JP6875923B2 - スケール装置および二軸変位検出装置 - Google Patents
スケール装置および二軸変位検出装置 Download PDFInfo
- Publication number
- JP6875923B2 JP6875923B2 JP2017088413A JP2017088413A JP6875923B2 JP 6875923 B2 JP6875923 B2 JP 6875923B2 JP 2017088413 A JP2017088413 A JP 2017088413A JP 2017088413 A JP2017088413 A JP 2017088413A JP 6875923 B2 JP6875923 B2 JP 6875923B2
- Authority
- JP
- Japan
- Prior art keywords
- origin mark
- scale
- axis
- linear scale
- row
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34776—Absolute encoders with analogue or digital scales
- G01D5/34792—Absolute encoders with analogue or digital scales with only digital scales or both digital and incremental scales
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/266—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light by interferometric means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34707—Scales; Discs, e.g. fixation, fabrication, compensation
- G01D5/34715—Scale reading or illumination devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34776—Absolute encoders with analogue or digital scales
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D2205/00—Indexing scheme relating to details of means for transferring or converting the output of a sensing member
- G01D2205/90—Two-dimensional encoders, i.e. having one or two codes extending in two directions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/245—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains using a variable number of pulses in a train
- G01D5/2454—Encoders incorporating incremental and absolute signals
- G01D5/2455—Encoders incorporating incremental and absolute signals with incremental and absolute tracks on the same encoder
- G01D5/2457—Incremental encoders having reference marks
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optical Transform (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
Description
走査されることにより、X軸方向の座標位置を検出する信号を発生するリニアスケールと、
検出されることによりX軸の座標原点を示す基準原点信号を生成せしめる複数の原点マークが列状に並んだ原点マーク列であって、前記リニアスケールがなす第1平面に平行な第2平面上に延在し、前記X軸方向に直交するY軸方向に延びる基準原点マーク列と、
前記第2平面上において前記基準原点マーク列と非平行となるように傾斜角度を付けて延在して設けられた第1傾斜原点マーク列と、
前記リニアスケール上を走査する読取ヘッドであって、この読取ヘッドを移動するにつれて、前記基準原点マーク列と前記第1傾斜原点マーク列と順次交叉して夫々の前記基準原点マーク列上の原点マークを読み取る読取ヘッドと、
を具備する。
上記のスケール装置が接続された二軸変位検出装置であって、
前記読取ヘッドは、前記読取ヘッドが前記リニアスケールをX軸方向に走査するとX軸方向についての現走査位置を示す相対位置情報信号を出力し、また、前記Y軸方向の任意のY座標位置に移動可能に配置されており、
この二軸変位検出装置は、
前記任意のY座標位置おいて、前記X軸方向で前記基準原点マーク列と前記第1傾斜原点マーク列との間で走査することにより、前記任意のY軸位置における一組の基準原点マークと傾斜原点マークとの間の相対的距離を計数する手段と、
前前任意のY軸位置における前記一組の基準原点マークと傾斜原点マークとの間の前記相対的距離に応じて、前記任意のY軸座標位置での絶対的Y軸位置を算出する手段と、
を具備する。
<第1実施形態のリニアスケールと変位検出装置>
以下、本発明の第1実施形態の変位検出装置について、図1、図2などを用いて説明する。

図1(a)、図1(b)に開示された構成のリニアスケールを第1実施形態の第1実施例とすれば、図1(c)を参照して、この第1実施例に対する変形例(第2変形実施例)としてのリニアスケールを説明する。
本実施形態のリニアスケール1000ならびに変位検出装置では、ヘッドの走査方向はX軸に平行であることを前提としたが、実際の加工現場では、走査方向はX軸方向に対して経年変化でずれてくる。また、実際の加工現場では平行で無い状態が要請される場合もあり得る。また、リニアスケールの適用分野によっては、走査方向を意図的にX軸に対して(角度γ)傾けて走査させることもある。走査方向がX軸に対して傾いていることを考慮しないで第1実施形態の手法に従って検出したY方向絶対位置は当然ながら誤差を有する。
本実施形態は、X軸用の原点マーク列を利用して、Y軸用の原点情報を生成することができた。この図1(a)並びに図1(b)のリニアスケール1000を本実施形態の第1実施例とすれば、図2に、本実施形態の第2実施例のリニアスケールの構成を示す。
以上説明した第1実施形態の装置ならびにリニアスケール1000によれば、
(1)第1実施形態の位置検出装置は、1つの方向(例えばX方向)の位置変位を検出することが可能なリニアスケールについて、基準原点マーク列に加えて、傾斜原点マーク列を設けている。そのリニアスケールについて、X方向で読み取る読取ヘッドを有するスケールをX方向に垂直なY方向に移動するような適用分野に適用した場合には、Y方向の原点マークが設けられているのと同様に、Y方向変位の絶対位置を検出することができることとなる。
図5乃至図6Bを参照して、本発明の第2実施形態に従った、二次元スケールと変位検出装置との構成を説明する。第2実施形態の変位検出システムは、XYの両方向で、インクリメント信号を生成可能な二次元スケールを用いて、インクリメンタル方式でXY方向において変位検出が可能である、という通常の変位検出システムに対して、第1実施形態の「基準原点マーク列」と「傾斜原点マーク列」とを有するスケールを追加して、XYの両方向で変位の絶対位置を計測可能にしたものである。
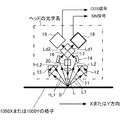
変形例として、格子のピッチ間隔に、2次関数に従った変調を加える。即ち、図5のX方向スケール1050Xに対しては上記変調を加えることによって、図6AのX方向に好適な格子パターンと、図6Bの方向に好適な格子パターンが生成される。
第1実施形態、第2実施形態は本発明のスケールに、リニアスケールを採用するものである。他方、これから説明する第3実施形態は二次元スケールを利用するものである。
上述の第1実施形態並びに第2実施形態のスケールはリニアスケールを1つまたは2つ使うものであった。第3実施形態のスケールは図7若しくは図9の複雑な形状格子からなる二次元スケールである。
図7(a)の格子パターン2000は、その中心から離間するほど、格子ピッチが大きくなる、というものである。このような分布が生まれるのは、二次元スケール2000の格子パターンを、図8の如き露光装置を用いて製造しているためである。
図7の二次元スケールと、この二次元スケールを組み込んだ変位検出装置(図10)が上述の問題に対処する「補正」を実現する。図10において、本実施形態の変位検出装置3000は、図7の二次元スケール2000と連携して種々の処理を行う。
ヘッドが出力するsin信号、cos信号に関連して、演算部で行われる内挿を説明する。
第1実施形態乃至第3実施形態に特徴の1つはY方向の原点マークの検出は行わず、Y方向変位量演算部2330では、インクリメンタル信号の演算に留まる。即ち、Y方向変位量演算部2330は、相対的なn位置における位置Y(n)をインクリメンタル信号の離散的位置毎に計算することはできる。また、Y方向変位量演算部2330は、sin信号とcos信号とに基づいて内挿演算はできるので、クロス処理で検出した分解能の低いY位置に留まらず、内挿によって計算したY位置を相対位置の離散的な座標値として計算できる。
本実施形態の二次元スケールは図9などに示すように、格子の形状が二次関数近似による変調がなされているために、この変調により、格子形状に理論値との誤差がある。3つのヘッドが検出するsin信号、cos信号にはこの誤差が乗っており、この誤差は、演算部が出力するXY絶対位置にも包含されており、除去は必須である。
列アドレスカウンタには補正前のY方向絶対位置情報Yabs、
行アドレスカウンタには補正前のX方向絶対位置情報Xabs、
が入力される。同じく、X補正データメモリ2350の:
列アドレスカウンタには補正前のY方向絶対位置情報Yabs、
行アドレスカウンタには補正前のX方向絶対位置情報Xabs、
が入力される。換言すれば、補正データCy用メモリ2340と補正データCx用メモリ2350のアドレッシングは、共に、補正前の、X絶対位置XabsとY絶対位置Yabsとである。
Cx(Xabs、Yabs)
Cy(Xabs、Yabs)
となる。補正部2400では、補正後の絶対位置を:
補正前X絶対位置+Cx(Xabs、Yabs)
補正前Y絶対位置+Cy(Xabs、Yabs)
に従って計算される。
本実施形態のデータメモリは、サンプリングは10毎に行っていたが、所望の分解能に応じてさらに細かく、或いは、粗くすることは可能である。なお、球面波で露光した二次元スケールを説明したが、平面波で露光した2次元リニアスケールにしてもよい。
以上、実施形態を参照して本願発明を説明したが、本願発明は上記実施形態に限定されるものではない。本願発明の構成や詳細には、本願発明のスコープ内で当業者が理解し得る様々な変更をすることができる。また、それぞれの実施形態に含まれる別々の特徴を如何様に組み合わせたシステムまたは装置も、本発明の範疇に含まれる。
Claims (7)
- X軸の座標原点を示す基準原点マーク列であって、前記X軸方向に直交するY軸方向に延びる基準原点マーク列と、
前記基準原点マーク列と非平行となるように傾斜角度を付けて設けられた第1傾斜原点マーク列と、
前記基準原点マーク列と第1傾斜原点マーク列と非平行となる第2傾斜原点マーク列と、
を含むリニアスケールと、
前記リニアスケール上を走査し、前記基準原点マーク列と前記第1傾斜原点マーク列と前記第2傾斜原点マーク列と交差して前記基準原点マーク列を読み取る読取ヘッドと、
を具備するスケール装置。 - 前記第1傾斜原点マーク列と前記第2傾斜原点マーク列とが、前記基準原点マーク列を挟む位置に設けられた請求項1に記載のスケール装置。
- 前記スケール装置は干渉位相差を検出する光学式リニアスケール装置である請求項1または2に記載のスケール装置。
- 請求項1乃至3のいずれか1項に記載のスケール装置が接続された二軸変位検出装置であって、
前記読取ヘッドは、前記リニアスケールをX軸方向に走査して、X軸方向についての現走査位置を示す相対位置信号を出力し、前記Y軸方向の任意のY座標位置に移動可能に配置されており、
この二軸変位検出装置は、
前記任意のY座標位置おいて、前記読取ヘッドが、前記リニアスケールを前記X軸方向に走査して、前記基準原点マーク列と前記第1傾斜原点マーク列と前記第2傾斜原点マーク列と交差した場合に、前記任意のY軸位置における基準原点マーク列と前記第1、第2傾斜原点マーク列のそれぞれとの間の距離を計数する手段と、
前記距離に応じて、前記任意のY軸位置での絶対的Y軸位置を算出する手段と、
を具備する二軸変位検出装置。 - 前記二軸変位検出装置は、
前記リニアスケールの製造公差に起因する前記相対位置信号の誤差を補正する補正データを、前記リニアスケールの製造時点で記憶する第1メモリと、
前記リニアスケールを走査して前記読取ヘッドが検出したX軸および/またはY軸の相対位置信号を、前記読取ヘッドが前記基準原点マーク列と前記第1、第2傾斜原点マーク列とを読み出して検出したX軸および/またはY軸の原点信号に従って、Y軸の絶対位置信号に変換すると共に、変換した絶対位置信号に基づいて前記第1メモリから前記補正データを読み出して、読み出した前記補正データを、前記変換した絶対位置信号に適用して、補正後の絶対位置情報として出力する補正手段と、
を具備する請求項4に記載の二軸変位検出装置。 - 前記二軸変位検出装置は、さらに、
前もって、所定の時点で計測した前記任意のY軸位置における前記基準原点マーク列と前記第1、第2傾斜原点マーク列のそれぞれとの間の距離を記憶している第2メモリと、
任意の時点で算出した前記距離と、前記第2メモリに記憶された前記距離とに基づいて、前記読取ヘッドもしくは前記リニアスケールのいずれかがX軸に対して傾いているか否かを判断する手段と、
を具備した請求項4又は5に記載の二軸変位検出装置。 - 前記所定の時点は、前記読取ヘッドもしくは前記リニアスケールの双方がX軸に対して傾いていないことを確認した時点である請求項6に記載の二軸変位検出装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017088413A JP6875923B2 (ja) | 2017-04-27 | 2017-04-27 | スケール装置および二軸変位検出装置 |
| DE102018108882.5A DE102018108882A1 (de) | 2017-04-27 | 2018-04-13 | Skalenvorrichtung und zweiachsige Verlagerungsdetektionsvorrichtung |
| US15/957,660 US10634521B2 (en) | 2017-04-27 | 2018-04-19 | Scale device and two-axis displacement detection device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017088413A JP6875923B2 (ja) | 2017-04-27 | 2017-04-27 | スケール装置および二軸変位検出装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018185272A JP2018185272A (ja) | 2018-11-22 |
| JP2018185272A5 JP2018185272A5 (ja) | 2020-01-30 |
| JP6875923B2 true JP6875923B2 (ja) | 2021-05-26 |
Family
ID=63797215
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017088413A Active JP6875923B2 (ja) | 2017-04-27 | 2017-04-27 | スケール装置および二軸変位検出装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10634521B2 (ja) |
| JP (1) | JP6875923B2 (ja) |
| DE (1) | DE102018108882A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016214456A1 (de) * | 2016-08-04 | 2018-02-08 | Dr. Johannes Heidenhain Gesellschaft Mit Beschränkter Haftung | Positionsmesseinrichtung und Verfahren zum Betreiben einer Positionsmesseinrichtung |
| DE102020118659A1 (de) * | 2019-07-17 | 2021-01-21 | Dmg Mori Co., Ltd. | Detektionsvorrichtung |
| EP3789735B1 (de) | 2019-09-04 | 2021-11-10 | Dr. Johannes Heidenhain GmbH | Positionsmesseinrichtung |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5023618B1 (ja) | 1970-05-20 | 1975-08-08 | ||
| JPS5246093B2 (ja) | 1973-07-02 | 1977-11-21 | ||
| DE3542514A1 (de) * | 1985-12-02 | 1987-06-04 | Zeiss Carl Fa | Wegmesseinrichtung |
| US6649925B2 (en) * | 1999-11-26 | 2003-11-18 | Amos Talmi | Methods of calibrating a position measurement device |
| JP4404184B2 (ja) * | 2002-11-18 | 2010-01-27 | ソニーマニュファクチュアリングシステムズ株式会社 | 変位検出装置 |
| DE102008010284A1 (de) * | 2008-02-21 | 2009-08-27 | Dr. Johannes Heidenhain Gmbh | XY-Tisch mit einer Messanordnung zur Positionsbestimmung |
| JP5126287B2 (ja) * | 2010-05-31 | 2013-01-23 | 株式会社安川電機 | リニアエンコーダ、リニアモータ、リニアモータシステム |
| JP6245941B2 (ja) * | 2012-12-10 | 2017-12-13 | Dmg森精機株式会社 | 変位検出装置 |
| EP3306273B1 (de) * | 2014-12-04 | 2020-02-05 | Hexagon Technology Center GmbH | Kapazitiver linearencoder |
| EP3064902B1 (de) * | 2015-03-06 | 2017-11-01 | Hexagon Technology Center GmbH | System zur bestimmung von positionen |
| JP6361760B2 (ja) | 2017-02-27 | 2018-07-25 | ブラザー工業株式会社 | 画像記録装置 |
-
2017
- 2017-04-27 JP JP2017088413A patent/JP6875923B2/ja active Active
-
2018
- 2018-04-13 DE DE102018108882.5A patent/DE102018108882A1/de active Pending
- 2018-04-19 US US15/957,660 patent/US10634521B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10634521B2 (en) | 2020-04-28 |
| JP2018185272A (ja) | 2018-11-22 |
| DE102018108882A1 (de) | 2018-10-31 |
| US20180313671A1 (en) | 2018-11-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5147367B2 (ja) | エンコーダ | |
| JP5147368B2 (ja) | エンコーダ | |
| US8822907B2 (en) | Optical position-measuring device having two crossed scales | |
| JP4246071B2 (ja) | 座標測定機械における案内誤差を求めかつ補正する方法 | |
| JP5804899B2 (ja) | 光学式角度測定装置 | |
| JP6875923B2 (ja) | スケール装置および二軸変位検出装置 | |
| JP7222081B2 (ja) | 線形及び回転マルチトラック絶対位置エンコーダ並びにそれを使用した方法 | |
| US6914235B2 (en) | Position measuring system and method for operating a position measuring system | |
| KR20140048824A (ko) | 교정 장치, 교정 방법 및 계측 장치 | |
| US7586621B2 (en) | Displacement-measuring optical scale and optical encoder using same | |
| US7112782B2 (en) | Optical position measuring system | |
| US10190893B2 (en) | Encoder | |
| US7161139B2 (en) | Position-measuring system and method for operating a position-measuring system | |
| US10859374B2 (en) | Optical angle sensor | |
| US11353583B2 (en) | Optical position-measurement device with varying focal length along a transverse direction | |
| EP2955490A2 (en) | Displacement detecting device | |
| JP2016130728A (ja) | 光学式位置測定装置 | |
| US7196319B2 (en) | Position-measuring device | |
| JP4494189B2 (ja) | 非接触画像測定機の精度測定方法及び校正方法 | |
| JP2011145150A (ja) | 光学式エンコーダの設計方法 | |
| JP7066189B2 (ja) | 絶対位置測定装置および絶対位置測定方法 | |
| JPH08285527A (ja) | 変位検出装置及び変位検出方法 | |
| CN119437048A (zh) | 光学位置测量器 | |
| JP2016166874A (ja) | 光学式角度測定装置 | |
| JP2009270945A (ja) | 光学式測定装置及び位置合わせシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191211 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191211 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210308 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210406 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210423 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6875923 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE Ref document number: 6875923 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |