JP7195900B2 - 振動波モータ及びそれを有する電子機器 - Google Patents
振動波モータ及びそれを有する電子機器 Download PDFInfo
- Publication number
- JP7195900B2 JP7195900B2 JP2018225865A JP2018225865A JP7195900B2 JP 7195900 B2 JP7195900 B2 JP 7195900B2 JP 2018225865 A JP2018225865 A JP 2018225865A JP 2018225865 A JP2018225865 A JP 2018225865A JP 7195900 B2 JP7195900 B2 JP 7195900B2
- Authority
- JP
- Japan
- Prior art keywords
- shaft
- contact
- wave motor
- vibration wave
- motor according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000002093 peripheral effect Effects 0.000 claims description 36
- 238000003825 pressing Methods 0.000 claims description 7
- 238000003384 imaging method Methods 0.000 claims description 4
- 238000013016 damping Methods 0.000 description 9
- 229920001971 elastomer Polymers 0.000 description 9
- 230000001105 regulatory effect Effects 0.000 description 9
- 238000005096 rolling process Methods 0.000 description 7
- 229920005549 butyl rubber Polymers 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000000750 progressive effect Effects 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000005489 elastic deformation Effects 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000004091 panning Methods 0.000 description 2
- 229920002379 silicone rubber Polymers 0.000 description 2
- 239000004945 silicone rubber Substances 0.000 description 2
- 229910001220 stainless steel Inorganic materials 0.000 description 2
- 239000010935 stainless steel Substances 0.000 description 2
- 229910001369 Brass Inorganic materials 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000010951 brass Substances 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 210000002478 hand joint Anatomy 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229920001084 poly(chloroprene) Polymers 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 230000035882 stress Effects 0.000 description 1
Images









Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/14—Drive circuits; Control arrangements or methods
- H02N2/142—Small signal circuits; Means for controlling position or derived quantities, e.g. speed, torque, starting, stopping, reversing
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/16—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors using travelling waves, i.e. Rayleigh surface waves
- H02N2/163—Motors with ring stator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
- B25J9/126—Rotary actuators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
- H02N2/006—Elastic elements, e.g. springs
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/103—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors by pressing one or more vibrators against the rotor
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
- Accessories Of Cameras (AREA)
- Manipulator (AREA)
Description
前記接触体の他の一部は、前記軸体の周方向における位置及び前記軸体の軸方向における位置のうち、前記軸体の周方向における位置のみが前記軸体に対して固定されており、
前記位置決め部材は、前記接触体の一部に設けられた第1の凹部の底面に接触するように、前記第1の凹部に収納されていることを特徴とする。
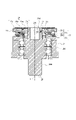
また、本発明の一実施形態に係る振動波モータは、中空部と周方向に延在する外周面とを有し軸方向に延在する軸体と、前記軸体が貫通される第1の穴部が設けられた環状の振動体と、前記軸体が貫通される第2の穴部が設けられ前記振動体と接触する環状の接触部と、前記軸体が配置される第3の穴部を形成する内周面を有するとともに前記接触部を前記軸方向において前記振動体の側に加圧する環状の加圧部と、を含む環状の接触体と、前記中空部の側から前記軸体に螺合されるとともに前記軸体の前記外周面から突出した先端が前記加圧部の前記内周面に当接することで前記軸方向の所定位置において前記加圧部と前記軸体とを固定する固定部材と、を有する。
第1の実施形態として、本発明を適用した回転型の振動波モータの構成例について、図1,2,3を用いて説明する。
第2の実施形態として、第1の実施形態とは異なる形態の振動波モータの構成例について、図6を用いて説明する。本実施形態は、第1の実施形態に対して、振動体や接触部材、出力部を図6に示す構造とした点において相違する。本実施形態のその他の要素は、上述した第1の実施形態の対応するものと同一なので、図番の末尾をそろえることにより説明を省略する。
第3の実施形態では、上述した各実施形態に係る振動波モータを備える装置(機械)の一例としての産業用ロボットの構成について説明する。
第4の実施形態では、上述の実施形態の振動波モータを少なくとも2つ以上備える装置の一例として、雲台装置(電子機器)の構成について説明する。なお、電子機器は、雲台装置に限られず、被駆動部材と、当該被駆動部材を駆動する振動波モータとして、上述の実施形態の振動波モータを有するあらゆる電子機器が含まれる。
3,13,23 接触部材(接触体、接触体の他の一部)
4,14 ばね受け部材(接触体、接触体の他の一部)
5,15,25 加圧部材(接触体、接触体の一部)
8,18,28 出力部(軸体)
7,17,27 止めねじ(固定部材)
Claims (16)
- 振動体と、
前記振動体に接触する接触体と、
前記接触体と固定された軸体と、
前記接触体と前記軸体を、前記軸体側から固定する固定部材と、を有し、
前記接触体の一部は、前記軸体の軸方向における位置を前記軸体に対して位置決めする位置決め部材を有するとともに、前記軸体の周方向における位置及び前記軸体の軸方向における位置のうち、前記軸体の周方向における位置及び前記軸体の軸方向における位置が共に前記軸体に対して固定されており、
前記接触体の他の一部は、前記軸体の周方向における位置及び前記軸体の軸方向における位置のうち、前記軸体の周方向における位置のみが前記軸体に対して固定されており、
前記位置決め部材は、前記接触体の一部に設けられた第1の凹部の底面に接触するように、前記第1の凹部に収納されていることを特徴とする振動波モータ。 - 前記接触体の一部は、前記接触体の他の一部が前記振動体に接触するように、前記接触体の他の一部を、前記軸体の軸方向に加圧する加圧部材を有し、
前記加圧部材は、前記接触体の他の一部に設けられた第2の凹部の底面に接触するように、前記第2の凹部に収納されていることを特徴とする請求項1に記載の振動波モータ。 - 前記固定部材は、前記加圧部材の端面よりも前記振動体の側で、前記接触体と前記軸体を固定することを特徴とする請求項2に記載の振動波モータ。
- 前記接触体の一部は、弾性部材を有し、
前記加圧部材は、前記弾性部材を介して、前記第2の凹部の底面に接触していることを特徴とする請求項3に記載の振動波モータ。 - 中空部と周方向に延在する外周面とを有し軸方向に延在する軸体と、
前記軸体が貫通される第1の穴部が設けられた環状の振動体と、
前記軸体が貫通される第2の穴部が設けられ前記振動体と接触する環状の接触部と、前記軸体が配置される第3の穴部を形成する内周面を有するとともに前記接触部を前記軸方向において前記振動体の側に加圧する環状の加圧部と、を含む環状の接触体と、
前記中空部の側から前記軸体に螺合されるとともに前記軸体の前記外周面から突出した先端が前記加圧部の前記内周面に当接することで前記軸方向の所定位置において前記加圧部と前記軸体とを固定する固定部材と、を有する振動波モータ。 - 前記固定部材は、前記軸方向における前記加圧部と前記軸体との固定位置が調整可能なように前記内周面に当接されることで、前記加圧部と前記軸体とを固定する請求項5に記載の振動波モータ。
- 前記固定部材は、前記軸体の周方向に複数設けられためねじ部に螺合され、前記軸体から前記径方向外側に向けて前記加圧部を当接することで、前記加圧部と前記軸体とを固定する請求項5に記載の振動波モータ。
- 前記外周面と前記内周面とは、はめあいの関係をみたして配置され、
前記固定部材は、前記径方向外側に向かって前記外周面を超えて前記内周面を当接する請求項5に記載の振動波モータ。 - 前記加圧部は、前記振動部を加圧する加圧ばね部と、前記加圧ばね部と固定されるとともに前記内周面を含むばね規制部と、を有する請求項5に記載の振動波モータ。
- 前記固定部材は、前記ばね規制部が備える前記内周面と当接することで、前記軸方向における所定位置に前記加圧部を固定する請求項9に記載の振動波モータ。
- 前記振動体の振動によって、前記接触体が前記軸体の周方向に回転されると共に、前記軸体が軸回転されることを特徴とする請求項1乃至10のいずれか1項に記載の振動波モータ。
- 前記軸体は中空部を有し、
前記固定部材は、前記接触体と前記軸体を、前記中空部側から固定することを特徴とする請求項1乃至11のいずれか1項に記載の振動波モータ。 - 少なくとも2つのリンク部材と、
請求項1乃至12のいずれか1項に記載の振動波モータによって、前記2つのリンク部材の交差角度を変更することができる第1のジョイント部材と、を有することを特徴とするロボットアーム。 - リンク部材と、
把持部材と、
請求項1乃至13のいずれか1項に記載の振動波モータによって、前記把持部材を前記リンク部材に対して軸回転することができる第2のジョイント部材と、を有することを特徴とするロボットアーム。 - 撮像装置を支持する支持部材と、
前記支持部材を駆動する、請求項1乃至14のいずれか1項に記載の振動波モータと、を有することを特徴とする雲台装置。 - 被駆動部材と、
前記被駆動部材を駆動する、請求項1乃至15のいずれか1項に記載の振動波モータと、を有する、ことを特徴とする電子機器。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018225865A JP7195900B2 (ja) | 2018-11-30 | 2018-11-30 | 振動波モータ及びそれを有する電子機器 |
| US16/688,248 US11522474B2 (en) | 2018-11-30 | 2019-11-19 | Vibration wave motor and electronic apparatus including the vibration wave motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018225865A JP7195900B2 (ja) | 2018-11-30 | 2018-11-30 | 振動波モータ及びそれを有する電子機器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020089236A JP2020089236A (ja) | 2020-06-04 |
| JP2020089236A5 JP2020089236A5 (ja) | 2021-11-11 |
| JP7195900B2 true JP7195900B2 (ja) | 2022-12-26 |
Family
ID=70850901
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018225865A Active JP7195900B2 (ja) | 2018-11-30 | 2018-11-30 | 振動波モータ及びそれを有する電子機器 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11522474B2 (ja) |
| JP (1) | JP7195900B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7512103B2 (ja) | 2020-07-13 | 2024-07-08 | キヤノン株式会社 | 振動型アクチュエータ及び機器 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016010254A (ja) | 2014-06-25 | 2016-01-18 | キヤノン株式会社 | 振動型アクチュエータ、ロボット及び画像形成装置 |
| JP2018108016A (ja) | 2016-12-27 | 2018-07-05 | キヤノン株式会社 | 駆動装置、その制御方法、振動波モータ装置、および撮像装置 |
| JP2018185005A (ja) | 2017-04-26 | 2018-11-22 | 株式会社荏原製作所 | ライナーリングおよび遠心ポンプ |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4576214B2 (ja) * | 2004-11-26 | 2010-11-04 | オリンパスイメージング株式会社 | 超音波モータおよびレンズ鏡筒 |
| WO2013051168A1 (ja) * | 2011-10-03 | 2013-04-11 | Serendipity株式会社 | 撮像装置および硬性内視鏡 |
| JP2017070115A (ja) | 2015-09-30 | 2017-04-06 | キヤノン株式会社 | 振動型アクチュエータ、振動型アクチュエータの駆動方法、レンズ鏡筒、撮像装置及びステージ装置 |
| US11496070B2 (en) | 2016-12-27 | 2022-11-08 | Canon Kabushiki Kaisha | Driving apparatus that drives pan head apparatus, control method therefor, vibration-wave motor apparatus, and image pickup apparatus |
-
2018
- 2018-11-30 JP JP2018225865A patent/JP7195900B2/ja active Active
-
2019
- 2019-11-19 US US16/688,248 patent/US11522474B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016010254A (ja) | 2014-06-25 | 2016-01-18 | キヤノン株式会社 | 振動型アクチュエータ、ロボット及び画像形成装置 |
| JP2018108016A (ja) | 2016-12-27 | 2018-07-05 | キヤノン株式会社 | 駆動装置、その制御方法、振動波モータ装置、および撮像装置 |
| JP2018185005A (ja) | 2017-04-26 | 2018-11-22 | 株式会社荏原製作所 | ライナーリングおよび遠心ポンプ |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200177107A1 (en) | 2020-06-04 |
| US11522474B2 (en) | 2022-12-06 |
| JP2020089236A (ja) | 2020-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7195900B2 (ja) | 振動波モータ及びそれを有する電子機器 | |
| KR19980064658A (ko) | 진동형구동장치 | |
| US10917024B2 (en) | Vibration-type drive apparatus, robot, image forming apparatus, and image pickup apparatus that inhibit undesired vibration | |
| US11689121B2 (en) | Vibration wave motor having pressing parts separated by slits and turning apparatus incorporating the same | |
| JP5932402B2 (ja) | 振動波駆動装置 | |
| EP1381092B1 (en) | Vibration type drive unit | |
| WO2016002917A1 (ja) | 振動型アクチュエータ、レンズ鏡筒、撮像装置及び自動ステージ | |
| JP6184063B2 (ja) | 振動波駆動装置および電子機器 | |
| JP2017201192A (ja) | 減速装置および光学機器 | |
| JP7512103B2 (ja) | 振動型アクチュエータ及び機器 | |
| JP6716959B2 (ja) | 減速装置および光学機器 | |
| JP4844135B2 (ja) | 振動アクチュエータ装置、レンズ鏡筒及びカメラシステム | |
| JP2004140941A (ja) | 複自由度駆動装置 | |
| JP6611446B2 (ja) | 振動型駆動装置及び撮像装置 | |
| JP2002354849A (ja) | 振動波駆動装置及び振動波駆動装置を備えた装置 | |
| JP7183225B2 (ja) | 振動型駆動装置および撮像装置 | |
| JP2577118B2 (ja) | 振動波駆動装置 | |
| JP2023068228A (ja) | 駆動装置及びロボット | |
| JP2012231611A (ja) | 振動波モータ | |
| JP4784154B2 (ja) | 振動アクチュエータ | |
| JP6229457B2 (ja) | 振動アクチュエータ及び光学機器 | |
| JPH0898566A (ja) | 振動波モータおよび振動波モータを駆動源とする装置 | |
| JPH10290584A (ja) | 超音波モータ | |
| JPH10201257A (ja) | 振動波モータを駆動源とする装置 | |
| JPH07184378A (ja) | 超音波モータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210930 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210930 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220720 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220726 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220922 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221214 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7195900 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |