以下、本発明を具体化した実施形態を図面に基づいて説明する。
[第1実施形態]
(垂直多関節ロボットの構成)
図1~図16を参照して、本発明の第1実施形態による垂直多関節ロボット100の構成について説明する。
垂直多関節ロボット100は、図1に示すように、6の自由度を有する6軸ロボットである。垂直多関節ロボット100は、ベース部100aを介して、床などの設置面に設置されるように構成されている。
垂直多関節ロボット100は、複数(6つ)のアーム部1~6と、複数のアーム部1~6を回転駆動する複数(6つ)の関節軸部10~60とを備えている。複数のアーム部1~6は、第1アーム部1、第2アーム部2、第3アーム部3、第4アーム部4、第5アーム部5および第6アーム部6を含んでいる。また、複数の関節軸部10~60は、第1関節軸部10、第2関節軸部20、第3関節軸部30、第4関節軸部40、第5関節軸部50および第6関節軸部60を含んでいる。なお、第5関節軸部50および第6関節軸部60は、それぞれ、請求の範囲の「先端前関節軸部」および「先端関節軸部」の一例である。
第1関節軸部10は、鉛直方向(Z方向)に沿った方向に延びる回転軸線A1周りに、第1アーム部1を回転駆動するように構成されている。第1アーム部1は、第1関節軸部10と第2関節軸部20とを連結するように構成されている。第2関節軸部20は、第2アーム部2が延びる方向と直交する幅方向(X方向、水平方向)に沿った方向に延びる回転軸線A2周りに、第2アーム部2を回転駆動するように構成されている。第2アーム部2は、第2関節軸部20と第3関節軸部30とを連結するように構成されている。第3関節軸部30は、第3アーム部3が延びる方向と直交する幅方向(X方向、水平方向)に沿った方向に延びる回転軸線A3周りに、第3アーム部3を回転駆動するように構成されている。第3アーム部3は、第3関節軸部30と第4関節軸部40とを連結するように構成されている。
第4関節軸部40は、第4アーム部4が延びる方向(Y方向)に沿った方向に延びる回転軸線A4周りに、第4アーム部4を回転駆動するように構成されている。第4アーム部4は、第4関節軸部40と第5関節軸部50とを連結するように構成されている。第5関節軸部50は、水平方向(X方向)に沿った方向に延びる回転軸線A5周りに、第5アーム部5を回転駆動するように構成されている。第5アーム部5は、第5関節軸部50と第6関節軸部60とを連結するように構成されている。第6関節軸部60は、回転軸線A5に直交する方向(Y方向)に沿った方向に延びる回転軸線A6周りに、第6アーム部6を回転駆動するように構成されている。第6アーム部6は、ツールフランジであり、ツール6a(エンドエフェクタ)が取り付けられるように構成されている。第5関節軸部50、第5アーム部5、第6関節軸部60および第6アーム部6は、手首構造に対応する。
ここで、第1実施形態では、図2に示すように、垂直多関節ロボット100は、組立および整備を容易化するためにユニット化されている。具体的には、垂直多関節ロボット100は、第1関節軸部ユニット10aと、第2関節軸部ユニット20aと、第3関節軸部ユニット30aと、第4関節軸部ユニット40aと、第5、6関節軸部ユニット50aとを備えている。また、垂直多関節ロボット100は、第2関節軸部配線ユニット70aと、第4関節軸部配線ユニット80aとを備えている。また、垂直多関節ロボット100は、第2関節軸部配線ユニット70aに取り付けられるカバー70bと、第4関節軸部配線ユニット80aおよび第5、6関節軸部ユニット50aに取り付けられる副アーム部80bおよびカバー80cとを備えている。垂直多関節ロボット100は、ユニット単位で、交換を行うことが可能なように構成されている。
なお、第1関節軸部ユニット10a、第2関節軸部ユニット20a、第3関節軸部ユニット30a、第4関節軸部ユニット40aおよび第5、6関節軸部ユニット50aは、請求の範囲の「関節軸部ユニット」の一例である。また、第5、6関節軸部ユニット50aは、請求の範囲の「先端関節軸部ユニット」の一例である。第2関節軸部配線ユニット70aおよび第4関節軸部配線ユニット80aは、請求の範囲の「配線ユニット」の一例である。
(第1関節軸部ユニットの構成)
図2~図4に示すように、第1関節軸部10は、第1関節軸部10と、第1アーム部1と、ベース体10bとを一体的に含む第1関節軸部ユニット10aを形成するように構成されている。第1関節軸部ユニット10aは、第1関節軸部10と、第1アーム部1と、ベース体10bとを一体的に含む状態で、取り付けおよび取り外しが可能なように構成されている。
第1関節軸部10は、モータ11と、減速機12とを含んでいる。なお、モータ11および減速機12は、それぞれ、請求の範囲の「第1モータ」および「第1減速機」の一例である。
モータ11は、第1アーム部1を回転駆動するための駆動力を発生するように構成されている。モータ11は、図示しないねじなどの固定具により、ベース体10bに取り付けられている。モータ11は、筺体11aと、中実のモータシャフト11bとを含んでいる。筺体11aは、固定子、回転子、ブレーキなどを収容するように構成されている。すなわち、モータ11は、ブレーキを筺体11a内に含む、ブレーキ付モータである。モータシャフト11bは、モータ11の出力軸であり、回転軸線A1の延びる方向(Z方向)に沿った方向に延びるように構成されている。モータシャフト11bは、減速機12に直結されている。なお、モータシャフト11bは、請求の範囲の「第1モータシャフト」の一例である。
減速機12は、モータ11と同軸に配置されているとともに、モータ11のモータシャフト11bに直結されている。減速機12は、ウェーブジェネレータ12aと、フレクススプライン12bと、サーキュラスプライン12cとを含む波動歯車減速機である。ウェーブジェネレータ12aは、減速機12の入力部であり、モータシャフト11bが連結用の貫通孔112aに挿入された状態で、キーとセットスクリュとにより、モータシャフト11bに連結されている。フレクススプライン12bは、減速機12の出力部であり、第1アーム部1に連結されている。サーキュラスプライン12cは、減速機12の固定部であり、ベース体10bに取り付けられている。また、減速機12は、軸受部12dを含んでいる。軸受部12dは、サーキュラスプライン12cに対してフレクススプライン12bを回転可能に保持している。軸受部12dは、クロスローラベアリングである。
また、ウェーブジェネレータ12aは、回転中心にモータシャフト11bの挿入用の貫通孔112aを有する楕円型の円盤形状を有している。ウェーブジェネレータ12aは、フレクススプライン12bの後述する円筒部112bに圧入されている。フレクススプライン12bは、円筒部112bと、フランジ部112cとを有している。円筒部112bは、中空形状を有し、回転軸線A1の延びる方向(Z方向)に沿った方向に延びるように構成されている。円筒部112bは、サーキュラスプライン12cの内歯と噛み合う外歯を有している。フランジ部112cは、円環形状を有し、円筒部112bのモータ11側とは反対側(Z1方向側)の端部から、外側(回転中心から離れる側)に延びるように構成されている。サーキュラスプライン12cは、円環形状を有するとともに、フレクススプライン12bの外歯と噛み合う内歯を有している。
減速機12の出力部であるフレクススプライン12bは、フランジ部112cにおいて、図示しないねじなどの固定具により、第1アーム部1に取り付けられている。また、減速機12の固定部であるサーキュラスプライン12cは、ねじなどの固定具7aにより、ベース体10bに取り付けられている。
第1関節軸部ユニット10aは、中実のモータシャフト11bを含むモータ11と、モータ11に直結される減速機12とを一体的に含んでいる。具体的には、第1関節軸部ユニット10aは、モータ11と、減速機12と、第1アーム部1と、ベース体10bとを一体的に含んでいる。
ベース体10bは、第1関節軸部10のモータ11と、減速機12とを収容するように構成されている。また、ベース体10bは、Z2方向側の端部にベース部100aを有している。また、ベース体10bは、配線配置部13を内部に有している。配線配置部13は、第1関節軸部10のモータ11を取り囲むように配置されている。配線配置部13は、配線部8の第1部分8aをベース体10bと区画して保持するように構成されている。配線部8の第1部分8aは、配線部8の後述する第2部分8b(図6など参照)に接続されている。
配線部8は、たとえば、信号線、動力線、通信線などの配線と、ハンドなどのツール6aを駆動するためのエアを供給するエア配管とを含んでいる。また、配線部8は、信号線、動力線、通信線などの配線と、エア配管とを収容する配線収容チューブを含んでいる。配線部8は、配線およびエア配管が配線収容チューブに収容された状態で配置されている。
配線配置部13は、配線部8の第1部分8aの擦れを抑制するために、低摩擦の樹脂材料により構成されている。配線配置部13には、配線部8の第1部分8aが折り返し部分を有するように配置されている。具体的には、配線配置部13には、配線部8の第1部分8aが、Y方向から見て、U字状に配置されている。また、配線配置部13は、可動側部分13aと、固定側部分13bとを有している。可動側部分13aは、固定側部分13bに対して第1アーム部1側(Z1方向側)に配置されており、第1アーム部1の回転軸線A1周りの回転に応じて動くことが可能なように構成されている。固定側部分13bは、可動側部分13aに対して第1アーム部1側とは反対側(Z2方向側)に配置されており、動かないようにベース体10bに固定されている。
また、図2に示すように、ベース体10bには、配線コネクタ付カバー10cが着脱可能に設けられている。配線コネクタ付カバー10cは、信号線、動力線、通信線、エア配管などの配線部8のための複数のコネクタ10dを有している。また、第1アーム部1には、配線整備用カバー10eが着脱可能に設けられている。配線整備用カバー10eは、第1アーム部1から取り外された場合、配線部8の第1部分8aおよび第2部分8b、後述するモータ21などを外部に露出させるように構成されている。これにより、配線部8の第1部分8aと第2部分8bとの配線接続作業、配線部8とモータ21との配線接続作業などの配線作業を容易に行うことができる。
(第2関節軸部ユニットの構成)
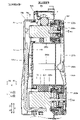
図2、図5および図6に示すように、第2関節軸部ユニット20aは、第2関節軸部20のモータ21と、減速機22と、ブレーキ23と、オイルシール24と、保持部材25とを一体的に含むモータユニットである。第2関節軸部ユニット20aは、モータ21と、減速機22と、ブレーキ23と、オイルシール24と保持部材25とを一体的に含む状態で、取り付けおよび取り外しが可能なように構成されている。なお、モータ21および減速機22は、それぞれ、請求の範囲の「第1モータ」および「第1減速機」の一例である。
モータ21は、第2アーム部2を回転駆動するための駆動力を発生するように構成されている。モータ21は、筺体21aと、中実のモータシャフト21bとを含んでいる。筺体21aは、固定子、回転子などを収容するように構成されている。一方、筺体21aは、ブレーキおよびオイルシールを収容しないように構成されている。すなわち、モータ21は、ブレーキおよびオイルシールを筺体21a内に含まない、ブレーキ、オイルシールなしモータである。このため、モータ21の筺体21aは、ブレーキ、オイルシールを筺体内に含む、ブレーキ、オイルシール付モータの筺体に比べて、軸方向(X方向)の長さが小さい。モータシャフト21bは、モータ21の出力軸であり、回転軸線A2の延びる方向(X方向)に沿った方向に延びるように構成されている。モータシャフト21bは、減速機22に直結されている。なお、モータシャフト21bは、請求の範囲の「第1モータシャフト」の一例である。
減速機22は、モータ21と同軸に配置されているとともに、モータ21のモータシャフト21bに直結されている。減速機22は、ウェーブジェネレータ22aと、フレクススプライン22bと、サーキュラスプライン22cとを含む波動歯車減速機である。ウェーブジェネレータ22aは、減速機22の入力部であり、モータシャフト21bが連結用の貫通孔122aに挿入されることにより、モータシャフト21bに連結されている。フレクススプライン22bは、減速機22の固定部であり、保持部材25を介して第1アーム部1に取り付けられている。サーキュラスプライン22cは、減速機22の出力部であり、保持部材26を介して第2アーム部2に連結されている。また、減速機22は、軸受部22dを含んでいる。軸受部22dは、フレクススプライン22bに対してサーキュラスプライン22cを回転可能に保持している。軸受部22dは、クロスローラベアリングである。
また、ウェーブジェネレータ22aは、回転中心にモータシャフト21bの挿入用の貫通孔122aを有する楕円型の円盤形状を有している。ウェーブジェネレータ22aは、フレクススプライン22bの後述する円筒部122bに圧入されている。フレクススプライン22bは、円筒部122bと、フランジ部122cとを有している。円筒部122bは、中空形状を有し、回転軸線A2の延びる方向(X方向)に沿った方向に延びるように構成されている。円筒部122bは、サーキュラスプライン22cの内歯と噛み合う外歯を有している。フランジ部122cは、円環形状を有し、円筒部122bのモータ21側(X2方向側)の端部から、外側(回転中心から離れる側)に延びるように構成されている。サーキュラスプライン22cは、円環形状を有するとともに、フレクススプライン22bの外歯と噛み合う内歯を有している。
減速機22の固定部であるフレクススプライン22bは、フランジ部122cにおいて、図示しないねじなどの固定具により、保持部材25に取り付けられている。保持部材25は、ねじなどの固定具7cにより、第1アーム部1に取り付けられている。また、減速機22の出力部であるサーキュラスプライン22cには、グリス漏れを防止するための保持部材26が設けられている。サーキュラスプライン22cは、保持部材26を介して、図示しないねじなどの固定具により、第2アーム部2に取り付けられている。
ブレーキ23は、モータ21を保持するように構成されている。ブレーキ23は、非通電時にモータ21を保持するとともに、通電時にモータ21の保持を解除する無励磁作動型の電磁ブレーキである。ブレーキ23のブレーキハブ23aは、モータシャフト21bに圧入されることにより、モータシャフト21bの根元部に取り付けられている。ブレーキ23の本体部23bは、ねじなどの固定具7bにより、保持部材25のブレーキ保持部25aに取り付けられている。オイルシール24は、減速機22のグリスをシールするように構成されている。オイルシール24は、モータシャフト21bに装着されている。また、オイルシール24は、保持部材25のオイルシール保持部25bに保持されている。
ブレーキ23およびオイルシール24は、モータ21とは別個に、モータ21の筺体21a外に設けられている。ブレーキ23およびオイルシール24は、回転軸線A2の延びる方向(X方向)に沿った方向において、モータ21の筺体21aと、減速機22のウェーブジェネレータ22aとの間に配置されている。ブレーキ23およびオイルシール24は、減速機22のウェーブジェネレータ22aに対してモータ21側(X2方向側)に配置されている。ブレーキ23およびオイルシール24は、モータ21側(X2方向側)から減速機22側(X1方向側)に向かって、この順に配置されている。
保持部材25は、モータ21、減速機22、ブレーキ23およびオイルシール24を一体的に保持するように構成されている。具体的には、モータ21は、図示しないねじなどの固定具により、保持部材25に取り付けられている。また、減速機22は、図示しないねじなどの固定具により、保持部材25に取り付けられている。また、ブレーキ23は、ねじなどの固定具7bにより、保持部材25のブレーキ保持部25aに取り付けられている。また、オイルシール24は、保持部材25のオイルシール保持部25bに保持されている。第2関節軸部ユニット20aは、モータ21と、減速機22と、ブレーキ23と、オイルシール24と、保持部材25とを一体的に含む状態で、ねじなどの固定具7cにより、保持部材25を介して、第1アーム部1に取り付けられるとともに、保持部材26を介して、第2アーム部2に取り付けられるように構成されている。
ここで、減速機22は、回転軸線A2の延びる方向(X方向)に沿った方向に窪む凹部22eを有している。凹部22eは、少なくともウェーブジェネレータ22aと、フレクススプライン22bと、サーキュラスプライン22cと、軸受部22dとにより形成されている。具体的には、凹部22eの底部は、ウェーブジェネレータ22aにより形成されている。また、凹部22eの側部は、フレクススプライン22bと、サーキュラスプライン22cと、軸受部22dとにより形成されている。減速機22は、モータ21側(X2方向側)に凹部22eを有している。すなわち、凹部22eは、モータ21側(X2方向側)から減速機22側(X1方向側)に向かって窪むように形成されている。
また、ブレーキ23の少なくとも一部(X1方向側の部分)およびオイルシール24は、凹部22eの内側に配置されている。すなわち、ブレーキ23の少なくとも一部およびオイルシール24は、凹部22eの内側に収まるように配置されている。これにより、凹部22eを利用してブレーキ23の少なくとも一部およびオイルシール24を配置することができるので、第2関節軸部ユニット20aにブレーキ付モータを用いる場合に比べて、第2関節軸部ユニット20aを軸方向(X方向)に小型化することができる。ブレーキ23の少なくとも一部およびオイルシール24は、回転軸線A2の延びる方向に直交する方向(Y方向、Z方向など)に沿った方向に見て、凹部22e(フレクススプライン22bの円筒部122bおよび軸受部22d)にオーバーラップするように配置されている。
同様に、保持部材25のブレーキ保持部25aおよびオイルシール保持部25bが、凹部22eの内側に配置されている。すなわち、ブレーキ保持部25aおよびオイルシール保持部25bが、凹部22eの内側に収まるように配置されている。ブレーキ保持部25aおよびオイルシール保持部25bが、回転軸線A2の延びる方向に直交する方向(Y方向、Z方向など)に沿った方向に見て、凹部22e(フレクススプライン22bの円筒部122bおよび軸受部22d)にオーバーラップするように配置されている。
(第3関節軸部ユニットの構成)
図2、図7および図8に示すように、第3関節軸部ユニット30aは、第3関節軸部30のモータ31と、減速機32と、ブレーキ33と、オイルシール34と、保持部材35とを一体的に含むモータユニットである。第3関節軸部ユニット30aは、モータ31と、減速機32と、ブレーキ33と、オイルシール34と保持部材35とを一体的に含む状態で、取り付けおよび取り外しが可能なように構成されている。なお、モータ31および減速機32は、それぞれ、請求の範囲の「第1モータ」および「第1減速機」の一例である。
モータ31は、第3アーム部3を回転駆動するための駆動力を発生するように構成されている。モータ31は、図示しないねじなどの固定具により、保持部材36に取り付けられている。また、モータ31は、保持部材36を介して、ねじなどの固定具7dにより、保持部材35に取り付けられている。また、保持部材35は、第3アーム部3に取り付けられている。また、モータ31は、筺体31aと、中実のモータシャフト31bとを含んでいる。筺体31aは、固定子、回転子などを収容するように構成されている。一方、筺体31aは、ブレーキおよびオイルシールを収容しないように構成されている。すなわち、モータ31は、ブレーキおよびオイルシールを筺体31a内に含まない、ブレーキ、オイルシールなしモータである。このため、モータ31の筺体31aは、ブレーキ、オイルシールを筺体内に含む、ブレーキ、オイルシール付モータの筺体に比べて、軸方向(X方向)の長さが小さい。モータシャフト31bは、モータ31の出力軸であり、回転軸線A3の延びる方向(X方向)に沿った方向に延びるように構成されている。モータシャフト31bは、減速機32に直結されている。なお、モータシャフト31bは、請求の範囲の「第1モータシャフト」の一例である。
減速機32は、モータ31と同軸に配置されているとともに、モータ31のモータシャフト31bに直結されている。減速機32は、ウェーブジェネレータ32aと、フレクススプライン32bと、サーキュラスプライン32cとを含む波動歯車減速機である。ウェーブジェネレータ32aは、減速機32の入力部であり、モータシャフト31bが連結用の貫通孔132aに挿入されることにより、モータシャフト31bに連結されている。フレクススプライン32bは、減速機32の出力部であり、第3アーム部3に連結されている。サーキュラスプライン32cは、減速機32の固定部であり、フレクススプライン32bに取り付けられている。また、減速機32は、軸受部32dを含んでいる。軸受部32dは、サーキュラスプライン32cに対してフレクススプライン32bを回転可能に保持している。軸受部32dは、クロスローラベアリングである。
また、ウェーブジェネレータ32aは、回転中心にモータシャフト31bの挿入用の貫通孔132aを有する楕円型の円盤形状を有している。ウェーブジェネレータ32aは、フレクススプライン32bの後述する円筒部132bに圧入されている。フレクススプライン32bは、円筒部132bと、フランジ部132cとを有している。円筒部132bは、中空形状を有し、回転軸線A3の延びる方向(X方向)に沿った方向に延びるように構成されている。円筒部132bは、サーキュラスプライン32cの内歯と噛み合う外歯を有している。フランジ部132cは、円環形状を有し、円筒部132bのモータ21側(X2方向側)の端部から、外側(回転中心から離れる側)に延びるように構成されている。サーキュラスプライン32cは、円環形状を有するとともに、フレクススプライン32bの外歯と噛み合う内歯を有している。
減速機32の出力部であるフレクススプライン32bは、フランジ部132cにおいて、保持部材35を介して、図示しないねじなどの固定具により、第3アーム部3に取り付けられている。また、減速機32の固定部であるサーキュラスプライン32cは、グリス漏れを防止するための保持部材37を介して、図示しないねじなどの固定具により、第2アーム部2に取り付けられている。
ブレーキ33は、モータ31を保持するように構成されている。ブレーキ33は、非通電時にモータ31を保持するとともに、通電時にモータ31の保持を解除する無励磁作動型の電磁ブレーキである。ブレーキ33のブレーキハブ33aは、セットスクリュにより、モータシャフト31bの根元部に取り付けられている。ブレーキ33の本体部33bは、図示しないねじなどの固定具により、保持部材35のブレーキ保持部35aに取り付けられている。オイルシール34は、減速機32のグリスをシールするように構成されている。オイルシール34は、モータシャフト31bに装着されている。また、オイルシール34は、保持部材35のオイルシール保持部35bに保持されている。
ブレーキ33およびオイルシール34は、モータ31とは別個に、モータ31の筺体31a外に設けられている。ブレーキ33およびオイルシール34は、回転軸線A3の延びる方向(X方向)に沿った方向において、モータ31の筺体31aと、減速機32のウェーブジェネレータ32aとの間に配置されている。ブレーキ33およびオイルシール34は、減速機32のウェーブジェネレータ32aに対してモータ31側(X2方向側)に配置されている。ブレーキ33およびオイルシール34は、モータ31側(X2方向側)から減速機32側(X1方向側)に向かって、この順に配置されている。
保持部材35は、モータ31、減速機32、ブレーキ33およびオイルシール34を一体的に保持するように構成されている。具体的には、モータ31は、保持部材36を介して、ねじなどの固定具7dにより、保持部材35に取り付けられている。また、減速機32は、ねじなどの固定具7eにより、保持部材35に取り付けられている。また、ブレーキ33は、図示しないねじなどの固定具により、保持部材35のブレーキ保持部35aに取り付けられている。また、オイルシール34は、保持部材35のオイルシール保持部35bに保持されている。第3関節軸部ユニット30aは、モータ31と、減速機32と、ブレーキ33と、オイルシール34と、保持部材35とを一体的に含む状態で、図示しないねじなどの固定具により、保持部材35を介して、第3アーム部3に取り付けられるとともに、保持部材37を介して第2アーム部2に取り付けられるように構成されている。
ここで、減速機32は、回転軸線A3の延びる方向(X方向)に沿った方向に窪む凹部32eを有している。凹部32eは、少なくともウェーブジェネレータ32aと、フレクススプライン32bと、サーキュラスプライン32cと、軸受部32dとにより形成されている。具体的には、凹部32eの底部は、ウェーブジェネレータ32aにより形成されている。また、凹部32eの側部は、フレクススプライン32bと、サーキュラスプライン32cと、軸受部32dとにより形成されている。減速機32は、モータ31側(X2方向側)に凹部32eを有している。すなわち、凹部32eは、モータ31側(X2方向側)から減速機32側(X1方向側)に向かって窪むように形成されている。
また、ブレーキ33の少なくとも一部(X1方向側の部分)およびオイルシール34は、凹部32eの内側に配置されている。すなわち、ブレーキ33の少なくとも一部およびオイルシール34は、凹部32eの内側に収まるように配置されている。これにより、凹部32eを利用してブレーキ33の少なくとも一部およびオイルシール34を配置することができるので、第3関節軸部ユニット30aにブレーキ付モータを用いる場合に比べて、第3関節軸部ユニット30aを軸方向(X方向)に小型化することができる。ブレーキ33の少なくとも一部およびオイルシール34は、回転軸線A3の延びる方向に直交する方向(Y方向、Z方向など)に沿った方向に見て、凹部32e(フレクススプライン32bの円筒部132bおよび軸受部32d)にオーバーラップするように配置されている。
同様に、保持部材35のブレーキ保持部35aおよびオイルシール保持部35bが、凹部32eの内側に配置されている。すなわち、ブレーキ保持部35aおよびオイルシール保持部35bが、凹部32eの内側に収まるように配置されている。ブレーキ保持部35aおよびオイルシール保持部35bが、回転軸線A3の延びる方向に直交する方向(Y方向、Z方向など)に沿った方向に見て、凹部32e(フレクススプライン32bの円筒部132bおよび軸受部32d)にオーバーラップするように配置されている。
(第2関節軸部配線ユニットの構成)
図2、図9および図10に示すように、第2関節軸部配線ユニット70aは、配線部8の第2部分8bが配置されるように構成されている。配線部8の第2部分8bは、第1端が配線部8の第1部分8a(図4参照)に接続されるとともに、第2端が配線部8の後述する第3部分8c(図13参照)に接続されている。配線部8の第2部分8bの第1端は、第2関節軸部配線ユニット70aの開口部71を介して、第1アーム部1内に挿入されて配置されている。また、配線部8の第2部分8bの第2端は、第2関節軸部配線ユニット70aの開口部72を介して、第3アーム部3内に挿入されて配置されている。
第2関節軸部配線ユニット70aは、配線配置部73と、配線配置部73を保持する外装部74とを一体的に含んでいる。配線配置部73は、配線部8の第2部分8bを外装部74と区画して保持するように構成されている。配線配置部73は、配線部8の第2部分8bの擦れを抑制するために、低摩擦の樹脂材料により構成されている。配線配置部73には、配線部8の第2部分8bが第2アーム部2の延びる方向(Z方向)に沿って延びるように配置されている。また、配線配置部73には、クランプ部73aが設けられている。クランプ部73aは、配線部8の第2部分8bを配線配置部73に固定的に保持するように構成されている。外装部74は、第2関節軸部配線ユニット70aの外装部分を形成するように構成されている。
また、第1実施形態では、第2関節軸部配線ユニット70aは、第2アーム部2を兼ねるように構成されている。具体的には、第2アーム部2は、モータ21の駆動力を受ける第1アーム体2aと、第1アーム体2aに対して対向して配置されるとともに、モータ21の駆動力を受けない第2アーム体2bとを含む一対のアーム体2aおよび2bを含んでいる。第2関節軸部配線ユニット70aは、一対のアーム体2aおよび2bのうち、第2アーム体2bを兼ねるように構成されている。第2関節軸部配線ユニット70aは、外装部74が第2アーム体2bを兼ねるように構成されている。外装部74は、第1アーム体2aと第2アーム体2bとを連結する連結部74aを有している。第1アーム体2aと第2アーム体2bとは、連結部74aを介して互いに連結されている。
また、第2関節軸部配線ユニット70aには、カバー70bが着脱可能に設けられている。カバー70bは、第2関節軸部配線ユニット70aから取り外された場合、配線部8の第2部分8bを外部に露出させるように構成されている。また、カバー70bは、第2関節軸部配線ユニット70aに取り付けられた場合、配線部8の第2部分8bを外部から区画して覆うように構成されている。
(第4関節軸部ユニットの構成)
図2、図11および図12に示すように、第4関節軸部ユニット40aは、第4関節軸部40のモータ41と、減速機42と、配線配置部43と、保持部材44とを一体的に含むモータユニットである。第4関節軸部ユニット40aは、モータ41と、減速機42と、配線配置部43と、保持部材44とを一体的に含む状態で、取り付けおよび取り外しが可能なように構成されている。なお、モータ41および減速機42は、それぞれ、請求の範囲の「第1モータ」および「第1減速機」の一例である。
モータ41は、第4アーム部4を回転駆動するための駆動力を発生するように構成されている。モータ41は、図示しないねじなどの固定具により、保持部材44に取り付けられている。モータ41は、筺体41aと、中実のモータシャフト41bとを含んでいる。筺体41aは、固定子、回転子、ブレーキなどを収容するように構成されている。すなわち、モータ41は、ブレーキを筺体41a内に含む、ブレーキ付モータである。モータシャフト41bは、モータ41の出力軸であり、回転軸線A4の延びる方向(Y方向)に沿った方向に延びるように構成されている。モータシャフト41bは、減速機42に直結されている。なお、モータシャフト41bは、請求の範囲の「第1モータシャフト」の一例である。
減速機42は、モータ41と同軸に配置されているとともに、モータ41のモータシャフト41bに直結されている。減速機42は、ウェーブジェネレータ42aと、フレクススプライン42bと、サーキュラスプライン42cとを含む波動歯車減速機である。ウェーブジェネレータ42aは、減速機42の入力部であり、モータシャフト41bが連結用の貫通孔142aに挿入されることにより、モータシャフト41bに連結されている。フレクススプライン42bは、減速機42の出力部であり、後述する軸受部42dの内輪を介して第4アーム部4に連結されている。サーキュラスプライン42cは、減速機42の固定部であり、図示しないねじなどの固定具により、保持部材44に取り付けられている。また、減速機42は、軸受部42dを含んでいる。軸受部42dは、サーキュラスプライン42cに対してフレクススプライン42bを回転可能に保持している。軸受部42dは、クロスローラベアリングである。
また、ウェーブジェネレータ42aは、回転中心にモータシャフト41bの挿入用の貫通孔442aを有する楕円型の円盤形状を有している。ウェーブジェネレータ42aは、フレクススプライン42bの後述する円筒部142bに圧入されている。フレクススプライン42bは、カップ形状を有し、カップの側部である円筒部142bと、カップの底部142cとを有している。円筒部142bは、中空形状を有し、回転軸線A4の延びる方向(Y方向)に沿った方向に延びるように構成されている。円筒部142bは、サーキュラスプライン42cの内歯と噛み合う外歯を有している。底部142cは、円筒部142bのモータ41側とは反対側(Y1方向側)の端部から、内側(回転中心に近づく側)に延びるように構成されている。サーキュラスプライン42cは、円環形状を有するとともに、フレクススプライン42bの外歯と噛み合う内歯を有している。
減速機42の出力部であるフレクススプライン42bは、底部142cにおいて、図示しないねじなどの固定具により、軸受部42dの内輪を介して第4アーム部4に取り付けられている。また、減速機42の固定部であるサーキュラスプライン42cは、図示しないねじなどの固定具により、保持部材44に取り付けられている。
配線配置部43は、配線部8の第3部分8cを第4アーム部4と区画して保持するように構成されている。配線部8の第3部分8cは、配線部8の第2部分8b(図6など参照)に接続されている。配線配置部43は、固定側部分として構成されている。
保持部材44は、モータ41、減速機42、配線配置部43を一体的に保持するように構成されている。具体的には、モータ41は、図示しないねじなどの固定具により、保持部材44に取り付けられている。また、減速機42は、図示しないねじなどの固定具により、保持部材44に取り付けられている。また、配線配置部43は、保持部材44に取り付けられている。第4関節軸部ユニット40aは、モータ41と、減速機42と、配線配置部43と、保持部材44とを一体的に含む状態で、図示しないねじなどの固定具により、保持部材44を介して、第3アーム部3に取り付けられるように構成されている。
また、図2に示すように、第3アーム部3には、配線整備用カバー30bが着脱可能に設けられている。配線整備用カバー30bは、第3アーム部3から取り外された場合、配線部8の第2部分8bおよび第3部分8c、モータ31、モータ41などを外部に露出させるように構成されている。これにより、配線部8の第2部分8bと第3部分8cとの配線接続作業、配線部8とモータ31およびモータ41との配線接続作業などの配線作業を容易に行うことができる。
(第4関節軸部配線ユニットの構成)
図2、図12および図13に示すように、第4関節軸部配線ユニット80aは、配線部8の第3部分8cが配置されるように構成されている。配線部8の第3部分8cは、第1端が第5、6関節軸部ユニット50aに配置されるとともに、第2端が配線部8の第2部分8b(図6など参照)に接続されている。配線部8の第3部分8cの第1端は、第4関節軸部配線ユニット80aの開口部81および副アーム部80b(図13では図示を省略)を介して、第5、6関節軸部ユニット50a内に挿入されて配置されている。また、配線部8の第3部分8cの第2端は、第4関節軸部配線ユニット80aの開口部82を介して、第3アーム部3内に挿入されて配置されている。
第4関節軸部配線ユニット80aは、配線配置部83と、配線配置部83を保持する外装部84とを一体的に含んでいる。配線配置部83は、配線部8の第3部分8cを外装部84と区画して保持するように構成されている。配線配置部83は、配線部8の第3部分8cの擦れを抑制するために、低摩擦の樹脂材料により構成されている。配線配置部83は、第4関節軸部ユニット40aの配線配置部43と共に、配線部8の第3部分8cが配置されるように構成されている。配線配置部83および配線配置部43には、配線部8の第3部分8cが折り返し部分を有するように配置されている。具体的には、配線配置部83および配線配置部43には、配線部8の第3部分8cが、X方向から見て、U字状に配置されている。また、配線配置部83および配線配置部43は、それぞれ、可動側部分および固定側部分として構成されている。可動側部分としての配線配置部83は、固定側部分としての配線配置部43に対して先端側(Y1方向側)に配置されており、第4アーム部4の回転軸線A4周りの回転に応じて動くことが可能なように構成されている。固定側部分としての配線配置部43は、可動側部分としての配線配置部83に対して先端側とは反対側(Y2方向側)に配置されており、動かないように第4関節軸部ユニット40aの保持部材44に固定されている。外装部84は、第4関節軸部配線ユニット80aの外装部分を形成するように構成されている。
また、第1実施形態では、第4関節軸部配線ユニット80aは、第4アーム部4を兼ねるように構成されている。具体的には、第4関節軸部配線ユニット80aは、外装部84が第4アーム部4を兼ねるように構成されている。外装部84は、配線配置部83を収容する収容部84aと、収容部84aから先端側(Y1方向側)に向かって延びるように設けられ、第5、6関節軸部ユニット50aを回転可能に保持する保持部84bとを有している。
また、図2に示すように、第4関節軸部配線ユニット80aおよび第5、6関節軸部ユニット50aには、副アーム部80bおよびカバー80cが着脱可能に設けられている。副アーム部80bは、第4アーム部4のX2方向側のアーム体として形成されている。カバー80cは、第4関節軸部配線ユニット80aから取り外された場合、配線部8の第3部分8cを外部に露出させるように構成されている。また、カバー80cは、第4関節軸部配線ユニット80aに取り付けられた場合、配線部8の第3部分8cを外部から区画して覆うように構成されている。
(第5、6関節軸部ユニットの構成)
図2および図14~図16に示すように、手首構造に対応する第5関節軸部50および第6関節軸部60は、第5関節軸部50と、第6関節軸部60と、第5アーム部5と、第6アーム部6とを一体的に含む第5、6関節軸部ユニット50aを形成するように構成されている。第5、6関節軸部ユニット50aは、第5関節軸部50と、第6関節軸部60と、第5アーム部5と、第6アーム部6とを一体的に含む状態で、取り付けおよび取り外しが可能なように構成されている。
第5関節軸部50は、モータ51と、減速機52と、ブレーキ53と、オイルシール54とを含んでいる。なお、モータ51および減速機52は、それぞれ、請求の範囲の「第3モータ」および「第3減速機」の一例である。
モータ51は、第5アーム部5を回転駆動するための駆動力を発生するように構成されている。モータ51は、図示しないねじなどの固定具により、第5アーム部5に取り付けられている。モータ51は、筺体51aと、中実のモータシャフト51bとを含んでいる。筺体51aは、固定子、回転子などを収容するように構成されている。一方、筺体51aは、ブレーキおよびオイルシールを収容しないように構成されている。すなわち、モータ51は、ブレーキおよびオイルシールを筺体51a内に含まない、ブレーキ、オイルシールなしモータである。このため、モータ51の筺体51aは、ブレーキ、オイルシールを筺体内に含む、ブレーキ、オイルシール付モータの筺体に比べて、軸方向(X方向)の長さが小さい。モータシャフト51bは、モータ51の出力軸であり、回転軸線A5の延びる方向(X方向)に沿った方向に延びるように構成されている。モータシャフト51bは、減速機52に直結されている。なお、モータシャフト51bは、請求の範囲の「第3モータシャフト」の一例である。
減速機52は、モータ51と同軸に配置されているとともに、モータ51のモータシャフト51bに直結されている。減速機52は、ウェーブジェネレータ52aと、フレクススプライン52bと、サーキュラスプライン52cとを含む波動歯車減速機である。ウェーブジェネレータ52aは、減速機52の入力部であり、モータシャフト51bが連結用の貫通孔152aに挿入されることにより、モータシャフト51bに連結されている。フレクススプライン52bは、減速機52の出力部であり、第5アーム部5に連結されている。サーキュラスプライン52cは、減速機52の固定部であり、第4アーム部4に取り付けられている。また、減速機52は、軸受部52dを含んでいる。軸受部52dは、サーキュラスプライン52cに対してフレクススプライン52bを回転可能に保持している。軸受部52dは、クロスローラベアリングである。
また、ウェーブジェネレータ52aは、回転中心にモータシャフト51bの挿入用の貫通孔152aを有する楕円型の円盤形状を有している。ウェーブジェネレータ52aは、フレクススプライン52bの後述する円筒部152bに圧入されている。フレクススプライン52bは、円筒部152bと、フランジ部152cとを有している。円筒部152bは、中空形状を有し、回転軸線A5の延びる方向(X方向)に沿った方向に延びるように構成されている。円筒部152bは、サーキュラスプライン52cの内歯と噛み合う外歯を有している。フランジ部152cは、円環形状を有し、円筒部152bのモータ51側(X2方向側)の端部から、外側(回転中心から離れる側)に延びるように構成されている。サーキュラスプライン52cは、円環形状を有するとともに、フレクススプライン52bの外歯と噛み合う内歯を有している。
減速機52の出力部であるフレクススプライン52bは、フランジ部152cにおいて、図示しないねじなどの固定具により、第5アーム部5に取り付けられている。また、減速機52の固定部であるサーキュラスプライン52cは、ねじなどの固定具7fにより、第4アーム部4に取り付けられている。
ブレーキ53は、モータ51を保持するように構成されている。ブレーキ53は、非通電時にモータ51を保持するとともに、通電時にモータ51の保持を解除する無励磁作動型の電磁ブレーキである。ブレーキ53のブレーキハブ53aは、セットスクリュにより、モータシャフト51bの中央部に取り付けられている。ブレーキ53の本体部53bは、図示しないねじなどの固定具により、第5アーム部5のブレーキ保持部5aに取り付けられている。オイルシール54は、減速機52のグリスをシールするように構成されている。オイルシール54は、モータシャフト51bに装着されている。また、オイルシール54は、第4アーム部4および第5アーム部5とは別個に設けられたオイルシール保持部9に保持されている。
ブレーキ53およびオイルシール54は、モータ51とは別個に、モータ51の筺体51a外に設けられている。ブレーキ53およびオイルシール54は、回転軸線A5の延びる方向(X方向)に沿った方向において、モータ51の筺体51aと、減速機52のウェーブジェネレータ52aとの間に配置されている。ブレーキ53およびオイルシール54は、減速機52のウェーブジェネレータ52aに対してモータ51側(X2方向側)に配置されている。ブレーキ53およびオイルシール54は、モータ51側(X2方向側)から減速機52側(X1方向側)に向かって、この順に配置されている。
ここで、減速機52は、回転軸線A5の延びる方向(X方向)に沿った方向に窪む凹部52eを有している。凹部52eは、少なくともウェーブジェネレータ52aと、フレクススプライン52bと、サーキュラスプライン52cと、軸受部52dとにより形成されている。具体的には、凹部52eの底部は、ウェーブジェネレータ52aにより形成されている。また、凹部52eの側部は、フレクススプライン52bと、サーキュラスプライン52cと、軸受部52dとにより形成されている。減速機52は、モータ51側(X2方向側)に凹部52eを有している。すなわち、凹部52eは、モータ51側(X2方向側)から減速機52側(X1方向側)に向かって窪むように形成されている。
また、ブレーキ53の少なくとも一部(X1方向側の部分)およびオイルシール54は、凹部52eの内側に配置されている。すなわち、ブレーキ53の少なくとも一部およびオイルシール54は、凹部52eの内側に収まるように配置されている。これにより、凹部52eを利用してブレーキ53の少なくとも一部およびオイルシール54を配置することができるので、第5関節軸部50にブレーキ付モータを用いる場合に比べて、第5、6関節軸部ユニット50aを軸方向(X方向)に小型化することができる。ブレーキ53の少なくとも一部およびオイルシール54は、回転軸線A5の延びる方向に直交する方向(Y方向、Z方向など)に沿った方向に見て、凹部52e(フレクススプライン52bの円筒部152b、サーキュラスプライン52cおよび軸受部52d)にオーバーラップするように配置されている。
同様に、オイルシール保持部9も、凹部52eの内側に配置されている。すなわち、オイルシール保持部9も、凹部52eの内側に収まるように配置されている。オイルシール保持部9も、回転軸線A5の延びる方向に直交する方向(Y方向、Z方向など)に沿った方向に見て、凹部52e(フレクススプライン52bの円筒部152b、サーキュラスプライン52cおよび軸受部52d)にオーバーラップするように配置されている。
第6関節軸部60は、モータ61と、減速機62と、ブレーキ63と、ベルト機構64とを含んでいる。なお、モータ61および減速機62は、それぞれ、請求の範囲の「第2モータ」および「第2減速機」の一例である。
モータ61は、ツールフランジである第6アーム部6を回転駆動するための駆動力を発生するように構成されている。モータ61は、図示しないねじなどの固定具により、第5アーム部5に取り付けられている。モータ61は、筺体61aと、中実のモータシャフト61bとを含んでいる。筺体61aは、固定子、回転子などを収容するように構成されている。一方、筺体61aは、ブレーキを収容しないように構成されている。すなわち、モータ61は、ブレーキを筺体61a内に含まない、ブレーキなしモータである。このため、モータ61の筺体61aは、ブレーキを筺体内に含む、ブレーキ付モータの筺体に比べて、軸方向(Y方向)の長さが小さい。モータシャフト61bは、モータ61の出力軸であり、回転軸線A6の延びる方向(Y方向)に沿った方向に延びるように構成されている。モータシャフト61bは、ベルト機構64を介して減速機62に連結されている。なお、モータシャフト61bは、請求の範囲の「第2モータシャフト」の一例である。
減速機62は、モータ61と軸が重ならないように配置されているとともに、モータ61のモータシャフト61bにベルト機構64を介して連結されている。減速機62は、ウェーブジェネレータ62aと、フレクススプライン62bと、サーキュラスプライン62cとを含む波動歯車減速機である。ウェーブジェネレータ62aは、減速機62の入力部であり、入力軸162aがベルト機構64の後述するプーリ64bに連結されることにより、ベルト機構64を介してモータシャフト61bに連結されている。フレクススプライン62bは、減速機62の出力部であり、第6アーム部6に連結されている。サーキュラスプライン62cは、減速機62の固定部であり、第5アーム部5に取り付けられている。また、減速機62は、軸受部62dを含んでいる。軸受部62dは、サーキュラスプライン62cに対してフレクススプライン62bを回転可能に保持している。軸受部62dは、クロスローラベアリングである。
また、ウェーブジェネレータ62aは、入力軸162aと、円盤部162bとを有している。ウェーブジェネレータ62aは、円盤部162bがフレクススプライン62bの後述する円筒部162cに圧入されている。フレクススプライン62bは、カップ形状を有し、カップの側部である円筒部162cと、カップの底部162dとを有している。円筒部162cは、中空形状を有し、回転軸線A6の延びる方向(Y方向)に沿った方向に延びるように構成されている。円筒部162cは、サーキュラスプライン62cの内歯と噛み合う外歯を有している。底部162dは、円筒部162cのモータ61側とは反対側(Y1方向側)の端部から、内側(回転中心に近づく側)に延びるように構成されている。サーキュラスプライン62cは、円環形状を有するとともに、フレクススプライン62bの外歯と噛み合う内歯を有している。
減速機62の出力部であるフレクススプライン62bは、底部162dにおいて、ねじなどの固定具7gにより、第6アーム部6に取り付けられている。また、減速機62の固定部であるサーキュラスプライン62cは、図示しないねじなどの固定具により、第5アーム部5に取り付けられている。
ブレーキ63は、モータ61を保持するように構成されている。ブレーキ63は、非通電時にモータ61を保持するとともに、通電時にモータ61の保持を解除する無励磁作動型の電磁ブレーキである。ブレーキ63は、モータ61とは別個に、モータ61の筺体61a外に設けられている。ブレーキ63およびモータ61は、モータ51を挟んで、互いに対向するように配置されている。
ベルト機構64は、モータ61による駆動力を減速機62に伝達するように構成されている。また、ベルト機構64は、ブレーキ63による保持力をモータ61に伝達するように構成されている。ベルト機構64は、複数(3つ)のプーリ64a~64cと、複数(2つ)のベルト64dおよび64eとを含んでいる。プーリ64aは、ねじなどの固定具7hにより、モータシャフト61bに取り付けられている。プーリ64bは、ねじなどの固定具7iにより、ウェーブジェネレータ62aの入力軸162aに取り付けられている。プーリ64cは、ねじなどの固定具7jにより、ブレーキ63の入力軸63aに取り付けられている。ベルト64dは、プーリ64aとプーリ64bとの間に掛け渡されている。ベルト64eは、プーリ64bとプーリ64cとの間に掛け渡されている。ベルト機構64の少なくとも一部(プーリ64b、ベルト64d、ベルト64eなど)は、減速機62と、モータ51との間に配置されている。なお、ベルト機構64のY方向の大きさは、モータ61のY方向の大きさよりも小さい。
第5、6関節軸部ユニット50aは、第5関節軸部50のモータ51、減速機52、ブレーキ53およびオイルシール54と、第6関節軸部60のモータ61、減速機62、ブレーキ63およびベルト機構64と、オイルシール保持部9と、第5アーム部5と、第6アーム部6とを一体的に含むように構成されている。また、第5、6関節軸部ユニット50aは、第5関節軸部50のモータ51、減速機52、ブレーキ53およびオイルシール54と、第6関節軸部60のモータ61、減速機62、ブレーキ63およびベルト機構64と、オイルシール保持部9と、第5アーム部5と、第6アーム部6とを一体的に含む状態で、取り付けおよび取り外しが可能なように構成されている。
(垂直多関節ロボットの組立)
次に、図2を参照して、垂直多関節ロボット100の組立方法の一例について説明する。図2に示すように、まず、第1関節軸部ユニット10aの第1アーム部1に、第2関節軸部ユニット20aを取り付ける。そして、第1関節軸部ユニット10aの第1アーム部1に取り付けた第2関節軸部ユニット20aに、第2アーム部2の第1アーム体2aを取り付ける。そして、第3アーム部3に、第3関節軸部ユニット30aを取り付ける。そして、第2関節軸部ユニット20aに取り付けた第2アーム部2の第1アーム体2aに、第3アーム部3に取り付けた第3関節軸部ユニット30aを取り付ける。そして、第1関節軸部ユニット10aの第1アーム部1および第3アーム部3に、第2アーム部2の第2アーム体2bとしての第2関節軸部配線ユニット70aを取り付ける。そして、第2関節軸部配線ユニット70aにカバー70bを取り付ける。
そして、第3アーム部3に、第4関節軸部ユニット40aを取り付ける。そして、第3アーム部3に取り付けた第4関節軸部ユニット40aに、第4関節軸部配線ユニット80aを取り付ける。そして、第4関節軸部ユニット40aに取り付けた第4関節軸部配線ユニット80aに、第5、6関節軸部ユニット50aを取り付ける。そして、第4関節軸部配線ユニット80aおよび第5、6関節軸部ユニット50aに、副アーム部80bおよびカバー80cを取り付ける。これにより、垂直多関節ロボット100の組立が行われる。
また、垂直多関節ロボット100の組立中には、適宜、配線部8の配線作業が行われる。具体的には、配線コネクタ付カバー10cが取り外された状態で、配線部8の第1部分8aとモータ11との配線接続作業、配線部8の第1部分8aとコネクタ10dとの配線接続作業などが行われる。また、配線整備用カバー10eが取り外された状態で、配線部8の第1部分8aと第2部分8bとの配線接続作業、配線部8とモータ21との配線接続作業などが行われる。また、配線整備用カバー30bが取り外された状態で、配線部8の第2部分8bと第3部分8cとの配線接続作業、配線部8とモータ31およびモータ41との配線接続作業などが行われる。また、カバー80cが取り外された状態で、配線部8の第3部分8cとモータ51およびモータ61との配線接続作業などが行われる。配線接続作業の完了後には、各カバーが取り付けられる。
(第1実施形態の効果)
第1実施形態では、以下のような効果を得ることができる。
第1実施形態では、上記のように、配線ユニット70aおよび80aを設けるとともに、関節軸部ユニット10a(20a、30a、40a、50a)を、中実のモータシャフト11b(21b、31b、41b、51b)を含むモータ11(21、31、41、51)と、モータシャフト11b(21b、31b、41b、51b)に直結される減速機12(22、32、42、52)とを一体的に含むように構成する。これにより、モータシャフトの中空部に配線を挿通する場合に比べて、モータ11(21、31、41、51)と減速機12(22、32、42、52)とを小型化することができるので、モータ11(21、31、41、51)と減速機12(22、32、42、52)とを小型化した分だけ、関節軸部ユニット10a(20a、30a、40a、50a)を小型化することができる。また、モータシャフトの中空部に配線を挿通する場合に比べて、関節軸部ユニット10a(20a、30a、40a、50a)の入力部の回転軸線周りのイナーシャ(慣性モーメント)を低減することができるので、関節軸部ユニット10a(20a、30a、40a、50a)の入力部の回転軸線周りのイナーシャを低減した分だけ、関節軸部ユニット10a(20a、30a、40a、50a)の回転速度および回転加速度を高めることができる。これらの結果、関節軸部ユニット10a(20a、30a、40a、50a)を小型化しつつ、関節軸部ユニット10a(20a、30a、40a、50a)の回転速度および回転加速度を高めることができる。
また、第1実施形態では、上記のように、複数の関節軸部ユニット10a~50aと、配線ユニット70aおよび80aとを設ける。これにより、ユニット単位で垂直多関節ロボット100の組立および整備(ユニットの交換など)を行うことができるので、垂直多関節ロボット100の組立および整備を容易に行うことができる。
また、第1実施形態では、上記のように、第5、6関節軸部ユニット50aを、ツール6aが取り付けられる第6関節軸部60と、第6関節軸部60の先端側とは反対側に接続された第5関節軸部50とを一体的に含むユニットであるように構成する。これにより、第6関節軸部60と第5関節軸部50との2つの関節軸部を一体的に扱うことができるので、第6関節軸部60と第5関節軸部50とを一体的に扱うことができない場合に比べて、第6関節軸部60と第5関節軸部50との組立および整備を容易に行うことができる。その結果、垂直多関節ロボット100の組立および整備をより容易に行うことができる。
また、第1実施形態では、上記のように、第6関節軸部60を、モータシャフト61bを含むモータ61と、モータシャフト61bにベルト機構64を介して連結された減速機62とを含むように構成する。また、第5関節軸部50を、中実のモータシャフト51bを含むモータ51と、モータシャフト51bに直結される減速機52とを含むように構成する。また、第5、6関節軸部ユニット50aを、モータ61と、ベルト機構64と、減速機62と、モータ51と、減速機52とを一体的に含むように構成する。これにより、第6関節軸部60のモータ61、ベルト機構64および減速機62と、第5関節軸部50のモータ51および減速機52とを一体的に扱うことができるので、第6関節軸部60のモータ61、ベルト機構64および減速機62と、第5関節軸部50のモータ51および減速機52との組立および整備を容易に行うことができる。また、ベルトの張力の調整を要するベルト機構64を設ける場合にも、ベルトの張力を調整した状態のベルト機構64を含む第5、6関節軸部ユニット50aに使用中の第5、6関節軸部ユニット50aを交換することができるので、交換時のベルト機構64のベルトの張力の調整を行う必要がない。その結果、交換時にベルト機構64のベルトの張力の調整を行う場合に比べて、ベルト機構64を含む第5、6関節軸部ユニット50aの交換を容易に行うことができる。
また、第1実施形態では、上記のように、配線ユニット70a(80a)を、アーム部2(4)を兼ねるように構成されている。これにより、配線ユニット70a(80a)とアーム部2(4)とを兼用することができるので、配線ユニット70a(80a)をアーム部2(4)とは別個に設ける場合に比べて、配線ユニット70a(80a)のための構造を簡素化することができる。その結果、配線ユニット70a(80a)を設ける場合にも、構造の複雑化および部品点数の増加を抑制することができる。
また、第1実施形態では、上記のように、配線ユニット70a(80a)を、配線配置部73(83)と、配線配置部73(83)を保持するとともに、アーム部2(4)を兼ねる外装部74(84)とを一体的に含むように構成する。これにより、配線配置部73(83)に配線部8を確実に配置しつつ、アーム部2(4)を兼ねる外装部74(84)により構造の複雑化および部品点数の増加を抑制することができる。
また、第1実施形態では、上記のように、アーム部2を、モータ21の駆動力を受ける第1アーム体2aと、第1アーム体2aに対して対向して配置されるとともに、モータ21の駆動力を受けない第2アーム体2bとを含む一対のアーム体2aおよび2bを含むように構成する。また、配線ユニット70aを、一対のアーム体2aおよび2bのうち、第2アーム体2bを兼ねるように構成する。これにより、モータ21の駆動力を直接受けない第2アーム体2bと配線ユニット70aとを兼用することができるので、モータ21の駆動力を受ける第1アーム体2aと配線ユニット70aとを兼用する場合に比べて、配線ユニット70aがアーム部2を兼ねる場合にも、アーム部2を兼ねる配線ユニット70aの構造の複雑化を効果的に抑制することができる。
また、第1実施形態では、上記のように、関節軸部ユニット20a(30a、50a)を、ブレーキを含まないモータであるモータ21(31、51)と、減速機22(32、52)と、減速機22(32、52)に対してモータ21(31、51)側に配置され、モータ21(31、51)を保持するためのブレーキ23(33、53)とを一体的に含むように構成する。これにより、モータ21(31、51)がブレーキ付モータである場合に比べて、モータ21(31、51)を小型化することができる。また、ブレーキ23(33、53)をモータ21(31、51)側に配置することができるので、ブレーキ23(33、53)を極力モータ21(31、51)に近い位置に配置することができる。その結果、ブレーキ23(33、53)によるモータ21(31、51)の保持を安定して行うことができる。
[第2実施形態]
次に、図17~図22を参照して、第2実施形態について説明する。この第2実施形態では、第2関節軸部ユニットおよび第3関節軸部ユニットのブレーキが減速機に対してモータ側に配置されている例について説明した上記第1実施形態とは異なり、第2関節軸部ユニットおよび第3関節軸部ユニットのブレーキが減速機に対してモータ側とは反対側に配置されている例について説明する。なお、上記第1実施形態と同一の構成については、図中において同じ符号を付して図示し、その説明を省略する。
(垂直多関節ロボットの構成)
第2実施形態による垂直多関節ロボット200は、図17に示すように、第2アーム部202、第2関節軸部ユニット220aおよび第3関節軸部ユニット330aを備える点で、上記第1実施形態の垂直多関節ロボット100と相違する。なお、第2関節軸部ユニット320aおよび第3関節軸部ユニット330aは、請求の範囲の「関節軸部ユニット」の一例である。
(第2関節軸部ユニットの構成)
図17~図19に示すように、第2関節軸部ユニット220aは、第2関節軸部220のモータ221と、減速機222と、ブレーキ223と、オイルシール224と、保持部材225および226とを一体的に含むモータユニットである。第2関節軸部ユニット220aは、モータ221と、減速機222と、ブレーキ223と、オイルシール224と保持部材225および226とを一体的に含む状態で、取り付けおよび取り外しが可能なように構成されている。なお、モータ221および減速機222は、それぞれ、請求の範囲の「第1モータ」および「第1減速機」の一例である。
モータ221は、第2アーム部202を回転駆動するための駆動力を発生するように構成されている。モータ221は、筺体221aと、中実のモータシャフト221bとを含んでいる。筺体221aは、固定子、回転子などを収容するように構成されている。一方、筺体221aは、ブレーキおよびオイルシールを収容しないように構成されている。すなわち、モータ221は、ブレーキおよびオイルシールを筺体221a内に含まない、ブレーキ、オイルシールなしモータである。このため、モータ221の筺体221aは、ブレーキ、オイルシールを筺体内に含む、ブレーキ、オイルシール付モータの筺体に比べて、軸方向(X方向)の長さが小さい。モータシャフト221bは、モータ221の出力軸であり、回転軸線A2の延びる方向(X方向)に沿った方向に延びるように構成されている。モータシャフト221bは、減速機222に直結されている。なお、モータシャフト221bは、請求の範囲の「第1モータシャフト」の一例である。
減速機222は、モータ221と同軸に配置されているとともに、モータ221のモータシャフト221bに直結されている。減速機222は、ウェーブジェネレータ222aと、フレクススプライン222bと、サーキュラスプライン222cとを含む波動歯車減速機である。ウェーブジェネレータ222aは、減速機222の入力部であり、モータシャフト221bが連結用の貫通孔322aに挿入されることにより、モータシャフト221bに連結されている。フレクススプライン222bは、減速機222の出力部であり、保持部材226を介して第2アーム部202に連結されている。サーキュラスプライン222cは、減速機222の固定部であり、保持部材225を介して第1アーム部1に取り付けられている。また、減速機222は、軸受部222dを含んでいる。軸受部222dは、サーキュラスプライン222cに対してフレクススプライン222bを回転可能に保持している。軸受部222dは、クロスローラベアリングである。
また、ウェーブジェネレータ222aは、回転中心にモータシャフト221bの挿入用の貫通孔322aを有する楕円型の円盤形状を有している。ウェーブジェネレータ222aは、フレクススプライン222bの後述する円筒部322bに圧入されている。フレクススプライン222bは、円筒部322bと、フランジ部322cとを有している。円筒部322bは、中空形状を有し、回転軸線A2の延びる方向(X方向)に沿った方向に延びるように構成されている。円筒部322bは、サーキュラスプライン222cの内歯と噛み合う外歯を有している。フランジ部322cは、円環形状を有し、円筒部322bのモータ221側(X2方向側)の端部から、外側(回転中心から離れる側)に延びるように構成されている。サーキュラスプライン222cは、円環形状を有するとともに、フレクススプライン222bの外歯と噛み合う内歯を有している。
減速機222の出力部であるフレクススプライン222bは、フランジ部322cにおいて、図示しないねじなどの固定具により、保持部材226に取り付けられている。また、フレクススプライン222bは、保持部材226を介して、図示しない固定具により、第2アーム部202に取り付けられている。また、減速機222の固定部であるサーキュラスプライン222cは、図示しないねじなどの固定具により、保持部材225を介して第1アーム部1に取り付けられている。
ブレーキ223は、モータ221を保持するように構成されている。ブレーキ223は、非通電時にモータ221を保持するとともに、通電時にモータ221の保持を解除する無励磁作動型の電磁ブレーキである。ブレーキ223のブレーキハブ223aは、モータシャフト221bにキーとセットスクリュとにより固定されることにより、モータシャフト221bの先端部に取り付けられている。ブレーキ223の本体部223bは、図示しないねじなどの固定具により、保持部材226のブレーキ保持部226aに取り付けられている。オイルシール224は、減速機222のグリスをシールするように構成されている。オイルシール224は、モータシャフト221bに装着されている。また、オイルシール224は、保持部材226のオイルシール保持部226bに保持されている。
ブレーキ223およびオイルシール224は、モータ221とは別個に、モータ221の筺体221a外に設けられている。ブレーキ223およびオイルシール224は、回転軸線A2の延びる方向(X方向)に沿った方向において、モータ221の筺体221aと、減速機222のウェーブジェネレータ222aとの外側に配置されている。ブレーキ223およびオイルシール224は、減速機222のウェーブジェネレータ222aに対してモータ221側とは反対側(X1方向側)に配置されている。オイルシール224およびブレーキ223は、モータ221側(X2方向側)から減速機222側(X1方向側)に向かって、この順に配置されている。
保持部材225および226は、モータ221、減速機222、ブレーキ223およびオイルシール224を一体的に保持するように構成されている。具体的には、モータ221は、図示しないねじなどの固定具により、保持部材225に取り付けられている。また、減速機222は、ねじなどの固定具207aにより、保持部材225に取り付けられている。また、ブレーキ223は、図示しないねじなどの固定具により、保持部材226のブレーキ保持部226aに取り付けられている。また、オイルシール224は、保持部材226のオイルシール保持部226bに保持されている。第2関節軸部ユニット220aは、モータ221と、減速機222と、ブレーキ223と、オイルシール224と、保持部材225および226とを一体的に含む状態で、図示しないねじなどの固定具により、保持部材225を介して、第1アーム部1に取り付けられるとともに、保持部材226を介して、第2アーム部202に取り付けられるように構成されている。
ここで、減速機222は、回転軸線A2の延びる方向(X方向)に沿った方向に窪む凹部222eを有している。凹部222eは、少なくともウェーブジェネレータ222aと、フレクススプライン222bと、サーキュラスプライン222cと、軸受部222dとにより形成されている。具体的には、凹部222eの底部は、ウェーブジェネレータ222aにより形成されている。また、凹部222eの側部は、フレクススプライン222bと、サーキュラスプライン222cと、軸受部222dとにより形成されている。減速機222は、モータ221側とは反対側(X1方向側)に凹部222eを有している。すなわち、凹部222eは、減速機222側(X1方向側)からモータ221側(X2方向側)に向かって窪むように形成されている。
また、ブレーキ223の少なくとも一部(X2方向側の部分)およびオイルシール224は、凹部222eの内側に配置されている。すなわち、ブレーキ223の少なくとも一部およびオイルシール224は、凹部222eの内側に収まるように配置されている。これにより、凹部222eを利用してブレーキ223の少なくとも一部およびオイルシール224を配置することができるので、第2関節軸部ユニット220aにブレーキ付モータを用いる場合に比べて、第2関節軸部ユニット220aを軸方向(X方向)に小型化することができる。ブレーキ223の少なくとも一部およびオイルシール224は、回転軸線A2の延びる方向に直交する方向(Y方向、Z方向など)に沿った方向に見て、凹部222e(フレクススプライン222bの円筒部322bおよび軸受部222d)にオーバーラップするように配置されている。
同様に、保持部材226のブレーキ保持部226aおよびオイルシール保持部226bが、凹部222eの内側に配置されている。すなわち、ブレーキ保持部226aおよびオイルシール保持部226bが、凹部222eの内側に収まるように配置されている。ブレーキ保持部226aおよびオイルシール保持部226bが、回転軸線A2の延びる方向に直交する方向(Y方向、Z方向など)に沿った方向に見て、凹部222e(フレクススプライン222bの円筒部322bおよび軸受部222d)にオーバーラップするように配置されている。
また、第2実施形態では、第2アーム部202の第1アーム体202aは、ブレーキ223に対向する位置にブレーキ整備用カバー202bを有している。ブレーキ整備用カバー202bは、第2アーム部202の第1アーム体202aに着脱可能に設けられている。ブレーキ整備用カバー202bは、第2アーム部202の第1アーム体202aから取り外された場合、ブレーキ223をブレーキ223の固定具などと共に外部に露出させるように構成されている。これにより、ブレーキ223の交換などのブレーキ223の整備を容易に行うことができる。また、ブレーキ整備用カバー202bは、第2アーム部202の第1アーム体202aに取り付けられた場合、ブレーキ223を覆うように構成されている。ブレーキ223は、第2アーム部202の第1アーム体202aの外表面の近傍に配置されている。
(第3関節軸部ユニットの構成)
図17、図20および図21に示すように、第3関節軸部ユニット230aは、第2関節軸部220のモータ231と、減速機232と、ブレーキ233と、オイルシール234と、保持部材235および236とを一体的に含むモータユニットである。第3関節軸部ユニット230aは、モータ231と、減速機232と、ブレーキ233と、オイルシール234と保持部材235および236とを一体的に含む状態で、取り付けおよび取り外しが可能なように構成されている。なお、モータ231および減速機232は、それぞれ、請求の範囲の「第1モータ」および「第1減速機」の一例である。
モータ231は、第3アーム部3を回転駆動するための駆動力を発生するように構成されている。モータ231は、筺体231aと、中実のモータシャフト231bとを含んでいる。筺体231aは、固定子、回転子などを収容するように構成されている。一方、筺体231aは、ブレーキおよびオイルシールを収容しないように構成されている。すなわち、モータ231は、ブレーキおよびオイルシールを筺体231a内に含まない、ブレーキ、オイルシールなしモータである。このため、モータ231の筺体231aは、ブレーキ、オイルシールを筺体内に含む、ブレーキ、オイルシール付モータの筺体に比べて、軸方向(X方向)の長さが小さい。モータシャフト231bは、モータ231の出力軸であり、回転軸線A3の延びる方向(X方向)に沿った方向に延びるように構成されている。モータシャフト231bは、減速機232に直結されている。なお、モータシャフト231bは、請求の範囲の「第1モータシャフト」の一例である。
減速機232は、モータ231と同軸に配置されているとともに、モータ231のモータシャフト231bに直結されている。減速機232は、ウェーブジェネレータ232aと、フレクススプライン232bと、サーキュラスプライン232cとを含む波動歯車減速機である。ウェーブジェネレータ232aは、減速機232の入力部であり、モータシャフト231bが連結用の貫通孔332aに挿入されることにより、モータシャフト231bに連結されている。フレクススプライン232bは、減速機232の固定部であり、保持部材236を介して第2アーム部202に取り付けられている。サーキュラスプライン232cは、減速機232の出力部であり、保持部材235を介して第3アーム部3に連結されている。また、減速機232は、軸受部232dを含んでいる。軸受部232dは、フレクススプライン232bに対してサーキュラスプライン232cを回転可能に保持している。軸受部232dは、クロスローラベアリングである。
また、ウェーブジェネレータ232aは、回転中心にモータシャフト231bの挿入用の貫通孔332aを有する楕円型の円盤形状を有している。ウェーブジェネレータ232aは、フレクススプライン232bの後述する円筒部332bに圧入されることにより、フレクススプライン232bに取り付けられている。フレクススプライン232bは、円筒部332bと、フランジ部332cとを有している。円筒部332bは、中空形状を有し、回転軸線A3の延びる方向(X方向)に沿った方向に延びるように構成されている。円筒部332bは、サーキュラスプライン232cの内歯と噛み合う外歯を有している。フランジ部332cは、円環形状を有し、円筒部332bのモータ231側(X2方向側)の端部から、外側(回転中心から離れる側)に延びるように構成されている。サーキュラスプライン232cは、円環形状を有するとともに、フレクススプライン232bの外歯と噛み合う内歯を有している。
減速機232の固定部であるフレクススプライン232bは、フランジ部332cにおいて、図示しないねじなどの固定具により、保持部材236を介して第2アーム部202に取り付けられている。また、減速機232の出力部であるサーキュラスプライン232cは、図示しないねじなどの固定具により、保持部材235を介して第3アーム部3に取り付けられている。
ブレーキ233は、モータ231を保持するように構成されている。ブレーキ233は、非通電時にモータ231を保持するとともに、通電時にモータ231の保持を解除する無励磁作動型の電磁ブレーキである。ブレーキ233のブレーキハブ233aは、モータシャフト231bにセットスクリュで固定されることにより、モータシャフト231bの先端部に取り付けられている。ブレーキ233の本体部233bは、図示しないねじなどの固定具により、保持部材236のブレーキ保持部236aに取り付けられている。オイルシール234は、減速機232のグリスをシールするように構成されている。オイルシール234は、モータシャフト231bに装着されている。また、オイルシール234は、保持部材236のオイルシール保持部236bに保持されている。
ブレーキ233およびオイルシール234は、モータ231とは別個に、モータ231の筺体231a外に設けられている。ブレーキ233およびオイルシール234は、回転軸線A3の延びる方向(X方向)に沿った方向において、モータ231の筺体231aと、減速機232のウェーブジェネレータ232aとの外側に配置されている。ブレーキ233およびオイルシール234は、減速機232のウェーブジェネレータ232aに対してモータ231側とは反対側(X1方向側)に配置されている。オイルシール234およびブレーキ233は、モータ231側(X2方向側)から減速機232側(X1方向側)に向かって、この順に配置されている。
保持部材235および236は、モータ231、減速機232、ブレーキ233およびオイルシール234を一体的に保持するように構成されている。具体的には、モータ231は、図示しないねじなどの固定具により、保持部材235に取り付けられている。また、減速機232は、ねじなどの固定具207bにより、保持部材235に取り付けられている。また、ブレーキ233は、図示しないねじなどの固定具により、保持部材236のブレーキ保持部236aに取り付けられている。また、オイルシール234は、保持部材236のオイルシール保持部236bに保持されている。第3関節軸部ユニット230aは、モータ231と、減速機232と、ブレーキ233と、オイルシール234と、保持部材235および236とを一体的に含む状態で、図示しないねじなどの固定具により、保持部材235を介して、第3アーム部3に取り付けられるとともに、保持部材236を介して、第2アーム部202に取り付けられるように構成されている。
ここで、減速機232は、回転軸線A3の延びる方向(X方向)に沿った方向に窪む凹部232eを有している。凹部232eは、少なくともウェーブジェネレータ232aと、フレクススプライン232bと、サーキュラスプライン232cと、軸受部232dとにより形成されている。具体的には、凹部232eの底部は、ウェーブジェネレータ232aにより形成されている。また、凹部232eの側部は、フレクススプライン232bと、サーキュラスプライン232cと、軸受部232dとにより形成されている。減速機232は、モータ231側とは反対側(X1方向側)に凹部232eを有している。すなわち、凹部232eは、減速機232側(X1方向側)からモータ231側(X2方向側)に向かって窪むように形成されている。
また、ブレーキ233の少なくとも一部(X2方向側の部分)およびオイルシール234は、凹部232eの内側に配置されている。すなわち、ブレーキ233の少なくとも一部およびオイルシール234は、凹部232eの内側に収まるように配置されている。これにより、凹部232eを利用してブレーキ233の少なくとも一部およびオイルシール234を配置することができるので、第3関節軸部ユニット230aにブレーキ付モータを用いる場合に比べて、第3関節軸部ユニット230aを軸方向(X方向)に小型化することができる。ブレーキ233の少なくとも一部およびオイルシール234は、回転軸線A3の延びる方向に直交する方向(Y方向、Z方向など)に沿った方向に見て、凹部232e(フレクススプライン232bの円筒部332bおよび軸受部232d)にオーバーラップするように配置されている。
同様に、保持部材236のブレーキ保持部236aおよびオイルシール保持部236bが、凹部232eの内側に配置されている。すなわち、ブレーキ保持部236aおよびオイルシール保持部236bが、凹部232eの内側に収まるように配置されている。ブレーキ保持部236aおよびオイルシール保持部236bが、回転軸線A3の延びる方向に直交する方向(Y方向、Z方向など)に沿った方向に見て、凹部232e(フレクススプライン232bの円筒部332bおよび軸受部232d)にオーバーラップするように配置されている。
また、第2実施形態では、第2アーム部202の第1アーム体202aは、ブレーキ233に対向する位置にブレーキ整備用カバー202cを有している。ブレーキ整備用カバー202cは、第2アーム部202の第1アーム体202aに着脱可能に設けられている。ブレーキ整備用カバー202cは、第2アーム部202の第1アーム体202aから取り外された場合、ブレーキ233をブレーキ233の固定具などと共に外部に露出させるように構成されている。これにより、ブレーキ233の交換などのブレーキ233の整備を容易に行うことができる。また、ブレーキ整備用カバー202cは、第2アーム部202の第1アーム体202aに取り付けられた場合、ブレーキ233を覆うように構成されている。ブレーキ233は、第2アーム部202の第1アーム体202aの外表面の近傍に配置されている。
(第2アーム部の構成)
また、第2実施形態では、図17および図22に示すように、第2アーム部202の第1アーム体202aは、第1アーム体202aを第2アーム体2bに連結する連結部202dを有している。連結部202dは、中空構造を有しており、ブレーキ223のブレーキ線223cおよびブレーキ233のブレーキ線233cを中空部に挿通可能に構成されている。ブレーキ線223cおよびブレーキ線233cは、連結部202dの中空部を介して、第2関節軸部配線ユニット70aに配置されるように構成されている。
第2アーム部202の第1アーム体202aは、連結部202dに対向する位置にブレーキ線整備用カバー202eを有している。ブレーキ線整備用カバー202eは、第2アーム部202の第1アーム体202aに着脱可能に設けられている。ブレーキ線整備用カバー202eは、第2アーム部202の第1アーム体202aから取り外された場合、ブレーキ線223cおよび233cを外部に露出させるように構成されている。これにより、ブレーキ線223cおよび233cの整備を容易に行うことができる。また、ブレーキ線整備用カバー202eは、第2アーム部202の第1アーム体202aに取り付けられた場合、ブレーキ線223cおよび233cを覆うように構成されている。ブレーキ線223cおよび233cは、第2アーム部202の第1アーム体202aの外表面の近傍に配置されている。
なお、第2実施形態のその他の構成は、上記第1実施形態と同様である。
(第2実施形態の効果)
第2実施形態では、以下のような効果を得ることができる。
第2実施形態では、上記のように構成する。これにより、上記第1実施形態と同様に、関節軸部ユニット10a(220a、230a、40a、50a)を小型化しつつ、関節軸部ユニット10a(220a、230a、40a、50a)の回転速度および回転加速度を高めることができる。
また、第2実施形態では、上記のように、関節軸部ユニット220a(230a)を、ブレーキを含まないモータであるモータ221(231)と、減速機222(232)と、減速機222(232)に対してモータ221(231)側とは反対側に配置され、モータ221(231)を保持するためのブレーキ223(233)とを一体的に含む。このように構成すれば、モータ221(231)がブレーキ付モータである場合に比べて、モータ221(231)を小型化することができる。また、ブレーキ223(233)をモータ221(231)側とは反対側に配置することができるので、ブレーキ223(233)を極力アーム部202の表面に近い位置に配置することができる。その結果、ブレーキ223(233)をブレーキの交換などのブレーキに対する整備作業を行いやすい位置に配置することができる。
なお、第2実施形態のその他の効果は、上記第1実施形態と同様である。
[変形例]
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく請求の範囲によって示され、さらに請求の範囲と均等の意味および範囲内でのすべての変更(変形例)が含まれる。
たとえば、上記第1および第2実施形態では、垂直多関節ロボットが、6の自由度を有する6軸ロボットである例を示したが、本発明はこれに限られない。本発明では、5以下の自由度を有するロボットであってもよいし、7以上の自由度を有するロボットであってもよい。
また、上記第1および第2実施形態では、第5関節軸部(先端前関節軸部)と第6関節軸部(先端関節軸部)とが、第5関節軸部と第6関節軸部とを一体的に含むユニットとして形成されている例を示したが、本発明はこれに限られない。本発明では、先端前関節軸部と先端関節軸部とが、個別のユニットとして形成されていてもよい。
また、上記第1および第2実施形態では、第6関節軸部(先端関節軸部)が、モータと、モータのモータシャフトにベルト機構を介して連結された減速機とを含んでいる例を示したが、本発明はこれに限られない。本発明では、先端関節軸部が、モータと、モータのモータシャフトに直結された減速機とを含んでいてもよい。
また、上記第1および第2実施形態では、第2関節軸部配線ユニットおよび第4関節軸部配線ユニットが、アーム部を兼ねるように構成されている例を示したが、本発明はこれに限られない。本発明では、配線ユニットが、アーム部とは別個に設けられていてもよい。
また、上記第1および第2実施形態では、第2アーム部が、第1アーム体と第2アーム体との一対のアーム体を含んでいる例を示したが、本発明はこれに限られない。本発明では、第2アーム部が、単一のアーム体により構成されていてもよい。