JP7309604B2 - 遊園地アトラクション制御管理システム及び方法 - Google Patents
遊園地アトラクション制御管理システム及び方法 Download PDFInfo
- Publication number
- JP7309604B2 JP7309604B2 JP2019527311A JP2019527311A JP7309604B2 JP 7309604 B2 JP7309604 B2 JP 7309604B2 JP 2019527311 A JP2019527311 A JP 2019527311A JP 2019527311 A JP2019527311 A JP 2019527311A JP 7309604 B2 JP7309604 B2 JP 7309604B2
- Authority
- JP
- Japan
- Prior art keywords
- panel
- control system
- vehicle
- course
- ride
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title description 19
- 238000012544 monitoring process Methods 0.000 claims description 15
- 239000011159 matrix material Substances 0.000 claims description 5
- 230000001154 acute effect Effects 0.000 claims description 4
- 230000003213 activating effect Effects 0.000 claims description 3
- 230000002547 anomalous effect Effects 0.000 claims 1
- 230000009471 action Effects 0.000 description 12
- 230000000875 corresponding effect Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 230000000694 effects Effects 0.000 description 8
- 230000008569 process Effects 0.000 description 8
- 230000000007 visual effect Effects 0.000 description 8
- 230000006870 function Effects 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 6
- 238000001514 detection method Methods 0.000 description 4
- 230000003993 interaction Effects 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- 238000011156 evaluation Methods 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000003278 mimic effect Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000003909 pattern recognition Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000000750 progressive effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000012552 review Methods 0.000 description 2
- RZVAJINKPMORJF-UHFFFAOYSA-N Acetaminophen Chemical compound CC(=O)NC1=CC=C(O)C=C1 RZVAJINKPMORJF-UHFFFAOYSA-N 0.000 description 1
- 241000086550 Dinosauria Species 0.000 description 1
- 239000004606 Fillers/Extenders Substances 0.000 description 1
- 241000282412 Homo Species 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000005352 clarification Methods 0.000 description 1
- 230000001149 cognitive effect Effects 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000013480 data collection Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000004438 eyesight Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000004313 glare Effects 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 230000001976 improved effect Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 206010037844 rash Diseases 0.000 description 1
- 230000035943 smell Effects 0.000 description 1
- 239000000779 smoke Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images




Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63G—MERRY-GO-ROUNDS; SWINGS; ROCKING-HORSES; CHUTES; SWITCHBACKS; SIMILAR DEVICES FOR PUBLIC AMUSEMENT
- A63G31/00—Amusement arrangements
- A63G31/16—Amusement arrangements creating illusions of travel
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63G—MERRY-GO-ROUNDS; SWINGS; ROCKING-HORSES; CHUTES; SWITCHBACKS; SIMILAR DEVICES FOR PUBLIC AMUSEMENT
- A63G1/00—Roundabouts
- A63G1/08—Roundabouts power-driven
- A63G1/10—Roundabouts power-driven electrically driven
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63G—MERRY-GO-ROUNDS; SWINGS; ROCKING-HORSES; CHUTES; SWITCHBACKS; SIMILAR DEVICES FOR PUBLIC AMUSEMENT
- A63G7/00—Up-and-down hill tracks; Switchbacks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/60—Editing figures and text; Combining figures or text
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T13/00—Animation
- G06T13/80—2D [Two Dimensional] animation, e.g. using sprites
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/181—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a plurality of remote sources
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/14—Digital output to display device ; Cooperation and interconnection of the display device with other functional units
- G06F3/1423—Digital output to display device ; Cooperation and interconnection of the display device with other functional units controlling a plurality of local displays, e.g. CRT and flat panel display
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/14—Digital output to display device ; Cooperation and interconnection of the display device with other functional units
- G06F3/1423—Digital output to display device ; Cooperation and interconnection of the display device with other functional units controlling a plurality of local displays, e.g. CRT and flat panel display
- G06F3/1446—Digital output to display device ; Cooperation and interconnection of the display device with other functional units controlling a plurality of local displays, e.g. CRT and flat panel display display composed of modules, e.g. video walls
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- User Interface Of Digital Computer (AREA)
- Human Computer Interaction (AREA)
- General Engineering & Computer Science (AREA)
- Selective Calling Equipment (AREA)
- Automobile Manufacture Line, Endless Track Vehicle, Trailer (AREA)
- General Factory Administration (AREA)
Description
本出願は、2016年11月21日に出願された「乗り物制御室のためのシステム及び方法(SYSTEMS AND METHODS FOR A RIDE CONTROL ROOM)」という名称の米国仮特許出願第62/424,870号に対する優先権及びその利益を主張するものであり、この文献は全ての目的でその全体が引用により本明細書に組み入れられる。
Claims (16)
- 乗り物制御システムであって、前記乗り物制御システムは、
コース内に位置する複数の乗り物車両であって前記コース内を移動するように構成された複数の乗り物車両と、
前記複数の乗り物車両が前記コース内を移動する際に前記複数の乗り物車両の位置情報を取得するように構成された複数のセンサであって、画像を取り込むように構成されたカメラを含む、複数のセンサと、
前記取得された位置情報に基づいて前記複数の乗り物車両の動作を制御するように構成された制御システムと、
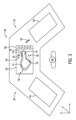
前記複数の乗り物車両が前記コース内を移動する際に、前記取得された位置情報に基づいて、前記コース内の前記複数の乗り物車両の位置及び動きのアニメーションを表示するように構成された少なくとも1つのインターフェイスパネルを含むワークステーションであって、前記少なくとも1つのインターフェイスパネルは前記インターフェイスパネルをモニタするオペレータの位置に面する、ワークステーションと、
前記少なくとも1つのインターフェイスパネルから離れたアレイ壁に位置する1又は2以上のパネルディスプレイと、を含み、
前記1又は2以上のパネルディスプレイは、行列状に配置された複数の画像を表示するように構成され、前記複数の画像の少なくとも一部は、前記カメラからの画像に対応し、前記制御システムは、前記取得された位置情報に基づいて、前記複数の画像のうちの一の画像内にグラフィックインジケータを提供するように構成され、前記グラフィックインジケータは、前記複数の乗り物車両が前記一の画像内に表示されることを示し、前記1又は2以上のパネルディスプレイは、前記1又は2以上のパネルディスプレイの位置を調整可能なアクチュエータを含む、
乗り物制御システム。 - 前記複数の画像は、前記コースの進行に基づいて左から右及び上から下に配置される、請求項1に記載の乗り物制御システム。
- 前記カメラからの画像に対応する前記複数の画像の前記少なくとも一部は、関連するカメラのグラフィックラベルを含み、各グラフィックラベルは、前記関連するカメラを示す記号、形、色、又はこれらの組み合わせを含む、請求項1に記載の乗り物制御システム。
- 前記制御システムは、前記一の画像内に第1の追加のグラフィックインジケータ及び第2の追加のグラフィックインジケータを提供するように構成され、前記第1の追加のグラフィックインジケータは、前記複数の乗り物車両の前記一の画像への入口位置を示し、前記第2の追加のグラフィックインジケータは、前記複数の乗り物車両の前記一の画像からの出口位置を示す、請求項1に記載の乗り物制御システム。
- 前記グラフィックインジケータ、前記第1の追加のグラフィックインジケータ、前記第2の追加のグラフィックインジケータ、又はこれらの組み合わせは、半透明としてレンダリングされる、請求項4に記載の乗り物制御システム。
- 前記第2の追加のグラフィックインジケータは、前記複数の乗り物車両が次に示される画像への参照を含む、請求項4に記載の乗り物制御システム。
- 前記第1の追加のグラフィックインジケータは、直前に前記複数の乗り物車両が示された画像への参照を含む、請求項4に記載の乗り物制御システム。
- 前記複数の画像の最下列は、前記オペレータの位置から前記少なくとも1つのインターフェイスパネルの上方に明確に視認できる、請求項1に記載の乗り物制御システム。
- 前記複数のセンサの一部は前記複数の乗り物車両上に存在し、前記複数の乗り物車両の各々は、前記制御システムと連動するように構成された車両コントローラを含む、請求項1に記載の乗り物制御システム。
- 前記ワークステーション及び前記1又は2以上のパネルディスプレイは、前記コースから離れた制御室内に配置される、請求項1に記載の乗り物制御システム。
- 前記アニメーション上にデジタル的に重なり合った画像を表示するように構成された単独パネルを含む、請求項1に記載の乗り物制御システム。
- 前記デジタル的に重なり合った画像は、前記複数の乗り物車両のうちの少なくとも1つの乗り物車両に関連する情報、特定のセンサに関連する情報、シーン名、前記コースに沿った構造的参照物、ショーイベントの名称若しくは状態、又はこれらの組み合わせを含む、請求項11に記載の乗り物制御システム。
- 前記制御システムは、前記カメラからの過去の画像を含む前記複数のセンサからのデータを記憶し、及び、前記オペレータが異常な動きを認識することを容易にするために、前記複数のセンサの前記記憶されたデータに基づいてゴースト画像を表示するように構成される、請求項11に記載の乗り物制御システム。
- システムであって、前記システムは、
複数の乗り物車両に通信可能に結合された中央コントローラであって、前記複数の乗り物車両は、コース内に位置し、及び前記コース内を移動するように構成され、前記複数の乗り物車両の各乗り物車両は、前記乗り物車両の動きを制御するように構成された車両コントローラを含む、中央コントローラと、
制御室内に位置するワークステーションと、
前記ワークステーションのオペレータ位置に面する前記ワークステーションのインターフェイスであって、前記複数の乗り物車両が前記コースに沿って移動する際に、前記コースに沿ってセンサフィードバックに基づいて決定される予測位置において前記複数の乗り物車両のアニメーションを表示するように構成された1又は2以上のインターフェイスパネルを含む、前記ワークステーションのインターフェイスと、
前記コースに沿って位置するカメラゾーン内に配置されたカメラからの画像を含む行列状に配置された複数の画像を表示するように構成された1又は2以上のパネルディスプレイであって、前記複数の画像は、前記コースに沿って進む前記複数の乗り物車両の動きの対応する順序に従って左から右に及び上から下に順序付けられ、前記1又は2以上のパネルディスプレイは、前記1又は2以上のインターフェイスパネルから離れたアレイ壁に位置する、1又は2以上のパネルディスプレイと、
前記コースに沿って位置する複数のスピーカ及び前記複数のスピーカのうちの1又は2以上のスピーカを作動させるように構成された前記ワークステーションのマイクと、を含み、
前記1又は2以上のインターフェイスパネルの単独画面は、前記カメラからの画像の一部を表示するように構成され、前記単独画面が前記カメラからの画像のうちの特定の画像を表示しているとき、前記マイクによる前記複数のスピーカのうちの前記1又は2以上のスピーカの作動は、前記特定の画像に関連する前記複数のスピーカのうちの特定のスピーカの作動を含む、
システム。 - 前記制御室は、前記ワークステーションの前記オペレータ位置からの妨げられていない見通し線内に位置する前記1又は2以上のパネルディスプレイを含む前記アレイ壁を含む、請求項14に記載のシステム。
- 乗り物制御システムであって、前記乗り物制御システムは、
コース内に位置する複数の乗り物車両であって前記コース内を移動するように構成された複数の乗り物車両と、
前記複数の乗り物車両が前記コース内を移動する際に前記複数の乗り物車両の位置情報を取得するように構成された複数のセンサであって、画像を取り込むように構成されたカメラを含む、複数のセンサと、
前記取得された位置情報に基づいて前記複数の乗り物車両の動作を制御するように構成された制御システムと、
前記複数の乗り物車両が前記コース内を移動する際に、前記取得された位置情報に基づいて、前記コース内の前記複数の乗り物車両の位置及び動きのアニメーションを表示するように構成された少なくとも1つのインターフェイスパネルを含むワークステーションであって、前記少なくとも1つのインターフェイスパネルは前記インターフェイスパネルをモニタするオペレータの位置に面する、ワークステーションと、
前記少なくとも1つのインターフェイスパネルから離れたアレイ壁に位置する1又は2以上のパネルディスプレイと、を含み、
前記1又は2以上のパネルディスプレイは、行列状に配置された複数の画像を表示するように構成され、前記複数の画像の少なくとも一部は、前記カメラからの画像に対応し、前記制御システムは、前記取得された位置情報に基づいて、前記複数の画像のうちの一の画像内にグラフィックインジケータを提供するように構成され、前記グラフィックインジケータは、前記複数の乗り物車両が前記一の画像内に表示されることを示し、前記ワークステーションの前記少なくとも1つのインターフェイスパネルは、単独画面とメニューパネルとの間に位置する概観パネルを含み、前記概観パネル、前記単独画面、及び前記メニューパネルの各々は、前記概観パネル、前記単独画面、及び前記メニューパネルの各々の下縁部が前記ワークステーションの作業面に隣接し、前記概観パネル、前記単独画面、及び前記メニューパネルの各々の上縁部が前記オペレータの位置から離れて位置し、かつ、前記概観パネル、前記単独画面、及び前記メニューパネルの各々の後縁部が水平位置に対して鋭角で位置するように、前記オペレータの位置に対して後方に傾斜する、
乗り物制御システム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662424870P | 2016-11-21 | 2016-11-21 | |
| US62/424,870 | 2016-11-21 | ||
| US15/439,720 | 2017-02-22 | ||
| US15/439,720 US10449462B2 (en) | 2016-11-21 | 2017-02-22 | Amusement park attraction control management system and method |
| PCT/US2017/062279 WO2018094198A1 (en) | 2016-11-21 | 2017-11-17 | Amusement park attraction control management system and method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019535425A JP2019535425A (ja) | 2019-12-12 |
| JP2019535425A5 JP2019535425A5 (ja) | 2021-01-07 |
| JP7309604B2 true JP7309604B2 (ja) | 2023-07-18 |
Family
ID=62144643
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019527311A Active JP7309604B2 (ja) | 2016-11-21 | 2017-11-17 | 遊園地アトラクション制御管理システム及び方法 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US10449462B2 (ja) |
| EP (1) | EP3541488B1 (ja) |
| JP (1) | JP7309604B2 (ja) |
| KR (1) | KR102176998B1 (ja) |
| CN (1) | CN109982758B (ja) |
| CA (1) | CA3044049A1 (ja) |
| ES (1) | ES2881517T3 (ja) |
| MY (1) | MY195218A (ja) |
| RU (1) | RU2753949C2 (ja) |
| SG (1) | SG11201903668VA (ja) |
| WO (1) | WO2018094198A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10357721B2 (en) * | 2017-06-28 | 2019-07-23 | Disney Enterprises, Inc. | Distributed and autonomous control system for guided-path vehicles |
| US10761542B1 (en) * | 2017-07-11 | 2020-09-01 | Waymo Llc | Methods and systems for keeping remote assistance operators alert |
| US11090576B2 (en) * | 2018-10-29 | 2021-08-17 | Universal City Studios Llc | Special effects visualization techniques |
| CN109741767A (zh) * | 2018-12-27 | 2019-05-10 | 浙江大丰实业股份有限公司 | 多场景音频播放控制方法、装置、计算机设备和存储介质 |
| US10825196B2 (en) * | 2019-02-15 | 2020-11-03 | Universal City Studios Llc | Object orientation detection system |
| US11354862B2 (en) * | 2019-06-06 | 2022-06-07 | Universal City Studios Llc | Contextually significant 3-dimensional model |
| US11501591B2 (en) * | 2020-02-20 | 2022-11-15 | Universal City Studios Llc | System and method for monitoring queue characteristics and initiating adjustments |
| US11813542B2 (en) | 2020-05-08 | 2023-11-14 | Universal City Studios Llc | Ride vehicle tracking system |
| US11822852B2 (en) * | 2021-03-16 | 2023-11-21 | Activu Corporation | System and methods for automated collection, aggregation, distribution, display, and recording of alert related information |
| WO2023249947A1 (en) * | 2022-06-22 | 2023-12-28 | Universal City Studios Llc | Systems and methods for ride system audio and visual effect synchronization |
| US20240316470A1 (en) * | 2023-03-21 | 2024-09-26 | Antonio Zamperla S.P.A. | System and method for controlling carousels |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000276040A (ja) | 1999-03-19 | 2000-10-06 | Honda Motor Co Ltd | 運転シミュレーション装置 |
| US20070106484A1 (en) | 2005-11-04 | 2007-05-10 | Triverity Corporation | Entertainment ride experience enhancement system |
| JP5146951B2 (ja) | 2007-07-31 | 2013-02-20 | 日本電産サンキョー株式会社 | レンズ駆動装置 |
| WO2015179298A1 (en) | 2014-05-21 | 2015-11-26 | Universal City Studios Llc | Virtual attraction controller |
| JP7265549B2 (ja) | 2017-12-06 | 2023-04-26 | コグニティヴ システムズ コーポレイション | 双方向チャネルサウンディングに基づく動き検出及び位置特定 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1711941A1 (ru) * | 1989-11-01 | 1992-02-15 | Проектно-Конструкторский И Технологический Институт "Культтехника" | Устройство дл развлечений |
| JP3563079B2 (ja) * | 1991-11-29 | 2004-09-08 | 株式会社島津製作所 | 工程管理装置 |
| US5583844A (en) | 1993-06-19 | 1996-12-10 | The Walt Disney Company | Programming device and method for controlling ride vehicles in an amusement attraction |
| US5403238A (en) * | 1993-08-19 | 1995-04-04 | The Walt Disney Company | Amusement park attraction |
| JPH07265549A (ja) * | 1994-03-31 | 1995-10-17 | Sega Enterp Ltd | サーキットゲーム装置 |
| US5774172A (en) | 1996-02-12 | 1998-06-30 | Microsoft Corporation | Interactive graphics overlay on video images for entertainment |
| JPH1196494A (ja) * | 1997-09-22 | 1999-04-09 | Hitachi Ltd | 交通流監視方法および装置 |
| US6220965B1 (en) | 1998-07-08 | 2001-04-24 | Universal City Studios Inc. | Amusement system |
| JP2000079281A (ja) | 1998-09-07 | 2000-03-21 | Namco Ltd | 遊戯用乗り物を用いる遊戯装置 |
| NZ506297A (en) * | 2000-08-11 | 2002-09-27 | Queenstown Property Ltd | A chute propelled amusement ride with bungy aided free fall after the discharge point |
| US20040119822A1 (en) | 2002-12-20 | 2004-06-24 | Custer Robert J. | Multiple camera system on single monitor display |
| GB0323386D0 (en) * | 2003-10-07 | 2003-11-05 | Johnson Matthey Plc | Catalyst for manufacture of esters |
| US7177706B2 (en) | 2004-08-13 | 2007-02-13 | Disney Enterprises, Inc. | Automated attraction and ride maintenance verification system |
| US7955168B2 (en) | 2005-06-24 | 2011-06-07 | Disney Enterprises, Inc. | Amusement ride and video game |
| JP4445493B2 (ja) * | 2006-07-31 | 2010-04-07 | 富士通テン株式会社 | 運転支援装置 |
| CN101782933B (zh) | 2009-12-15 | 2012-11-28 | 中广核工程有限公司 | 核电站控制室的虚拟漫游设计方法及系统 |
| WO2013106243A1 (en) | 2012-01-12 | 2013-07-18 | West Kanye Omari | Multiple screens for immersive audio/video experience |
| JP5992219B2 (ja) * | 2012-06-15 | 2016-09-14 | 株式会社セガ・ライブクリエイション | 移動スクリーン機構を備えたライドアトラクション及び該移動スクリーン機構 |
| US9008908B2 (en) * | 2013-07-09 | 2015-04-14 | Denso International America, Inc. | Head-up display and method with speed sensitive light intensity |
| US9358473B2 (en) | 2015-03-24 | 2016-06-07 | Anthony Frolov | Interactive amusement attraction |
-
2017
- 2017-02-22 US US15/439,720 patent/US10449462B2/en active Active
- 2017-11-17 WO PCT/US2017/062279 patent/WO2018094198A1/en active Application Filing
- 2017-11-17 MY MYPI2019002361A patent/MY195218A/en unknown
- 2017-11-17 KR KR1020197017725A patent/KR102176998B1/ko active IP Right Grant
- 2017-11-17 CN CN201780071938.4A patent/CN109982758B/zh active Active
- 2017-11-17 JP JP2019527311A patent/JP7309604B2/ja active Active
- 2017-11-17 SG SG11201903668VA patent/SG11201903668VA/en unknown
- 2017-11-17 CA CA3044049A patent/CA3044049A1/en active Pending
- 2017-11-17 ES ES17812142T patent/ES2881517T3/es active Active
- 2017-11-17 EP EP17812142.2A patent/EP3541488B1/en active Active
- 2017-11-17 RU RU2019119217A patent/RU2753949C2/ru active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000276040A (ja) | 1999-03-19 | 2000-10-06 | Honda Motor Co Ltd | 運転シミュレーション装置 |
| US20070106484A1 (en) | 2005-11-04 | 2007-05-10 | Triverity Corporation | Entertainment ride experience enhancement system |
| JP5146951B2 (ja) | 2007-07-31 | 2013-02-20 | 日本電産サンキョー株式会社 | レンズ駆動装置 |
| WO2015179298A1 (en) | 2014-05-21 | 2015-11-26 | Universal City Studios Llc | Virtual attraction controller |
| JP7265549B2 (ja) | 2017-12-06 | 2023-04-26 | コグニティヴ システムズ コーポレイション | 双方向チャネルサウンディングに基づく動き検出及び位置特定 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109982758A (zh) | 2019-07-05 |
| US10449462B2 (en) | 2019-10-22 |
| EP3541488A1 (en) | 2019-09-25 |
| RU2753949C2 (ru) | 2021-08-24 |
| WO2018094198A1 (en) | 2018-05-24 |
| CA3044049A1 (en) | 2018-05-24 |
| ES2881517T3 (es) | 2021-11-29 |
| MY195218A (en) | 2023-01-11 |
| CN109982758B (zh) | 2022-05-10 |
| RU2019119217A (ru) | 2020-12-21 |
| KR102176998B1 (ko) | 2020-11-10 |
| JP2019535425A (ja) | 2019-12-12 |
| KR20190082310A (ko) | 2019-07-09 |
| RU2019119217A3 (ja) | 2021-04-23 |
| SG11201903668VA (en) | 2019-05-30 |
| EP3541488B1 (en) | 2021-05-12 |
| US20180140957A1 (en) | 2018-05-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7309604B2 (ja) | 遊園地アトラクション制御管理システム及び方法 | |
| EP3497048B1 (de) | Steuerstand für einen kran, bagger und dergleichen | |
| CN104512336B (zh) | 3维导航 | |
| JP2020537209A (ja) | ユーザインタフェースの動作及び運動ベースの制御 | |
| CN106060456A (zh) | 车辆外侧相机系统和方法 | |
| DE202014104297U1 (de) | Kraftfahrzeug- und Industriebewegungssensorvorrichtung | |
| AU2014202889B2 (en) | Controlling movement of a camera to autonomously track a mobile object | |
| JP6898675B1 (ja) | リハビリテーション支援装置、その方法およびプログラム | |
| US20190284020A1 (en) | Augmented reality car operating panel | |
| US11787288B2 (en) | Systems and methods for user interfaces in a vehicular environment | |
| JP2019535425A5 (ja) | ||
| WO2016107674A1 (en) | Method supporting passengers of autonomous driving vehicles | |
| US11354862B2 (en) | Contextually significant 3-dimensional model | |
| KR20140008216A (ko) | 차량용 클러스터의 입체영상 구현장치 및 방법 | |
| EP3671417A1 (en) | A vehicle window adjustment control system, a computer-implemented method and a computer program, for controlling a plurality of windows on a vehicle | |
| JP5474395B2 (ja) | 車両用シート駆動装置 | |
| DE102023121804A1 (de) | Integrierte fahrzeugdynamik in einem campfire-display | |
| DE102024107166A1 (de) | Systeme und verfahren zum verwalten einer insasseninteraktion unter verwendung von tiefeninformationen | |
| DE102020212162A1 (de) | Einhausung für eine Herstellungs-Maschine und/oder einen Teil einer Fertigungsstraße sowie System zur Steuerung und/oder Regelung einer Fertigungsanlage | |
| KR20140146796A (ko) | 이동로봇의 주행경로 입력 장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201117 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201117 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220104 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220404 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220606 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221011 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20230110 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230310 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230605 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230705 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7309604 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |