JP6958366B2 - 画像配信装置、画像配信方法および画像配信プログラム - Google Patents
画像配信装置、画像配信方法および画像配信プログラム Download PDFInfo
- Publication number
- JP6958366B2 JP6958366B2 JP2018001786A JP2018001786A JP6958366B2 JP 6958366 B2 JP6958366 B2 JP 6958366B2 JP 2018001786 A JP2018001786 A JP 2018001786A JP 2018001786 A JP2018001786 A JP 2018001786A JP 6958366 B2 JP6958366 B2 JP 6958366B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- image
- unit
- image distribution
- photographed image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0141—Measuring and analyzing of parameters relative to traffic conditions for specific applications for traffic information dissemination
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096733—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place
- G08G1/09675—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place where a selection from the received information takes place in the vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096791—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is another vehicle
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00095—Systems or arrangements for the transmission of the picture signal
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/021—Services related to particular areas, e.g. point of interest [POI] services, venue services or geofences
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/44—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for communication between vehicles and infrastructures, e.g. vehicle-to-cloud [V2C] or vehicle-to-home [V2H]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/46—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for vehicle-to-vehicle communication [V2V]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/04—Detecting movement of traffic to be counted or controlled using optical or ultrasonic detectors
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Atmospheric Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Traffic Control Systems (AREA)
- Closed-Circuit Television Systems (AREA)
Description
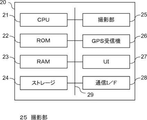
20 車載器
25 撮影部
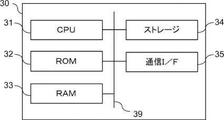
30 画像配信装置
301 受信部
302 特定部
303 送信部
304 決定部
305 通報部
Claims (6)
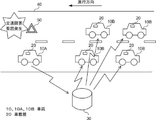
- 第1の車両において撮影された撮影画像、および前記撮影画像が撮影された位置に関する位置情報を受信する受信部と、
前記受信部により受信された前記位置情報に示される位置に向かう、前記第1の車両と異なる第2の車両を特定する特定部と、
前記特定部により特定された前記第2の車両に、前記受信部により受信された前記撮影画像を送信する送信部と、
前記撮影画像に表れる交通を阻害する要因に応じて、通報先を決定する決定部と、
前記決定部により決定された通報先に、通報する通報部と、
を有する画像配信装置。 - 前記特定部が特定する第2の車両は、所定の走行速度以下の車両である請求項1に記載の画像配信装置。
- 前記第2の車両は、前記位置情報に示される車線と対向する対向車線を走行する車両を含む請求項1または請求項2に記載の画像配信装置。
- 前記送信部は、前記交通を阻害する要因の重要度に応じて、前記特定部により特定された前記第2の車両のうち、前記撮影画像を送信する対象を変更する請求項1〜3の何れか1項に記載の画像配信装置。
- 第1の車両において撮影された撮影画像、および前記撮影画像が撮影された位置に関する位置情報を受信する工程と、
前記位置情報に示される位置に向かう第2の車両を特定する工程と、
特定された前記第2の車両に、前記撮影画像を送信する工程と、
前記撮影画像に表れる交通を阻害する要因に応じて、通報先を決定する工程と、
決定された前記通報先に、通報する工程と、
を有する画像配信方法。 - 第1の車両において撮影された撮影画像、および前記撮影画像が撮影された位置に関する位置情報を受信するステップと、
前記位置情報に示される位置に向かう第2の車両を特定するステップと、
特定された前記第2の車両に、前記撮影画像を送信するステップと、
前記撮影画像に表れる交通を阻害する要因に応じて、通報先を決定するステップと、
決定された前記通報先に、通報するステップと、
をコンピュータに実行させる画像配信プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018001786A JP6958366B2 (ja) | 2018-01-10 | 2018-01-10 | 画像配信装置、画像配信方法および画像配信プログラム |
| CN201811616262.5A CN110021162A (zh) | 2018-01-10 | 2018-12-28 | 图像配送装置、图像配送方法以及记录介质 |
| US16/241,213 US20190213876A1 (en) | 2018-01-10 | 2019-01-07 | Image distribution device, image distribution method, and storage medium storing image distribution program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018001786A JP6958366B2 (ja) | 2018-01-10 | 2018-01-10 | 画像配信装置、画像配信方法および画像配信プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019121264A JP2019121264A (ja) | 2019-07-22 |
| JP6958366B2 true JP6958366B2 (ja) | 2021-11-02 |
Family
ID=67140155
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018001786A Active JP6958366B2 (ja) | 2018-01-10 | 2018-01-10 | 画像配信装置、画像配信方法および画像配信プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20190213876A1 (ja) |
| JP (1) | JP6958366B2 (ja) |
| CN (1) | CN110021162A (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11438741B2 (en) * | 2020-01-27 | 2022-09-06 | Honda Motor Co., Ltd. | Coordinated transportation system and methods thereof |
| CN113112801A (zh) * | 2021-04-12 | 2021-07-13 | 智道网联科技(北京)有限公司 | 基于智慧交通的交通事件处理方法和装置 |
| JP7491277B2 (ja) * | 2021-08-26 | 2024-05-28 | トヨタ自動車株式会社 | 自動車 |
| KR20230045391A (ko) * | 2021-09-28 | 2023-04-04 | 현대자동차주식회사 | 교통 흐름 방해 타겟 검출 장치 및 그 방법 |
| JP7732846B2 (ja) * | 2021-10-20 | 2025-09-02 | 矢崎総業株式会社 | 移動支援装置、移動支援方法、移動支援プログラム及び移動支援システム |
| WO2026079233A1 (ja) * | 2024-10-10 | 2026-04-16 | 日本電気株式会社 | 情報処理システム、情報処理方法及びプログラム |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7818123B2 (en) * | 2004-03-31 | 2010-10-19 | Pioneer Corporation | Routing guide system and method |
| JP2008293208A (ja) * | 2007-05-23 | 2008-12-04 | Fuji Heavy Ind Ltd | 車両の緊急通報装置 |
| US9024785B2 (en) * | 2011-12-27 | 2015-05-05 | Aisin Aw Co., Ltd. | Traffic information distribution system and traffic information system, traffic information distribution program, and traffic information distribution method |
| CN102663894B (zh) * | 2012-05-20 | 2014-01-01 | 杭州妙影微电子有限公司 | 一种基于物联网的道路交通状况预知系统及预知方法 |
| JP5888164B2 (ja) * | 2012-07-20 | 2016-03-16 | トヨタ自動車株式会社 | 車両周辺監視装置、車両周辺監視システム |
| JP6337646B2 (ja) * | 2014-06-26 | 2018-06-06 | 株式会社Jvcケンウッド | 車載映像システム、映像転送システム、映像転送方法及び映像転送プログラム |
| CN104200688A (zh) * | 2014-09-19 | 2014-12-10 | 杜东平 | 一种双向广播式车辆间通信系统及方法 |
| JP2016173764A (ja) * | 2015-03-17 | 2016-09-29 | パイオニア株式会社 | 撮影装置、撮影システム、撮影方法および撮影プログラム |
| JP6546028B2 (ja) * | 2015-07-29 | 2019-07-17 | 株式会社デンソーテン | サーバ、送信システム、送信方法、及び、プログラム |
| US9786171B2 (en) * | 2016-01-26 | 2017-10-10 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for detecting and distributing hazard data by a vehicle |
| CN105632204A (zh) * | 2016-01-29 | 2016-06-01 | 乌鲁木齐睿德国通电子科技有限公司 | 公路智能控制平台及其应用方法 |
| CN105679099B (zh) * | 2016-04-05 | 2018-11-20 | 合肥驾预科技有限公司 | 一种碰撞预警装置 |
| CN107195199A (zh) * | 2017-07-11 | 2017-09-22 | 珠海利安达智能科技有限公司 | 道路安全预警系统及方法 |
-
2018
- 2018-01-10 JP JP2018001786A patent/JP6958366B2/ja active Active
- 2018-12-28 CN CN201811616262.5A patent/CN110021162A/zh active Pending
-
2019
- 2019-01-07 US US16/241,213 patent/US20190213876A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019121264A (ja) | 2019-07-22 |
| CN110021162A (zh) | 2019-07-16 |
| US20190213876A1 (en) | 2019-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6958366B2 (ja) | 画像配信装置、画像配信方法および画像配信プログラム | |
| US12300114B2 (en) | Broadcasting telematics data to nearby mobile devices, vehicles, and infrastructure | |
| WO2017145650A1 (ja) | 車載機及び道路異常警告システム | |
| US10134285B1 (en) | FleetCam integration | |
| JP7215368B2 (ja) | 走行制御装置、走行システムおよび走行プログラム | |
| JP2024117622A (ja) | 情報処理装置及び情報処理プログラム | |
| CN121438618A (zh) | 用于获取信息的方法、用于采集信息的方法和相关装置 | |
| JP2024151581A (ja) | 情報処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200728 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210623 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210706 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210803 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210907 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210920 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6958366 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |