JP7040040B2 - 印刷装置、印刷支援方法及びプログラム - Google Patents
印刷装置、印刷支援方法及びプログラム Download PDFInfo
- Publication number
- JP7040040B2 JP7040040B2 JP2018008144A JP2018008144A JP7040040B2 JP 7040040 B2 JP7040040 B2 JP 7040040B2 JP 2018008144 A JP2018008144 A JP 2018008144A JP 2018008144 A JP2018008144 A JP 2018008144A JP 7040040 B2 JP7040040 B2 JP 7040040B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- printing
- input
- scanning
- difference
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Printers Characterized By Their Purpose (AREA)
Description
また、本発明に係る第2の態様の印刷装置は、ノズルが第1の方向に配列された印刷ヘッドを備えた印刷装置であって、前記印刷装置が前記第1の方向に直交する第2の方向に移動された移動距離を検出する移動距離検出手段と、前記印刷装置を前記第2の方向に基準距離だけ移動させたことを示すユーザからの第1入力を受け付ける入力手段と、前記入力手段によってユーザからの前記第1入力を受け付けた場合に、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であるか否かを判定する判定手段と、前記判定手段により、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であると判定された場合に、印刷の開始を取りやめる制御手段と、を備えることを特徴とする。
また、本発明に係る第1の態様の印刷支援方法は、ノズルが第1の方向に配列された印刷ヘッドを備えた印刷装置が実行する印刷支援方法であって、前記印刷装置が前記第1の方向に直交する第2の方向に移動された移動距離を検出する移動距離検出処理と、前記印刷装置を前記第2の方向に基準距離だけ移動させたことを示すユーザからの入力を受け付ける受付処理と、前記受付処理によってユーザからの前記入力を受け付けた場合に、前記移動距離検出処理で検出された移動距離と前記基準距離との差が基準値以上であるか否かを判定する判定処理と、前記判定処理で、前記移動距離検出処理で検出された移動距離と前記基準距離との差が基準値以上であると判定された場合に、その旨を報知する報知処理と、を含むことを特徴とする。
また、本発明に係る第2の態様の印刷支援方法は、ノズルが第1の方向に配列された印刷ヘッドを備えた印刷装置が実行する印刷支援方法であって、前記印刷装置が前記第1の方向に直交する第2の方向に移動された移動距離を検出する移動距離検出処理と、前記印刷装置を前記第2の方向に基準距離だけ移動させたことを示すユーザからの入力を受け付ける受付処理と、前記受付処理によってユーザからの前記入力を受け付けた場合に、前記移動距離検出処理で検出された移動距離と前記基準距離との差が基準値以上であるか否かを判定する判定処理と、前記判定処理で、前記移動距離検出処理で検出された移動距離と前記基準距離との差が基準値以上であると判定された場合に、印刷の開始を取りやめる制御処理と、を含むことを特徴とする。
また、本発明に係る第1の態様のプログラムは、ノズルが第1の方向に配列された印刷ヘッドを備えた印刷装置のコンピュータを、前記印刷装置が前記第1の方向に直交する第2の方向に移動された移動距離を検出する移動距離検出手段、前記印刷装置を前記第2の方向に基準距離だけ移動させたことを示すユーザからの入力を受け付ける受付手段、前記受付手段によってユーザからの前記入力を受け付けた場合に、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であるか否かを判定する判定手段、前記判定手段により、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であると判定された場合に、その旨を報知手段に報知させる制御手段、として機能させることを特徴とする。
また、本発明に係る第2の態様のプログラムは、ノズルが第1の方向に配列された印刷ヘッドを備えた印刷装置のコンピュータを、前記印刷装置が前記第1の方向に直交する第2の方向に移動された移動距離を検出する移動距離検出手段、前記印刷装置を前記第2の方向に基準距離だけ移動させたことを示すユーザからの入力を受け付ける受付手段、前記受付手段によってユーザからの前記入力を受け付けた場合に、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であるか否かを判定する判定手段、前記判定手段により、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であると判定された場合に、印刷の開始を取りやめる制御手段、として機能させることを特徴とする。
一方、走査距離判定部113は、差が基準値N未満であると判定すると、印刷ヘッド制御部114の制御により印刷ヘッド150に印刷対象画像の印刷を開始させる。走査距離判定部113は、決定ボタン120が押されてからハンディプリンタ100が基準距離d2走査されたと判定すると、マゼンタ色印刷ヘッド150Mに印刷を開始させる。走査距離判定部113は、基準距離d3走査されたと判定すると、シアン色印刷ヘッド150Cに印刷を開始させ、基準距離d4走査されたと判定すると、黄色印刷ヘッド150Yに印刷を開始させる。
上述の実施の形態では、走査距離検出部140が、LEDなどの光源と、光学センサとから構成される例について説明したが、走査距離検出部140は、ハンディプリンタ100が副走査方向に走査された距離を検出することができるものであれば限定されない。例えば、走査距離検出部140は、走査ローラと、走査ローラの回転を検知するエンコーダと、から構成されるものであってもよい。この場合であっても、走査ローラが滑って空回りし、走査距離が正しく検出できない場合に印刷を中止またはユーザにインジケータ130で知らせることができる。
印刷ヘッドと、
前記印刷ヘッドを備える筐体と、
前記筐体が副走査方向に走査された走査距離を検出する走査距離検出手段と、
前記筐体が前記副走査方向に基準距離走査されたことを示す入力を受け付ける入力手段と、
前記入力手段によって前記基準距離走査されたことを示す入力を受け付けた場合に、前記走査距離検出手段により検出された走査距離と前記基準距離との差が基準値以上であるか否かを判定する判定手段と、
を備えることを特徴とする印刷装置。
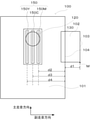
前記筐体に設けられ、前記基準距離を指示する基準距離指示部を更に備え、
前記入力手段は、前記筐体の走査を開始する入力と、前記筐体が前記副走査方向に前記基準距離走査されたことを示す入力と、を受け付け、
前記走査距離検出手段は、
前記入力手段が走査を開始する入力を受け付けてから、前記筐体が前記基準距離走査されたことを示す入力を受け付けるまでに、検出した距離を前記検出された走査距離として検出する、
ことを特徴とする付記1に記載の印刷装置。
前記基準距離指示部は、第1の基準位置と第2の基準位置とを示し、
前記副走査方向における第1の基準位置と第2の基準位置との距離は、前記基準距離である、
ことを特徴とする付記2に記載の印刷装置。
前記基準距離指示部は、板状部材から構成され、前記筐体を印刷媒体の上に置いたとき、前記印刷媒体に添うように取り付けられる、
ことを特徴とする付記2または3に記載の印刷装置。
前記判定手段により、前記走査距離検出手段により検出された走査距離と前記基準距離との差が基準値以上であると判定されると、その旨を報知する報知手段を更に備えることを特徴とする付記1から4の何れか1つに記載の印刷装置。
前記報知手段は、前記判定手段により、前記走査距離検出手段により検出された走査距離と前記基準距離との差が前記基準値以上であると判定されると、印刷を中止する、
ことを特徴する付記5に記載の印刷装置。
前記判定手段は、前記走査距離検出手段により検出された走査距離と前記基準距離との差が、第1の基準値以上であるか否か、および、前記第1の基準値より小さく、第1の基準値より小さい第2の基準値以上であるか否かを判定し、
前記報知手段は、前記判定手段により、前記走査距離検出手段により検出された走査距離と前記基準距離との差が前記第1の基準値以上であると判定されると、印刷を中止し、前記走査距離検出手段により検出された走査距離と前記基準距離との差が前記第1の基準値未満であり、前記第2の基準値以上であると判定されると、その旨を報知する、
ことを特徴とする付記5または6に記載の印刷装置。
印刷ヘッドと、
前記印刷ヘッドを備える筐体と、
前記筐体が副走査方向に走査された第1の走査距離を検出する第1の走査距離検出手段と、
前記筐体が前記副走査方向に走査された第2の走査距離を検出する第2の走査距離検出手段と、
前記第1の走査距離と前記第2の走査距離との差が基準値以上であるか否かを判定する判定手段と、
を備えることを特徴とする印刷装置。
印刷ヘッドと、
前記印刷ヘッドを備える筐体と、を備える印刷装置を用いて印刷する印刷方法であって、
前記筐体が副走査方向に走査された走査距離を検出し、
前記筐体が前記副走査方向に基準距離走査されたことを示す入力を受け付け、
前記基準距離走査されたことを示す入力を受け付けた場合に、検出された走査距離と前記基準距離との差が基準値以上であるか否かを判定する、
ことを特徴とする印刷方法。
印刷ヘッドと、
前記印刷ヘッドを備える筐体と、を備える印刷装置を制御するコンピュータを、
前記筐体が副走査方向に走査された走査距離を検出する走査距離検出手段、
前記筐体が前記副走査方向に基準距離走査されたことを示す入力を受け付ける入力手段、
前記入力手段によって前記基準距離走査されたことを示す入力を受け付けた場合に、前記走査距離検出手段により検出された走査距離と前記基準距離との差が基準値以上であるか否かを判定する判定手段、
として機能させるプログラム。
Claims (8)
- ノズルが第1の方向に配列された印刷ヘッドを備えた印刷装置であって、
前記印刷装置が前記第1の方向に直交する第2の方向に移動された移動距離を検出する移動距離検出手段と、
前記印刷装置を前記第2の方向に基準距離だけ移動させたことを示すユーザからの第1入力を受け付ける入力手段と、
前記入力手段によってユーザからの前記第1入力を受け付けた場合に、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であるか否かを判定する判定手段と、
前記判定手段により、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であると判定された場合に、その旨を報知する報知手段と、
を備えることを特徴とする印刷装置。 - ノズルが第1の方向に配列された印刷ヘッドを備えた印刷装置であって、
前記印刷装置が前記第1の方向に直交する第2の方向に移動された移動距離を検出する移動距離検出手段と、
前記印刷装置を前記第2の方向に基準距離だけ移動させたことを示すユーザからの第1入力を受け付ける入力手段と、
前記入力手段によってユーザからの前記第1入力を受け付けた場合に、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であるか否かを判定する判定手段と、
前記判定手段により、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であると判定された場合に、印刷の開始を取りやめる制御手段と、
を備えることを特徴とする印刷装置。 - 前記入力手段は、前記印刷装置の前記第2の方向への移動開始を示すユーザからの第2入力を受け付け、
前記移動距離検出手段は、前記入力手段により前記第2入力を受け付けてから前記第1入力を受け付けるまでの前記移動距離を検出する、
ことを特徴とする請求項1または2に記載の印刷装置。 - 前記基準距離を示す板状の部材が取り付けられている、
ことを特徴とする請求項1から3の何れか1項に記載の印刷装置。 - ノズルが第1の方向に配列された印刷ヘッドを備えた印刷装置が実行する印刷支援方法であって、
前記印刷装置が前記第1の方向に直交する第2の方向に移動された移動距離を検出する移動距離検出処理と、
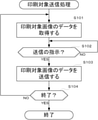
前記印刷装置を前記第2の方向に基準距離だけ移動させたことを示すユーザからの入力を受け付ける受付処理と、
前記受付処理によってユーザからの前記入力を受け付けた場合に、前記移動距離検出処理で検出された移動距離と前記基準距離との差が基準値以上であるか否かを判定する判定処理と、
前記判定処理で、前記移動距離検出処理で検出された移動距離と前記基準距離との差が基準値以上であると判定された場合に、その旨を報知する報知処理と、
を含むことを特徴とする印刷支援方法。 - ノズルが第1の方向に配列された印刷ヘッドを備えた印刷装置が実行する印刷支援方法であって、
前記印刷装置が前記第1の方向に直交する第2の方向に移動された移動距離を検出する移動距離検出処理と、
前記印刷装置を前記第2の方向に基準距離だけ移動させたことを示すユーザからの入力を受け付ける受付処理と、
前記受付処理によってユーザからの前記入力を受け付けた場合に、前記移動距離検出処理で検出された移動距離と前記基準距離との差が基準値以上であるか否かを判定する判定処理と、
前記判定処理で、前記移動距離検出処理で検出された移動距離と前記基準距離との差が基準値以上であると判定された場合に、印刷の開始を取りやめる制御処理と、
を含むことを特徴とする印刷支援方法。 - ノズルが第1の方向に配列された印刷ヘッドを備えた印刷装置のコンピュータを、
前記印刷装置が前記第1の方向に直交する第2の方向に移動された移動距離を検出する移動距離検出手段、
前記印刷装置を前記第2の方向に基準距離だけ移動させたことを示すユーザからの入力を受け付ける受付手段、
前記受付手段によってユーザからの前記入力を受け付けた場合に、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であるか否かを判定する判定手段、
前記判定手段により、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であると判定された場合に、その旨を報知手段に報知させる制御手段、
として機能させることを特徴とするプログラム。 - ノズルが第1の方向に配列された印刷ヘッドを備えた印刷装置のコンピュータを、
前記印刷装置が前記第1の方向に直交する第2の方向に移動された移動距離を検出する移動距離検出手段、
前記印刷装置を前記第2の方向に基準距離だけ移動させたことを示すユーザからの入力を受け付ける受付手段、
前記受付手段によってユーザからの前記入力を受け付けた場合に、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であるか否かを判定する判定手段、
前記判定手段により、前記移動距離検出手段により検出された移動距離と前記基準距離との差が基準値以上であると判定された場合に、印刷の開始を取りやめる制御手段、
として機能させることを特徴とするプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018008144A JP7040040B2 (ja) | 2018-01-22 | 2018-01-22 | 印刷装置、印刷支援方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018008144A JP7040040B2 (ja) | 2018-01-22 | 2018-01-22 | 印刷装置、印刷支援方法及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019126917A JP2019126917A (ja) | 2019-08-01 |
| JP2019126917A5 JP2019126917A5 (ja) | 2021-01-28 |
| JP7040040B2 true JP7040040B2 (ja) | 2022-03-23 |
Family
ID=67472675
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018008144A Active JP7040040B2 (ja) | 2018-01-22 | 2018-01-22 | 印刷装置、印刷支援方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7040040B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020040274A (ja) * | 2018-09-10 | 2020-03-19 | 株式会社リコー | 携帯型画像形成装置 |
| JP7415598B2 (ja) * | 2020-01-29 | 2024-01-17 | セイコーエプソン株式会社 | 印刷装置および印刷装置の制御方法 |
| JP7499122B2 (ja) | 2020-09-07 | 2024-06-13 | 東芝テック株式会社 | モバイルプリンタ |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070139507A1 (en) | 2005-12-20 | 2007-06-21 | Ahne Adam J | Hand-operated printer having a user interface |
| JP2008012748A (ja) | 2006-07-05 | 2008-01-24 | Graphtec Corp | 手動式記録装置のガイド部材および手動式記録装置の記録方法 |
| JP2010188679A (ja) | 2009-02-20 | 2010-09-02 | Casio Computer Co Ltd | テープ印刷装置、テープ印刷装置における取込画像の修正方法、該修正方法を実行するためのプログラムが記憶された記憶媒体 |
| JP2017170634A (ja) | 2016-03-18 | 2017-09-28 | 株式会社リコー | 位置検出装置、液滴吐出装置、プログラム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09314920A (ja) * | 1996-06-04 | 1997-12-09 | Brother Ind Ltd | 印字装置 |
| JPH1086453A (ja) * | 1996-09-12 | 1998-04-07 | Brother Ind Ltd | 印字装置 |
-
2018
- 2018-01-22 JP JP2018008144A patent/JP7040040B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070139507A1 (en) | 2005-12-20 | 2007-06-21 | Ahne Adam J | Hand-operated printer having a user interface |
| JP2008012748A (ja) | 2006-07-05 | 2008-01-24 | Graphtec Corp | 手動式記録装置のガイド部材および手動式記録装置の記録方法 |
| JP2010188679A (ja) | 2009-02-20 | 2010-09-02 | Casio Computer Co Ltd | テープ印刷装置、テープ印刷装置における取込画像の修正方法、該修正方法を実行するためのプログラムが記憶された記憶媒体 |
| JP2017170634A (ja) | 2016-03-18 | 2017-09-28 | 株式会社リコー | 位置検出装置、液滴吐出装置、プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019126917A (ja) | 2019-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109532246B (zh) | 印刷装置、印刷方法及记录介质 | |
| US10308014B2 (en) | Non-transitory recording medium, image forming device, and image forming system | |
| US10377157B2 (en) | Printing device, printing method and recording medium | |
| US10427422B2 (en) | Printing apparatus and printing method of printing apparatus | |
| US10682866B2 (en) | Printing system, printing apparatus, device and recording medium | |
| JP7040040B2 (ja) | 印刷装置、印刷支援方法及びプログラム | |
| JP2017170807A (ja) | 印刷補助装置、印刷装置、印刷システム、報知方法及びプログラム | |
| US20200062012A1 (en) | Printing device, printing system, printing method, and recording medium | |
| JP6743424B2 (ja) | 印刷装置、印刷方法及びプログラム | |
| JP6724464B2 (ja) | 印刷補助装置、印刷装置、印刷システム、印刷補助方法及びプログラム | |
| US20180178508A1 (en) | Printing apparatus, printing method, and non-transitory computer-readable recording medium | |
| CN111251727B (zh) | 印刷装置、印刷方法以及记录介质 | |
| JP7099583B2 (ja) | 印刷装置、印刷方法及びプログラム | |
| JP7006247B2 (ja) | 印刷装置、印刷システム、印刷方法及びプログラム | |
| JP7056282B2 (ja) | ハンディプリンタ、印刷方法及びプログラム | |
| US11364728B2 (en) | Printing device | |
| JP6954421B2 (ja) | 印刷装置、印刷方法及びプログラム | |
| JP7173381B2 (ja) | 印刷装置、印刷方法及びプログラム | |
| JP2019166661A (ja) | 印刷装置、印刷システム、印刷方法及びプログラム | |
| JP2007102328A (ja) | 印刷システム、印刷方法及びプログラム | |
| JP2018099832A (ja) | 印刷装置、印刷方法及びプログラム | |
| US9019517B2 (en) | Image reading apparatus, image forming system, and method for performing image and transport calibration | |
| JP7151386B2 (ja) | 印刷装置、印刷支援方法及びプログラム | |
| JP2017170761A (ja) | 印刷装置、印刷方法及びプログラム | |
| JP2020175618A (ja) | 印刷装置、印刷システム、印刷方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201214 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211013 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211119 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220221 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7040040 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |