JP6894752B2 - 医療用処置具および手術用システム - Google Patents
医療用処置具および手術用システム Download PDFInfo
- Publication number
- JP6894752B2 JP6894752B2 JP2017091235A JP2017091235A JP6894752B2 JP 6894752 B2 JP6894752 B2 JP 6894752B2 JP 2017091235 A JP2017091235 A JP 2017091235A JP 2017091235 A JP2017091235 A JP 2017091235A JP 6894752 B2 JP6894752 B2 JP 6894752B2
- Authority
- JP
- Japan
- Prior art keywords
- pulley
- medical treatment
- axis
- elongated element
- treatment tool
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/2812—Surgical forceps with a single pivotal connection
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
- A61B2034/306—Wrists with multiple vertebrae
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Robotics (AREA)
- Ophthalmology & Optometry (AREA)
- Manipulator (AREA)
- Surgical Instruments (AREA)
Description
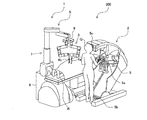
図1は、本発明の手術用システムの構成を示す図である。
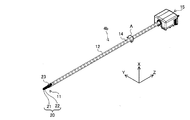
図2は、本発明の医療用処置具の構成を示す図である。
(先端部の全体構成)
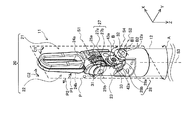
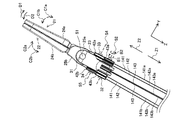
図3は、本発明の医療用処置具における先端部の構成を示す斜視図である。
再び図4を参照して、Z軸方向における手首部材23のシャフト12側の端部に位置するクレビス28は、たとえばU字形状を有し、第2連結部32の第1端側に位置する山部28aと、第2連結部32の第2端側に位置する山部28bとを有する。たとえば、山部28a,28bには、それぞれ図示しない貫通孔が形成されており、これら2つの貫通孔を第2連結部32が挿通する。
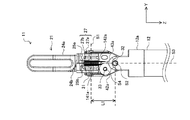
図6は、本発明の医療用処置具における先端部側の細長要素の巻き掛けの一例を示す図である。図6において、矢印Z1はシャフト軸と平行なZ軸の正の方向を示し、矢印Z2はZ軸の負の方向を示す。
細長要素141におけるワイヤ141aが矢印Z1の方向に引かれると、ジョー22は、矢印C2aの方向、すなわち第1軸S1を中心とする円の周方向であって、ジョー21へ近づく方向に旋回する。また、細長要素141におけるワイヤ141bが矢印Z1の方向に引かれると、ジョー22は、矢印C2bの方向、すなわち第1軸S1を中心とする円の周方向であって、ジョー21から離れる方向に旋回する。
上述した先端部11は、第1軸S1を中心に旋回可能な2つのジョー21,22を有するが、このような構成に限定されない。
図8は、本発明の駆動機構の構成を示す斜視図である。
再び図4を参照して、先端部11は、さらに、複数のベアリング161を有する。第2プーリ43a、第4プーリ43b、および第5プーリ41は、ベアリング161を介して、第2連結部32に取り付けられる。また、第1プーリ42aは、ベアリング161を介して、第3連結部33に取り付けられる。また、第3プーリ42bは、ベアリング161を介して、第4連結部34に取り付けられる。さらに、図3に示すプーリ部25a,25bは、図3において図示しないベアリング161を介して、第1連結部31に取り付けられる。
図10は、本発明の医療用処置具における手首部材と第5プーリとの接続関係を示す図である。
図12は、手首部材と第5プーリとの接続関係の変形例を示す図である。
図13は、本発明の医療用処置具における細長要素の構成の例1を示す図である。
13 硬性チューブ
14,141,142,143 細長要素
143c 凸部
20 エンドエフェクタ
21,22 ジョー
23 手首部材
23a 凹部
31 第1連結部
32 第2連結部
41 第5プーリ
41a 凹部
42a 第1プーリ
42b 第3プーリ
43a 第2プーリ
43b 第4プーリ
161 ベアリング
171 内輪部材
172 外輪部材
173 第1ボールグループ
174 第2ボールグループ
175 第1リテイナー
176 第2リテイナー
Claims (15)
- 第1のプーリ部および前記第1のプーリ部から延びる第1指部を含む第1のジョーと、第2のプーリ部および前記第2のプーリ部から延びる第2指部を含む第2のジョーと、を含むエンドエフェクタと、
特定方向に延び、前記特定方向における第1端側において第1連結部を介して前記第1のプーリ部および前記第2のプーリ部が回転可能に取り付けられる手首部材と、
シャフト軸を有し、前記手首部材の前記特定方向における前記第1端と反対側の第2端が第2連結部を介して回転可能に取り付けられるシャフトと、
前記手首部材に取り付けられる第1プーリと、
前記特定方向に関して前記第1プーリよりも前記手首部材の第2端側に配置され、前記第2連結部により規定される第2軸と平行な回転軸を有する第2プーリとを備え、
前記第1のプーリ部は、前記第1のプーリ部の回転軸である第1軸の軸方向において前記第1連結部の第1端側に配置され、かつ自己の円周方向に沿う溝が形成され、
前記第2のプーリ部は、前記第1軸の軸方向において前記第1連結部の第1端側とは反対側の第2端側に配置され、
前記第1プーリおよび前記第2プーリは、前記エンドエフェクタの長手方向および前記手首部材の前記特定方向が前記シャフト軸と平行となる姿勢において、前記シャフト軸および前記第1軸を含む面に対して一方側で、且つ、前記第1指部の位置する側に配置され、
前記第1プーリの回転軸および前記第2プーリの回転軸は、前記面と交差し、
前記第1プーリの回転軸は、前記第1軸の軸方向において前記第1連結部の第1端よりも前記第1連結部の第2端に近い側に配置される、医療用処置具。 - 前記医療用処置具は、さらに、
前記手首部材に取り付けられる第3プーリと、
前記特定方向に関して前記第3プーリよりも前記手首部材の第2端側に配置され、前記第2軸と平行な回転軸を有する第4プーリとを備え、
前記第2のプーリ部は、自己の円周方向に沿う溝が形成され、
前記第3プーリ、前記第4プーリ、および前記第2指部は、前記面に対して前記一方側とは反対の他方側に位置し、
前記第3プーリの回転軸および前記第4プーリの回転軸は、前記面と交差し、
前記第3プーリの回転軸は、前記第1軸の軸方向において前記第1連結部の第2端よりも前記第1連結部の第1端に近い側に配置される、請求項1に記載の医療用処置具。 - 前記医療用処置具は、さらに、
前記第1のジョーを操作するための第1細長要素を備え、
前記第1細長要素は、前記第1のプーリ部によってガイドされ、さらに、前記第1連結部の第1端側から前記第1プーリと前記第2プーリとの間へ向けて、前記間を通るようにガイドされる、請求項1または請求項2に記載の医療用処置具。 - 前記第1連結部から前記第2連結部までの長さは8mm未満である、請求項1から請求項3のいずれか1項に記載の医療用処置具。
- 前記第1プーリおよび/または前記第2プーリは、ベアリングを含み、
前記ベアリングを含む前記第1プーリおよび/または前記第2プーリは、
リング形状を有する内輪部材と、
リング形状を有し、径の大きさが前記内輪部材の径より大きい外輪部材と、
複数の第1ボールを含む第1ボールグループと、
複数の第2ボールを含む第2ボールグループと、
リング形状を有し、前記複数の第1ボールを収容する第1リテイナーと、
リング形状を有し、前記複数の第2ボールを収容する第2リテイナーとを有し、
前記第1リテイナーおよび前記第2リテイナーは、各々の中心軸が一致した状態で当接されて、前記内輪部材と前記外輪部材との間に設けられる、請求項1から請求項4のいずれか1項に記載の医療用処置具。 - 前記第1ボールおよび前記第2ボールは、前記第1リテイナーおよび前記第2リテイナーの周方向において交互に配置される、請求項5に記載の医療用処置具。
- 前記第1ボールの一部分は、前記第2リテイナーに収容され、
前記第2ボールの一部分は、前記第1リテイナーに収容される、請求項5または請求項6に記載の医療用処置具。 - 前記第3プーリおよび/または前記第4プーリは、ベアリングを含み、
前記ベアリングを含む前記第3プーリおよび/または前記第4プーリは、
リング形状を有する内輪部材と、
リング形状を有し、径の大きさが前記内輪部材の径より大きい外輪部材と、
複数の第1ボールを含む第1ボールグループと、
複数の第2ボールを含む第2ボールグループと、
リング形状を有し、前記複数の第1ボールを収容する第1リテイナーと、
リング形状を有し、前記複数の第2ボールを収容する第2リテイナーとを有し、
前記第1リテイナーおよび前記第2リテイナーは、各々の中心軸が一致した状態で当接されて、前記内輪部材と前記外輪部材との間に設けられる、請求項2に記載の医療用処置具。 - 前記医療用処置具は、
前記第1のジョーを操作するための第1細長要素と、
前記第2のジョーを操作するための第2細長要素と、
前記手首部材を操作するための第3細長要素とを備える、請求項1から請求項8のいずれか1項に記載の医療用処置具。 - 前記第1細長要素、前記第2細長要素および前記第3細長要素の少なくとも一つの中間部分が硬質部材により形成されたロッドを含む、請求項9に記載の医療用処置具。
- 前記第1細長要素、前記第2細長要素および前記第3細長要素のうちの少なくとも一つの一部分が硬性チューブによって被覆され、
前記硬性チューブの長手方向における両端部のうちの少なくとも一方の端部が、面取り加工されている、請求項9に記載の医療用処置具。 - 前記医療用処置具は、さらに、
前記第3細長要素をガイドし、かつ前記第2軸を中心に回転可能である第5プーリを備え、
前記第3細長要素は、凸部を有し、
前記凸部は、前記第5プーリに形成された凹部、および前記手首部材の第2端に形成された凹部の両方に係合される、請求項9から請求項11のいずれか1項に記載の医療用処置具。 - 前記第1細長要素は、凸部を有し、
前記凸部は、前記第1のジョーに形成された凹部に係合される、請求項9から請求項12のいずれか1項に記載の医療用処置具。 - 前記医療用処置具は、さらに、
前記第1細長要素、前記第2細長要素および前記第3細長要素をそれぞれ駆動する第1駆動部材、第2駆動部材および第3駆動部材を備え、
第1駆動部材、前記第2駆動部材および第3駆動部材は、それぞれ、伝達部材と係合する被伝達部材を含む、請求項9から請求項13のいずれか1項に記載の医療用処置具。 - 請求項14に記載の医療用処置具と、
前記伝達部材を動作させるアクチュエータを含むマニピュレータとを備える、手術用システム。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017091235A JP6894752B2 (ja) | 2017-05-01 | 2017-05-01 | 医療用処置具および手術用システム |
| EP18169795.4A EP3395279A1 (en) | 2017-05-01 | 2018-04-27 | Medical treatment tool and surgical system |
| CN201810390248.1A CN108836483B (zh) | 2017-05-01 | 2018-04-27 | 医疗用处理工具以及手术用系统 |
| US15/964,672 US11071600B2 (en) | 2017-05-01 | 2018-04-27 | Medical treatment tool and surgical system |
| JP2020013477A JP6975273B2 (ja) | 2017-05-01 | 2020-01-30 | 手術用システムおよび医療用処置具 |
| US16/782,070 US20200170729A1 (en) | 2017-05-01 | 2020-02-05 | Medical treatment tool and surgical system |
| US16/782,061 US20200170728A1 (en) | 2017-05-01 | 2020-02-05 | Medical treatment tool and surgical system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017091235A JP6894752B2 (ja) | 2017-05-01 | 2017-05-01 | 医療用処置具および手術用システム |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020013480A Division JP2020062541A (ja) | 2020-01-30 | 2020-01-30 | 医療用処置具および手術用システム |
| JP2020013477A Division JP6975273B2 (ja) | 2017-05-01 | 2020-01-30 | 手術用システムおよび医療用処置具 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018187029A JP2018187029A (ja) | 2018-11-29 |
| JP2018187029A5 JP2018187029A5 (ja) | 2020-01-09 |
| JP6894752B2 true JP6894752B2 (ja) | 2021-06-30 |
Family
ID=62116222
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017091235A Expired - Fee Related JP6894752B2 (ja) | 2017-05-01 | 2017-05-01 | 医療用処置具および手術用システム |
Country Status (4)
| Country | Link |
|---|---|
| US (3) | US11071600B2 (ja) |
| EP (1) | EP3395279A1 (ja) |
| JP (1) | JP6894752B2 (ja) |
| CN (1) | CN108836483B (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7009428B2 (ja) | 2019-09-26 | 2022-01-25 | 株式会社メディカロイド | 手術器具 |
| JP7155093B2 (ja) * | 2019-10-23 | 2022-10-18 | 株式会社メディカロイド | 手術器具 |
| JP7306225B2 (ja) * | 2019-10-31 | 2023-07-11 | 株式会社アイシン | 便座装置 |
| JP6815679B2 (ja) * | 2020-08-18 | 2021-01-20 | リバーフィールド株式会社 | 術具 |
| KR102308214B1 (ko) | 2020-12-09 | 2021-10-05 | 주식회사 리브스메드 | 수술용 인스트루먼트의 엔드 툴 및 그 제조 방법 |
| CN112617968B (zh) * | 2020-12-31 | 2022-08-26 | 杭州康基医疗器械有限公司 | 可多向转动的手术钳头结构 |
| CN118475312A (zh) * | 2022-01-17 | 2024-08-09 | 瑞德医疗机器股份有限公司 | 镊子装置 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53105010U (ja) * | 1977-01-25 | 1978-08-24 | ||
| US6398726B1 (en) | 1998-11-20 | 2002-06-04 | Intuitive Surgical, Inc. | Stabilizer for robotic beating-heart surgery |
| US6394998B1 (en) | 1999-01-22 | 2002-05-28 | Intuitive Surgical, Inc. | Surgical tools for use in minimally invasive telesurgical applications |
| US6902560B1 (en) * | 2000-07-27 | 2005-06-07 | Intuitive Surgical, Inc. | Roll-pitch-roll surgical tool |
| JP3944172B2 (ja) * | 2004-01-27 | 2007-07-11 | オリンパス株式会社 | 外科用処置具 |
| US7935130B2 (en) | 2006-11-16 | 2011-05-03 | Intuitive Surgical Operations, Inc. | Two-piece end-effectors for robotic surgical tools |
| EP4233962B1 (en) * | 2007-05-18 | 2025-11-05 | Boston Scientific Scimed, Inc. | Medical drive systems |
| US8758342B2 (en) | 2007-11-28 | 2014-06-24 | Covidien Ag | Cordless power-assisted medical cauterization and cutting device |
| US8540748B2 (en) | 2008-07-07 | 2013-09-24 | Intuitive Surgical Operations, Inc. | Surgical instrument wrist |
| US9204923B2 (en) * | 2008-07-16 | 2015-12-08 | Intuitive Surgical Operations, Inc. | Medical instrument electronically energized using drive cables |
| US8821480B2 (en) * | 2008-07-16 | 2014-09-02 | Intuitive Surgical Operations, Inc. | Four-cable wrist with solid surface cable channels |
| US20100168721A1 (en) * | 2008-12-30 | 2010-07-01 | Intuitive Surgical, Inc. | Lubricating tendons in a tendon-actuated surgical instrument |
| JP2011045500A (ja) | 2009-08-26 | 2011-03-10 | Terumo Corp | 医療用マニピュレータ |
| JP2011200593A (ja) * | 2010-03-26 | 2011-10-13 | Terumo Corp | 医療器具 |
| CN202520781U (zh) * | 2012-02-29 | 2012-11-07 | 张亚军 | 一种设有非对称兜孔的轴承 |
| JP5951345B2 (ja) * | 2012-05-01 | 2016-07-13 | Hoya株式会社 | 内視鏡用スネア |
| US9351754B2 (en) | 2012-06-29 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Ultrasonic surgical instruments with distally positioned jaw assemblies |
| WO2014030110A1 (en) | 2012-08-21 | 2014-02-27 | Chinmay Deodhar | Wristed surgical instrument capable of multiple functions, without requiring extra inputs |
| JP6616281B2 (ja) | 2013-03-14 | 2019-12-04 | エスアールアイ インターナショナル | コンパクトなロボット手首部 |
| EP3222241A4 (en) | 2014-11-18 | 2018-08-01 | Olympus Corporation | Endoscopic treatment instrument |
| GB201521812D0 (en) | 2015-12-10 | 2016-01-27 | Cambridge Medical Robotics Ltd | Driving a surgical instrument articulation |
| GB201521805D0 (en) | 2015-12-10 | 2016-01-27 | Cambridge Medical Robotics Ltd | Guiding engagement of a robot arm and surgical instrument |
-
2017
- 2017-05-01 JP JP2017091235A patent/JP6894752B2/ja not_active Expired - Fee Related
-
2018
- 2018-04-27 CN CN201810390248.1A patent/CN108836483B/zh not_active Expired - Fee Related
- 2018-04-27 US US15/964,672 patent/US11071600B2/en not_active Expired - Fee Related
- 2018-04-27 EP EP18169795.4A patent/EP3395279A1/en not_active Withdrawn
-
2020
- 2020-02-05 US US16/782,070 patent/US20200170729A1/en not_active Abandoned
- 2020-02-05 US US16/782,061 patent/US20200170728A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| CN108836483A (zh) | 2018-11-20 |
| US20200170729A1 (en) | 2020-06-04 |
| US11071600B2 (en) | 2021-07-27 |
| US20200170728A1 (en) | 2020-06-04 |
| CN108836483B (zh) | 2021-05-14 |
| JP2018187029A (ja) | 2018-11-29 |
| US20180311000A1 (en) | 2018-11-01 |
| EP3395279A1 (en) | 2018-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6894752B2 (ja) | 医療用処置具および手術用システム | |
| JP6961733B2 (ja) | 改善された可動域を有する機械的なリストジョイント、関連装置、及び方法 | |
| US12256911B2 (en) | Operating self-antagonistic drives of medical instruments | |
| US11576735B2 (en) | Controllable steerable instrument | |
| KR102571618B1 (ko) | 로봇 미세수술 조립체 | |
| US20180214220A1 (en) | Surgical robot | |
| US20180242991A1 (en) | Surgical instrument with increased actuation force | |
| WO2017006373A1 (ja) | ロボットアームの関節及び外科機器 | |
| JP6811676B2 (ja) | 駆動部材、駆動機構、および駆動機構の製造方法 | |
| JP6836649B2 (ja) | 医療用処置具および手術システム | |
| US11457904B2 (en) | Reduced diameter steerable instrument | |
| JP2008220972A (ja) | 処置具 | |
| CN116492054A (zh) | 手术器械腕部 | |
| JP2008220971A (ja) | 処置具 | |
| JP6975273B2 (ja) | 手術用システムおよび医療用処置具 | |
| JPWO2020105616A1 (ja) | 屈曲機構及び医療装置 | |
| EP4106636B1 (en) | End-effector for endoscopic surgical instrument | |
| JP4145309B2 (ja) | 処置具 | |
| CN115957010B (zh) | 一种柔性关节、手术器械及手术机器人 | |
| JP2020062541A (ja) | 医療用処置具および手術用システム | |
| JP6895007B2 (ja) | 医療用処置具 | |
| CN222853979U (zh) | 手术器械及医疗系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170519 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191114 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200421 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200609 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200717 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210601 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210604 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6894752 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |