JP7207912B2 - 運転評価システム - Google Patents
運転評価システム Download PDFInfo
- Publication number
- JP7207912B2 JP7207912B2 JP2018167112A JP2018167112A JP7207912B2 JP 7207912 B2 JP7207912 B2 JP 7207912B2 JP 2018167112 A JP2018167112 A JP 2018167112A JP 2018167112 A JP2018167112 A JP 2018167112A JP 7207912 B2 JP7207912 B2 JP 7207912B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- stop
- driving
- driving evaluation
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Traffic Control Systems (AREA)
Description
(1)車両に搭載された車載器と、前記車載器が検知した前記車両の運行情報に基づいて運転を評価する運転評価部とを有する運転評価システムであって、
前記車載器は、道路標示又は道路標識における少なくとも一部分を認識した結果に応じて運転のイベントを検知すると共に、前記イベントの種類に応じて、前記イベントに関連する少なくとも車速を含む前記車両の運行情報を収集し、
前記運転評価部は、前記イベントの種類に応じて、前記イベントに関連して収集された前記車両の運行情報を評価し、
前記車載器は、3文字で構成される「止まれ」の道路標示又は道路標識を認識する場合に、「れ」、「ま」、「止」のうち何れか2つ以上の文字のパターン認識に成功した時点で、「止まれ」の道路標示又は道路標識であると確定する、
ことを特徴とする運転評価システム。
ことを特徴とする上記(1)に記載の運転評価システム。
ことを特徴とする上記(1)に記載の運転評価システム。
ことを特徴とする上記(3)に記載の運転評価システム。
ことを特徴とする上記(1)乃至(4)のいずれかに記載の運転評価システム。
本発明の実施形態における運転評価システムの構成例を図1に示す。
(1)走行中における自車両と先行車両との車間距離が近すぎる(衝突までの余裕時間が短い)場合に警報を出力する機能。
(2)自車両が走行中の走行レーンの範囲を逸脱した場合に警報を出力する機能。
(3)自車両の走行速度が道路標示の制限速度を超えた場合に速度超過の警報を出力する機能。
(4)自車両の前進時に後方から接近する他車両の存在を運転者に知らせる機能。
(5)自車両の後退時などの状況で周囲の障害物等の存在を運転者に知らせる機能。
(6)「止まれ」などの道路標示がある場所で自車両が一時停止しなかった場合に警報を出力したり、一時停止の時間を測定し記録する機能。
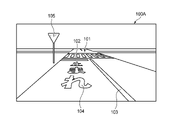
自車両の車載カメラで撮影される前方映像を含む画像フレーム100Aの例を図2に示す。
自車両が交差点にさしかかった時のデジタルタコグラフ10の動作例を図3に示す。すなわち、デジタルタコグラフ10内のCPU11が図3の制御を実施する。図3の動作について以下に説明する。
また、CPU11はS18で生成したイベントデータをメモリカード65に記録し(S20)、更に同じイベントデータをデータセンタ75へ送信する(S21)。
事務所PC30の動作例を図4に示す。図4に示した動作について以下に説明する。
事務所PC30を操作する管理者は、事務所PC30の電源を投入して使用可能な状態にした後、データ解析のための専用のアプリケーションソフトウェア(簡略化して「アプリ」と呼称する)を起動する(S31)。
データセンタ75内のサーバの動作例を図5に示す。この動作はサーバにより短い周期で繰り返し実行される。図5の動作について以下に説明する。
上述の運転評価システムにおいては、各車両の運転者が「止まれ」等の標示のある場所で一時停止の規定に違反して運転したことを検知して評価に反映したり、警報を出力することができる。したがって、運転者が「止まれ」等の標示を見落としたり、標示に気がついていても故意に一時停止せずに徐行しながら走行したようなマナー違反の運転を検出し、正しい評価を行うことが可能になる。また、検知した一時停止違反に対して、デジタルタコグラフ10やデータセンタ75のサーバがリアルタイムで警報を出力することにより、違反傾向のある運転者を指導し、運転マナーを向上させることが可能になる。また、管理者等は、事務所PC30の分析結果に基づき、一時停止違反に対する運転傾向を把握できるので、自社内の乗務員全体の運転の傾向を把握したり、乗務員毎の運転傾向を把握して安全運転の指導や教育に役立てることができる。
[1]車両に搭載された車載器(デジタルタコグラフ10)と、前記車載器が検知した前記車両の運行情報に基づいて運転を評価する運転評価部(CPU11、S18、S19、事務所PC30、データセンタ75)とを有する運転評価システムであって、
前記車載器は、道路標示又は道路標識における少なくとも一部分を認識した結果に応じて運転のイベントを検知する(S11、S12)と共に、前記イベントの種類に応じて、前記イベントに関連する少なくとも車速を含む前記車両の運行情報を収集し(S14、S15)、
前記運転評価部は、前記イベントの種類に応じて、前記イベントに関連して収集された前記車両の運行情報を評価する(S18、S19、S33~S37、S46~S49)、
ことを特徴とする運転評価システム。
ことを特徴とする上記[1]に記載の運転評価システム。
ことを特徴とする上記[1]に記載の運転評価システム。
ことを特徴とする上記[3]に記載の運転評価システム。
ことを特徴とする上記[1]乃至[4]のいずれかに記載の運転評価システム。
8 無線基地局
10 デジタルタコグラフ(車載器)
11,31 CPU
12A 速度I/F
12B エンジン回転I/F
13 外部入力I/F
14 センサ入力I/F
15 GPS受信部
15a GPSアンテナ
16 カメラI/F
17 記録部
18 カードI/F
19 音声I/F
20,42 スピーカ
21 RTC
22 SW入力部
23,23B 車載カメラ
24,32 通信部
25 電源部
26A 不揮発メモリ
26B 揮発メモリ
27 表示部
28 Gセンサ
29 アナログ入力I/F
30 事務所PC
33 表示部
34 記憶部
35 カードI/F
36 操作部
37 出力部
38 音声I/F
41 マイク
48 外部I/F
51 車速センサ
54 外部記憶装置
56 運行データDB
57 ハザードマップDB
65 メモリカード
70 インターネット
75 データセンタ
100A 画像フレーム
101 交差点
102 停止線の道路標示
103 白線の道路標示
104 一時停止の道路標示
105 道路標識
Claims (5)
- 車両に搭載された車載器と、前記車載器が検知した前記車両の運行情報に基づいて運転を評価する運転評価部とを有する運転評価システムであって、
前記車載器は、道路標示又は道路標識における少なくとも一部分を認識した結果に応じて運転のイベントを検知すると共に、前記イベントの種類に応じて、前記イベントに関連する少なくとも車速を含む前記車両の運行情報を収集し、
前記運転評価部は、前記イベントの種類に応じて、前記イベントに関連して収集された前記車両の運行情報を評価し、
前記車載器は、3文字で構成される「止まれ」の道路標示又は道路標識を認識する場合に、「れ」、「ま」、「止」のうち何れか2つ以上の文字のパターン認識に成功した時点で、「止まれ」の道路標示又は道路標識であると確定する、
ことを特徴とする運転評価システム。 - 前記車載器は、「れ」、「ま」、「止」の順番で文字毎に個別にパターン認識を行う、
ことを特徴とする請求項1に記載の運転評価システム。 - 前記車載器は、特定の道路標示又は道路標識を認識した場合に、車速の変化を所定期間監視して一時停止の有無を識別し、一時停止有の場合は停止時間の長さを計測し、一時停止の有無および計測した停止時間の長さを前記運行情報に含める、
ことを特徴とする請求項1に記載の運転評価システム。 - 前記車載器は、一時停止を指示する特定の道路標示又は道路標識を認識し、且つ前記車両における一時停止なしの運転状態を検知すると、運転者に対して警報を報知する、
ことを特徴とする請求項3に記載の運転評価システム。 - 前記運転評価部は、前記車載器とデータ通信可能なデータセンタ、前記車載器が記録した運行情報を取得可能な事務所PC、および前記車載器の少なくとも1箇所に備わっている、
ことを特徴とする請求項1乃至請求項4のいずれか1項に記載の運転評価システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018167112A JP7207912B2 (ja) | 2018-09-06 | 2018-09-06 | 運転評価システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018167112A JP7207912B2 (ja) | 2018-09-06 | 2018-09-06 | 運転評価システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020042353A JP2020042353A (ja) | 2020-03-19 |
| JP7207912B2 true JP7207912B2 (ja) | 2023-01-18 |
Family
ID=69798397
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018167112A Active JP7207912B2 (ja) | 2018-09-06 | 2018-09-06 | 運転評価システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7207912B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7290506B2 (ja) * | 2019-08-06 | 2023-06-13 | 矢崎エナジーシステム株式会社 | 特定文字列検知装置及び運転評価システム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009217615A (ja) | 2008-03-11 | 2009-09-24 | Toyota Motor Corp | 運転評価装置 |
| JP2010020486A (ja) | 2008-07-09 | 2010-01-28 | Autonetworks Technologies Ltd | 道路標示認識装置 |
| JP2014010774A (ja) | 2012-07-02 | 2014-01-20 | Denso Corp | 車両用表示装置 |
-
2018
- 2018-09-06 JP JP2018167112A patent/JP7207912B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009217615A (ja) | 2008-03-11 | 2009-09-24 | Toyota Motor Corp | 運転評価装置 |
| JP2010020486A (ja) | 2008-07-09 | 2010-01-28 | Autonetworks Technologies Ltd | 道路標示認識装置 |
| JP2014010774A (ja) | 2012-07-02 | 2014-01-20 | Denso Corp | 車両用表示装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020042353A (ja) | 2020-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20220262239A1 (en) | Determining causation of traffic events and encouraging good driving behavior | |
| JP7146516B2 (ja) | 運転評価装置および車載器 | |
| JP6342858B2 (ja) | 運転評価装置 | |
| JP4752836B2 (ja) | 道路環境情報通知装置及び道路環境情報通知プログラム | |
| CN110738842A (zh) | 事故责任划分及行为分析方法、装置、设备及存储介质 | |
| JP2009181420A (ja) | 車両用周辺状況記録装置 | |
| JP4093026B2 (ja) | 道路環境情報通知装置、車載報知装置、情報センタ内装置、及び道路環境情報通知プログラム | |
| JP7207916B2 (ja) | 車載器 | |
| WO2017022534A1 (ja) | 運転評価装置 | |
| CN111354182A (zh) | 一种辅助驾驶方法和系统 | |
| WO2018135509A1 (ja) | イベント予測システム、イベント予測方法、プログラムおよびそれを記録した記録媒体 | |
| JP2012159955A (ja) | 画像記録制御方法および画像認識装置ならびに車載画像記録装置 | |
| CN114341962A (zh) | 危险车辆显示系统、危险车辆显示装置、危险车辆显示程序以及计算机可读取的记录介质以及进行了记录的设备 | |
| US20190205669A1 (en) | Detection of a dangerous situation in road trffic | |
| KR102319383B1 (ko) | 블랙박스 영상을 이용하여 교통 법규 위반 차량을 자동으로 신고하는 장치 및 방법 | |
| JP7207912B2 (ja) | 運転評価システム | |
| US11899909B1 (en) | System on board an on-road vehicle for identifying, tagging and reporting hazardous drivers in the vicinity of a host vehicle | |
| JP7364365B2 (ja) | 車載器及び運転評価システム | |
| JP7290506B2 (ja) | 特定文字列検知装置及び運転評価システム | |
| JP7057074B2 (ja) | 車載器および運転支援装置 | |
| CN114333414A (zh) | 停车让行检测装置、停车让行检测系统以及记录介质 | |
| CN113593253A (zh) | 车辆的闯红灯监测方法和装置 | |
| Tsai et al. | A safety driving assistance system by integrating in-vehicle dynamics and real-time traffic information | |
| JP7267760B2 (ja) | 運転評価システム及び車載器 | |
| JP7280051B2 (ja) | 運転評価システム及び車載器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210818 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220616 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220719 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230104 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230105 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7207912 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |