JP6936070B2 - 周辺監視装置 - Google Patents
周辺監視装置 Download PDFInfo
- Publication number
- JP6936070B2 JP6936070B2 JP2017149307A JP2017149307A JP6936070B2 JP 6936070 B2 JP6936070 B2 JP 6936070B2 JP 2017149307 A JP2017149307 A JP 2017149307A JP 2017149307 A JP2017149307 A JP 2017149307A JP 6936070 B2 JP6936070 B2 JP 6936070B2
- Authority
- JP
- Japan
- Prior art keywords
- region
- state
- threshold
- monitoring device
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/183—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a single remote source
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
- G06V10/443—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components by matching or filtering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0055—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots with safety arrangements
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/73—Deblurring; Sharpening
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Automation & Control Theory (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Signal Processing (AREA)
- Traffic Control Systems (AREA)
- Studio Devices (AREA)
- Closed-Circuit Television Systems (AREA)
- Business, Economics & Management (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
Description
自車両の外部に露出した保護窓(22)を通して当該自車両の周辺領域を撮影するカメラ(21)により撮影された画像であるカメラ画像に基づいて前記自車両の運転を支援するための支援制御を実施する制御部(10)と、
前記カメラ画像に含まれる画素のエッジ強度(ES)に基づいて前記保護窓の状態が前記保護窓の全面に汚れが付着している状態である全面汚れ状態であるか否かを判定し(ステップ740)、前記保護窓の状態が前記全面汚れ状態であると判定されている場合に前記エッジ強度に基づいて前記全面汚れ状態が解除されたか否かを判定する(ステップ940及びステップ975)判定部(10)と、
を備える。
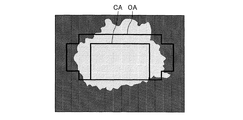
前記カメラ画像の中央部を含む第1領域(中央領域CA)に属する画素のそれぞれの前記エッジ強度に基づいて算出される第1領域指標値(中央エッジ領域数CEN)が所定の汚れ閾値(閾値領域数CEN1th)よりも小さい場合(ステップ740「Yes」)、前記保護窓の状態が前記全面汚れ状態であると判定し(ステップ745)、且つ、
前記第1領域指標値が第1解除閾値以上(閾値領域数CEN1th)であるとの第1条件が成立した場合(ステップ940「No」)、前記全面汚れ状態が解除されたと判定し(ステップ945)、
前記第1条件が成立しない場合であっても、前記カメラ画像の前記第1領域以外の部分を含む第2領域(外側領域OA)に属する画素のそれぞれの前記エッジ強度に基づいて算出される第2領域指標値(外側エッジ領域数OEN)が第2解除閾値(閾値領域数OEN1th)以上であるとの第2条件が成立した場合(ステップ975「No」)、前記全面汚れ状態が解除されたと判定する(ステップ945)、
ように構成されている。
前記判定部は、
前記第1領域に属し且つ前記エッジ強度が第1閾値強度(ES1th)以上である画素、の数と相関を有する値(CEN)を前記第1領域指標値として算出し(ステップ935)、
前記第2領域に属し且つ前記エッジ強度が第2閾値強度(ES1th)以上である画素、の数と相関を有する値(OEN)を前記第2領域指標値として算出する(ステップ970)、
ように構成されている。
前記判定部は、
前記第1領域を複数の個別領域(AR)に分割し、前記第1領域の前記複数の個別領域のそれぞれに属し且つ前記エッジ強度が前記第1閾値強度以上である画素、の数(エッジ画素数EN)が第1閾値画素数(EN1th)以上の前記個別領域の数である第1エッジ領域数(CEN)を前記第1領域指標値として算出し(ステップ735)、前記第1エッジ領域数が前記汚れ閾値としての第1閾値領域数(CEN1th)よりも小さい場合(ステップ740「Yes」)、前記保護窓の状態が前記全面汚れ状態であると判定する(ステップ745)ように構成されている。
前記判定部は、
前記第2領域を複数の個別領域(AR)に分割し、前記第2領域の前記複数の個別領域のそれぞれに属し且つ前記エッジ強度が前記第2閾値強度以上である画素、の数(エッジ画素数EN)が第2閾値画素数(EN1th)以上の前記個別領域の数である第2エッジ領域数(OEN)を前記第2領域指標値として算出し(ステップ970)、前記第2エッジ領域数が前記第2解除閾値としての第2閾値領域数(OEN1th)以上である場合(ステップ975「No」)、前記第2条件が成立したと判定するように構成されている。
前記判定部は、
前記第1領域及び前記第2領域のそれぞれを複数の個別領域(AR)に分割し、前記画素のうち所定時間における画素値の変化量が変化量判定値以下である画素の数(UCPN)が閾値画素数(UCPN1th)以上となる前記個別領域である無変化領域(UCA)が前記カメラ画像に含まれている場合(ステップ850「Yes」)、前記保護窓の状態が前記保護窓の前記無変化領域に対応する部分に汚れが付着している状態である部分汚れ状態であると判定する(ステップ855)ように構成され、
前記制御部は、
前記保護窓の状態が前記部分汚れ状態であると判定されている場合(ステップ630「No」)、前記支援制御を実施しないように構成されている。
前記判定部は、
前記保護窓の状態が前記部分汚れ状態であると判定されている場合(ステップ950「Yes」)、前記無変化領域に属し且つ前記エッジ強度が第3閾値強度以上である画素、の数(EN)が第3閾値画素数(EN1th)以上となったとき(ステップ960「Yes」)、前記無変化領域に対する前記部分汚れ状態が解除されたと判定する(ステップ965)ように構成されている。
前記判定部は、前記自車両の始動時に前記保護窓の状態が前記全面汚れ状態であると判定するように構成されている。
次に、本監視装置の作動の概要について説明する。前述したように、本監視装置は、カメラ21によって撮影されたカメラ画像及びクリアランスソナー24の検出結果に基づいて、自車両SVの後方側に存在する物標を認識し、認識した物標の中から自車両SVと衝突する可能性がある障害物を抽出する。更に、本監視装置は、抽出された障害物が自車両SVと衝突するまでに(又は自車両SVに最接近するまでに)かかる時間を示す衝突所要時間TTC(Time To Collision)を算出する。なお、障害物の抽出処理及び衝突所要時間TTCの算出処理の詳細は後述する。
条件(1)中央エッジ領域数CENが閾値領域数CEN1th以上である。
条件(2)外側領域OAにおける強エッジ領域の数(以下、「外側エッジ領域数」と称呼し、「第2エッジ領域数」又は「第2領域指標値」と称呼する場合もある。)OENが「第2解除閾値である閾値領域数OEN1th」以上である。
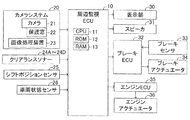
周辺監視ECU10のCPU11は、図6にフローチャートで示したルーチンを所定時間が経過する毎に実行する。図6に示すルーチンは、自車両SVが後退するときに自車両SVの後方側の障害物に対して、支援制御の一つである衝突前制御(後退時衝突前制御)を実施するためのルーチンである。
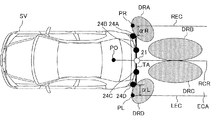
CPU11は、ステップ615にて取得した車両状態情報に含まれる「自車両SVの車速Vs及びヨーレートYr」に基づいて、自車両SVの旋回半径を算出する。そして、CPU11は、算出した旋回半径に基づいて、自車両SVの左右の後輪の車軸上の中心点PO(図2を参照。)が向かっている走行進路を走行予測進路RCRとして推定する。ヨーレートYrが発生している場合、CPU11は、円弧状の進路を走行予測進路RCRとして推定する。一方、ヨーレートYrが「0」の場合、CPU11は、自車両SVに作用する加速度の方向に沿った直線進路を走行予測進路RCRとして推定する。
CPU11は、自車両SVの車体の左端部から一定距離αLだけ更に左側に位置する点PLが通過する左側走行予測進路LECと、自車両SVの車体の右端部から一定距離αRだけ更に右側に位置する点PRが通過する右側走行予測進路RECと、を「有限の長さの走行予測進路RCR」に基づいて推定する。左側走行予測進路LECは、走行予測進路RCRを自車両SVの左右方向の左側に「距離αLに車幅の半分を加えた値」だけ平行移動した進路である。右側走行予測進路RECは、走行予測進路RCRを自車両SVの左右方向の右側に「距離αRに車幅の半分を加えた値」だけ平行移動した進路である。距離αL及び距離αRは何れも「0」以上の値であり、互いに相違していても同じであってもよい。更に、CPU11は、左側走行予測進路LECと右側走行予測進路RECとの間の領域を走行予測進路領域ECAとして特定する。
CPU11は、自車両SVと障害物との間の距離(相対距離)を障害物の自車両SVに対する相対速度で除することによって、障害物の衝突所要時間TTCを算出する。
・障害物が自車両SVと衝突すると予測される時点までの時間T1(現時点から衝突予測時点までの時間)
・自車両SVの側方を通り抜ける可能性のある障害物が自車両SVに最接近する時点までの時間T2(現時点から最接近予測時点までの時間)
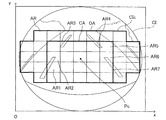
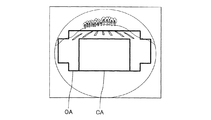
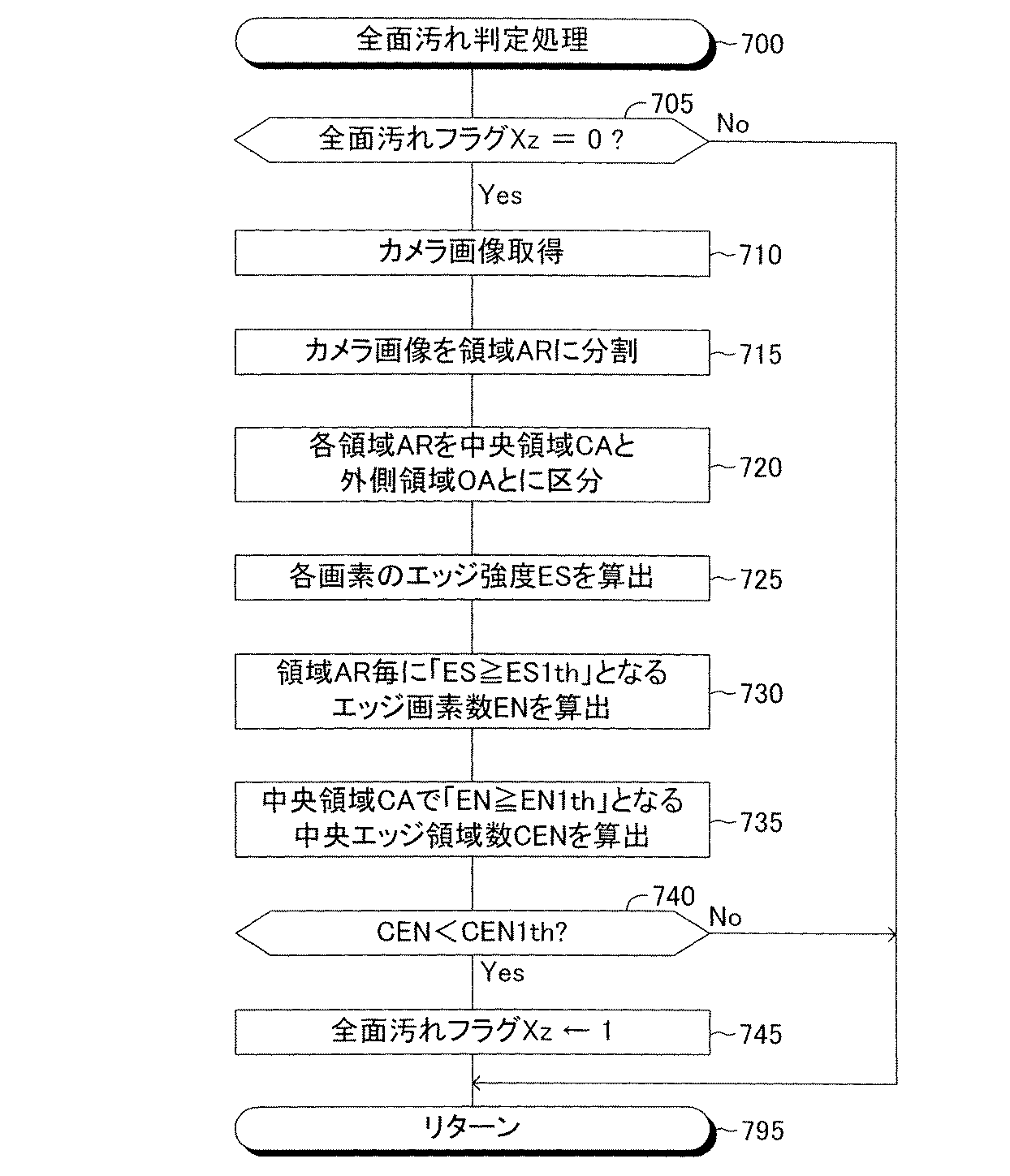
ステップ715:CPU11は、カメラ画像情報に含まれるカメラ画像を複数の個別領域AR(図3を参照。)に分割する。
ステップ720:CPU11は、複数の個別領域ARを、中央領域CA(図3を参照。)と外側領域OA(図3を参照。)とに区分する。
ステップ730:CPU11は、中央領域CAに属する複数の個別領域ARのそれぞれにおいて、エッジ強度ESが閾値強度ES1th以上であるエッジ画素数ENを算出する。
ステップ735:CPU11は、エッジ画素数ENが閾値画素数EN1th以上である個別領域ARの数(即ち、中央エッジ領域数CEN)を算出する。
ステップ865:CPU11は、積算回数カウンタACの値を「0」に設定することにより積算回数カウンタACを初期化する。
ステップ910:CPU11は、図7のステップ715と同じくカメラ画像を複数の個別領域ARに分割する。
ステップ915:CPU11は、図7のステップ720と同じく複数の個別領域ARを中央領域CAと外側領域OAとに区分する。
ステップ920:CPU11は、前述した式1乃至式3に従って、複数の個別領域ARに属する各画素のエッジ強度ESを算出する。
ステップ925:CPU11は、複数の個別領域ARのそれぞれにおいて、エッジ強度ESが閾値強度ES1th以上であるエッジ画素数ENを算出する。
Claims (7)
- 自車両の外部に露出した保護窓を通して当該自車両の周辺領域を撮影するカメラにより撮影された画像であるカメラ画像に基づいて前記自車両の運転を支援するための支援制御を実施する制御部と、
前記カメラ画像に含まれる画素のエッジ強度に基づいて前記保護窓の状態が前記保護窓の全面に汚れが付着している状態である全面汚れ状態であるか否かを判定し、前記保護窓の状態が前記全面汚れ状態であると判定されている場合に前記エッジ強度に基づいて前記全面汚れ状態が解除されたか否かを判定する判定部と、
を備えた周辺監視装置において、
前記制御部は、
前記保護窓の状態が前記全面汚れ状態であると判定されている場合、前記支援制御を実施しないように構成され、
前記判定部は、
前記カメラ画像の中央部を含む第1領域に属する画素のそれぞれの前記エッジ強度に基づいて算出される第1領域指標値が所定の汚れ閾値よりも小さい場合、前記保護窓の状態が前記全面汚れ状態であると判定し、且つ、
前記第1領域指標値が第1解除閾値以上であるとの第1条件が成立した場合、前記全面汚れ状態が解除されたと判定し、
前記第1条件が成立しない場合であっても、前記カメラ画像の前記第1領域以外の部分を含む第2領域に属する画素のそれぞれの前記エッジ強度に基づいて算出される第2領域指標値が第2解除閾値以上であるとの第2条件が成立した場合、前記全面汚れ状態が解除されたと判定する、
ように構成された、
周辺監視装置。 - 請求項1に記載の周辺監視装置において、
前記判定部は、
前記第1領域に属し且つ前記エッジ強度が第1閾値強度以上である画素、の数と相関を有する値を前記第1領域指標値として算出し、
前記第2領域に属し且つ前記エッジ強度が第2閾値強度以上である画素、の数と相関を有する値を前記第2領域指標値として算出する、
ように構成された、
周辺監視装置。 - 請求項2に記載の周辺監視装置において、
前記判定部は、
前記第1領域を複数の個別領域に分割し、前記第1領域の前記複数の個別領域のそれぞれに属し且つ前記エッジ強度が前記第1閾値強度以上である画素、の数が第1閾値画素数以上の前記個別領域の数である第1エッジ領域数を前記第1領域指標値として算出し、前記第1エッジ領域数が前記汚れ閾値としての第1閾値領域数よりも小さい場合、前記保護窓の状態が前記全面汚れ状態であると判定するように構成された、
周辺監視装置。 - 請求項2に記載の周辺監視装置において、
前記判定部は、
前記第2領域を複数の個別領域に分割し、前記第2領域の前記複数の個別領域のそれぞれに属し且つ前記エッジ強度が前記第2閾値強度以上である画素、の数が第2閾値画素数以上の前記個別領域の数である第2エッジ領域数を前記第2領域指標値として算出し、前記第2エッジ領域数が前記第2解除閾値としての第2閾値領域数以上である場合、前記第2条件が成立したと判定するように構成された、
周辺監視装置。 - 請求項1に記載の周辺監視装置であって、
前記判定部は、
前記第1領域及び前記第2領域のそれぞれを複数の個別領域に分割し、前記画素のうち所定時間における画素値の変化量が変化量判定値以下である画素の数が閾値画素数以上となる前記個別領域である無変化領域が前記カメラ画像に含まれている場合、前記保護窓の状態が前記保護窓の前記無変化領域に対応する部分に汚れが付着している状態である部分汚れ状態であると判定するように構成され、
前記制御部は、
前記保護窓の状態が前記部分汚れ状態であると判定されている場合、前記支援制御を実施しないように構成された、
周辺監視装置。 - 請求項5に記載の周辺監視装置において、
前記判定部は、
前記保護窓の状態が前記部分汚れ状態であると判定されている場合、前記無変化領域に属し且つ前記エッジ強度が第3閾値強度以上である画素、の数が第3閾値画素数以上となったとき、前記無変化領域に対する前記部分汚れ状態が解除されたと判定するように構成された、
周辺監視装置。 - 請求項1に記載の周辺監視装置において、
前記判定部は、前記自車両の始動時に前記保護窓の状態が前記全面汚れ状態であると判定するように構成された、
周辺監視装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017149307A JP6936070B2 (ja) | 2017-08-01 | 2017-08-01 | 周辺監視装置 |
| CN201810845388.3A CN109327677B (zh) | 2017-08-01 | 2018-07-27 | 周围监视装置 |
| US16/049,909 US11194324B2 (en) | 2017-08-01 | 2018-07-31 | Monitor device |
| DE102018118463.8A DE102018118463A1 (de) | 2017-08-01 | 2018-07-31 | Überwachungseinrichtung |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017149307A JP6936070B2 (ja) | 2017-08-01 | 2017-08-01 | 周辺監視装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019029901A JP2019029901A (ja) | 2019-02-21 |
| JP6936070B2 true JP6936070B2 (ja) | 2021-09-15 |
Family
ID=65019956
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017149307A Active JP6936070B2 (ja) | 2017-08-01 | 2017-08-01 | 周辺監視装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11194324B2 (ja) |
| JP (1) | JP6936070B2 (ja) |
| CN (1) | CN109327677B (ja) |
| DE (1) | DE102018118463A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6772113B2 (ja) * | 2017-08-02 | 2020-10-21 | クラリオン株式会社 | 付着物検出装置、および、それを備えた車両システム |
| JP7230507B2 (ja) * | 2018-12-28 | 2023-03-01 | 株式会社デンソーテン | 付着物検出装置 |
| US11089205B2 (en) * | 2019-08-16 | 2021-08-10 | Toyota Motor Engineering & Manufacturing North America, Inc. | Window position monitoring system |
| JP7172932B2 (ja) * | 2019-09-20 | 2022-11-16 | 株式会社デンソーテン | 付着物検出装置および付着物検出方法 |
| JP7172931B2 (ja) * | 2019-09-20 | 2022-11-16 | 株式会社デンソーテン | 付着物検出装置および付着物検出方法 |
| JP7188336B2 (ja) * | 2019-09-20 | 2022-12-13 | 株式会社デンソーテン | 付着物検出装置、および付着物検出方法 |
| CN114502984B (zh) * | 2019-10-04 | 2025-06-06 | 株式会社电装 | 测距装置、以及检测测距装置的窗口的污垢的方法 |
| JP7283461B2 (ja) * | 2020-11-19 | 2023-05-30 | トヨタ自動車株式会社 | 車両制御装置 |
| JP7447783B2 (ja) * | 2020-12-24 | 2024-03-12 | トヨタ自動車株式会社 | 車両制御システム及び車両走行制御装置 |
| JP7410848B2 (ja) * | 2020-12-28 | 2024-01-10 | 本田技研工業株式会社 | 車両用認識システムおよび認識方法 |
| US12319246B2 (en) * | 2021-08-25 | 2025-06-03 | Ford Global Technologies, Llc | Systems and methods for vehicle camera obstruction detection |
| JP7693523B2 (ja) * | 2021-11-25 | 2025-06-17 | 株式会社小野測器 | 計測システム |
| JP7582253B2 (ja) | 2022-05-20 | 2024-11-13 | トヨタ自動車株式会社 | 電子インナミラー装置及びその通知制御方法及び通知制御プログラム |
| US20250360938A1 (en) * | 2022-06-13 | 2025-11-27 | Honda Motor Co., Ltd. | Information processing device, information processing method, and program |
| EP4650229A1 (en) * | 2023-01-11 | 2025-11-19 | Astemo, Ltd. | Image processing device and image processing method |
| US12596077B2 (en) * | 2023-09-29 | 2026-04-07 | Apple Inc. | Passive camera lens smudge detection |
| WO2025158603A1 (ja) * | 2024-01-25 | 2025-07-31 | Astemo株式会社 | 画像処理装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010041120A (ja) * | 2008-07-31 | 2010-02-18 | Olympus Corp | 撮像装置及びこの撮像装置に適用されるレンズカバー |
| CN201427565Y (zh) * | 2009-07-14 | 2010-03-24 | 虞积勇 | 车用刮雨器 |
| JP2012191465A (ja) * | 2011-03-11 | 2012-10-04 | Sony Corp | 画像処理装置、および画像処理方法、並びにプログラム |
| US9319637B2 (en) * | 2012-03-27 | 2016-04-19 | Magna Electronics Inc. | Vehicle vision system with lens pollution detection |
| JP6055224B2 (ja) * | 2012-07-27 | 2016-12-27 | クラリオン株式会社 | レンズ洗浄装置 |
| US9445057B2 (en) * | 2013-02-20 | 2016-09-13 | Magna Electronics Inc. | Vehicle vision system with dirt detection |
| JP6245875B2 (ja) * | 2013-07-26 | 2017-12-13 | クラリオン株式会社 | レンズ汚れ検出装置およびレンズ汚れ検出方法 |
| JP6174975B2 (ja) * | 2013-11-14 | 2017-08-02 | クラリオン株式会社 | 周囲環境認識装置 |
| JP6048384B2 (ja) * | 2013-12-11 | 2016-12-21 | トヨタ自動車株式会社 | 画像判定装置 |
| CN203739844U (zh) * | 2014-01-22 | 2014-07-30 | 成都华川电装有限责任公司 | 后风挡洗涤器喷淋装置 |
| CN106415598B (zh) * | 2014-05-27 | 2020-08-28 | 罗伯特·博世有限公司 | 用于车载式相机系统的镜头污染的检测、识别和缓解 |
| KR102351508B1 (ko) * | 2015-04-28 | 2022-01-14 | 삼성디스플레이 주식회사 | 액정 표시 장치 |
| KR101714185B1 (ko) * | 2015-08-05 | 2017-03-22 | 엘지전자 주식회사 | 차량 운전 보조장치 및 이를 포함하는 차량 |
-
2017
- 2017-08-01 JP JP2017149307A patent/JP6936070B2/ja active Active
-
2018
- 2018-07-27 CN CN201810845388.3A patent/CN109327677B/zh active Active
- 2018-07-31 DE DE102018118463.8A patent/DE102018118463A1/de active Pending
- 2018-07-31 US US16/049,909 patent/US11194324B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US11194324B2 (en) | 2021-12-07 |
| CN109327677A (zh) | 2019-02-12 |
| JP2019029901A (ja) | 2019-02-21 |
| CN109327677B (zh) | 2021-07-09 |
| DE102018118463A1 (de) | 2019-02-07 |
| US20190041849A1 (en) | 2019-02-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6936070B2 (ja) | 周辺監視装置 | |
| JP6597590B2 (ja) | 運転支援装置 | |
| CN105416283B (zh) | 停车辅助装置 | |
| CN103241240B (zh) | 用于在汽车中保护外后视镜与侧面障碍物碰撞的装置 | |
| CN104136282B (zh) | 行驶控制装置以及行驶控制方法 | |
| EP2189811A1 (en) | Determination and signalling to a driver of a motor vehicle of a potential collision of the motor vehicle with an obstacle | |
| JP6849575B2 (ja) | 車両における制動支援装置および制動支援制御方法 | |
| JPWO2017068701A1 (ja) | 駐車スペース検出方法および装置 | |
| JP2001199260A (ja) | 車間距離制御装置、車両走行状況表示装置、車速制御解除装置、及び車両急制動警告装置 | |
| CN103359112A (zh) | 车辆的驾驶辅助装置 | |
| CN106573589A (zh) | 碰撞预测时间计算装置以及碰撞预测时间计算方法 | |
| JP7200572B2 (ja) | 付着物検出装置 | |
| JP6970547B2 (ja) | 車両制御装置及び車両制御方法 | |
| WO2018190037A1 (ja) | 障害物検知報知装置、方法及びプログラム | |
| JP6462492B2 (ja) | 車両の運転支援装置、及び運転支援方法 | |
| JP2019002689A (ja) | 物標検出装置 | |
| CN104136281A (zh) | 行驶控制装置以及行驶控制方法 | |
| US12344238B2 (en) | Driving assistance method and driving assistance device | |
| JP7380449B2 (ja) | 判定装置及びプログラム | |
| US20220266830A1 (en) | Driving assist method and driving assist device | |
| JP7786931B2 (ja) | 車両制御装置 | |
| JP4661602B2 (ja) | 後方車両解析装置及び衝突予測装置 | |
| JP2024024349A (ja) | 車両制御装置 | |
| JP7279390B2 (ja) | 電子制御装置 | |
| JP2023073089A (ja) | 駐車支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200521 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210318 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210413 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210527 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210803 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210826 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6936070 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |