JP6982612B2 - ステーターおよびこれを含むモーター - Google Patents
ステーターおよびこれを含むモーター Download PDFInfo
- Publication number
- JP6982612B2 JP6982612B2 JP2019511691A JP2019511691A JP6982612B2 JP 6982612 B2 JP6982612 B2 JP 6982612B2 JP 2019511691 A JP2019511691 A JP 2019511691A JP 2019511691 A JP2019511691 A JP 2019511691A JP 6982612 B2 JP6982612 B2 JP 6982612B2
- Authority
- JP
- Japan
- Prior art keywords
- shoe
- groove
- motor
- rotor
- stator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000008859 change Effects 0.000 description 14
- 230000002093 peripheral effect Effects 0.000 description 11
- 230000010349 pulsation Effects 0.000 description 9
- 238000004804 winding Methods 0.000 description 7
- 230000004907 flux Effects 0.000 description 5
- 239000012212 insulator Substances 0.000 description 4
- 230000003993 interaction Effects 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000035699 permeability Effects 0.000 description 3
- 229910000831 Steel Inorganic materials 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images



















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
- H02K1/145—Stator cores with salient poles having an annular coil, e.g. of the claw-pole type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
- H02K21/16—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures having annular armature cores with salient poles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
- H02K1/146—Stator cores with salient poles consisting of a generally annular yoke with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/03—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with a magnetic circuit specially adapted for avoiding torque ripples or self-starting problems
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/46—Fastening of windings on the stator or rotor structure
- H02K3/52—Fastening salient pole windings or connections thereto
- H02K3/521—Fastening salient pole windings or connections thereto applicable to stators only
- H02K3/525—Annular coils, e.g. for cores of the claw-pole type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/003—Couplings; Details of shafts
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Description
10: ベアリング
100: ハウジング
200: ブラケット
300: ステーター
310: ステーターコア
311: ヨーク
312: 歯
313: ボディー
314: シュー
315: 溝
320: コイル
400: ローター
410: ローターコア
420: マグネット
500: 回転軸
600: センシングマグネット組立体
700: 印刷回路基板
Claims (8)
- 回転軸と、
前記回転軸が挿入されるホールを含むローターと、
前記ローターの外側に配置されるステーターと、
を含むモーターであって、
前記ステーターは、
複数の歯を有するステーターコアと、
前記歯に捲線されるコイルを含み、
前記歯は、前記コイルが巻かれるボディーと前記ボディーに繋がるシューを含み、
前記シューは、複数の半円形の溝を含み、
前記シューは、前記ローターのマグネットと対向するように配置され、前記シューの内側面と前記マグネットの外側面との間には、エアギャップ(G)が形成され、
前記溝の横断面の中心C1は、前記シューの一側端点Pから円周方向に一定の角度θ2離隔して配置され、
前記角度θ2は、前記シューの端点と隣接した前記シューの端点が前記回転軸の中心と成す角度θ1の0.45ないし0.55であり、
前記溝の半径(R)は、前記シューの内側面と前記マグネットの外側面との間の前記エアギャップ(G)の間隔Dの0.9から1.1である、
モーター。 - 前記角度θ2は、前記角度θ1の0.5である請求項1に記載のモーター。
- 前記溝は、2つであり、
2つの前記溝は、円周方向を基準とする前記シューの幅中心と前記ステーターコアの中心を経る基準線を基準に対称になるように配置される請求項1または請求項2に記載のモーター。 - 前記溝は、前記ステーターコアの軸方向に沿って配置される請求項1乃至3のいずれか1項に記載のモーター。
- 前記溝の半径Rは、前記ステーターのシューと前記ローターとの間の間隔Dと同一である請求項1乃至4のいずれか1項に記載のモーター。
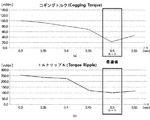
- 単位回転中にコギングトルク波形の振動回数が前記ローターの前記マグネットの数と前記歯の数の最小公倍数の3倍である請求項1乃至5のいずれか1項に記載のモーター。
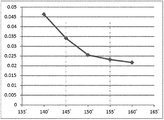
- 前記ボディーの側面と、前記ボディーの側面から繋がる前記シューの側面が成す角度は、145゜ないし155゜である請求項1乃至6のいずれか1項に記載のモーター。
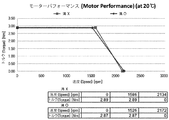
- 9つの歯が前記ステーターコアのヨークに形成され、6つのマグネットが前記ローターのローターコアに配置される、請求項1乃至7のいずれか1項に記載のモーター。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160114086A KR102673752B1 (ko) | 2016-09-05 | 2016-09-05 | 스테이터 및 이를 포함하는 모터 |
| KR10-2016-0114086 | 2016-09-05 | ||
| KR1020170013935A KR20180089173A (ko) | 2017-01-31 | 2017-01-31 | 모터 |
| KR10-2017-0013935 | 2017-01-31 | ||
| PCT/KR2017/009410 WO2018044027A1 (ko) | 2016-09-05 | 2017-08-29 | 스테이터 및 이를 포함하는 모터 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019527016A JP2019527016A (ja) | 2019-09-19 |
| JP2019527016A5 JP2019527016A5 (ja) | 2020-09-17 |
| JP6982612B2 true JP6982612B2 (ja) | 2021-12-17 |
Family
ID=61301054
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019511691A Active JP6982612B2 (ja) | 2016-09-05 | 2017-08-29 | ステーターおよびこれを含むモーター |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20190199147A1 (ja) |
| EP (1) | EP3509187B1 (ja) |
| JP (1) | JP6982612B2 (ja) |
| CN (1) | CN109643915B (ja) |
| WO (1) | WO2018044027A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11967871B2 (en) * | 2017-09-15 | 2024-04-23 | University Of Utah Research Foundation | Cogging-torque actuator |
| CA3024781A1 (en) * | 2017-11-21 | 2019-05-21 | Mcmaster University | Multi-teeth switched reluctance motor with short flux path |
| KR102633273B1 (ko) * | 2018-08-30 | 2024-02-05 | 엘지이노텍 주식회사 | 모터 |
| KR20200086087A (ko) * | 2019-01-08 | 2020-07-16 | 엘지이노텍 주식회사 | 모터 |
| KR20210012707A (ko) * | 2019-07-26 | 2021-02-03 | 엘지이노텍 주식회사 | 모터 |
| TWI723493B (zh) | 2019-08-14 | 2021-04-01 | 財團法人工業技術研究院 | 組合式馬達定子 |
| DE102019122271A1 (de) * | 2019-08-20 | 2021-02-25 | Schaeffler Technologies AG & Co. KG | Elektromotor mit einer Aussparung in einem radialen Polrandbereich |
| KR20210043079A (ko) * | 2019-10-11 | 2021-04-21 | 현대자동차주식회사 | 비대칭 회전자 코어를 갖는 모터 |
| EP3863152A1 (en) | 2020-02-07 | 2021-08-11 | Sicor S.p.A. | Stator for an electric motor or generator and motor or generator comprising such a stator |
| CN112366845A (zh) * | 2020-12-17 | 2021-02-12 | 哈尔滨理工大学 | 一种高效率背绕式绕组无齿槽永磁同步电机 |
| FR3128073B1 (fr) | 2021-10-12 | 2024-07-12 | Nidec Psa Emotors | Stator de machine électrique tournante |
| CN114614611B (zh) * | 2021-12-14 | 2023-09-08 | 苏州长风航空电子有限公司 | 角位移传感器敏感组件 |
| JP7310971B1 (ja) * | 2022-04-28 | 2023-07-19 | 株式会社明電舎 | ステータ及び回転機 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0709947B1 (en) * | 1994-10-28 | 1998-07-08 | Hewlett-Packard Company | Balancing of radial reluctance forces in a DC motor |
| JPH08308198A (ja) * | 1995-05-08 | 1996-11-22 | Nippon Seiko Kk | ブラシレスモータ |
| JPH1042531A (ja) * | 1996-05-24 | 1998-02-13 | Matsushita Electric Ind Co Ltd | 電動機 |
| WO2001057987A1 (en) * | 2000-02-01 | 2001-08-09 | Pacsci Motion Control, Inc. | Brushless dc motor having reduced cogging torque |
| JP3691345B2 (ja) * | 2000-05-25 | 2005-09-07 | 三菱電機株式会社 | 永久磁石型電動機 |
| JP2003018773A (ja) * | 2001-06-28 | 2003-01-17 | Sankyo Seiki Mfg Co Ltd | コア付きモータ |
| CN1579043B (zh) * | 2002-03-29 | 2010-05-05 | 松下电器产业株式会社 | 电动机 |
| JP4244299B2 (ja) * | 2003-03-12 | 2009-03-25 | 三菱電機株式会社 | 電動パワーステアリング装置用永久磁石型モータ |
| JP4566590B2 (ja) * | 2004-03-19 | 2010-10-20 | 三菱電機株式会社 | 永久磁石型モータ |
| WO2008050637A1 (fr) * | 2006-10-25 | 2008-05-02 | Mitsuba Corporation | Moteur sans balai |
| CN101330231A (zh) * | 2007-06-19 | 2008-12-24 | 上海海立(集团)股份有限公司 | 压缩机用永磁电机定转子 |
| JP2009189163A (ja) * | 2008-02-06 | 2009-08-20 | Nippon Densan Corp | モータ |
| US20090236920A1 (en) * | 2008-03-18 | 2009-09-24 | Delphi Technologies Inc. | Systems and methods involving opitmized motors |
| US20100156226A1 (en) * | 2008-12-19 | 2010-06-24 | Gm Global Technology Operations, Inc. | Brush type motor |
| JP2010172063A (ja) * | 2009-01-20 | 2010-08-05 | Mitsuba Corp | アウターロータ型ブラシレスモータ |
| ES2444770T3 (es) * | 2010-04-13 | 2014-02-26 | Ebm-Papst Mulfingen Gmbh & Co. Kg | Motor eléctrico |
| WO2011149245A2 (ko) * | 2010-05-24 | 2011-12-01 | 학교법인 두원학원 | 전동식압축기 전동기의 구조 |
| JP2012029515A (ja) * | 2010-07-27 | 2012-02-09 | Minebea Co Ltd | 単相ブラシレスモータ |
| JP5073805B2 (ja) * | 2010-11-22 | 2012-11-14 | 三菱電機株式会社 | 永久磁石型モータ及び永久磁石型リニアモータ |
| CN103683562B (zh) * | 2012-09-17 | 2016-08-31 | 美的集团股份有限公司 | 一种直流电机、变频压缩机及全直流变频空调室外机 |
| US10186916B2 (en) * | 2012-12-28 | 2019-01-22 | Top Co., Ltd | Rotary machine and electric vehicle |
| JP2015070663A (ja) * | 2013-09-27 | 2015-04-13 | アスモ株式会社 | モータ |
| CN103746473A (zh) * | 2014-01-13 | 2014-04-23 | 广东美芝精密制造有限公司 | 用于压缩机的电机及具有该电机的压缩机 |
| KR20150104240A (ko) * | 2014-03-04 | 2015-09-15 | 주식회사 시스웍 | 원격제어 비엘디씨 전동 그라인더 |
| CN103956838A (zh) * | 2014-05-21 | 2014-07-30 | 黄石东贝电器股份有限公司 | 一种用于无刷直流电机中降低基波齿槽转矩的定子 |
| US20160149444A1 (en) * | 2014-11-24 | 2016-05-26 | Hyundai Motor Company | Stator of interior permanent magnet synchronous motor |
| CN204465165U (zh) * | 2015-04-02 | 2015-07-08 | 台州宝达机电有限公司 | 永磁电机的定子冲片 |
| JP2018061392A (ja) * | 2016-10-07 | 2018-04-12 | 株式会社デンソー | 電機子および回転電機 |
-
2017
- 2017-08-29 EP EP17846952.4A patent/EP3509187B1/en active Active
- 2017-08-29 US US16/329,641 patent/US20190199147A1/en not_active Abandoned
- 2017-08-29 JP JP2019511691A patent/JP6982612B2/ja active Active
- 2017-08-29 CN CN201780053434.XA patent/CN109643915B/zh active Active
- 2017-08-29 WO PCT/KR2017/009410 patent/WO2018044027A1/ko active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| EP3509187A1 (en) | 2019-07-10 |
| WO2018044027A1 (ko) | 2018-03-08 |
| US20190199147A1 (en) | 2019-06-27 |
| EP3509187B1 (en) | 2021-12-15 |
| CN109643915A (zh) | 2019-04-16 |
| EP3509187A4 (en) | 2019-09-11 |
| JP2019527016A (ja) | 2019-09-19 |
| CN109643915B (zh) | 2021-09-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6982612B2 (ja) | ステーターおよびこれを含むモーター | |
| JP7131564B2 (ja) | ロータ、モータおよび電動パワーステアリング装置 | |
| JP2013099038A (ja) | 電動機用ロータおよびブラシレスモータ | |
| JP7544796B2 (ja) | モータ | |
| JP2013102597A (ja) | 電動機用ロータおよびブラシレスモータ | |
| JP2013126291A (ja) | ブラシレスモータおよび電動パワーステアリング装置 | |
| JP7060595B2 (ja) | カバー組立体、モータおよびこれを含む電動式操向装置 | |
| JP2021535720A (ja) | モータ | |
| JP2014107939A (ja) | ブラシレスモータ | |
| WO2018128165A1 (ja) | ロータおよび電動モータ | |
| JP2021535715A (ja) | モータ | |
| WO2019189313A1 (ja) | ロータ、モータおよび電動パワーステアリング装置 | |
| KR20180089173A (ko) | 모터 | |
| JP5667803B2 (ja) | 回転電機の回転子 | |
| KR20180027021A (ko) | 스테이터 및 이를 포함하는 모터 | |
| KR20190023243A (ko) | 스테이터 및 이를 포함하는 모터 | |
| JP2022516269A (ja) | モータ | |
| JP7284177B2 (ja) | ロータおよびこれを具備するモータ | |
| KR102600791B1 (ko) | 자속집중형 로터 및 이를 구비한 모터 | |
| CN113994567B (zh) | 电机 | |
| KR20190063361A (ko) | 모터 | |
| JP7131563B2 (ja) | ロータ、モータおよび電動パワーステアリング装置 | |
| KR20190128450A (ko) | 모터 | |
| KR20180068014A (ko) | 로터 및 이를 포함하는 모터 | |
| KR20180007089A (ko) | 로터 및 이를 포함하는 모터 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190306 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200804 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200804 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210721 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210727 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211014 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211102 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211119 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6982612 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |