JP6972900B2 - 磁気センサ - Google Patents
磁気センサ Download PDFInfo
- Publication number
- JP6972900B2 JP6972900B2 JP2017202267A JP2017202267A JP6972900B2 JP 6972900 B2 JP6972900 B2 JP 6972900B2 JP 2017202267 A JP2017202267 A JP 2017202267A JP 2017202267 A JP2017202267 A JP 2017202267A JP 6972900 B2 JP6972900 B2 JP 6972900B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- region
- material layer
- magnetic material
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

























Description
11 開口部
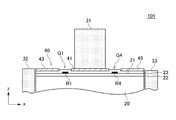
20 センサ基板
21 素子形成面
22〜26 絶縁層
31〜34 外部磁性体
35 磁性ブロック
36 凹部
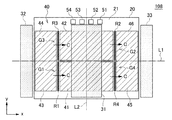
40 磁性体層
41 磁性体層の第1の領域
42 磁性体層の第2の領域
43 磁性体層の第3の領域
44 磁性体層の第4の領域
45 磁性体層の第5の領域
46 磁性体層の第6の領域
47 磁性体層の第7の領域
51〜54,61〜64 ボンディングパッド
71,73 切り欠き部
72,74 独立パターン
100〜120 磁気センサ
BW ボンディングワイヤ
G1〜G4 ギャップ
L1,L2 直線
R1〜R4 感磁素子
φ 磁束
Claims (18)
- センサ基板と、
センサ基板上に設けられた磁性体層と、
ブリッジ接続される第1乃至第4の感磁素子と、を備え、
前記磁性体層は、いずれも矩形である第1乃至第6の領域を有し、
前記第1の領域は、前記第3の領域と前記第5の領域に挟まれるよう設けられ、
前記第2の領域は、前記第4の領域と前記第6の領域に挟まれるよう設けられ、
前記第1の感磁素子は、前記第1の領域と前記第3の領域の間に位置する第1のギャップによって形成される磁路上に配置され、
前記第2の感磁素子は、前記第2の領域と前記第6の領域の間に位置する第2のギャップによって形成される磁路上に配置され、
前記第3の感磁素子は、前記第2の領域と前記第4の領域の間に位置する第3のギャップによって形成される磁路上に配置され、
前記第4の感磁素子は、前記第1の領域と前記第5の領域の間に位置する第4のギャップによって形成される磁路上に配置され、
前記第1の感磁素子は、前記磁性体層の前記第1及び第3の領域と重なりを有しており、
前記第2の感磁素子は、前記磁性体層の前記第2及び第6の領域と重なりを有しており、
前記第3の感磁素子は、前記磁性体層の前記第2及び第4の領域と重なりを有しており、
前記第4の感磁素子は、前記磁性体層の前記第1及び第5の領域と重なりを有していることを特徴とする磁気センサ。 - 前記磁性体層の前記第1及び第2の領域を覆うよう、前記センサ基板上に設けられた第1の外部磁性体をさらに備えることを特徴とする請求項1に記載の磁気センサ。
- 前記第1乃至第4のギャップの延在方向である第1の方向における前記第1の外部磁性体の幅は、前記磁性体層の前記第1及び第2の領域の前記第1の方向における合計幅よりも広く、これにより、前記第1及び第2の領域の前記第1の方向における全幅が前記第1の外部磁性体によって覆われていることを特徴とする請求項2に記載の磁気センサ。
- 前記磁性体層の前記第3及び第4の領域の近傍に設けられた第2の外部磁性体と、前記磁性体層の前記第5及び第6の領域の近傍に設けられた第3の外部磁性体とをさらに備えることを特徴とする請求項2又は3に記載の磁気センサ。
- 前記磁性体層の前記第1の領域と前記第2の領域は、一体的であり且つ全体として矩形であることを特徴とする請求項1乃至4のいずれか一項に記載の磁気センサ。
- 前記磁性体層の前記第3の領域と前記第4の領域は、一体的であり且つ全体として矩形であり、
前記磁性体層の前記第5の領域と前記第6の領域は、一体的であり且つ全体として矩形であることを特徴とする請求項1乃至5のいずれか一項に記載の磁気センサ。 - 前記磁性体層には、ループ状の外周を有する切り欠き部が設けられていることを特徴とする請求項1乃至6のいずれか一項に記載の磁気センサ。
- 前記第1、第2、第3及び第4の感磁素子は、それぞれ前記第1、第2、第3及び第4のギャップによって形成される磁路上に配置された複数の感磁素子が直列接続されてなることを特徴とする請求項1乃至7のいずれか一項に記載の磁気センサ。
- 前記磁性体層は、平面視で、前記第1、第2、第3及び第4の感磁素子をそれぞれ構成する前記複数の感磁素子間に配置された第7の領域をさらに有することを特徴とする請求項8に記載の磁気センサ。
- 前記磁性体層の前記第7の領域は、前記第1、第2、第3及び第4の感磁素子をそれぞれ構成する前記複数の感磁素子と重なりを有していることを特徴とする請求項9に記載の磁気センサ。
- 前記磁性体層の前記第7の領域は、前記第1乃至第4のギャップの延在方向である第1の方向に分割されていることを特徴とする請求項9又は10に記載の磁気センサ。
- 前記第1乃至第4の感磁素子は、いずれも磁気抵抗素子であることを特徴とする請求項1乃至11のいずれか一項に記載の磁気センサ。
- 前記第1乃至第4の感磁素子を構成する磁気抵抗素子の感度方向は互いに同一であることを特徴とする請求項12に記載の磁気センサ。
- 前記第1乃至第4の感磁素子を構成する磁気抵抗素子は、スピンバルブ型GMR素子であることを特徴とする請求項12又は13に記載の磁気センサ。
- センサ基板と、
センサ基板上に設けられた磁性体層と、
ブリッジ接続される第1乃至第4の感磁素子と、を備え、
前記磁性体層は、いずれも矩形である第1乃至第6の領域を有し、
前記第1の領域は、前記第3の領域と前記第5の領域に挟まれるよう設けられ、
前記第2の領域は、前記第4の領域と前記第6の領域に挟まれるよう設けられ、
前記第1の感磁素子は、前記第1の領域と前記第3の領域の間に位置する第1のギャップによって形成される磁路上に配置され、
前記第2の感磁素子は、前記第2の領域と前記第6の領域の間に位置する第2のギャップによって形成される磁路上に配置され、
前記第3の感磁素子は、前記第2の領域と前記第4の領域の間に位置する第3のギャップによって形成される磁路上に配置され、
前記第4の感磁素子は、前記第1の領域と前記第5の領域の間に位置する第4のギャップによって形成される磁路上に配置され、
前記磁性体層には、ループ状の外周を有する切り欠き部が設けられていることを特徴とする磁気センサ。 - センサ基板と、
センサ基板上に設けられた磁性体層と、
ブリッジ接続される第1乃至第4の感磁素子と、を備え、
前記磁性体層は、いずれも矩形である第1乃至第6の領域を有し、
前記第1の領域は、前記第3の領域と前記第5の領域に挟まれるよう設けられ、
前記第2の領域は、前記第4の領域と前記第6の領域に挟まれるよう設けられ、
前記第1の感磁素子は、前記第1の領域と前記第3の領域の間に位置する第1のギャップによって形成される磁路上に配置され、
前記第2の感磁素子は、前記第2の領域と前記第6の領域の間に位置する第2のギャップによって形成される磁路上に配置され、
前記第3の感磁素子は、前記第2の領域と前記第4の領域の間に位置する第3のギャップによって形成される磁路上に配置され、
前記第4の感磁素子は、前記第1の領域と前記第5の領域の間に位置する第4のギャップによって形成される磁路上に配置され、
前記第1、第2、第3及び第4の感磁素子は、それぞれ前記第1、第2、第3及び第4のギャップによって形成される磁路上に配置された複数の感磁素子が直列接続されてなり、
前記磁性体層は、平面視で、前記第1、第2、第3及び第4の感磁素子をそれぞれ構成する前記複数の感磁素子間に配置された第7の領域をさらに有することを特徴とする磁気センサ。 - 前記磁性体層の前記第7の領域は、前記第1、第2、第3及び第4の感磁素子をそれぞれ構成する前記複数の感磁素子と重なりを有していることを特徴とする請求項16に記載の磁気センサ。
- 前記磁性体層の前記第7の領域は、前記第1乃至第4のギャップの延在方向である第1の方向に分割されていることを特徴とする請求項16又は17に記載の磁気センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017202267A JP6972900B2 (ja) | 2017-10-19 | 2017-10-19 | 磁気センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017202267A JP6972900B2 (ja) | 2017-10-19 | 2017-10-19 | 磁気センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019074481A JP2019074481A (ja) | 2019-05-16 |
| JP6972900B2 true JP6972900B2 (ja) | 2021-11-24 |
Family
ID=66544048
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017202267A Active JP6972900B2 (ja) | 2017-10-19 | 2017-10-19 | 磁気センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6972900B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019139110A1 (ja) * | 2018-01-11 | 2021-01-28 | Tdk株式会社 | 磁気センサ |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7006670B2 (ja) * | 2019-10-24 | 2022-01-24 | Tdk株式会社 | 磁気センサ |
| JP7292234B2 (ja) | 2020-03-11 | 2023-06-16 | 株式会社東芝 | 磁気センサ及び診断装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008146809A1 (ja) * | 2007-05-28 | 2008-12-04 | Mitsubishi Electric Corporation | 磁界検出装置 |
| US7639005B2 (en) * | 2007-06-15 | 2009-12-29 | Advanced Microsensors, Inc. | Giant magnetoresistive resistor and sensor apparatus and method |
| EP2343566A4 (en) * | 2008-09-29 | 2014-04-16 | Omron Tateisi Electronics Co | MAGNETIC FIELD DETECTION ELEMENT AND SIGNAL TRANSMISSION ELEMENT |
| WO2016024621A1 (ja) * | 2014-08-13 | 2016-02-18 | 旭化成エレクトロニクス株式会社 | 磁気センサ |
| DE112016006539T5 (de) * | 2016-03-03 | 2018-11-15 | Tdk Corporation | Magnetsensor |
| JP2017167021A (ja) * | 2016-03-17 | 2017-09-21 | Tdk株式会社 | 磁気センサ |
-
2017
- 2017-10-19 JP JP2017202267A patent/JP6972900B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019139110A1 (ja) * | 2018-01-11 | 2021-01-28 | Tdk株式会社 | 磁気センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019074481A (ja) | 2019-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7014159B2 (ja) | 磁気センサ | |
| EP2682773B1 (en) | Separately packaged bridge magnetic-field angle sensor | |
| CN110709720B (zh) | 磁传感器 | |
| WO2017158900A1 (ja) | 磁気センサ | |
| JP6822127B2 (ja) | 磁気センサ | |
| JP7069960B2 (ja) | 磁気センサ | |
| JP6972900B2 (ja) | 磁気センサ | |
| JP2011047929A (ja) | 磁気センサ | |
| JP7020176B2 (ja) | 磁気センサ | |
| JP2009300150A (ja) | 磁気センサ及び磁気センサモジュール | |
| WO2019139110A1 (ja) | 磁気センサ | |
| CN109655767B (zh) | 一种集成磁结构 | |
| CN111693911B (zh) | 磁传感器装置 | |
| JP5413866B2 (ja) | 磁気検出素子を備えた電流センサ | |
| JP7077679B2 (ja) | 磁気センサ | |
| JP7119351B2 (ja) | 磁気センサ | |
| JP7070020B2 (ja) | 磁路形成部材及びこれを用いた磁気センサ | |
| JP2018096840A (ja) | センサユニット | |
| KR20230089608A (ko) | 3축 자기저항 센서 | |
| JP2021101168A (ja) | 磁気センサ | |
| CN116609712A (zh) | 磁传感器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200519 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210324 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210406 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210521 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211005 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211018 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6972900 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |