JP6860619B2 - 作業車 - Google Patents
作業車 Download PDFInfo
- Publication number
- JP6860619B2 JP6860619B2 JP2019113832A JP2019113832A JP6860619B2 JP 6860619 B2 JP6860619 B2 JP 6860619B2 JP 2019113832 A JP2019113832 A JP 2019113832A JP 2019113832 A JP2019113832 A JP 2019113832A JP 6860619 B2 JP6860619 B2 JP 6860619B2
- Authority
- JP
- Japan
- Prior art keywords
- receiving device
- traveling
- steering
- traveling machine
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Guiding Agricultural Machines (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
図1〜図3に示されるように、農作業車のうちの植播系水田作業車である乗用型の田植機(「作業車」の一例)には、走行装置Aを有する走行機体Cと、圃場に対する作業を行う作業装置と、が備えられている。田植機の作業装置は、圃場に対する苗の植え付けが可能な苗植付装置Wである。なお、図2に示す矢印Fが走行機体Cの「前」、矢印Bが走行機体Cの「後」、矢印Lが走行機体Cの「左」、矢印Rが走行機体Cの「右」である。
図1に示されるように、苗植付装置Wは、油圧シリンダで構成される昇降シリンダ20の伸縮作動により昇降作動するリンク機構21を介して、走行機体Cの後端に昇降自在に連結されている。
図1〜図3に示されるように、走行機体Cにおけるボンネット12の左右側部には、苗植付装置Wに補給するための予備苗を載置可能な複数(例えば4つ)の通常予備苗台28(「予備苗台」の一例)、苗植付装置Wに補給するための予備苗を載置可能な1つのレール式予備苗台29(「予備苗台」の一例)が備えられている。また、走行機体Cにおけるボンネット12の左右側部には、各通常予備苗台28とレール式予備苗台29とを支持する左右一対の予備苗フレーム30と、左右の予備苗フレーム30の上部に亘って連結される連結フレーム31と、が備えられている。連結フレーム31は、前面視で、U字状の形状となっている。連結フレーム31の左右端部は、それぞれ、連結ブラケット32を介して、左右の予備苗フレーム30の上部に連結されている。
図1に示されるように、苗植付装置Wの左右側部には、それぞれ、圃場の田面に指標ラインLN(図6、図7参照)を形成するためのマーカ装置33が備えられている。左右のマーカ装置33は、それぞれ、圃場の田面に接地して走行機体Cの走行に伴い圃場の田面に指標ラインLNを形成する作用姿勢、及び、圃場の田面から上方に離れた格納姿勢に操作自在に構成されている。
図1〜図3に示されるように、走行機体Cの中央部には、各種の運転操作が行われる運転部40が備えられている。運転部40には、運転者が着座可能な運転座席41、操縦塔42、前車輪10の手動の操向操作用のステアリングホイールにより構成される操向ハンドル43、前後進の切り換え操作や走行速度を変更操作が可能な主変速レバー44、操作レバー45等が備えられている。運転座席41は、走行機体Cの中央部に備えられている。操縦塔42に、操向ハンドル43、主変速レバー44、操作レバー45等が操作自在に備えられている。運転部40の足元部位には、搭乗ステップ46が設けられている。搭乗ステップ46の左右の外側位置には、補助ステップ47が設けられている。ボンネット12の左右両側には、搭乗ステップ46に段差なく連なる乗降通路としての乗降ステップ48が設けられている。乗降ステップ48の横外側に、左右の予備苗フレーム30がそれぞれ配置されている。
図2、図3に示される操作レバー45は、操向ハンドル43の下側の右横側に備えられている。詳細な図示はしないが、操作レバー45は中立位置から、上方の上昇位置、下方の下降位置、後方の右マーカ位置、及び、前方の左マーカ位置、の十字方向に操作自在に構成され、中立位置に付勢されている。
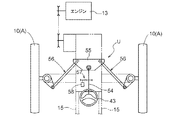
図4に示されるように、操向ユニットUには、上述の操向ハンドル43、操向ハンドル43に連動連結されるステアリング操作軸54、ステアリング操作軸54の回動に伴って揺動するピットマンアーム55、ピットマンアーム55に連動連結される左右の連繋機構56、ステアリングモータ58、ステアリング操作軸54にステアリングモータ58を連動連結するギヤ機構57等が備えられている。
図1〜図3、図5に示されるように、走行機体Cには、衛星測位システムにより位置情報を取得する受信装置63及び主に、走行機体Cの傾き(ピッチ角、ロール角)を検出可能な副慣性計測装置64を有する計測ユニット61と、慣性情報を計測する主慣性計測装置62(「慣性計測装置」に相当)と、が備えられている。
図5に示されるように、走行機体Cには、操向ユニットUの自動操向についての制御を行う制御装置75が備えられている。制御装置75には、情報記憶部76と、ティーチング記憶部77と、旋回検出部78と、開始判定部79と、情報補正部80と、走行機体Cを走行させる目標ラインLMを生成する生成部81と、状態検出部82と、位置情報、及び、慣性情報に基づいて、走行機体Cが目標ラインLMに沿って走行するように、操向ユニットUを制御する制御部83と、が備えられている。
一例として、上面視で四角形の水田において苗の植え付け作業を行う場合について説明する。
図6に示されるように、まず、走行機体Cを圃場内の畦際の或る第一位置Q1に位置させ、登録スイッチ52の第一登録ボタン52A(図5参照)を操作する。そして、苗植付装置Wを上昇させ、且つ、整地フロート25を接地させた状態で、第一位置Q1から側部側の畦際の直線形状に沿って、走行機体Cを直進走行させ、反対側の畦際近くの第二位置Q2まで移動させてから、登録スイッチ52の第二登録ボタン52B(図5参照)を操作する。これにより、第一位置Q1において受信装置63により取得された位置情報と第二位置Q2において受信装置63により取得された位置情報とから、第一位置Q1と第二位置Q2とを結ぶ方向であるティーチング方向TAが生成される。
そして、受信装置63が設置されている位置から、走行機体Cの自機方位NAの方向に所定距離離れた箇所から、ティーチング方向TAと平行な直線状の目標ラインLMが生成される。これとともに、主慣性計測装置62により計測される情報が、受信装置63により取得された自機位置NMの位置情報、及び、受信装置63により取得された自機位置NMの位置情報と直前位置の位置情報に基づいて算出された自機方位NAに基づいて補正される。
また、走行機体Cの自動操向制御中に、自機方位NAとティーチング方向TAとの角度偏差(ズレ角度)があり、自機位置NMと目標ラインLMとの距離偏差(ズレ距離)がない場合、操向ユニットUは、自機方位NAとティーチング方向TAとの角度偏差(ズレ角度)をなくす方向に操向制御される。
また、走行機体Cの自動操向制御中に、自機方位NAとティーチング方向TAとの角度偏差(ズレ角度)があり、自機位置NMと目標ラインLMとの距離偏差(ズレ距離)がある場合には、操向ユニットUは、自機方位NAとティーチング方向TAとの角度偏差(ズレ角度)をなくす方向に操向制御される。
また、走行機体Cの自動操向制御中に、自機方位NAとティーチング方向TAとの角度偏差(ズレ角度)がなく、自機位置NMと目標ラインLMとの距離偏差(ズレ距離)がある場合、操向ユニットUは、自機位置NMと目標ラインLMとの距離偏差(ズレ距離)をなくす方向に操向制御される。
これにより、走行機体Cが、目標ラインLMに沿って正確に走行するものとなる。
図7に示されるように、受信装置63は、走行機体Cの前部に配置されているが、データ処理の基準となる自機位置NMは、受信装置63の実際の設置位置ではなく、主慣性計測装置62の近傍位置に設定されている。データ処理の基準となる自機位置NMの設定は、受信装置63と自機位置NMとする箇所までの距離、及び、受信装置63や主慣性計測装置62に基づいて算出される自機方位NAに基づいて求められるようになっている。目標ラインLMに沿って正確に走行させたいのは、苗植付装置Wであるので、自機位置NMを、このように、苗植付装置Wの近傍に設定することにより、苗植付装置Wが目標ラインLMに沿って正確に走行するように、走行機体Cの自動操向制御が行うことができるものとなる。
図3に示されるように、左右の予備苗フレーム30には、それぞれ、支持支柱フレーム16に固定される固定部85と、固定部85から上向きに延びて左右内側に向けて傾斜する傾斜部86と、傾斜部86から上向きに延びる縦部87と、が備えられている。つまり、予備苗フレーム30の縦部87は、支持支柱フレーム16、及び、予備苗フレーム30の固定部85に対して、左右内側に所定距離Dだけオフセットしている。
以下、本発明の別実施形態について説明する。下記の各別実施形態は、矛盾が生じない限り、複数組み合わせて上記実施形態に適用してもよい。なお、本発明の範囲は、これら実施形態の内容に限定されるものではない。
29 :レール式予備苗台(予備苗台)
30 :予備苗フレーム
31 :連結フレーム
62 :主慣性計測装置(慣性計測装置)
63 :受信装置
66 :ハーネス
67 :コネクタ部
68 :ガード部材
72 :後車軸
73 :後車軸フレーム(取付部材)
81 :生成部
83 :制御部
A :走行装置
C :走行機体
U :操向ユニット
W :苗植付装置(作業装置)
S1 :使用状態
S2 :格納状態
LM :目標ライン
X :左右軸心
Claims (5)
- 走行装置を有する走行機体と、
前記走行装置を操向可能な操向ユニットと、
衛星測位システムにより位置情報を取得する受信装置と、
前記位置情報に基づいて、前記走行機体が目標ラインに沿って走行するように、前記操向ユニットを制御する制御部と、が備えられ、
前記受信装置を支持可能な支持部材が設けられ、
前記支持部材が、使用状態と、前記使用状態よりも低い箇所に前記受信装置を位置させた格納状態と、に状態変更可能に前記受信装置を支持する作業車。 - 前記上下方向に延びる左右一対のフレームの間に、前記受信装置が支持されている請求項1に記載の作業車。
- 左右一対のフレームの上端同士を連結する横フレームを備え、前記横フレームに前記受信装置が支持されている請求項2に記載の作業車。
- 前記使用状態では、前記受信装置の上端部が前記フレームの上端部よりも高い箇所に位置し、
前記格納状態では、使用状態における前記受信装置の上端部が前記フレームの上端部よりも低い箇所に位置する請求項2又は3に記載の作業車。 - 前記受信装置が、左右方向に沿った左右軸心周りに回動可能、且つ、前記使用状態と前記格納状態で位置固定可能に、支持されている請求項1〜4のいずれか一項記載の作業車。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019113832A JP6860619B2 (ja) | 2019-06-19 | 2019-06-19 | 作業車 |
| JP2021053484A JP7174495B2 (ja) | 2019-06-19 | 2021-03-26 | 作業車 |
| JP2022176258A JP7513680B2 (ja) | 2019-06-19 | 2022-11-02 | 作業車 |
| JP2024103821A JP2024124447A (ja) | 2019-06-19 | 2024-06-27 | 作業車 |
| JP2024103822A JP2024124448A (ja) | 2019-06-19 | 2024-06-27 | 作業車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019113832A JP6860619B2 (ja) | 2019-06-19 | 2019-06-19 | 作業車 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019026703A Division JP6546362B2 (ja) | 2019-02-18 | 2019-02-18 | 作業車 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021053484A Division JP7174495B2 (ja) | 2019-06-19 | 2021-03-26 | 作業車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019162149A JP2019162149A (ja) | 2019-09-26 |
| JP6860619B2 true JP6860619B2 (ja) | 2021-04-14 |
Family
ID=68065076
Family Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019113832A Active JP6860619B2 (ja) | 2019-06-19 | 2019-06-19 | 作業車 |
| JP2021053484A Ceased JP7174495B2 (ja) | 2019-06-19 | 2021-03-26 | 作業車 |
| JP2022176258A Active JP7513680B2 (ja) | 2019-06-19 | 2022-11-02 | 作業車 |
| JP2024103822A Pending JP2024124448A (ja) | 2019-06-19 | 2024-06-27 | 作業車 |
| JP2024103821A Pending JP2024124447A (ja) | 2019-06-19 | 2024-06-27 | 作業車 |
Family Applications After (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021053484A Ceased JP7174495B2 (ja) | 2019-06-19 | 2021-03-26 | 作業車 |
| JP2022176258A Active JP7513680B2 (ja) | 2019-06-19 | 2022-11-02 | 作業車 |
| JP2024103822A Pending JP2024124448A (ja) | 2019-06-19 | 2024-06-27 | 作業車 |
| JP2024103821A Pending JP2024124447A (ja) | 2019-06-19 | 2024-06-27 | 作業車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (5) | JP6860619B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6860619B2 (ja) | 2019-06-19 | 2021-04-14 | 株式会社クボタ | 作業車 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5652912U (ja) * | 1979-10-01 | 1981-05-09 | ||
| JPH01109413A (ja) * | 1987-10-22 | 1989-04-26 | Kubota Ltd | 自動走行作業車の操向制御装置 |
| JPH09107717A (ja) * | 1995-10-24 | 1997-04-28 | Kubota Corp | 作業機械の姿勢制御装置 |
| JPH09154308A (ja) * | 1995-12-12 | 1997-06-17 | Kubota Corp | 作業機械の姿勢制御装置 |
| JP3240116B2 (ja) * | 1996-06-24 | 2001-12-17 | 矢崎総業株式会社 | ワイヤハーネスの保持機構 |
| JP2008092818A (ja) * | 2006-10-06 | 2008-04-24 | Yanmar Co Ltd | 農用作業車 |
| EP1967931A3 (en) | 2007-03-06 | 2013-10-30 | Yamaha Hatsudoki Kabushiki Kaisha | Vehicle |
| JP2009028015A (ja) | 2007-07-30 | 2009-02-12 | Yanmar Co Ltd | 農用作業機 |
| JP5580855B2 (ja) | 2012-06-12 | 2014-08-27 | 株式会社ソニー・コンピュータエンタテインメント | 障害物回避装置および障害物回避方法 |
| JP5947626B2 (ja) * | 2012-06-12 | 2016-07-06 | キヤノン株式会社 | 入力表示装置、その制御方法、プログラム、及び印刷装置 |
| JP6860619B2 (ja) | 2019-06-19 | 2021-04-14 | 株式会社クボタ | 作業車 |
-
2019
- 2019-06-19 JP JP2019113832A patent/JP6860619B2/ja active Active
-
2021
- 2021-03-26 JP JP2021053484A patent/JP7174495B2/ja not_active Ceased
-
2022
- 2022-11-02 JP JP2022176258A patent/JP7513680B2/ja active Active
-
2024
- 2024-06-27 JP JP2024103822A patent/JP2024124448A/ja active Pending
- 2024-06-27 JP JP2024103821A patent/JP2024124447A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023009115A (ja) | 2023-01-19 |
| JP7513680B2 (ja) | 2024-07-09 |
| JP2024124448A (ja) | 2024-09-12 |
| JP2021094039A (ja) | 2021-06-24 |
| JP2024124447A (ja) | 2024-09-12 |
| JP7174495B2 (ja) | 2022-11-17 |
| JP2019162149A (ja) | 2019-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7192018B2 (ja) | 作業車 | |
| JP6576237B2 (ja) | 作業車 | |
| JP6643091B2 (ja) | 農作業機 | |
| JP6552420B2 (ja) | 作業車 | |
| JP2023024520A5 (ja) | ||
| JP6811655B2 (ja) | 作業車 | |
| JP7195381B2 (ja) | 走行作業機 | |
| JP7117886B2 (ja) | 作業車 | |
| JP2024124447A (ja) | 作業車 | |
| JP6921934B2 (ja) | 農作業機 | |
| JP6546362B2 (ja) | 作業車 | |
| JP2019050776A (ja) | 作業車両 | |
| JP6900291B2 (ja) | 自動操舵システム | |
| JP6962427B2 (ja) | 作物引抜機 | |
| JP2022082811A (ja) | 作業車両 | |
| JP2021175405A (ja) | 農作業機 | |
| JP6984640B2 (ja) | 作業車両 | |
| JP6669225B2 (ja) | 苗移植機 | |
| JP6858595B2 (ja) | 作業車 | |
| JP7076494B2 (ja) | 作業車 | |
| JP6934510B2 (ja) | 農作業機 | |
| JP6669226B2 (ja) | 苗移植機 | |
| JP7063365B2 (ja) | 作業車両 | |
| JP2020128996A5 (ja) | ||
| JP2019110816A (ja) | 植播系作業機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200728 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200925 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210224 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210326 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6860619 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |