JP6991208B2 - トラック上を走行するロボットの移動制御 - Google Patents
トラック上を走行するロボットの移動制御 Download PDFInfo
- Publication number
- JP6991208B2 JP6991208B2 JP2019522218A JP2019522218A JP6991208B2 JP 6991208 B2 JP6991208 B2 JP 6991208B2 JP 2019522218 A JP2019522218 A JP 2019522218A JP 2019522218 A JP2019522218 A JP 2019522218A JP 6991208 B2 JP6991208 B2 JP 6991208B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- controller
- speed
- wheel
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 claims description 27
- 230000001133 acceleration Effects 0.000 claims description 13
- 230000001360 synchronised effect Effects 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 2
- 230000003028 elevating effect Effects 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
Images


Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0272—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means comprising means for registering the travel distance, e.g. revolutions of wheels
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0227—Control of position or course in two dimensions specially adapted to land vehicles using mechanical sensing means, e.g. for sensing treated area
- G05D1/0229—Control of position or course in two dimensions specially adapted to land vehicles using mechanical sensing means, e.g. for sensing treated area in combination with fixed guiding means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0464—Storage devices mechanical with access from above
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0492—Storage devices mechanical with cars adapted to travel in storage aisles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/418—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM]
- G05B19/4189—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] characterised by the transport system
- G05B19/41895—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] characterised by the transport system using automatic guided vehicles [AGV]
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Robotics (AREA)
- Quality & Reliability (AREA)
- Manufacturing & Machinery (AREA)
- General Engineering & Computer Science (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Manipulator (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
-ロボットの開始位置および停止位置を受信するステップと、
-各車輪の現在の速度および角位置をローカルコントローラから受信するステップと、
-フレーム構造に対するロボットのグローバル位置を受信するステップと、
-各車輪の現在の速度および角位置と、ロボットの現在のグローバル位置と、ロボットの開始位置および停止位置とに基づいて、車輪の各対に対して個々の速度駆動シーケンスを設定するステップと、
-車輪の各対の加速および減速を制御するために、速度駆動シーケンスをローカルコントローラのそれぞれに伝送するステップと、
-開始位置から停止位置までのロボットの移動を制御するために、上記のステップを繰り返すステップと、
が、ローカルコントローラのそれぞれと通信するマスタコントローラ内で実施される。
-ロボットの開始位置および停止位置と、ローカルコントローラによって提供される、各車輪の現在の速度および角位置とを受信するための入力手段と、
-フレーム構造に対するロボットのグローバル位置を受信するための入力手段と、
-各車輪の現在の速度および角位置と、ロボットの現在のグローバル位置と、ロボットの開始位置および停止位置とに基づいて、車輪の各対に対して個々の速度駆動シーケンスを設定するための計算手段と、
-速度駆動シーケンスを車輪の各対の加速および減速を制御するローカルコントローラのそれぞれに伝送するための出力手段と、
を備える。
本発明は、例えば、以下を提供する。
(項目1)
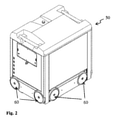
開始位置から停止位置までのロボット50の移動を制御するための方法であって、上記ロボット50は、グリッド40を形成するフレーム構造上に敷設されたトラック20上を移動し、上記ロボット50は、各車輪60に対して個々の駆動手段Drive 1 、Drive 2 、Drive 3 、Drive 4 に接続される、ローカルコントローラController 1-2 、Controller 3-4 によって制御される、車輪の対W 1-2 およびW 3-4 を有し、
車輪の対W 1-2 およびW 3-4 を制御する上記ローカルコントローラController 1-2 、Controller 3-4 に接続される速度および角位置センサを用いて、各車輪60を監視することを特徴とし、以下のステップ、すなわち、
-上記ロボット50の開始位置および停止位置を受信するステップと、
-各車輪60の現在の速度および角位置を上記ローカルコントローラController 1-2 、Controller 3-4 から受信するステップと、
-上記フレーム構造に対する上記ロボット50の位置を受信するステップと、
-各車輪60の現在の速度および角位置と、上記ロボット50の現在の位置と、上記ロボット50の開始位置および停止位置とに基づいて、車輪の各対W 1-2 およびW 3-4 に対して速度駆動シーケンスV seq1-2 、V seq3-4 を設定するステップと、
-車輪の各対W 1-2 およびW 3-4 の加速および減速を制御するために、上記速度駆動シーケンスV seq1-2 、V seq3-4 を上記ローカルコントローラController 1-2 、Controller 3-4 のそれぞれに伝送するステップと、
-上記開始位置から上記停止位置までの上記ロボット50の移動を制御するために、上記のステップを繰り返すステップと
が、上記ローカルコントローラController 1-2 、Controller 3-4 のそれぞれと通信するマスタコントローラ内で実施される、方法。
(項目2)
上記ロボット50の位置は、トラックに対する上記ロボット50の外部追跡によって提供される上記ロボット50のグローバルx、y位置である、項目1に記載の方法。
(項目3)
上記ロボット50の位置は、上記トラックに対する上記ロボット50の絶対ローカル位置であって、上記ローカル位置は、上記ロボット50内に備えられる追跡センサによって提供される、項目1に記載の方法。
(項目4)
速度駆動シーケンスは、上記ロボット50を開始位置から移動させるための加速と、上記ロボット50を停止位置に向かって移動させるための減速と、上記ロボット50を上記開始位置と停止位置との間で移動させるための一定速度とを定義する、項目1に記載の方法。
(項目5)
各ローカルコントローラController 1-2 、Controller 3-4 は、1つの車輪50の現在の速度が上記速度駆動シーケンスによって設定された上記車輪の対の設定速度から逸脱する場合、車輪の対W 1-2 およびW 3-4 の1つの車輪60の速度を調節する、上記項目のいずれかに記載の方法。
(項目6)
上記速度駆動シーケンスは、所定のレートで伝送される、上記項目のいずれかに記載の方法。
(項目7)
上記速度駆動シーケンスは、上記ロボット50が辿るルートに従って、異なる開始位置および停止位置を備える、上記項目のいずれかに記載の方法。
(項目8)
開始位置から停止位置までのロボット50の移動を制御するためのマスタコントローラであって、上記ロボット50は、グリッド40を形成するフレーム構造上に敷設されたトラック20上を移動し、上記ロボット50は、各車輪60に対して個々の駆動手段Drive 1 、Drive 2 、Drive 3 、Drive 4 に接続されるローカルコントローラController 1-2 、Controller 3-4 によって制御される、車輪の対W 1-2 およびW 3-4 を有し、
上記マスタコントローラは、車輪の各対W 1-2 およびW 3-4 を制御する上記ローカルコントローラController 1-2 、Controller 3-4 に接続されることを特徴とし、上記ローカルコントローラController 1-2 、Controller 3-4 は、上記ローカルコントローラController 1-2 、Controller 3-4 に接続される速度および角度センサを用いて、各車輪60の速度および角位置を上記マスタコントローラに提供し、上記マスタコントローラは、
-上記ロボット50の開始位置および停止位置と、上記ローカルコントローラController 1-2 、Controller 3-4 によって提供される、各車輪60の現在の速度および角位置とを受信するための入力手段と、
-上記フレーム構造に対する上記ロボット50の位置を受信するための入力手段と、
-各車輪60の現在の速度および角位置と、上記ロボット50の現在の位置と、上記ロボット50の開始位置および停止位置とに基づいて、車輪60の各対W 1-2 およびW 3-4 に対して速度駆動シーケンスV seq1-2 、V seq3-4 を設定するための計算手段と、
-車輪60の各対W 1-2 およびW 3-4 の加速および減速を制御するために、上記速度駆動シーケンスV seq1-2 、V seq3-4 を上記ローカルコントローラController 1-2 、Controller 3-4 のそれぞれに伝送するための出力手段と
を備える、マスタコントローラ。
(項目9)
上記ロボット50内に備えられる追跡センサに接続されることを特徴とする、項目8に記載のコントローラ。
(項目10)
上記ロボット50内に具現化されることを特徴とする、項目8または9に記載のコントローラ。
(項目11)
プロセッサによって実行されると、項目1-7に記載の方法を実施する、ソフトウェアプログラム製品。
Claims (10)
- 開始位置から停止位置までのロボット(50)の移動を制御し、グリッド(40)を形成するフレーム構造上に敷設されたトラック(20)上を移動する間の進み角度からずれた前記ロボット(50)の移動を防止するための方法であって、前記ロボット(50)は、各車輪(60)に対して個々の駆動手段Drive1、Drive2、Drive3、Drive4に接続される、ローカルコントローラController1-2、Controller3-4によって制御される、車輪の対W1-2およびW3-4を有し、前記方法は、
a)前記車輪の各対W1-2およびW3-4を制御する前記ローカルコントローラController1-2、Controller3-4に接続される速度および角位置センサを用いて、各車輪(60)を監視するステップ
を含み、以下のステップ、すなわち、
b)前記ロボット(50)の開始位置および停止位置を受信するステップと、
c)前記車輪の対の各車輪(60)の現在の速度および角位置を前記ローカルコントローラController1-2、Controller3-4から受信するステップと、
d)前記フレーム構造に対する前記ロボット(50)の位置を受信するステップと
が、前記ローカルコントローラController1-2、Controller3-4のそれぞれと通信するマスタコントローラ内で実施され、
e)各車輪(60)の前記現在の速度および前記角位置と、前記ロボット(50)の前記受信された位置と、前記ロボット(50)の前記開始位置および停止位置とに基づいて、駆動方向に対して法線方向の同一軸に沿った車輪の各対W1-2およびW3-4に対して加速、一定速度、および減速を定義する速度データを含む速度駆動シーケンスVseq1-2、Vseq3-4を設定するステップと、
f)車輪の各対W1-2およびW3-4の加速および減速を制御するために、前記速度駆動シーケンスVseq1-2、Vseq3-4を前記ローカルコントローラController1-2、Controller3-4のそれぞれに伝送するステップであって、各ローカルコントローラController1-2、Controller3-4は、1つの車輪(60)の現在の速度が前記速度駆動シーケンスVseq1-2、Vseq3-4によって設定された前記車輪の対W1-2およびW3-4の設定速度から逸脱する場合、前記車輪の対W1-2およびW3-4の前記1つの車輪(60)の速度を調節し、これにより、前記車輪の対W1-2およびW3-4を同期させる、ステップと、
g)前記開始位置から前記停止位置までの前記ロボット(50)の移動を制御するために、ステップc)~f)を繰り返すステップと
を特徴とする、方法。 - 前記ロボット(50)の位置は、トラックに対する前記ロボット(50)の外部追跡によって提供される前記ロボット(50)のグローバルx、y位置である、請求項1に記載の方法。
- 前記ロボット(50)の位置は、前記トラックに対する前記ロボット(50)の絶対ローカル位置であり、前記絶対ローカル位置は、前記ロボット(50)内に備えられる追跡センサによって提供される、請求項1に記載の方法。
- 前記速度駆動シーケンスVseq1-2、Vseq3-4は、前記ロボット(50)を前記開始位置から移動させるための加速と、前記ロボット(50)を前記停止位置に向かって移動させるための減速と、前記ロボット(50)を前記開始位置と停止位置との間で移動させるための一定速度とを定義する、請求項1に記載の方法。
- 前記速度駆動シーケンスは、所定のレートで伝送される、請求項1~4のいずれか一項に記載の方法。
- 前記速度駆動シーケンスは、前記ロボット(50)が辿るルートに従って、異なる開始位置および停止位置を備える、請求項1~5のいずれか一項に記載の方法。
- 開始位置から停止位置までのロボット(50)の移動を制御し、グリッド(40)を形成するフレーム構造上に敷設されたトラック(20)上を移動する間の前記ロボット(50)の進み角度からずれた移動を防止するマスタコントローラであって、前記ロボット(50)は、各車輪(60)に対して個々の駆動手段Drive1、Drive2、Drive3、Drive4に接続されるローカルコントローラController1-2、Controller3-4によって制御される、車輪の対W1-2およびW3-4を有し、
前記マスタコントローラは、前記車輪の各対W1-2およびW3-4を制御する前記ローカルコントローラController1-2、Controller3-4に接続され、前記ローカルコントローラController1-2、Controller3-4は、前記ローカルコントローラController1-2、Controller3-4に接続される速度および角度センサを用いて、各車輪(60)の速度および角位置を前記マスタコントローラに提供し、前記マスタコントローラは、
-前記ロボット(50)の開始位置および停止位置と、前記ローカルコントローラController1-2、Controller3-4によって提供される、前記車輪の対の各車輪(60)の現在の速度および角位置とを受信するように構成される入力手段と、
-前記フレーム構造に対する前記ロボット(50)の位置を受信するように構成される入力手段と
を備え、
-各車輪(60)の前記現在の速度および角位置と、前記ロボット(50)の前記受信された位置と、前記ロボット(50)の前記開始位置および停止位置とに基づいて、駆動方向に対して法線方向の同一軸に沿った車輪の各対W1-2およびW3-4に対して加速、一定速度、および減速を定義する速度データを含む速度駆動シーケンスVseq1-2、Vseq3-4を設定するように構成される計算手段と、
-車輪の各対W1-2およびW3-4の加速および減速を制御するために、前記速度駆動シーケンスVseq1-2、Vseq3-4を前記ローカルコントローラController1-2、Controller3-4のそれぞれに伝送するように構成される出力手段であって、各ローカルコントローラController1-2、Controller3-4は、1つの車輪(60)の現在の速度が前記速度駆動シーケンスVseq1-2、Vseq3-4によって設定された前記車輪の対W1-2およびW3-4の設定速度から逸脱する場合、前記車輪の対W1-2およびW3-4の前記1つの車輪(60)の速度を調節し、これにより、前記車輪の対W1-2およびW3-4を同期させるように適合されている、出力手段と
をさらに備えることを特徴とする、マスタコントローラ。 - 前記ロボット(50)内に備えられる追跡センサに接続されることを特徴とする、請求項7に記載のコントローラ。
- 前記ロボット(50)内に具現化されることを特徴とする、請求項7または8に記載のコントローラ。
- 命令を備えるソフトウェアプログラム製品であって、前記命令は、前記プログラムがプロセッサによって実行されると、請求項1-6に記載の方法を前記プロセッサに実行させる、ソフトウェアプログラム製品。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021198387A JP2022022332A (ja) | 2016-11-02 | 2021-12-07 | トラック上を走行するロボットの移動制御 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| NO20161733 | 2016-11-02 | ||
| NO20161733A NO342037B1 (en) | 2016-11-02 | 2016-11-02 | Controlling movements of a robot running on tracks |
| PCT/EP2017/077171 WO2018082971A1 (en) | 2016-11-02 | 2017-10-24 | Controlling movements of a robot running on tracks |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021198387A Division JP2022022332A (ja) | 2016-11-02 | 2021-12-07 | トラック上を走行するロボットの移動制御 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019533857A JP2019533857A (ja) | 2019-11-21 |
| JP2019533857A5 JP2019533857A5 (ja) | 2021-07-26 |
| JP6991208B2 true JP6991208B2 (ja) | 2022-01-12 |
Family
ID=60182569
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019522218A Active JP6991208B2 (ja) | 2016-11-02 | 2017-10-24 | トラック上を走行するロボットの移動制御 |
| JP2021198387A Pending JP2022022332A (ja) | 2016-11-02 | 2021-12-07 | トラック上を走行するロボットの移動制御 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021198387A Pending JP2022022332A (ja) | 2016-11-02 | 2021-12-07 | トラック上を走行するロボットの移動制御 |
Country Status (12)
| Country | Link |
|---|---|
| US (2) | US11225377B2 (ja) |
| EP (1) | EP3535633B1 (ja) |
| JP (2) | JP6991208B2 (ja) |
| CN (2) | CN114690774A (ja) |
| CA (1) | CA3039839A1 (ja) |
| DE (1) | DE202017007689U1 (ja) |
| DK (1) | DK3535633T3 (ja) |
| ES (1) | ES2812337T3 (ja) |
| NO (1) | NO342037B1 (ja) |
| PL (1) | PL3535633T3 (ja) |
| TW (1) | TW201818171A (ja) |
| WO (1) | WO2018082971A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD897623S1 (en) * | 2017-02-17 | 2020-09-29 | Autostore Technology AS | Dual track |
| USD934324S1 (en) * | 2019-06-17 | 2021-10-26 | Autostore Technology AS | Autonomous transport robot |
| NO345453B1 (en) * | 2019-06-28 | 2021-02-08 | Autostore Tech As | System and method for light communication in a storage system |
| GB202008292D0 (en) * | 2020-06-02 | 2020-07-15 | Ocado Innovation Ltd | Load-handling device |
| GB2604225B (en) | 2020-12-24 | 2023-05-31 | Ocado Innovation Ltd | Motion control of a robotic load handling device |
| NO347372B1 (en) | 2022-03-23 | 2023-10-02 | Autostore Tech As | A remotely operated vehicle for an automated storage and retrieval system |
| GR1010541B (el) * | 2023-02-28 | 2023-09-13 | Θωμας Δημητριου Στογιαννης | Συστημα εκπληρωσης παραγγελιων σε αυτοματοποιημενη αποθηκη με ρομποτ |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004157885A (ja) | 2002-11-08 | 2004-06-03 | Daifuku Co Ltd | 移動体の位置検出装置 |
| JP2012173760A (ja) | 2011-02-17 | 2012-09-10 | Murata Mach Ltd | 搬送車システム |
| JP2014006833A (ja) | 2012-06-27 | 2014-01-16 | Murata Mach Ltd | 自律移動装置、自律移動方法、標識、及び、自律移動システム |
| WO2015193278A1 (en) | 2014-06-19 | 2015-12-23 | Jakob Hatteland Logistics As | Robot for transporting storage bins |
Family Cites Families (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5281901A (en) * | 1990-12-03 | 1994-01-25 | Eaton-Kenway, Inc. | Downward compatible AGV system and methods |
| JPH08324772A (ja) * | 1995-06-05 | 1996-12-10 | Shin Meiwa Ind Co Ltd | ワーク搬送装置 |
| JPH1011140A (ja) * | 1996-06-27 | 1998-01-16 | Nissan Motor Co Ltd | 無人搬送台車の走行制御方法および走行制御装置 |
| JPH1097321A (ja) * | 1996-09-24 | 1998-04-14 | Mitsubishi Heavy Ind Ltd | 無人搬送車の走行制御装置 |
| NO972004D0 (no) | 1997-04-30 | 1997-04-30 | Hatteland Electronic As Jacob | Metode for organisering av vareflyt for en horisontalt lagdelt og dypstablet lagerbeholdning med uensartede komponenter, samt forflytningsutstyr for standariserte beholdere til formålet |
| NO317366B1 (no) | 1999-07-01 | 2004-10-18 | Autostore As | Lagringsanlegg med fjernstyrte vogner med to hjulsett og heisinnretning for drift på skinner anlagt i kryss over kolonner av lagringsenheter som er adskilt med vertikale profilstolper |
| DE10137443A1 (de) * | 2001-07-27 | 2003-03-06 | Bombardier Transp Gmbh | Verfahren und Vorrichtung zur aktiven Radialsteuerung von Radpaaren oder Radsätzen von Fahrzeugen |
| JP2004094501A (ja) * | 2002-08-30 | 2004-03-25 | Meidensha Corp | 全方位走行無人搬送車のスピンターン制御方法 |
| JP4363177B2 (ja) * | 2003-01-31 | 2009-11-11 | 日本ビクター株式会社 | 移動ロボット |
| AU2003900861A0 (en) * | 2003-02-26 | 2003-03-13 | Silverbrook Research Pty Ltd | Methods,systems and apparatus (NPS042) |
| US7960935B2 (en) * | 2003-07-08 | 2011-06-14 | The Board Of Regents Of The University Of Nebraska | Robotic devices with agent delivery components and related methods |
| CN1289268C (zh) * | 2003-11-18 | 2006-12-13 | 中国科学院自动化研究所 | 一种移动机器人平台的驱动结构和驱动方法 |
| CN100421882C (zh) * | 2005-09-22 | 2008-10-01 | 上海交通大学 | 自立式动态平衡移动机器人 |
| TWI290881B (en) * | 2005-12-26 | 2007-12-11 | Ind Tech Res Inst | Mobile robot platform and method for sensing movement of the same |
| JP2007293389A (ja) * | 2006-04-20 | 2007-11-08 | Murata Mach Ltd | 搬送車とその初期値入力方法 |
| US20130302132A1 (en) | 2012-05-14 | 2013-11-14 | Kiva Systems, Inc. | System and Method for Maneuvering a Mobile Drive Unit |
| AU2009214833B2 (en) * | 2008-02-15 | 2013-02-07 | Schaffler International Pty Limited | Traction control system and method |
| KR100886113B1 (ko) * | 2008-11-12 | 2009-02-27 | 주식회사 포엠 | 6개의 옴니휠을 구비하는 3 자유도 이동로봇과 그 제어방법 |
| JP4821865B2 (ja) * | 2009-02-18 | 2011-11-24 | ソニー株式会社 | ロボット装置及びその制御方法、並びにコンピューター・プログラム |
| CN101647681A (zh) * | 2009-08-26 | 2010-02-17 | 哈尔滨工业大学(威海) | 家用静音型拖地机器人 |
| CN101885350B (zh) | 2010-07-15 | 2012-02-15 | 南京航空航天大学 | 全方位自动导引车的路径自适应跟踪控制方法 |
| US20120316722A1 (en) * | 2010-12-10 | 2012-12-13 | Zeitler David W | Advanced navigation and guidance system and method for an automatic guided vehicle (agv) |
| US8965619B2 (en) | 2010-12-15 | 2015-02-24 | Symbotic, LLC | Bot having high speed stability |
| GB2494444B (en) * | 2011-09-09 | 2013-12-25 | Dyson Technology Ltd | Drive arrangement for a mobile robot |
| CN202703736U (zh) * | 2012-05-10 | 2013-01-30 | 复旦大学 | 六轮步进式机器人全向移动平台 |
| NO335839B1 (no) * | 2012-12-10 | 2015-03-02 | Jakob Hatteland Logistics As | Robot for transport av lagringsbeholdere |
| CN103383570A (zh) | 2013-06-25 | 2013-11-06 | 天奇自动化工程股份有限公司 | 一种可全向移动的自动导航小车 |
| WO2015002539A1 (en) * | 2013-07-05 | 2015-01-08 | Vanderlande Industries B.V. | Vehicle, method for moving such a vehicle, and transport system for objects such as items of luggage |
| GB201314313D0 (en) | 2013-08-09 | 2013-09-25 | Ocado Ltd | Apparatus for retrieving units from a storage system |
| JP6263970B2 (ja) * | 2013-11-11 | 2018-01-24 | 村田機械株式会社 | 自律走行台車、及び、予定走行経路データのデータ構造 |
| NO340313B1 (no) | 2014-01-08 | 2017-03-27 | Jakob Hatteland Logistics As | Fjernstyrt kjøretøy for å plukke opp lagringsbeholdere fra et lagringssystem, lagringssystem for lagring av beholdere og fremgangsmåte for å bytte en strømkilde |
| WO2015134529A1 (en) * | 2014-03-05 | 2015-09-11 | Pas, Llc | Automated lifting storage cart |
| GB201409883D0 (en) * | 2014-06-03 | 2014-07-16 | Ocado Ltd | Methods, systems, and apparatus for controlling movement of transporting devices |
| KR101629649B1 (ko) * | 2014-09-30 | 2016-06-13 | 엘지전자 주식회사 | 로봇 청소기 및 로봇 청소기의 제어방법 |
| DK3050824T3 (da) | 2015-01-28 | 2019-11-04 | Autostore Tech As | Robot til transport af opbevaringsbeholdere |
| US10661991B2 (en) * | 2015-04-15 | 2020-05-26 | Ocado Innovation Limited | Object handling system and method |
| CN105116918A (zh) * | 2015-08-24 | 2015-12-02 | 铜陵学院 | 一种双核两轮中速灭火机器人伺服控制器 |
| CN205059789U (zh) * | 2015-10-26 | 2016-03-02 | 众德迪克科技(北京)有限公司 | 一种全向行进机器人 |
| GB2570119B (en) * | 2018-01-10 | 2022-06-08 | Ocado Innovation Ltd | A controller and method for transporting devices |
-
2016
- 2016-11-02 NO NO20161733A patent/NO342037B1/en unknown
-
2017
- 2017-10-24 PL PL17790754T patent/PL3535633T3/pl unknown
- 2017-10-24 US US16/347,159 patent/US11225377B2/en active Active
- 2017-10-24 ES ES17790754T patent/ES2812337T3/es active Active
- 2017-10-24 WO PCT/EP2017/077171 patent/WO2018082971A1/en unknown
- 2017-10-24 JP JP2019522218A patent/JP6991208B2/ja active Active
- 2017-10-24 CA CA3039839A patent/CA3039839A1/en active Pending
- 2017-10-24 CN CN202210322755.8A patent/CN114690774A/zh active Pending
- 2017-10-24 DE DE202017007689.6U patent/DE202017007689U1/de active Active
- 2017-10-24 EP EP17790754.0A patent/EP3535633B1/en not_active Revoked
- 2017-10-24 CN CN201780067541.8A patent/CN109891350B/zh active Active
- 2017-10-24 DK DK17790754.0T patent/DK3535633T3/da active
- 2017-11-02 TW TW106137865A patent/TW201818171A/zh unknown
-
2021
- 2021-12-07 JP JP2021198387A patent/JP2022022332A/ja active Pending
- 2021-12-08 US US17/643,358 patent/US20220097968A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004157885A (ja) | 2002-11-08 | 2004-06-03 | Daifuku Co Ltd | 移動体の位置検出装置 |
| JP2012173760A (ja) | 2011-02-17 | 2012-09-10 | Murata Mach Ltd | 搬送車システム |
| JP2014006833A (ja) | 2012-06-27 | 2014-01-16 | Murata Mach Ltd | 自律移動装置、自律移動方法、標識、及び、自律移動システム |
| WO2015193278A1 (en) | 2014-06-19 | 2015-12-23 | Jakob Hatteland Logistics As | Robot for transporting storage bins |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019533857A (ja) | 2019-11-21 |
| TW201818171A (zh) | 2018-05-16 |
| US11225377B2 (en) | 2022-01-18 |
| JP2022022332A (ja) | 2022-02-03 |
| CN109891350A (zh) | 2019-06-14 |
| WO2018082971A1 (en) | 2018-05-11 |
| CA3039839A1 (en) | 2018-05-11 |
| DK3535633T3 (da) | 2020-08-24 |
| PL3535633T3 (pl) | 2020-11-16 |
| ES2812337T3 (es) | 2021-03-16 |
| US20190256286A1 (en) | 2019-08-22 |
| CN109891350B (zh) | 2022-05-10 |
| US20220097968A1 (en) | 2022-03-31 |
| DE202017007689U1 (de) | 2024-07-02 |
| NO20161733A1 (en) | 2018-03-19 |
| NO342037B1 (en) | 2018-03-19 |
| EP3535633B1 (en) | 2020-08-05 |
| EP3535633A1 (en) | 2019-09-11 |
| CN114690774A (zh) | 2022-07-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6991208B2 (ja) | トラック上を走行するロボットの移動制御 | |
| JP7486546B2 (ja) | 遠隔操作式車両および車両が走行しているトラックに対する車両の位置を検出するための方法 | |
| US11829144B2 (en) | Mover system | |
| US8700205B2 (en) | Moving stop station for robotic assembly | |
| US9541922B2 (en) | Vehicle control system and vehicle control method | |
| EP2083340B1 (en) | Inverted type movable body and control method thereof | |
| WO2018048641A1 (en) | Velocity control of position-controlled motor controllers | |
| JP7064462B2 (ja) | 車両搬送装置 | |
| JPWO2013014696A1 (ja) | 倒立型移動体制御装置、その制御方法及びプログラム | |
| JP2019533857A5 (ja) | ||
| CA3204768A1 (en) | Motion control of a robotic load handling device | |
| CN203077270U (zh) | 电力库房智能搬运机器人 | |
| CN209765333U (zh) | 一种agv物流运载系统 | |
| EP4071569B1 (en) | System and method for determining real-time orientation on carts in an independent cart system | |
| JP3212345U (ja) | 搬送レールの摩耗検査装置 | |
| KR102291898B1 (ko) | 무인 운반차량 | |
| JP4835429B2 (ja) | スリップ検出システム | |
| JP3688126B2 (ja) | 架空線自走車両 | |
| JP7031807B2 (ja) | クレーンの制御システム及び制御方法 | |
| US20230087375A1 (en) | Robotic stabilization mechanisms and related methods | |
| JPH11139762A (ja) | クラブ旋回型クレーン吊荷の振れ止め方法 | |
| CN115263410A (zh) | 盾构隧道物料运输方法及其运输系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190625 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201022 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210520 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20210520 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210713 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210715 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211004 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211207 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6991208 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |