JP6897502B2 - 超音波センサ - Google Patents
超音波センサ Download PDFInfo
- Publication number
- JP6897502B2 JP6897502B2 JP2017212694A JP2017212694A JP6897502B2 JP 6897502 B2 JP6897502 B2 JP 6897502B2 JP 2017212694 A JP2017212694 A JP 2017212694A JP 2017212694 A JP2017212694 A JP 2017212694A JP 6897502 B2 JP6897502 B2 JP 6897502B2
- Authority
- JP
- Japan
- Prior art keywords
- axial direction
- holding member
- elastic holding
- receiver
- case
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000002093 peripheral effect Effects 0.000 claims description 26
- 230000005489 elastic deformation Effects 0.000 claims description 12
- 229920003002 synthetic resin Polymers 0.000 claims description 8
- 239000000057 synthetic resin Substances 0.000 claims description 8
- 239000000945 filler Substances 0.000 claims description 6
- 238000012986 modification Methods 0.000 description 8
- 230000004048 modification Effects 0.000 description 8
- 230000000149 penetrating effect Effects 0.000 description 8
- 238000004519 manufacturing process Methods 0.000 description 7
- 238000003780 insertion Methods 0.000 description 5
- 230000037431 insertion Effects 0.000 description 5
- 239000000463 material Substances 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 3
- 239000013013 elastic material Substances 0.000 description 3
- 229920002379 silicone rubber Polymers 0.000 description 3
- 239000004945 silicone rubber Substances 0.000 description 3
- 239000011248 coating agent Substances 0.000 description 2
- 238000000576 coating method Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000010030 laminating Methods 0.000 description 2
- 239000004743 Polypropylene Substances 0.000 description 1
- 230000004308 accommodation Effects 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- -1 polypropylene Polymers 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 239000003190 viscoelastic substance Substances 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/02—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems using reflection of acoustic waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/521—Constructional features
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2015/937—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles sensor installation details
- G01S2015/938—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles sensor installation details in the bumper area
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Transducers For Ultrasonic Waves (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Description
すなわち、この超音波センサは、
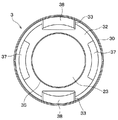
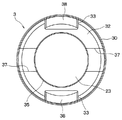
中心軸線(CL)と平行な軸方向を有する柱状に形成された、超音波送受波器(2)と、
前記超音波送受波器を弾性支持する合成樹脂系弾性部材であって、前記軸方向における前記超音波送受波器の基端側の被支持部(25)を収容するように、筒状に形成された、弾性保持部材(3)と、
前記弾性保持部材における前記軸方向に沿った外周面(30)と密着する内周面(64)を有する筒状に形成されたケース筒部(63)を備え、前記弾性保持部材を収容しつつ保持するように構成された、センサケース(6)と、
を備える。
前記ケース筒部は、前記軸方向における先端側にて開口する先端開口部(65)よりも前記軸方向における基端側にて、前記軸方向と直交する径方向における内側に突設された、係合凸部(66)を有する。
前記弾性保持部材は、
前記超音波送受波器の前記軸方向に沿った外周面である送受波器側面(21)と当接するように、前記軸方向における先端側が開口する筒状に形成された、支持筒部(31)と、
前記軸方向における前記超音波送受波器の基端側の端面である送受波器底面(23)と当接するように、前記軸方向における前記支持筒部の基端部にて前記径方向における内側に突設された、支持底部(32)と、
前記支持筒部よりも前記軸方向における基端側にて、前記係合凸部を収容するように前記径方向における内側に凹設された、係合凹部(36)と、
前記中心軸線を囲む周方向について前記係合凹部に対応する位置にて、前記支持底部から前記軸方向における基端側に突設された、先導突起部(33)と、
を有する。
前記支持底部は、前記径方向における厚さが前記支持筒部および前記先導突起部よりも大きい厚肉部として形成されている。
前記係合凹部は、前記支持底部に設けられている。
図1は、本実施形態に係る超音波センサ1の装着対象が、車両である場合の概略構成を示す。図1を参照すると、超音波センサ1は、車両に装着された車載状態にて超音波を送受信することで、当該車両の周囲の物体を検知するように構成されている。すなわち、本実施形態に係る超音波センサ1は、車載状態にて、板状の車体部品であるバンパーBに装着されるように構成されている。
以下、本実施形態の構成により奏される効果について、各図面を参照しつつ説明する。
本発明は、上記実施形態に限定されるものではない。故に、上記実施形態に対しては、適宜変更が可能である。以下、代表的な変形例について説明する。以下の変形例の説明においては、上記実施形態との相違点を主として説明する。また、上記実施形態と変形例とにおいて、互いに同一または均等である部分には、同一符号が付されている。したがって、以下の変形例の説明において、上記実施形態と同一の符号を有する構成要素に関しては、技術的矛盾または特段の追加説明なき限り、上記実施形態における説明が適宜援用され得る。
2 超音波送受波器
3 弾性保持部材
31 支持筒部
32 支持底部
33 先導突起部
36 係合凹部
6 センサケース
63 ケース筒部
66 係合凸部
Claims (6)
- 超音波センサ(1)であって、
中心軸線(CL)と平行な軸方向を有する柱状に形成された、超音波送受波器(2)と、
前記超音波送受波器を弾性支持する合成樹脂系弾性部材であって、前記軸方向における前記超音波送受波器の基端側の被支持部(25)を収容するように、筒状に形成された、弾性保持部材(3)と、
前記弾性保持部材における前記軸方向に沿った外周面(30)と密着する内周面(64)を有する筒状に形成されたケース筒部(63)を備え、前記弾性保持部材を収容しつつ保持するように構成された、センサケース(6)と、
を備え、
前記ケース筒部は、前記軸方向における先端側にて開口する先端開口部(65)よりも前記軸方向における基端側にて、前記軸方向と直交する径方向における内側に突設された、係合凸部(66)を有し、
前記弾性保持部材は、
前記超音波送受波器の前記軸方向に沿った外周面である送受波器側面(21)と当接するように、前記軸方向における先端側が開口する筒状に形成された、支持筒部(31)と、
前記軸方向における前記超音波送受波器の基端側の端面である送受波器底面(23)と当接するように、前記軸方向における前記支持筒部の基端部にて前記径方向における内側に突設された、支持底部(32)と、
前記支持筒部よりも前記軸方向における基端側にて、前記係合凸部を収容するように前記径方向における内側に凹設された、係合凹部(36)と、
前記中心軸線を囲む周方向について前記係合凹部に対応する位置にて、前記支持底部から前記軸方向における基端側に突設された、先導突起部(33)と、
を有し、
前記支持底部は、前記径方向における厚さが前記支持筒部および前記先導突起部よりも大きい厚肉部として形成され、
前記係合凹部は、前記支持底部に設けられた、
超音波センサ。 - 前記先導突起部は、前記中心軸線と直交する仮想平面と前記外周面との交線である円の接線方向と略平行な幅方向を有する舌片状に形成された、
請求項1に記載の超音波センサ。 - 前記弾性保持部材は、当該弾性保持部材を前記ケース筒部に挿入する際に前記係合凸部と当接することで、前記先導突起部が前記中心軸線側に倒れる態様で前記先導突起部を弾性変形させるように、前記先導突起部の前記軸方向における末端部にて当該弾性保持部材の前記外周面と連続して設けられた、テーパ面(38)をさらに有する、
請求項1または2に記載の超音波センサ。 - 前記テーパ面は、前記弾性保持部材を前記ケース筒部に挿入する際に前記係合凸部と当接することで前記先導突起部の弾性変形を誘発するように設けられた、
請求項3に記載の超音波センサ。 - 前記支持底部は、前記軸方向における基端側に開口することで、前記弾性保持部材を前記ケース筒部に挿入する際の、前記先導突起部と前記係合凸部との当接による前記先導突起部の弾性変形を促進するように設けられた、補助凹部(37)を有する、
請求項1〜4のいずれか1つに記載の超音波センサ。 - 前記補助凹部には、充填材(7)が充填された、
請求項5に記載の超音波センサ。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017212694A JP6897502B2 (ja) | 2017-11-02 | 2017-11-02 | 超音波センサ |
| CN201880071254.9A CN111295889B (zh) | 2017-11-02 | 2018-10-04 | 超声波传感器 |
| PCT/JP2018/037265 WO2019087675A1 (ja) | 2017-11-02 | 2018-10-04 | 超音波センサ |
| DE112018005211.7T DE112018005211T5 (de) | 2017-11-02 | 2018-10-04 | Ultraschallsensor |
| US16/865,020 US11307305B2 (en) | 2017-11-02 | 2020-05-01 | Ultrasonic sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017212694A JP6897502B2 (ja) | 2017-11-02 | 2017-11-02 | 超音波センサ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019087803A JP2019087803A (ja) | 2019-06-06 |
| JP2019087803A5 JP2019087803A5 (ja) | 2020-03-05 |
| JP6897502B2 true JP6897502B2 (ja) | 2021-06-30 |
Family
ID=66331688
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017212694A Active JP6897502B2 (ja) | 2017-11-02 | 2017-11-02 | 超音波センサ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11307305B2 (ja) |
| JP (1) | JP6897502B2 (ja) |
| CN (1) | CN111295889B (ja) |
| DE (1) | DE112018005211T5 (ja) |
| WO (1) | WO2019087675A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7024662B2 (ja) * | 2018-08-24 | 2022-02-24 | 株式会社デンソー | リテーナ部材 |
| US11899143B2 (en) | 2021-07-12 | 2024-02-13 | Robert Bosch Gmbh | Ultrasound sensor array for parking assist systems |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1343004A3 (en) * | 2002-03-06 | 2005-05-11 | NGK Spark Plug Co., Ltd. | Gas sensor and gas concentration detection device |
| JP4099751B2 (ja) * | 2002-03-07 | 2008-06-11 | 丸一株式会社 | 排水口の被覆部材 |
| JP3746728B2 (ja) * | 2002-04-10 | 2006-02-15 | 日本特殊陶業株式会社 | センサおよびその製造方法 |
| JP3628669B2 (ja) * | 2002-05-14 | 2005-03-16 | 株式会社デンソー | 超音波振動子およびその超音波振動子を有する超音波センサ |
| JP4306561B2 (ja) * | 2004-08-11 | 2009-08-05 | 株式会社デンソー | 超音波センサ |
| JP5451563B2 (ja) | 2010-09-14 | 2014-03-26 | 日立オートモティブシステムズ株式会社 | モータ制御装置 |
| KR101890616B1 (ko) * | 2012-02-20 | 2018-08-22 | 현대모비스 주식회사 | 차량용 센서 장착 구조체 |
| JP6249168B2 (ja) * | 2014-04-08 | 2017-12-20 | 株式会社デンソー | 車両用超音波センサ及びそれを備えた車両用距離検出器 |
| JP6577270B2 (ja) | 2015-07-07 | 2019-09-18 | 株式会社東海理化電機製作所 | 故障診断回路、および故障診断方法 |
| JP6559006B2 (ja) * | 2015-08-06 | 2019-08-14 | ブランソン・ウルトラソニックス・コーポレーション | 超音波振動伝達機構部の保持構造 |
| JP6593236B2 (ja) * | 2016-03-22 | 2019-10-23 | 株式会社デンソー | 超音波センサ |
| JP2017212694A (ja) | 2016-05-27 | 2017-11-30 | キヤノン株式会社 | 情報処理装置、情報処理方法及びプログラム |
-
2017
- 2017-11-02 JP JP2017212694A patent/JP6897502B2/ja active Active
-
2018
- 2018-10-04 DE DE112018005211.7T patent/DE112018005211T5/de active Granted
- 2018-10-04 WO PCT/JP2018/037265 patent/WO2019087675A1/ja active Application Filing
- 2018-10-04 CN CN201880071254.9A patent/CN111295889B/zh active Active
-
2020
- 2020-05-01 US US16/865,020 patent/US11307305B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019087675A1 (ja) | 2019-05-09 |
| US20200256984A1 (en) | 2020-08-13 |
| CN111295889B (zh) | 2022-04-05 |
| CN111295889A (zh) | 2020-06-16 |
| JP2019087803A (ja) | 2019-06-06 |
| DE112018005211T5 (de) | 2020-06-18 |
| US11307305B2 (en) | 2022-04-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4306561B2 (ja) | 超音波センサ | |
| JP6897502B2 (ja) | 超音波センサ | |
| CN106133549B (zh) | 车辆用超声波传感器及具备该传感器的车辆用距离检测器 | |
| JP6443322B2 (ja) | 超音波センサ | |
| JP2009540706A (ja) | 超音波センサ、特に自動車用超音波センサ | |
| CN110431445B (zh) | 超声波传感器 | |
| CN107367732B (zh) | 超声波传感器 | |
| US7628076B2 (en) | Ultrasound sensor | |
| WO2021215177A1 (ja) | 超音波センサおよび振動吸収体 | |
| JP2007251534A (ja) | 超音波センサ | |
| JP5984082B2 (ja) | 超音波センサ | |
| WO2019102755A1 (ja) | 超音波センサおよびリテーナ | |
| CN111386473A (zh) | 超声波传感器和保持器 | |
| JP7024662B2 (ja) | リテーナ部材 | |
| JP7167567B2 (ja) | 超音波センサ | |
| JP7334667B2 (ja) | 超音波センサおよびセンサ取付具 | |
| JP7243674B2 (ja) | 車載構造 | |
| JP2020082986A (ja) | ベゼル式ソナー | |
| JP6167658B2 (ja) | 通気部材取付冶具および電子装置の製造方法 | |
| US11049483B2 (en) | Acoustic sensor having a housing and a diaphragm element situated on this housing | |
| JP7192640B2 (ja) | 超音波センサ | |
| JP2021197617A (ja) | 超音波トランスデューサ | |
| JP2022103829A (ja) | 回転式電子部品 | |
| JP2015140848A (ja) | 防振装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200124 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200515 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210511 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210524 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6897502 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |