JP7046906B2 - 選択的にロックされる関節運動アセンブリを備える外科用器具 - Google Patents
選択的にロックされる関節運動アセンブリを備える外科用器具 Download PDFInfo
- Publication number
- JP7046906B2 JP7046906B2 JP2019502552A JP2019502552A JP7046906B2 JP 7046906 B2 JP7046906 B2 JP 7046906B2 JP 2019502552 A JP2019502552 A JP 2019502552A JP 2019502552 A JP2019502552 A JP 2019502552A JP 7046906 B2 JP7046906 B2 JP 7046906B2
- Authority
- JP
- Japan
- Prior art keywords
- assembly
- joint motion
- shaft
- knob
- lock
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00318—Steering mechanisms
- A61B2017/00323—Cables or rods
- A61B2017/00327—Cables or rods with actuating members moving in opposite directions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2905—Details of shaft flexible
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2912—Handles transmission of forces to actuating rod or piston
- A61B2017/2923—Toothed members, e.g. rack and pinion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2925—Pistol grips
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
- A61B2017/2929—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft with a head rotatable about the longitudinal axis of the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2946—Locking means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320071—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with articulating means for working tip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320094—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw additional movable means performing clamping operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320095—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw with sealing or cauterizing means
Description
図1は、例示的な超音波外科用器具(10)を示す。器具(10)の少なくとも一部は、本明細書で引用する種々の特許、特許出願公開、及び特許出願のうちのいずれかの教示の少なくともいくつかに従って、構築され得、動作可能であり得る。これらに記載され、また以下でより詳細に説明するとおり、器具(10)は、組織を切断して、ほぼ同時に組織(例えば、血管など)を封着又は溶接するように動作可能である。
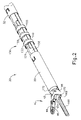
図2~図4で最も良く分かるように、本実施例のエンドエフェクタ(40)は、クランプアーム(44)と、超音波ブレード(160)とを備える。クランプアーム(44)は、ブレード(160)に対向してクランプアーム(44)の下側に固定されるクランプパッド(46)を含む。クランプパッド(46)は、ポリテトラフルオロエチレン(PTFE)及び/又は任意の他の好適な材料を含んでよい。クランプアーム(44)は、遠位外部シース(33)の遠位部分内に固定して取り付けられた上部遠位シャフト要素(172)の遠位突出舌部(43)に枢動可能に固定される。クランプアーム(44)は、クランプアーム(44)とブレード(160)との間に組織を選択的にクランプするために、ブレード(160)に向かって及びブレード(160)から離れる方向に選択的に枢動するように動作可能である。一対のアーム(156)は、クランプアーム(44)から横方向に延在し、遠位外部シース(33)の遠位部分内にスライド可能に配設された、下部遠位シャフト要素(170)に枢動可能に固定される。
本実施例のシャフトアセンブリ(30)は、ハンドルアセンブリ(20)から遠位に延在する。図2~図6Cで示すように、シャフトアセンブリ(30)は、クランプアーム(44)駆動機構部及び上記の音響伝達機構を包囲する遠位外部シース(33)及び近位外部シース(32)を含む。シャフトアセンブリ(30)は、シャフトアセンブリ(30)の遠位部分に位置する関節運動セクション(130)を更に含み、エンドエフェクタ(40)は関節運動セクション(130)より遠位に位置する。図1に示されるように、ノブ(31)は、近位外部シース(32)の近位部分に固定されている。ノブ(31)は本体(22)に対して回転可能であるので、シャフトアセンブリ(30)は、外部シース(32)によって画定される長手方向軸線を中心に、ハンドルアセンブリ(20)に対して回転可能である。かかる回転は、エンドエフェクタ(40)、関節運動セクション(130)、及びシャフトアセンブリ(30)の一体的回転を提供することができる。当然のことながら、回転可能特徴部は、所望により、単に省略されてもよい。
一部の場合では、様々な関節角度で関節運動セクション(130)を選択的にロックすることが望ましい場合がある。換言すると、近位外部シース(32)によって画定された長手方向軸線に対するエンドエフェクタ(40)の更なる偏向を選択的に防ぐことが望ましい場合がある。関節運動セクション(130)をロックすることで、外科手術中に器具(10)を使用する間、不用意にユーザがエンドエフェクタ(40)に関節運動させる(又は関節運動を終了させる(de-articulating))ことを防ぐことができる。一部の場合では、上記のノブ(31)などの回転機構を同時又は個別にロックすることが望ましい場合もある。これにより、外科手術中に器具(10)を使用する間、ユーザが不用意に外部シース(32)によって画定された長手方向軸線を中心にシャフトアセンブリ(30)を回転させてしまうことを防ぐことができる。
図8~図11Bは、器具(10)に容易に組み込むことができる代替的な回転ノブ(220)、代替的なシャフトアセンブリ(230)、及び代替的なトリガ(228)を示す。ノブ(220)は、後述する違いを除いてノブ(120)と実質的に同様である。ノブ(220)は、弓状チャネル(221)、係合部材(226)、ピン(222、224)、及び止めねじ(211、213)を含み、これらは上記の弓状チャネル(121)、係合部材(126)、ピン(122、124)、及び止めねじ(111、113)とそれぞれ実質的に同様である。これもノブ(120)と同様に、ノブ(220)は、ノブ(220)がハウジング(110)の円筒形部分(112)内で回転するように動作可能となるように、ハウジング(110)の第1の中空円筒形部分(112)内に回転可能に配設される。ピン(222、224)はハウジング(110)の第2の円筒形部分(114)内に延在し、並進可能部材(261、262)の上面に形成された対応する一対のチャネル(263、265)内に回転可能かつ摺動可能に配設される。チャネル(263、265)は、ノブ(220)の回転軸の両側に配置され、その結果、この軸を中心にしたノブ(220)の回転が、並進可能部材(261、262)のそれぞれ反対の長手方向の並進を生じさせる。
図12~図15Dは、上記の器具(10)に容易に組み込むことが可能な関節運動制御アセンブリ(300)と、円錐状ロック(310)と、ノブ(331)と、ハンドルアセンブリ(320)と、シャフトアセンブリ(330)とを示す。ハンドルアセンブリ(320)は、後述する違いを除いて、上述したハンドルアセンブリ(20)と実質的に同様である。具体的には、ハンドルアセンブリ(320)は、上記の本体(22)及びボタン(26)と実質的に同様の本体(322)及びボタン(326)を含む。しかしながら、ハンドルアセンブリ(320)は関節運動指ホイール(325)を更に含む。以下でより詳細に説明するとおり、関節運動指ホイール(325)は、関節運動制御アセンブリ(300)を選択的に制御して、シャフトアセンブリ(330)の近位外部シース(332)によって画定された長手方向軸線(L2)に対してエンドエフェクタ(40)を関節運動させることができる。単なる例として、指ホイール(325)は、その開示が参照により本明細書に組み込まれる2015年4月16日に出願された「Ultrasonic Surgical Instrument with Opposing Thread Drive for End Effector Articulation」と題された米国特許出願第14/688,663号の教示のうちの少なくともいくつかに従って、エンドエフェクタ(40)の関節運動を駆動するように動作可能であり得る。
以下の実施例は、本明細書の教示を組み合わせるか又は適用することができる、種々の非網羅的な方法に関する。以下の実施例は、本出願における又は本出願の後の出願におけるどの時点でも提示され得る、いずれの請求項の適用範囲をも限定することを目的としたものではない、と理解すべきである。一切の棄権をも意図するものではない。以下の実施例は、単なる例示の目的で与えられるものにすぎない。本明細書の様々な教示は、その他の多くの方法で構成及び適用が可能であると考えられている。また、いくつかの変形形態では、以下の実施例において言及される特定の特徴を省略してよいことも考えられる。したがって、本発明者又は本発明者の利益の継承者により、後日、そうである旨が明示的に示されない限り、以下に言及される態様又は特徴のいずれも重要なものとして見なされるべきではない。以下に言及される特徴以外の更なる特徴を含む請求項が本出願において、又は本出願に関連する後の出願において示される場合、これらの更なる特徴は、特許性に関連するいずれかの理由により追加されたものとしても、仮定されるべきではない。
組織上で動作するための装置であって、(a)本体アセンブリと、(b)本体アセンブリから遠位に延在するシャフトアセンブリであって、長手方向軸線を画定する、シャフトアセンブリと、(c)音響導波管であって、可撓性部分を備える、音響導波管と、(d)シャフトアセンブリと連結した関節運動セクションであって、関節運動セクションの一部は導波管の可撓性部分を包囲し、関節運動セクションは、(i)第1の部材、及び(ii)第1の部材に対して長手方向に並進可能な第2の部材を更に含む、関節運動セクションと、(e)第2の部材を第1の部材に対して長手方向に並進させるために、シャフトアセンブリに対して移動するように構成された関節運動制御アセンブリと、(f)導波管と音響通信する超音波ブレードを備えるエンドエフェクタと、(g)関節運動制御アセンブリのシャフトアセンブリに対する移動を防ぐように構成された関節運動ロックと、を備える、装置。
シャフトアセンブリは第1の位置から第2の位置まで並進するように構成された外部シースを備え、関節運動ロックは、(i)関節運動制御アセンブリ上に位置する複数の歯と、(ii)シャフトアセンブリの外部シースに固定されたピンであって、外部シースが第2の位置にある時に複数の歯と噛み合うように構成された、ピンと、を備える、実施例1に記載の装置。
本体アセンブリはトリガを更に備え、トリガは第1の枢動位置から第2の枢動位置まで本体アセンブリに向かって又は本体アセンブリから離れるように枢動するように構成されている、実施例2に記載の装置。
トリガは、トリガが第1の枢動位置から第2の枢動位置まで枢動するのに反応して、外部シースを第1の位置から第2の位置まで並進させるように構成されている、実施例3に記載の装置。
装置は本体アセンブリに回転可能に連結されたノブを更に備え、ノブは長手方向軸線を中心にシャフトアセンブリを回転させるように構成されている、実施例4に記載の装置。
外部シースは、本体アセンブリ内に延在するスプライン近位部分を更に備える、実施例4~5のうち任意の1つ又は複数に記載の装置。
トリガはピンを有するレバーを更に備え、ピンは、トリガが第2の枢動位置にある時にスプライン近位部分と噛み合うように構成されている、実施例6に記載の装置。
関節運動制御アセンブリは、左巻きのねじ山及び右巻きのねじ山を備える回転駆動歯車を更に備える、実施例1~7のうち任意の1つ又は複数に記載の装置。
第1の部材は、回転駆動歯車の左巻きのねじ山に連結された第1の並進駆動歯車を更に備え、第2の部材は、回転駆動歯車の右巻きのねじ山に連結された第2の並進駆動歯車を更に備える、実施例8に記載の装置。
関節運動ロックは関節運動制御アセンブリと接触する第1の付勢要素を更に備え、第1の付勢要素は関節運動制御アセンブリを第1の位置に付勢して、関節運動制御アセンブリのシャフトアセンブリに対する移動を防ぐように構成されている、実施例9に記載の装置。
第1の付勢要素は、回転駆動歯車の左巻きのねじ山と第1の部材の第1の並進駆動歯車との間に摩擦制動力を付与して、関節運動制御アセンブリのシャフトアセンブリに対する移動を防ぐように構成されている、実施例10に記載の装置。
関節運動ロックは円錐状ロック部材を更に備え、円錐状ロック部材は第3の位置から第4の位置まで作動するように構成され、その結果、関節運動制御アセンブリが第1の位置から第2の位置まで作動し、関節運動制御アセンブリは第2の位置でシャフトアセンブリに対して移動するように構成されている、実施例10~11のうち任意の1つ又は複数に記載の装置。
円錐状ロック部材は第2の付勢要素と接触し、第2の付勢要素は円錐状ロック部材を第3の位置に付勢するように構成されている、実施例12に記載の装置。
装置は、本体アセンブリに回転可能に連結されたノブを更に備え、ノブは長手方向軸線を中心にシャフトアセンブリを回転させるように構成されており、ノブは円錐状ロック部材を収納する、実施例13に記載の装置。
円錐状ロック部材は、第3の位置でノブが長手方向軸線を中心にシャフトアセンブリを回転させることを防ぐように構成されている、実施例14に記載の装置。
ノブはロック解除ピンを備え、ロック解除ピンは、円錐状ロック部材を第3の位置から第4の位置まで作動させるように構成されている、実施例15に記載の装置。
円錐状ロック部材は、第3の位置で関節運動制御アセンブリをロックするように更に構成されている、実施例15~16のうち任意の1つ又は複数に記載の装置。
組織上で動作するための装置であって、(a)本体アセンブリと、(b)本体アセンブリから遠位に延在するシャフトであって、長手方向軸線を画定する、シャフトと、(c)シャフトと連結した関節運動セクションと、(d)関節運動セクションと連結したエンドエフェクタであって、組織に係合するように構成された作業要素を備える、エンドエフェクタと、(e)関節運動セクションの関節運動を駆動し、それによりエンドエフェクタを長手方向軸線から偏向させるように動作可能な関節運動駆動アセンブリであって、(i)第1の並進駆動装置と、(ii)第2の並進駆動装置と、を含む、関節運動駆動アセンブリと、(f)関節運動駆動アセンブリに係合して、第1の並進駆動装置を第2の並進駆動装置に対して固定するように構成された、関節運動ロックアセンブリと、を備える、装置。
関節運動ロックは付勢されて、第1の並進駆動装置を第2の並進駆動装置に対して固定する、実施例18に記載の装置。
組織上で動作するための装置であって、(a)本体アセンブリと、(b)本体アセンブリから遠位に延在するシャフトであって、長手方向軸線を画定する、シャフトと、(c)シャフトと連結した関節運動セクションと、(d)関節運動セクションと連結したエンドエフェクタと、(e)本体アセンブリと回転可能に連結したノブであって、長手方向軸線を中心に、シャフトと、関節運動セクションと、エンドエフェクタと、を回転させるように構成された、ノブと、(e)第1の対の並進部材であって、関節運動セクションを作動させ、それによりエンドエフェクタを長手方向軸から偏向させるように動作可能である、第1の対の並進部材と、(f)第1の対の並進部材と連通する駆動アセンブリであって、第1の対の並進部材を並進させて関節運動セクションを作動させるように構成された、駆動アセンブリと、(g)ロックアセンブリであって、ノブの長手方向軸線を中心にした回転と、第1の対の並進部材の並進と、を同時に防ぐように構成された、ロックアセンブリと、を備える、装置。
本明細書に記載される器具のいずれの変形形態も、上述されるものに加えて、又はそれらの代わりに、種々のその他の特徴を含んでもよい、と理解すべきである。実施例のみの目的で、本明細書に記載される器具のいずれもが、本明細書に参考として組み込まれる種々の参考文献のいずれかにおいて開示される種々の特徴のうちの、1つ以上を含むことができる。また、多数の方法にて、本明細書の引用文献のいずれかの教示と本明細書の教示とを容易に組み合わせ得るように、本明細書の教示は、本明細書のその他の引用文献のいずれかに記載される器具のいずれにも容易に適用され得る、とも理解すべきである。更に、当業者は、本明細書の種々の教示が電気外科器具、ステープル留め器具、及び他の種類の外科器具に容易に適用され得ることを認識するであろう。本明細書の教示が組み込まれ得るその他の種類の器具が、当業者に明らかであろう。
(1) 組織上で動作するための装置であって、
(a)本体アセンブリと、
(b)前記本体アセンブリから遠位に延在するシャフトアセンブリであって、長手方向軸線を画定する、シャフトアセンブリと、
(c)音響導波管であって、可撓性部分を備える、音響導波管と、
(d)前記シャフトアセンブリと連結した関節運動セクションであって、前記関節運動セクションの一部は前記導波管の前記可撓性部分を包囲し、前記関節運動セクションは、
(i)第1の部材、及び
(ii)前記第1の部材に対して長手方向に並進可能な第2の部材を更に含む、関節運動セクションと、
(e)前記第2の部材を前記第1の部材に対して長手方向に並進させるために、前記シャフトアセンブリに対して移動するように構成された関節運動制御アセンブリと、
(f)前記導波管と音響通信する超音波ブレードを備えるエンドエフェクタと、
(g)前記関節運動制御アセンブリの前記シャフトアセンブリに対する移動を防ぐように構成された関節運動ロックと、を備える、装置。
(2) 前記シャフトアセンブリは第1の位置から第2の位置まで並進するように構成された外部シースを備え、前記関節運動ロックは、
(i)前記関節運動制御アセンブリ上に位置する複数の歯と、
(ii)前記シャフトアセンブリの外部シースに固定されたピンであって、前記外部シースが前記第2の位置にある時に前記複数の歯と噛み合うように構成された、ピンと、を備える、実施態様1に記載の装置。
(3) 前記本体アセンブリはトリガを更に備え、前記トリガは第1の枢動位置から第2の枢動位置まで前記本体アセンブリに向かって又は前記本体アセンブリから離れるように枢動するように構成されている、実施態様2に記載の装置。
(4) 前記トリガは、前記トリガが前記第1の枢動位置から前記第2の枢動位置まで枢動するのに反応して、前記外部シースを前記第1の位置から前記第2の位置まで並進させるように構成されている、実施態様3に記載の装置。
(5) 前記装置は前記本体アセンブリに回転可能に連結されたノブを更に備え、前記ノブは前記長手方向軸線を中心に前記シャフトアセンブリを回転させるように構成されている、実施態様4に記載の装置。
(7) 前記トリガはピンを有するレバーを更に備え、前記ピンは、前記トリガが前記第2の枢動位置にある時に前記スプライン近位部分と噛み合うように構成されている、実施態様6に記載の装置。
(8) 前記関節運動制御アセンブリは、左巻きのねじ山及び右巻きのねじ山を備える回転駆動歯車を更に備える、実施態様1に記載の装置。
(9) 前記第1の部材は、前記回転駆動歯車の前記左巻きのねじ山に連結された第1の並進駆動歯車を更に備え、前記第2の部材は、前記回転駆動歯車の前記右巻きのねじ山に連結された第2の並進駆動歯車を更に備える、実施態様8に記載の装置。
(10) 前記関節運動ロックは前記関節運動制御アセンブリと接触する第1の付勢要素を更に備え、前記第1の付勢要素は関節運動制御アセンブリを第1の位置に付勢して、前記関節運動制御アセンブリの前記シャフトアセンブリに対する移動を防ぐように構成されている、実施態様9に記載の装置。
(12) 前記関節運動ロックは円錐状ロック部材を更に備え、前記円錐状ロック部材は第3の位置から第4の位置まで作動するように構成され、その結果、前記関節運動制御アセンブリが前記第1の位置から第2の位置まで作動し、前記関節運動制御アセンブリは前記第2の位置で前記シャフトアセンブリに対して移動するように構成されている、実施態様10に記載の装置。
(13) 前記円錐状ロック部材は第2の付勢要素と接触し、前記第2の付勢要素は前記円錐状ロック部材を前記第3の位置に付勢するように構成されている、実施態様12に記載の装置。
(14) 前記装置は、前記本体アセンブリに回転可能に連結されたノブを更に備え、前記ノブは前記長手方向軸線を中心に前記シャフトアセンブリを回転させるように構成されており、前記ノブは前記円錐状ロック部材を収納する、実施態様13に記載の装置。
(15) 前記円錐状ロック部材は、前記第3の位置で前記ノブが前記長手方向軸線を中心に前記シャフトアセンブリを回転させることを防ぐように構成されている、実施態様14に記載の装置。
(17) 前記円錐状ロック部材は、前記第3の位置で前記関節運動制御アセンブリをロックするように更に構成されている、実施態様15に記載の装置。
(18) 組織上で動作するための装置であって、
(a)本体アセンブリと、
(b)前記本体アセンブリから遠位に延在するシャフトであって、長手方向軸線を画定する、シャフトと、
(c)前記シャフトと連結した関節運動セクションと、
(d)前記関節運動セクションと連結したエンドエフェクタであって、組織に係合するように構成された作業要素を備える、エンドエフェクタと、
(e)前記関節運動セクションの関節運動を駆動し、それにより前記エンドエフェクタを前記長手方向軸線から偏向させるように動作可能な関節運動駆動アセンブリであって、
(i)第1の並進駆動装置と、
(ii)第2の並進駆動装置と、を含む、関節運動駆動アセンブリと、
(f)前記関節運動駆動アセンブリに係合して、前記第1の並進駆動装置を前記第2の並進駆動装置に対して固定するように構成された、関節運動ロックアセンブリと、を備える、装置。
(19) 前記関節運動ロックは付勢されて、前記第1の並進駆動装置を前記第2の並進駆動装置に対して固定する、実施態様18に記載の装置。
(20) 組織上で動作するための装置であって、
(a)本体アセンブリと、
(b)前記本体アセンブリから遠位に延在するシャフトであって、長手方向軸線を画定する、シャフトと、
(c)前記シャフトと連結した関節運動セクションと、
(d)前記関節運動セクションと連結したエンドエフェクタと、
(e)前記本体アセンブリと回転可能に連結したノブであって、前記長手方向軸線を中心に、前記シャフトと、前記関節運動セクションと、前記エンドエフェクタと、を回転させるように構成された、ノブと、
(e)第1の対の並進部材であって、前記関節運動セクションを作動させ、それにより前記エンドエフェクタを前記長手方向軸線から偏向させるように動作可能である、第1の対の並進部材と、
(f)前記第1の対の並進部材と連通する駆動アセンブリであって、前記第1の対の並進部材を並進させて前記関節運動セクションを作動させるように構成された、駆動アセンブリと、
(g)ロックアセンブリであって、ノブの前記長手方向軸線を中心にした回転と、前記第1の対の並進部材の並進と、を同時に防ぐように構成された、ロックアセンブリと、を備える、装置。
Claims (16)
- 組織上で動作するための装置であって、
(a)本体アセンブリと、
(b)前記本体アセンブリから遠位に延在するシャフトアセンブリであって、長手方向軸線を画定する、シャフトアセンブリと、
(c)音響導波管であって、可撓性部分を備える、音響導波管と、
(d)前記シャフトアセンブリと連結した関節運動セクションであって、前記関節運動セクションの一部は前記音響導波管の前記可撓性部分を包囲し、前記関節運動セクションは、
(i)第1の部材、及び
(ii)前記第1の部材に対して長手方向に並進可能な第2の部材を更に含む、関節運動セクションと、
(e)前記第2の部材を前記第1の部材に対して長手方向に並進させるために、前記シャフトアセンブリに対して移動するように構成された関節運動制御アセンブリと、
(f)前記音響導波管と音響通信する超音波ブレードを備えるエンドエフェクタと、
(g)前記関節運動制御アセンブリの前記シャフトアセンブリに対する移動を防ぐように構成された関節運動ロックと、を備え、
前記シャフトアセンブリは第1の位置から第2の位置まで並進するように構成された外部シースを備え、前記関節運動ロックは、
(i)前記関節運動制御アセンブリ上に位置する複数の歯と、
(ii)前記シャフトアセンブリの前記外部シースに固定されたピンであって、前記外部シースが前記第2の位置にある時に前記複数の歯と噛み合うように構成された、ピンと、を備える、装置。 - 前記本体アセンブリはトリガを更に備え、前記トリガは第1の枢動位置から第2の枢動位置まで前記本体アセンブリに向かって又は前記本体アセンブリから離れるように枢動するように構成されている、請求項1に記載の装置。
- 前記トリガは、前記トリガが前記第1の枢動位置から前記第2の枢動位置まで枢動するのに反応して、前記外部シースを前記第1の位置から前記第2の位置まで並進させるように構成されている、請求項2に記載の装置。
- 前記装置は前記本体アセンブリに回転可能に連結されたノブを更に備え、前記ノブは前記長手方向軸線を中心に前記シャフトアセンブリを回転させるように構成されている、請求項3に記載の装置。
- 前記外部シースは、前記本体アセンブリ内に延在するスプライン近位部分を更に備える、請求項3に記載の装置。
- 前記トリガはピンを有するレバーを更に備え、前記レバーの前記ピンは、前記トリガが前記第2の枢動位置にある時に前記スプライン近位部分と噛み合うように構成されている、請求項5に記載の装置。
- 組織上で動作するための装置であって、
(a)本体アセンブリと、
(b)前記本体アセンブリから遠位に延在するシャフトアセンブリであって、長手方向軸線を画定する、シャフトアセンブリと、
(c)音響導波管であって、可撓性部分を備える、音響導波管と、
(d)前記シャフトアセンブリと連結した関節運動セクションであって、前記関節運動セクションの一部は前記音響導波管の前記可撓性部分を包囲し、前記関節運動セクションは、
(i)第1の部材、及び
(ii)前記第1の部材に対して長手方向に並進可能な第2の部材を更に含む、関節運動セクションと、
(e)前記第2の部材を前記第1の部材に対して長手方向に並進させるために、前記シャフトアセンブリに対して移動するように構成された関節運動制御アセンブリと、
(f)前記音響導波管と音響通信する超音波ブレードを備えるエンドエフェクタと、
(g)前記関節運動制御アセンブリの前記シャフトアセンブリに対する移動を防ぐように構成された関節運動ロックと、を備え、
前記関節運動制御アセンブリは、左巻きのねじ山及び右巻きのねじ山を備える回転駆動歯車を更に備え、
前記第1の部材は、前記回転駆動歯車の前記左巻きのねじ山に連結された第1の並進駆動歯車を更に備え、前記第2の部材は、前記回転駆動歯車の前記右巻きのねじ山に連結された第2の並進駆動歯車を更に備え、
前記関節運動ロックは前記関節運動制御アセンブリと接触する第1の付勢要素を更に備え、前記第1の付勢要素は関節運動制御アセンブリを第1の位置に付勢して、前記関節運動制御アセンブリの前記シャフトアセンブリに対する移動を防ぐように構成されている、装置。 - 前記第1の付勢要素は、前記回転駆動歯車の前記左巻きのねじ山と前記第1の部材の前記第1の並進駆動歯車との間に摩擦制動力を付与して、前記関節運動制御アセンブリの前記シャフトアセンブリに対する移動を防ぐように構成されている、請求項7に記載の装置。
- 前記関節運動ロックは円錐状ロック部材を更に備え、前記円錐状ロック部材は第3の位置から第4の位置まで作動するように構成され、その結果、前記関節運動制御アセンブリが前記第1の位置から第2の位置まで作動し、前記関節運動制御アセンブリは前記第2の位置で前記シャフトアセンブリに対して移動するように構成されている、請求項7に記載の装置。
- 前記円錐状ロック部材は第2の付勢要素と接触し、前記第2の付勢要素は前記円錐状ロック部材を前記第3の位置に付勢するように構成されている、請求項9に記載の装置。
- 前記装置は、前記本体アセンブリに回転可能に連結されたノブを更に備え、前記ノブは前記長手方向軸線を中心に前記シャフトアセンブリを回転させるように構成されており、前記ノブは前記円錐状ロック部材を収納する、請求項10に記載の装置。
- 前記円錐状ロック部材は、前記第3の位置で前記ノブが前記長手方向軸線を中心に前記シャフトアセンブリを回転させることを防ぐように構成されている、請求項11に記載の装置。
- 前記ノブはロック解除ピンを備え、前記ロック解除ピンは、前記円錐状ロック部材を前記第3の位置から前記第4の位置まで作動させるように構成されている、請求項12に記載の装置。
- 前記円錐状ロック部材は、前記第3の位置で前記関節運動制御アセンブリをロックするように更に構成されている、請求項12に記載の装置。
- 組織上で動作するための装置であって、
(a)本体アセンブリと、
(b)前記本体アセンブリから遠位に延在するシャフトであって、長手方向軸線を画定する、シャフトと、
(c)前記シャフトと連結した関節運動セクションと、
(d)前記関節運動セクションと連結したエンドエフェクタであって、組織に係合するように構成された作業要素を備える、エンドエフェクタと、
(e)前記関節運動セクションの関節運動を駆動し、それにより前記エンドエフェクタを前記長手方向軸線から偏向させるように動作可能な関節運動駆動アセンブリであって、
(i)第1の並進駆動装置と、
(ii)第2の並進駆動装置と、を含む、関節運動駆動アセンブリと、
(f)前記関節運動駆動アセンブリに係合して、前記第1の並進駆動装置を前記第2の並進駆動装置に対して固定するように構成された、関節運動ロックアセンブリと、を備え、
前記シャフトは第1の位置から第2の位置まで並進するように構成された外部シースを備え、前記関節運動ロックアセンブリは、
(i)前記関節運動駆動アセンブリ上に位置する複数の歯と、
(ii)前記シャフトの前記外部シースに固定されたピンであって、前記外部シースが前記第2の位置にある時に前記複数の歯と噛み合うように構成された、ピンと、を備える、装置。 - 組織上で動作するための装置であって、
(a)本体アセンブリと、
(b)前記本体アセンブリから遠位に延在するシャフトであって、長手方向軸線を画定する、シャフトと、
(c)前記シャフトと連結した関節運動セクションと、
(d)前記関節運動セクションと連結したエンドエフェクタと、
(e)前記本体アセンブリと回転可能に連結したノブであって、前記長手方向軸線を中心に、前記シャフトと、前記関節運動セクションと、前記エンドエフェクタと、を回転させるように構成された、ノブと、
(e)第1の対の並進部材であって、前記関節運動セクションを作動させ、それにより前記エンドエフェクタを前記長手方向軸線から偏向させるように動作可能である、第1の対の並進部材と、
(f)前記第1の対の並進部材と連通する駆動アセンブリであって、前記第1の対の並進部材を並進させて前記関節運動セクションを作動させるように構成された、駆動アセンブリと、
(g)ロックアセンブリであって、前記長手方向軸線を中心にした前記回転と、前記第1の対の並進部材の並進と、を同時に防ぐように構成された、ロックアセンブリと、を備え、
前記シャフトは第1の位置から第2の位置まで並進するように構成された外部シースを備え、前記ロックアセンブリは、
(i)前記ノブ上に位置する複数の歯と、
(ii)前記シャフトの前記外部シースに固定されたピンであって、前記外部シースが前記第2の位置にある時に前記複数の歯と噛み合うように構成された、ピンと、を備える、装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/089,748 | 2016-04-04 | ||
| US15/089,748 US10575836B2 (en) | 2016-04-04 | 2016-04-04 | Surgical instrument with selectively locked articulation assembly |
| PCT/US2017/025952 WO2017176761A1 (en) | 2016-04-04 | 2017-04-04 | Surgical instrument with selectively locked articulation assembly |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019513512A JP2019513512A (ja) | 2019-05-30 |
| JP7046906B2 true JP7046906B2 (ja) | 2022-04-04 |
Family
ID=58579284
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019502552A Active JP7046906B2 (ja) | 2016-04-04 | 2017-04-04 | 選択的にロックされる関節運動アセンブリを備える外科用器具 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10575836B2 (ja) |
| EP (2) | EP3439564B1 (ja) |
| JP (1) | JP7046906B2 (ja) |
| CN (1) | CN109069177B (ja) |
| BR (1) | BR112018070136B1 (ja) |
| PL (1) | PL3439564T3 (ja) |
| WO (1) | WO2017176761A1 (ja) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11376003B2 (en) * | 2018-07-05 | 2022-07-05 | Lexington Medical, Inc. | Surgical handle articulation assembly |
| US11712261B2 (en) | 2019-08-30 | 2023-08-01 | Cilag Gmbh International | Rotatable linear actuation mechanism |
| US11612409B2 (en) | 2019-08-30 | 2023-03-28 | Cilag Gmbh International | Ultrasonic transducer alignment of an articulating ultrasonic surgical instrument |
| US11690642B2 (en) | 2019-08-30 | 2023-07-04 | Cilag Gmbh International | Ultrasonic surgical instrument with a multi-planar articulating shaft assembly |
| US11471181B2 (en) | 2019-08-30 | 2022-10-18 | Cilag Gmbh International | Ultrasonic surgical instrument with axisymmetric clamping |
| US11457945B2 (en) | 2019-08-30 | 2022-10-04 | Cilag Gmbh International | Ultrasonic blade and clamp arm alignment features |
| EP4021318A1 (en) | 2019-08-30 | 2022-07-06 | Cilag GmbH International | Ultrasonic surgical instrument with a multi-planar articulating shaft assembly |
| JP1660090S (ja) * | 2019-10-04 | 2020-05-25 | ||
| JP1660089S (ja) * | 2019-10-04 | 2020-05-25 | ||
| JP1660086S (ja) * | 2019-10-04 | 2020-05-25 | ||
| JP1660087S (ja) * | 2019-10-04 | 2020-05-25 | ||
| US11298131B2 (en) | 2020-01-15 | 2022-04-12 | Lexington Medical, Inc. | Multidirectional apparatus |
| US11116501B1 (en) | 2020-04-10 | 2021-09-14 | Lexington Medical, Inc. | Surgical handle articulation assemblies |
| US11766275B2 (en) | 2020-05-18 | 2023-09-26 | Covidien Lp | Articulating ultrasonic surgical instruments and systems |
| US11864757B2 (en) | 2021-01-15 | 2024-01-09 | Lexington, Medical, Inc. | Reloadable cartridge assembly |
| JP1702878S (ja) * | 2021-04-09 | 2021-12-20 | ||
| US11622764B2 (en) | 2021-04-27 | 2023-04-11 | Lexington Medical, Inc. | Surgical handle assembly |
| CN113208678A (zh) * | 2021-05-27 | 2021-08-06 | 天津瑞奇外科器械股份有限公司 | 一种外科器械及其操作方法 |
| CN113243955B (zh) * | 2021-06-18 | 2022-05-03 | 苏州优脉瑞医疗科技有限公司 | 一种钉仓角度精确定位的吻合器 |
| WO2023060583A1 (en) * | 2021-10-15 | 2023-04-20 | Covidien Lp | Articulation mechanism for surgical devices |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012516754A (ja) | 2009-02-05 | 2012-07-26 | エシコン・エンド−サージェリィ・インコーポレイテッド | 外科用ステープリング器具 |
| US20150320437A1 (en) | 2014-04-22 | 2015-11-12 | Ethicon Endo-Surgery, Inc. | Method of operating an articulating ultrasonic surgical instrument |
| US20150351854A1 (en) | 2003-05-23 | 2015-12-10 | Intuitive Surgical Operations, Inc. | Tool With Articulation Lock |
Family Cites Families (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5374277A (en) | 1992-10-09 | 1994-12-20 | Ethicon, Inc. | Surgical instrument |
| US5322055B1 (en) | 1993-01-27 | 1997-10-14 | Ultracision Inc | Clamp coagulator/cutting system for ultrasonic surgical instruments |
| US5704534A (en) * | 1994-12-19 | 1998-01-06 | Ethicon Endo-Surgery, Inc. | Articulation assembly for surgical instruments |
| US6063098A (en) | 1996-12-23 | 2000-05-16 | Houser; Kevin | Articulable ultrasonic surgical apparatus |
| US5980510A (en) | 1997-10-10 | 1999-11-09 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having improved clamp arm pivot mount |
| US5873873A (en) | 1997-10-10 | 1999-02-23 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having improved clamp mechanism |
| US6589200B1 (en) | 1999-02-22 | 2003-07-08 | Ethicon Endo-Surgery, Inc. | Articulating ultrasonic surgical shears |
| US5897523A (en) | 1998-04-13 | 1999-04-27 | Ethicon Endo-Surgery, Inc. | Articulating ultrasonic surgical instrument |
| US6454782B1 (en) | 1998-04-13 | 2002-09-24 | Ethicon Endo-Surgery, Inc. | Actuation mechanism for surgical instruments |
| US5989264A (en) | 1998-06-11 | 1999-11-23 | Ethicon Endo-Surgery, Inc. | Ultrasonic polyp snare |
| US6325811B1 (en) | 1999-10-05 | 2001-12-04 | Ethicon Endo-Surgery, Inc. | Blades with functional balance asymmetries for use with ultrasonic surgical instruments |
| US6752815B2 (en) | 2001-01-31 | 2004-06-22 | Ethicon Endo-Surgery, Inc. | Method and waveguides for changing the direction of longitudinal vibrations |
| US6783524B2 (en) | 2001-04-19 | 2004-08-31 | Intuitive Surgical, Inc. | Robotic surgical tool with ultrasound cauterizing and cutting instrument |
| EP1802245B8 (en) | 2004-10-08 | 2016-09-28 | Ethicon Endo-Surgery, LLC | Ultrasonic surgical instrument |
| US20070191713A1 (en) | 2005-10-14 | 2007-08-16 | Eichmann Stephen E | Ultrasonic device for cutting and coagulating |
| US7621930B2 (en) | 2006-01-20 | 2009-11-24 | Ethicon Endo-Surgery, Inc. | Ultrasound medical instrument having a medical ultrasonic blade |
| US8574252B2 (en) | 2006-06-01 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Ultrasonic blade support |
| US9561045B2 (en) | 2006-06-13 | 2017-02-07 | Intuitive Surgical Operations, Inc. | Tool with rotation lock |
| BRPI0806674A2 (pt) | 2007-01-16 | 2014-05-13 | Ethicon Endo Surgery Inc | Dispositivo ultrassônico para corte e coagulação |
| US8057498B2 (en) | 2007-11-30 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument blades |
| CN101883531B (zh) | 2007-10-05 | 2014-07-02 | 伊西康内外科公司 | 人体工程学外科手术器械 |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| EP2361042B1 (en) | 2008-09-12 | 2016-11-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic device for fingertip control |
| US8461744B2 (en) | 2009-07-15 | 2013-06-11 | Ethicon Endo-Surgery, Inc. | Rotating transducer mount for ultrasonic surgical instruments |
| US8663220B2 (en) | 2009-07-15 | 2014-03-04 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8986302B2 (en) | 2009-10-09 | 2015-03-24 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| WO2011084610A1 (en) * | 2009-12-16 | 2011-07-14 | Children Medical Center Corporation | Liposomes for preventing the spread of hiv |
| US20120078244A1 (en) * | 2010-09-24 | 2012-03-29 | Worrell Barry C | Control features for articulating surgical device |
| US9402682B2 (en) | 2010-09-24 | 2016-08-02 | Ethicon Endo-Surgery, Llc | Articulation joint features for articulating surgical device |
| US9381058B2 (en) | 2010-11-05 | 2016-07-05 | Ethicon Endo-Surgery, Llc | Recharge system for medical devices |
| US20120116265A1 (en) | 2010-11-05 | 2012-05-10 | Houser Kevin L | Surgical instrument with charging devices |
| US10238416B2 (en) | 2012-04-30 | 2019-03-26 | Ethicon Llc | Ultrasonic device for cutting and coagulating |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9095367B2 (en) | 2012-10-22 | 2015-08-04 | Ethicon Endo-Surgery, Inc. | Flexible harmonic waveguides/blades for surgical instruments |
| US10172636B2 (en) | 2013-09-17 | 2019-01-08 | Ethicon Llc | Articulation features for ultrasonic surgical instrument |
| US9949785B2 (en) | 2013-11-21 | 2018-04-24 | Ethicon Llc | Ultrasonic surgical instrument with electrosurgical feature |
-
2016
- 2016-04-04 US US15/089,748 patent/US10575836B2/en active Active
-
2017
- 2017-04-04 CN CN201780024519.5A patent/CN109069177B/zh active Active
- 2017-04-04 EP EP17718664.0A patent/EP3439564B1/en active Active
- 2017-04-04 BR BR112018070136-0A patent/BR112018070136B1/pt active IP Right Grant
- 2017-04-04 EP EP20187028.4A patent/EP3744267A1/en active Pending
- 2017-04-04 PL PL17718664T patent/PL3439564T3/pl unknown
- 2017-04-04 JP JP2019502552A patent/JP7046906B2/ja active Active
- 2017-04-04 WO PCT/US2017/025952 patent/WO2017176761A1/en active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150351854A1 (en) | 2003-05-23 | 2015-12-10 | Intuitive Surgical Operations, Inc. | Tool With Articulation Lock |
| JP2012516754A (ja) | 2009-02-05 | 2012-07-26 | エシコン・エンド−サージェリィ・インコーポレイテッド | 外科用ステープリング器具 |
| US20150320437A1 (en) | 2014-04-22 | 2015-11-12 | Ethicon Endo-Surgery, Inc. | Method of operating an articulating ultrasonic surgical instrument |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109069177A (zh) | 2018-12-21 |
| EP3439564B1 (en) | 2020-07-22 |
| WO2017176761A1 (en) | 2017-10-12 |
| CN109069177B (zh) | 2021-10-19 |
| BR112018070136A2 (pt) | 2019-02-05 |
| EP3744267A1 (en) | 2020-12-02 |
| JP2019513512A (ja) | 2019-05-30 |
| EP3439564A1 (en) | 2019-02-13 |
| BR112018070136B1 (pt) | 2023-03-07 |
| US10575836B2 (en) | 2020-03-03 |
| PL3439564T3 (pl) | 2020-12-28 |
| US20170281220A1 (en) | 2017-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7046906B2 (ja) | 選択的にロックされる関節運動アセンブリを備える外科用器具 | |
| JP6938613B2 (ja) | シャフト回転ノブ内に電動式関節運動駆動部を備えた超音波手術器具 | |
| JP6929931B2 (ja) | ロック可能関節運動駆動車輪を備えた外科用器具 | |
| JP7130800B2 (ja) | 複数の係止位置を有する関節動作ジョイントを備えた超音波手術器具 | |
| JP6896645B2 (ja) | エンドエフェクタ関節運動のための対向型ねじ山駆動を備えた超音波手術器具 | |
| JP7046826B2 (ja) | 手術器具用の関節運動継手 | |
| JP6732792B2 (ja) | 剛性化用関節運動駆動部材を有する超音波手術器具 | |
| JP7086606B2 (ja) | 複数のロック位置を有する回転可能なシャフトを備えた手術器具 | |
| JP6873913B2 (ja) | カーブしたブレードを有する関節運動するエンドエフェクタを備えた超音波外科用器具 | |
| JP6772183B2 (ja) | 移動可能な剛化部材を有する超音波外科用器具 | |
| KR102305647B1 (ko) | 초음파 수술 기구를 위한 관절 특징부 | |
| JP6983803B2 (ja) | デュアルモード関節運動駆動部を有する手術器具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200403 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210317 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210330 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210625 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210713 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211007 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220222 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220323 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7046906 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |