23は、カメラECU21の検出情報に基づき、一定の距離が見通せる状況になったと診断すると、視界支援表示の終了をヘッドアップECU70及びメータECU32等に通知する。
表示制御部73は、情報取得部71による視界支援表示の実施要求の取得をトリガに、カーブ通知画像Pncの表示を開始させる(図47参照)。カーブ通知画像Pncは、スピードメータCTvと左右方向に並ぶ配置にて、画角VAの下縁寄りに表示される非重畳コンテンツCTnである。カーブ通知画像Pncは、視界支援表示における関連コンテンツCTrとして表示される。カーブ通知画像Pncは、例えば黄色等の警告色で虚像表示される。カーブ通知画像Pncは、自車前方に曲率の大きなカーブ区間CuSが接近していることをドライバに注意喚起する。カーブ通知画像Pncは、カーブを想起させるように、湾曲又は屈曲した矢印を主体した画像とされる。
表示制御部73は、時刻t1(図4参照)にて画角VAの移動を開始させる以前に、スピードメータCTvに替えて、視線誘導画像Pggを画角VAの中央部分に表示させる(図48上段参照)。視線誘導画像Pggは、複数の発光スポットを含む画像である。複数の発光スポットは、例えば白色又は青色等で虚像表示される。各発光スポットは、互いに間隔を空けつつ、走行中の自車車線に沿って概ね直線状に並ぶように表示される。視線誘導画像Pggは、画角VA内の表示位置が予め設定された非重畳コンテンツCTnであってもよく、自車前方の道路形状に応じて並ぶ方向が変化する重畳コンテンツCTsであってもよい。
表示制御部73は、カーブ通知画像Pnc及び視線誘導画像Pggを、誘導コンテンツCTGfとして利用する。誘導コンテンツCTGfは、画角VAの移動中(移動期間TM1,図4参照)において、前景中の消失点へ向けて移動することにより、ドライバの視線を遠方に向けるための表示物である。誘導コンテンツCTGfは、ドライバの注意をカーブ区間CuSの存在する前方範囲へ誘導する。
表示制御部73は、画角VAの上方向への移動に合わせて、カーブ通知画像Pncの表示サイズを縮小する。表示制御部73は、画角VAの移動期間TM1(図4参照)の途中にて、カーブ通知画像Pncの表示を終了させる(図48下段参照)。以上により、カーブ通知画像Pncは、前景中の消失点へ向けて移動し、消失するように表示される。
表示制御部73は、画角VAの上方向への移動に合わせて、視線誘導画像Pggの発光スポットの数を増加させる。表示制御部73は、上方向に表示される発光スポットほど、表示サイズを小さくする。表示制御部73は、カーブ通知画像Pncを非表示とした後も視線誘導画像Pggの表示を継続し(図48下段参照)、ドライバの注意を遠方に誘導する。
表示制御部73は、時刻t2(図4参照)にて重畳位置VP2への画角VAの移動を完了するまで、視線誘導画像Pggを表示させ続ける。表示制御部73は、視線誘導画像Pggの複数の発光スポットを左右に分裂させるアニメーション表示により、カーブ案内コンテンツCTcsの表示を開始させる(図49上段参照)。カーブ案内コンテンツCTcsは、視界支援表示における特定コンテンツCTisである。カーブ案内コンテンツCTcsは、前景中の自車車線の路面を重畳の対象物とする重畳コンテンツCTsであり、路面に重畳されることで前方の道路形状をドライバに示す。
カーブ案内コンテンツCTcsは、カーブ形状画像Pcs及び対向車通知画像Pocを含む重畳コンテンツCTsである。カーブ形状画像Pcsは、左右に分裂した複数の発光スポットによって構成される画像である。カーブ形状画像Pcsは、前方路面に沿って並ぶ左右2列の発光スポット群を有しており、自車前方の道路形状をドライバに案内する。対向車通知画像Pocは、運転支援ECU23によって対向車線を走行する対向車両Ao(図49参照)が検出された場合に表示される。対向車通知画像Pocは、前方から接近する対向車両Aoの存在をドライバに注意喚起する画像であり、例えば黄色等の警告色で虚像表示される。対向車通知画像Pocは、カーブ形状画像Pcsに対して対向車線側に表示される。対向車通知画像Pocは、前方路面に対して垂直な姿勢に視認される複数のV字形状の画像部を有しており、対向車線への自車の逸脱を防止する。対向車通知画像Pocの表示は、対向車両Aoが車両Aの側方を通過することによって終了される(図50上段参照)。
表示制御部73は、情報取得部71による視界支援表示の終了通知の取得をトリガに、実際の前景の視認を妨げないように、カーブ案内コンテンツCTcsの表示を終了させる。表示制御部73は、通常位置VP1への画角VAの移動を開始する時刻t3(図4参照)以前に、カーブ形状画像Pcsとして表示していた2列の発光スポット群を、画角VAを中央に移動させる(図50中段参照)。表示制御部73は、左右の発光スポットを合体させ、1列の表示とした後に、通常位置VP1への画角VAの移動を開始する。画角VAの下方向への移動に伴って各発光スポットが画角VA外となることで、視界支援表示は終了となる(図50下段参照)。
ここまで説明した第三実施形態でも、第一実施形態と同様の効果を奏し、画角移動に起因した表示開始までのタイムラグは、関連コンテンツCTrの表示によってドライバに知覚され難くなる。故に、虚像表示が可能な画角VAを拡張しても、表示の違和感が低減されるので、HUD100の利便性を高めることが可能になる。
加えて第三実施形態では、自車前方のリスク物標Trを警告する物標警告コンテンツCTtaを特定コンテンツCTisとして表示させる場合に、リスク物標Trへ向けて移動する誘導コンテンツCTGtが関連コンテンツCTrとして表示される。こうした誘導コンテンツCTGtは、ドライバの注意をリスク物標Tr又はその近傍に早期に向けさせることができる。その結果、ドライバは、リスク物標Trの認識が容易となり、リスク物標Trへの対応を円滑に実施し得る。したがって、利便性の高い虚像表示が実現される。
また第三実施形態では、自車前方の駐車スペースPkSを案内する駐車案内コンテンツCTpsを特定コンテンツCTisとして表示させる場合に、駐車スペースPkSの接近を通知する接近通知コンテンツCTanが関連コンテンツCTrとして表示される。こうした接近通知コンテンツCTanは、駐車スペースPkSに駐車するための減速等の運転操作をドライバに促し得る。その結果、ドライバは、駐車案内コンテンツCTpsに従って駐車スペースPkSに車両Aを駐車する運転操作を円滑に開始し得る。
さらに第三実施形態では、走行スペースPaSの走行を支援する狭路走行支援コンテンツCTnrを特定コンテンツCTisとして表示させる場合に、走行スペースPaSへ向けて移動する誘導コンテンツCTGpが関連コンテンツCTrとして表示される。こうした誘導コンテンツCTGpは、ドライバの注意を狭路となる走行スペースPaSに早期に向けさせることができる。その結果、ドライバは、走行スペースPaSに車両Aをスムーズに進入させ、狭路内での狭路走行支援コンテンツCTnrによる走行支援と相俟って、狭路の通過を速やかに実施できる。
加えて第三実施形態では、自車前方の道路形状を示すカーブ案内コンテンツCTcsを特定コンテンツCTisとして表示させる場合に、前景中の消失点へ向けて移動する誘導コンテンツCTGfが関連コンテンツCTrとして表示される。こうした誘導コンテンツCTGfは、ドライバの注意をより遠方に向けさせて、次のカーブ区間CuSの走行に備えた行動をドライバに促すことができる。その結果、ドライバは、例えば視界不良のシーンにおいても、カーブ区間CuSの進入前に適切な減速を実施し、カーブ案内コンテンツCTcsに従った円滑な走行をカーブ区間CuSにおいて継続できる。
尚、第三実施形態では、誘導コンテンツCTGtが「物標誘導コンテンツ」に相当し、誘導コンテンツCTGpが「狭路誘導コンテンツ」に相当する。また、カーブ案内コンテンツCTcsが「形状案内コンテンツ」に相当し、誘導コンテンツCTGpが「前景誘導コンテンツ」に相当する。
(他の実施形態)
以上、本開示による複数の実施形態について説明したが、本開示は、上記実施形態に限定して解釈されるものではなく、本開示の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。
上記実施形態の変形例1では、切替機構として、画角VAの位置を左右方向Yo(図1参照)に移動させるためのアクチュエータがHUDに設けられている。具体的に、変形例1では、重畳位置VP2の左右にそれぞれ左報知位置及び右報知位置が規定されている。ヘッドアップECU70は、例えば右折交差点でのターンバイターン表示にて、地点通知画像Ptp(図23下段参照)を表示させる場合に、画角位置を重畳位置VP2から右報知位置に移動させる。一例として、ヘッドアップECU70は、ステアリング操作に基づき、自車の右旋回が開始されたタイミングで、画角位置の移動を開始させる。同様に、ヘッドアップECU70は、左折交差点でのターンバイターン表示では、左旋回が開始されてタイミングで、重畳位置VP2から左報知位置に画角VAを移動させる。
以上の変形例1のように、HUDに設定可能な画角位置の数は、上記実施形態に例示された数に限定されない。加えて、複数規定された各画角位置は、互いに境界が接する位置関係であってもよく、互いに離れている位置関係であってもよく、互いに一部が重なっている位置関係であってもよい。また、画角VAの移動方向は、上下方向USに限定されず、変形例1のような左右方向Yoであってもよく、前後方向ZGであってもよい。さらに、上下方向US、左右方向Yo及び前後方向ZGの各移動を複合的に組み合わせた画角移動が実施されてよい。こうした画角移動を可能にする機構も、適宜変更されてよい。
各画角位置にて表示されるコンテンツは、重畳コンテンツCTs及び非重畳コンテンツCTnのうちで適宜変更されてよい。同様に、画角VAの移動後に表示される特定コンテンツCTisは、重畳コンテンツCTsに限定されず、非重畳コンテンツCTnであってもよい。さらに、特定コンテンツCTisは、緊急性のある警告情報をドライバに通知する警告コンテンツであってもよく、緊急性のない車両Aのステータス情報をドライバに通知する通知コンテンツであってもよい。また、関連コンテンツCTrも、重畳コンテンツCTs及び非重畳コンテンツCTnのいずれであってもよい。
加えて、各コンテンツとなる画像の形状、発光色、表示位置等は、ドライバの嗜好に応じて変更可能であってよい。さらに、言語及び単位の種類は、ドライバ等のユーザ設定、並びに車両Aが使用される国及び地域等の設定に基づき、適宜変更されてよい。
上記実施形態の変形例2では、関連コンテンツCTrが画角移動開始前のみに表示される。即ち、変形例2では、通常位置VP1から重畳位置VP2までの移動期間TM1での関連コンテンツCTrの表示は、省略される。以上のように、関連コンテンツCTrの表示期間は、重畳位置VP2への移動が完了する以前の期間のうちで適宜変更されてよい。
上記実施形態の変形例3では、HUD100による画角VAの移動と連携したメータ表示装置30の表示変化が実施されない。具体的に、変形例3では、移動期間TM1での詳細情報PDiのトーンダウン、及び特定コンテンツCTisの表示期間における詳細情報PDiの表示中断は、実施されない。
上記実施形態の変形例4では、ヘッドアップECU70の処理機能の一部又は全てが、例えばHCU(Human Machine Interface Control Unit)等の統合御装置に実装されている。こうしたHCUには、メータECU32の処理機能がさらに集約されていてもよい。以上の変形例4でも、HUDが「虚像表示装置」となる。
上記実施形態の変形例5では、詳細情報PDiは、画角VAが重畳位置VP2にある期間においても、表示を継続される。詳細情報PDiは、画角VAが重畳位置VP2に移動した後も、画角VAが通常位置VP1にある期間よりも視認性を低くされた状態で表示を継続される。一例として、詳細情報PDiは、輝度又は彩度が低い状態にされる。
HUD100のPGU61には、LCDパネル及びバックライトに替えて、EL(Electro Luminescence)パネルが設けられていてもよい。また、ELパネルに替えて、プラズマディスプレイパネル、ブラウン管及びLED等の表示器を用いたPGU61が採用されてもよい。さらに、LCDパネル及びバックライトに替えて、レーザプロジェクタ又はDLP(Digital Light Processing,登録商標)とスクリーンとが設けられていてもよい。こうした構成を採用したPGU61では、スクリーンに描画された表示像が、拡大光学系62によってウィンドシールドWSに投影され、虚像Viとして結像される。加えて、拡大光学系62に採用される光学要素は、凹面鏡に限定されず、種々のミラー、レンズ及びホログラフィック光学素子等、適宜変更されてよい。
上記実施形態のヘッドアップECU70及びメータECU32に設けられる処理部は、RAMと結合された演算処理のためのハードウェアである。処理部は、CPU(Central Processing Unit)及びGPU(Graphics Processing Unit)等の演算コアを少なくとも一つ含む構成である。処理部は、例えばFPGA(Field-Programmable Gate Array)及び他の専用機能を備えたIPコア等をさらに含む構成であってよい。一方、RAMは、映像生成のためのビデオRAMを含む構成であってよい。処理部は、RAMへのアクセスにより、本開示の虚像表示方法を実現するための種々の処理を実行する。ストレージは、不揮発性の記憶媒体を含む構成である。各ECU32,70のストレージには、処理部によって実行される種々のプログラム(表示制御プログラム等)が格納されている。
上記実施形態にて、ヘッドアップECU70及びメータECU32によって提供されていた各機能は、ソフトウェア及びそれを実行するハードウェア、ソフトウェアのみ、ハードウェアのみ、あるいはそれらの複合的な組合せによっても提供可能である。さらに、こうした機能がハードウェアとしての電子回路によって提供される場合、各機能は、多数の論理回路を含むデジタル回路、又はアナログ回路によっても提供可能である。
また、上記の虚像表示方法を実現可能なプログラム等を記憶する記憶媒体の形態も、適宜変更されてよい。例えば記憶媒体は、回路基板上に設けられた構成に限定されず、メモリカード等の形態で提供され、スロット部に挿入されて、HCUの制御回路に電気的に接続される構成であってよい。さらに、記憶媒体は、HCUへのプログラムのコピー基となる光学ディスク及びのハードディスクドライブ等であってもよい。
本開示に記載の制御部及びその手法は、コンピュータプログラムにより具体化された一つ乃至は複数の機能を実行するようにプログラムされたプロセッサを構成する専用コンピュータにより、実現されてもよい。あるいは、本開示に記載の装置及びその手法は、専用ハードウェア論理回路により、実現されてもよい。もしくは、本開示に記載の装置及びその手法は、コンピュータプログラムを実行するプロセッサと一つ以上のハードウェア論理回路との組み合わせにより構成された一つ以上の専用コンピュータにより、実現されてもよい。また、コンピュータプログラムは、コンピュータにより実行されるインストラクションとして、コンピュータ読み取り可能な非遷移有形記録媒体に記憶されていてもよい。