JP6819281B2 - 衝突判定装置、および、衝突判定システム - Google Patents
衝突判定装置、および、衝突判定システム Download PDFInfo
- Publication number
- JP6819281B2 JP6819281B2 JP2016252476A JP2016252476A JP6819281B2 JP 6819281 B2 JP6819281 B2 JP 6819281B2 JP 2016252476 A JP2016252476 A JP 2016252476A JP 2016252476 A JP2016252476 A JP 2016252476A JP 6819281 B2 JP6819281 B2 JP 6819281B2
- Authority
- JP
- Japan
- Prior art keywords
- collision
- vehicle
- target
- angle
- possibility
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 16
- 238000000034 method Methods 0.000 claims description 65
- 238000012545 processing Methods 0.000 claims description 28
- 238000004364 calculation method Methods 0.000 claims description 17
- 238000003384 imaging method Methods 0.000 claims description 5
- 239000013256 coordination polymer Substances 0.000 description 69
- 238000012937 correction Methods 0.000 description 53
- 238000012986 modification Methods 0.000 description 8
- 230000004048 modification Effects 0.000 description 8
- 230000005540 biological transmission Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images














Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/60—Traffic rules, e.g. speed limits or right of way
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
Description
図1及び図2に基づき、車載システム10の構成を説明する。自車両30に搭載される車載システム10は、センサ部11と、ECU20とを備える。センサ部11とECU20とは車内ネットワーク(図示せず)により接続している。車載システム10は、衝突判定装置、衝突回避装置、および、衝突回避システムとして機能する。車載システム10は、自車両30の周囲のうちで予め定められた判定領域において自車両30と物標との衝突可能性を判定する。
図7、図9〜図11を用いて、車載システム10が所定時間ごとに繰り返し実行する第2実施形態の衝突判定処理について説明する。第1実施形態と第2実施形態との異なる点は、第2実施形態の記憶部29aが変化可能性テーブル290を有していない点と、判定テーブル291aの内容と、衝突判定処理の内容である。その他の構成については第1実施形態と同様の構成を備えるので説明を適宜省略する。
上記第1実施形態または第2実施形態において、衝突判定部24は他の要素によって衝突可能性CPを補正してもよい。以下に衝突可能性CPの補正処理について説明する。
上記第2実施形態において、衝突判定部24は、角度θ2の経時的な変化量ABを算出し、ステップS12a(図10)の後に変化量ABに応じて衝突可能性CPを補正してもよい。衝突判定部24が第1の補正処理を実行する場合には、記憶部29aには、図12に示す第1変化量テーブル296が記憶されている。第1変化量テーブル296は、変化量ABと補正値CVaとを対応付けたテーブルである。補正値CVaは、ステップS12a(図10)で判定された衝突可能性CPに加算される値である。つまり、補正値CVaが「−1」である場合、ステップS12aで判定された衝突可能性CPの数値が1つ低くなる。なお、補正後の衝突可能性CPがゼロまたは負の値になる場合は、最低値である「1」に衝突可能性CPが設定されてもよい。物標35が自車両30との衝突を回避するために意図的に移動方向DR2を変化させていると推定できる変化量ABである場合に、補正値CVaは負の値に設定されている。具体的には、変化量ABが10度以上の場合に補正値CVaが「−1」に設定され、変化量ABが10度未満の場合に補正値CVaが「0」に設定されている。
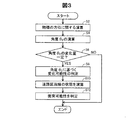
上記第1,第2実施形態において、衝突判定部24は、角度θ0の経時的な変化量ACを算出し、ステップS12やステップS12a(図3,図10)の後に変化量ACに応じて衝突可能性CPを補正してもよい。第2の補正処理は、ステップS6が省略される場合に実行されることが好ましい。衝突判定部24が第2の補正処理を実行する場合には、記憶部29,29aには、図13に示す第2変化量テーブル297が記憶されている。第2変化量テーブル297は、変化量ACと補正値CVbとを対応付けたテーブルである。補正値CVbは、ステップS12(図3)やステップS12a(図10)で判定された衝突可能性CPに加算される値である。つまり、補正値CVbが「−1」である場合、ステップS12,S12aで判定された衝突可能性CPの数値が1つ低くなる。なお、補正後の衝突可能性CPがゼロまたは負の値になる場合は、最低値である「1」に衝突可能性CPが設定されてもよい。補正値CVbは、物標35が自車両30との衝突を回避するために意図的に移動方向DR2が変化していると推定できる変化量ACである場合に、負の値に設定されている。具体的には、変化量ACが10度以上の場合に補正値CVbが「−1」に設定され、変化量ACが10度未満の場合に補正値CVbが「0」に設定されている。
上記第1,第2実施形態において、衝突判定部24は、道路区画線CLの種類を判定し、道路区画線CLの種類に応じて衝突可能性CPを補正してもよい。衝突判定部24が第3の補正処理を実行する場合には、記憶部29,29aには、図14に示す区画線補正テーブル298が記憶されている。区画線補正テーブル298は、道路区画線CLの種類と補正値CVcとを対応付けたテーブルである。補正値CVcは、ステップS12(図3)やステップS12a(図10)で判定された衝突可能性CPに加算される値である。つまり、補正値CVcが「−1」である場合、ステップS12,S12aで判定された衝突可能性CPの数値が1つ低くなり、補正値CVcが「1」である場合、ステップS12,S12aで判定された衝突可能性CPの数値が1つ高くなる。なお、補正後の衝突可能性CPがゼロまたは負の値になる場合は、最低値である「1」に衝突可能性CPが設定され、補正後の衝突可能性CPが「10」を超える場合は、最高値である「10」に衝突可能性CPが設定されてもよい。
D−1.第1変形例:
上記各実施形態では、自車両30と物標35との衝突可能性CPを判定する判定領域は一定の領域であったが、これに限定されるものではない。例えば、衝突判定部24が判定した衝突可能性CPが低いほど、次回の衝突可能性の判定に用いる判定領域を小さくしてもよい。例えば、記憶部29,29aには、図15に概念的に示すように、衝突判定部24が前回の衝突判定処理で判定した衝突可能性CPの数値と、次回の衝突判定処理で用いる判定領域R1〜R10とが対応付けて記憶されている。判定領域R1〜R10は、自車両30の幅方向の座標と鉛直方向の座標の2次元の座標によって規定されている。ECU20は、前回の衝突可能性CPが低いほど、衝突可能性CPと判定領域とを定めた記憶部29,29aのデータを参照して、次回の衝突判定処理で用いる判定領域を小さく設定する。本変形例では、衝突可能性CPが低いほど、判定領域の左右方向(自車両30の幅方向)の大きさを小さくする。こうすることで、自車両30と物標35との衝突可能性CPが低い場合は衝突判定のためのデータ量を少なくできるので、車載システム10の処理負荷を低減できる。
上記各実施形態では、車載システム10が実行する衝突可能性CPの判定および衝突回避処理について、自車両30の前方を走行する対向車線上の物標35を例に説明したが、これに限定されるものではない。例えば、同じ方向に移動するための隣り合う車線のうちで一方の車線に自車両30が位置し、自車両30より前方かつ他方の車線に物標35が位置する場合においても、衝突可能性の判定および衝突回避処理が実行されていもよい。また例えば、自車両30が走行する車線に合流する車線上であって、かつ、物標35が自車両30の前方を走行する場合においても、衝突可能性の判定および衝突回避処理が実行されてもよい。
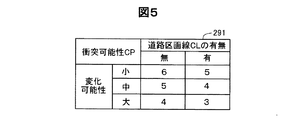
上記第1実施形態と上記第2実施形態とを組み合わせて、衝突判定部24は衝突判定処理を行ってもよい。具体的には、衝突判定部24は、判定テーブル291(図5)を用いて衝突可能性CPを判定する。そして、第2実施形態の判定テーブル291aにおいて、衝突可能性CPの代わりに補正値CVdが入力された図16に示す補正テーブル291dを用いて、衝突可能性CPに補正値CVdを加算することで衝突可能性CPを補正する。また、衝突判定部24は、上記第1実施形態と上記第2実施形態の衝突判定処理と、上記の第1〜第3の補正処理の少なくともいずれかを組み合わせて衝突可能性CPを判定してもよい。
Claims (9)
- 自車両(30)の周囲のうちで予め定めた判定領域において前記自車両と物標(35)との衝突可能性を判定する衝突判定装置(10)であって、
前記自車両を基準とする物標の方位を検出する方位検出部(21)と、
前記自車両の周囲を撮像する画像センサ(14)と、
前記自車両の移動方向と前記物標の移動方向とが成す角度θ0を算出する角度算出部(23)と、
前記画像センサから取得した撮像データを用いて道路区画線(CL)の状態を演算し、前記角度θ0と前記道路区画線の演算結果とに基づいて、前記自車両と前記物標との衝突可能性を判定する衝突判定部(24)と、を備え、
前記衝突判定部は、
前記自車両の脇に位置する第1道路区画線の接線方向のうちで、前記自車両の移動方向(DR1)を向く自車両接線方向(DL1)と、前記物標の脇に位置する第2道路区画線の接線方向のうちで、前記物標の移動方向(DR2)を向く物標接線方向(DL2)との成す角度θ1を算出し、
前記角度θ0と前記角度θ1との差の絶対値である角度差D1が第1角度差の場合に、前記第1角度差よりも大きい第2角度差の場合に比べ、前記衝突可能性を低く判定し、
前記第1道路区画線は、前記自車両の前端両側のいずれかに位置する道路区画線のうちで前記自車両の前記前端に最も近い部分であり、
前記第2道路区画線は、前記物標の前端両側のいずれかに位置する道路区画線のうちで前記物標の前記前端に最も近い部分である、衝突判定装置。 - 前記衝突判定部は、前記角度θ0が同じ場合において、前記自車両と前記物標との間に前記道路区画線が位置する場合において、前記自車両と前記物標との間に前記道路区画線が位置しない場合に比べ、前記衝突可能性を低く判定する、請求項1に記載の衝突判定装置。
- 前記衝突判定部は、
前記自車両と前記物標との間に前記道路区画線が位置し、かつ、前記角度差D1が同じ値の場合において、前記物標の移動方向と前記物標接線方向との成す角度θ2の絶対値が第1の値の場合に、前記第1の値よりも大きい第2の値の場合に比べ、前記衝突可能性を低く判定する、請求項1または請求項2に記載の衝突判定装置。 - 前記衝突判定部は、前記角度θ2の経時的な変化量ABが第1変化量の場合に、前記第1変化量よりも小さい第2変化量の場合に比べ、前記衝突可能性を低く判定する、請求項3に記載の衝突判定装置。
- 前記衝突判定部は、前記角度θ0の経時的な変化量ACが第1角度変化量の場合に、前記第1角度変化量よりも小さい第2角度変化量の場合に比べ、前記衝突可能性を低く判定する、請求項1から請求項4までのいずれか一項に記載の衝突判定装置。
- 前記衝突判定部は、前記自車両と前記物標との間に前記道路区画線が位置する場合において、前記自車両と前記物標との間に位置する前記道路区画線が進路変更の禁止を示す場合に、前記自車両と前記物標との間に位置する前記道路区画線が進路変更の禁止を示さない場合に比べ、前記衝突可能性を低く判定する、請求項1から請求項5までのいずれか一項に記載の衝突判定装置。
- 前記衝突判定部が判定した前記衝突可能性が低いほど、次回の前記衝突可能性の判定に用いる前記判定領域を小さくする、請求項1から請求項6までのいずれか一項に記載の衝突判定装置。
- 請求項1から請求項7までのいずれか一項に記載の衝突判定装置と、
前記衝突判定装置が判定した前記衝突可能性が低いほど、衝突回避処理の程度を低くする衝突回避装置と、を備える衝突回避システム。 - 前記衝突回避装置は、前記衝突可能性が低いほど、少なくとも前記衝突回避処理を実行する時期を遅くすることで前記衝突回避処理の程度を低くする、請求項8に記載の衝突回避システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016252476A JP6819281B2 (ja) | 2016-12-27 | 2016-12-27 | 衝突判定装置、および、衝突判定システム |
| US15/855,865 US10850729B2 (en) | 2016-12-27 | 2017-12-27 | Collision determination device and collision determination system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016252476A JP6819281B2 (ja) | 2016-12-27 | 2016-12-27 | 衝突判定装置、および、衝突判定システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018106442A JP2018106442A (ja) | 2018-07-05 |
| JP6819281B2 true JP6819281B2 (ja) | 2021-01-27 |
Family
ID=62625931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016252476A Active JP6819281B2 (ja) | 2016-12-27 | 2016-12-27 | 衝突判定装置、および、衝突判定システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10850729B2 (ja) |
| JP (1) | JP6819281B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10814913B2 (en) | 2017-04-12 | 2020-10-27 | Toyota Jidosha Kabushiki Kaisha | Lane change assist apparatus for vehicle |
| JP6627821B2 (ja) * | 2017-06-06 | 2020-01-08 | トヨタ自動車株式会社 | 車線変更支援装置 |
| JP6642522B2 (ja) * | 2017-06-06 | 2020-02-05 | トヨタ自動車株式会社 | 車線変更支援装置 |
| JP6627822B2 (ja) | 2017-06-06 | 2020-01-08 | トヨタ自動車株式会社 | 車線変更支援装置 |
| JP6760204B2 (ja) * | 2017-06-06 | 2020-09-23 | トヨタ自動車株式会社 | 操舵支援装置 |
| JP6897349B2 (ja) * | 2017-06-09 | 2021-06-30 | トヨタ自動車株式会社 | 運転支援装置 |
| EP3413083B1 (en) * | 2017-06-09 | 2020-03-11 | Veoneer Sweden AB | A vehicle system for detection of oncoming vehicles |
| WO2019163493A1 (ja) * | 2018-02-20 | 2019-08-29 | 日立オートモティブシステムズ株式会社 | 撮像装置 |
| DE102019107411A1 (de) * | 2019-03-22 | 2020-09-24 | Zf Active Safety Gmbh | Steuerungssystem und Steuerungsverfahren zur Pfadzuordnung von Verkehrsobjekten |
| JP7541497B2 (ja) | 2021-09-29 | 2024-08-28 | 本田技研工業株式会社 | 車両制御装置、情報処理装置、それらの動作方法及びプログラム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004136788A (ja) * | 2002-10-17 | 2004-05-13 | Toyota Motor Corp | 車両用制御装置 |
| JP4706654B2 (ja) * | 2007-03-27 | 2011-06-22 | トヨタ自動車株式会社 | 衝突回避装置 |
| JP5038986B2 (ja) * | 2008-07-04 | 2012-10-03 | トヨタ自動車株式会社 | 衝突予測装置 |
| JP5614055B2 (ja) * | 2010-02-22 | 2014-10-29 | トヨタ自動車株式会社 | 運転支援装置 |
| JP5656732B2 (ja) * | 2011-05-02 | 2015-01-21 | 株式会社デンソー | 衝突確率演算装置、および衝突確率演算プログラム |
| JP5846109B2 (ja) | 2012-11-20 | 2016-01-20 | 株式会社デンソー | 衝突判定装置及び衝突回避システム |
| JP6022983B2 (ja) * | 2013-03-29 | 2016-11-09 | 株式会社日本自動車部品総合研究所 | 運転支援装置 |
| JP6442904B2 (ja) | 2014-08-01 | 2018-12-26 | 株式会社デンソー | 運転支援装置 |
| JP6387948B2 (ja) * | 2015-12-11 | 2018-09-12 | トヨタ自動車株式会社 | 車両の運転支援装置 |
| DE102016000943B4 (de) * | 2016-01-28 | 2023-09-07 | Zf Automotive Germany Gmbh | Steuerungssystem und Steuerungsverfahren zum Ermitteln einer Wahrscheinlichkeit einer bevorstehenden Kollision eines Fahrzeugs |
| JP6673178B2 (ja) * | 2016-12-14 | 2020-03-25 | 株式会社デンソー | 車両制御装置、車両制御方法 |
-
2016
- 2016-12-27 JP JP2016252476A patent/JP6819281B2/ja active Active
-
2017
- 2017-12-27 US US15/855,865 patent/US10850729B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018106442A (ja) | 2018-07-05 |
| US10850729B2 (en) | 2020-12-01 |
| US20180178790A1 (en) | 2018-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6819281B2 (ja) | 衝突判定装置、および、衝突判定システム | |
| US9150223B2 (en) | Collision mitigation apparatus | |
| JP6462630B2 (ja) | 物標検出装置 | |
| JP5892129B2 (ja) | 道路形状認識方法、道路形状認識装置、プログラムおよび記録媒体 | |
| JP5846109B2 (ja) | 衝突判定装置及び衝突回避システム | |
| US9650040B2 (en) | Collision mitigation apparatus | |
| JP5737306B2 (ja) | 露出制御装置 | |
| JP5870908B2 (ja) | 車両の衝突判定装置 | |
| JP5862785B2 (ja) | 衝突判定装置及び衝突判定方法 | |
| JP6787157B2 (ja) | 車両制御装置 | |
| JP6729282B2 (ja) | 車両制御装置 | |
| JP6988200B2 (ja) | 車両制御装置 | |
| CN104176053B (zh) | 碰撞缓解设备 | |
| US20160019429A1 (en) | Image processing apparatus, solid object detection method, solid object detection program, and moving object control system | |
| US10192444B2 (en) | Forward collision warning system and method | |
| JP2007300181A (ja) | 周辺認識装置、周辺認識方法、プログラム | |
| JP6011625B2 (ja) | 速度算出装置及び速度算出方法並びに衝突判定装置 | |
| JP6936098B2 (ja) | 対象物推定装置 | |
| WO2016117507A1 (ja) | 区画線認識装置 | |
| JP2010107447A (ja) | 道路形状推定装置 | |
| JP2013161190A (ja) | 物体認識装置 | |
| WO2016158491A1 (ja) | 衝突回避支援装置 | |
| JP6044084B2 (ja) | 移動物体位置姿勢推定装置及び方法 | |
| JP2019067115A (ja) | 路面検出装置 | |
| JP2015215299A (ja) | 対象物位置推定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190315 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200403 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200714 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200831 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201201 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201214 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6819281 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |