JP6813162B2 - モアレ法による高速変位・ひずみ分布測定方法及び測定装置 - Google Patents
モアレ法による高速変位・ひずみ分布測定方法及び測定装置 Download PDFInfo
- Publication number
- JP6813162B2 JP6813162B2 JP2016028169A JP2016028169A JP6813162B2 JP 6813162 B2 JP6813162 B2 JP 6813162B2 JP 2016028169 A JP2016028169 A JP 2016028169A JP 2016028169 A JP2016028169 A JP 2016028169A JP 6813162 B2 JP6813162 B2 JP 6813162B2
- Authority
- JP
- Japan
- Prior art keywords
- scanning
- sample
- moire
- pitch
- displacement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 140
- 238000006073 displacement reaction Methods 0.000 title claims description 71
- 238000000691 measurement method Methods 0.000 title description 5
- 238000005259 measurement Methods 0.000 claims description 49
- 238000005070 sampling Methods 0.000 claims description 29
- 238000012545 processing Methods 0.000 claims description 21
- 238000000926 separation method Methods 0.000 claims description 3
- 238000003384 imaging method Methods 0.000 claims 3
- 230000035772 mutation Effects 0.000 claims 1
- 239000000523 sample Substances 0.000 description 92
- 239000011295 pitch Substances 0.000 description 49
- 239000000463 material Substances 0.000 description 13
- 230000035945 sensitivity Effects 0.000 description 11
- 238000011156 evaluation Methods 0.000 description 8
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 6
- 229910052710 silicon Inorganic materials 0.000 description 6
- 239000010703 silicon Substances 0.000 description 6
- 238000004088 simulation Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 238000012795 verification Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 230000000052 comparative effect Effects 0.000 description 3
- 238000002474 experimental method Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000001127 nanoimprint lithography Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 230000002457 bidirectional effect Effects 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 230000001066 destructive effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 229910044991 metal oxide Inorganic materials 0.000 description 2
- 150000004706 metal oxides Chemical class 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 229960000074 biopharmaceutical Drugs 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000004100 electronic packaging Methods 0.000 description 1
- 239000010408 film Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 239000002648 laminated material Substances 0.000 description 1
- 230000006386 memory function Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002905 metal composite material Substances 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 238000001000 micrograph Methods 0.000 description 1
- VIKNJXKGJWUCNN-XGXHKTLJSA-N norethisterone Chemical compound O=C1CC[C@@H]2[C@H]3CC[C@](C)([C@](CC4)(O)C#C)[C@@H]4[C@@H]3CCC2=C1 VIKNJXKGJWUCNN-XGXHKTLJSA-N 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 238000013001 point bending Methods 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
- 239000002990 reinforced plastic Substances 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000009864 tensile test Methods 0.000 description 1
- 230000036962 time dependent Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images

















Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
- Microscoopes, Condenser (AREA)
Description
モアレ画像取得に時間がかかると、変位ひずみ分布評価に必要なモアレパターンが試料クリープの影響を受けやすく、測定誤差が発生しやすい。
特に、一般的にレーザ走査型顕微鏡(LSM)装置で用いられる対物レンズの倍率は通常5×、10×、20×、50×、100×、150×といった具合に不連続であり、LSMモアレ法を様々なアプリケーションへ応用する際の障害となる。
回転前後のモアレ縞を得るために、顕微鏡は二回で走査する必要がある。
回転プロセスや二回走査が不便であり、試料の位置誤差をもたらすことになる。
この場合、時間依存現象を捉えるための動的変形測定を適用することは困難である。
また、実用上では使用可能な試料格子ピッチの範囲を拡大できる手法が望まれている。
第1の方法は、図1(b)右上に示す高速走査モアレ法であり、第2の方法は図1(c)左下に示す二次元走査モアレ法であり、第三の方法は図1(d)右下に示した高速二次元走査モアレ法である。
なお、ここでは、走査モアレは回転ミラーなどで機械的にレーザ光源等を走査して得られる各走査点での輝度情報を取得するのに対して、サンプリングモアレ法はCCD面に配置された二次元画素配列を飛び飛び(間引き)の画素での明るさ情報をサンプリング点として取り出しているという点では異なるものの、離散的にサンプリング点での輝度情報を取得している点は本質的に同じである。
よって本説明で走査モアレ法と言う時には、図面を含めて、走査モアレ法とサンプリングモアレ法に共通な特徴が含まれるものとする。
高速縞走査とは従前の変形計測の縞走査方法に要する時間よりも走査時間の短縮を意味する。
より詳しくは従前の半分以下の走査線数で同等の精度の変形計測ができる。
その後、試料台上に設置した試料をレーザ走査型顕微鏡(LSM)や走査型電子顕微鏡(SEM)または原子間力顕微鏡(AFM)などの走査型顕微鏡より観察する。
走査線(試料格子ピッチの整数倍)と試料格子間の干渉から、高速走査モアレパターンが生成することができる(図2)。
この場合、従来の走査モアレ法に比べて走査線数が少ないため、より高速でモアレ画像を取得できる。
初めに従前の走査モアレ縞の形成原理を紹介する。
従前のモアレ縞は試料の格子と走査線(参照格子)間の干渉から発生する。
試料格子のピッチと走査線の間隔がそれぞれy方向にpとT0として定義されている場合、試料格子と走査線の位相表現はそれぞれ2πy/p、2πy/T0と表せる。
y方向は走査線の方向に対して垂直である。
1次モアレ縞の位相は次式で表現できる。

場合によっては、走査線間隔が試料格子ピッチに近接している条件を満足するのは容易でない。
高速走査は走査解像度を落として走査線間隔を大きく走査する事で実現される。
高速走査線間隔は次の式で定義される。
そうすると高速走査モアレ縞は次式で表される。
モアレ縞はおおよそ周期的分布状態であるので高速走査モアレ縞のモアレ間隔は次式で表される。
数式(3)と(4)のモアレ位相の基本周波数要素を比較すれば、次式に示す試料格子ピッチと高速走査線間隔と高速走査モアレ間隔の相関を得ることができる。
よって次の2つの数式が得られる。
モアレ縞次数をmとして、基本走査線に関してy方向におけるモアレ縞の変位は次式で表される。
試料格子の実際のひずみは試料格子ピッチ(または基本走査間隔)の変形前後の幾何学的関係から得られる。
実際のひずみは次式によって与えられる。
高速走査モアレ法ではT0間隔の基本走査線に相対的なピッチpの試料格子のひずみは式、ε(n)=(p−T0)/T0で表される。
この数式と数式(7)とを比較すれば、T(n)<npの場合には式、ε(n)=T0/(d−T0)で得られ、T(n)>npの場合には式、ε(n)=−T0/(d+T0)で得られる。
モアレ間隔は通常y方向には基本走査線間隔よりはるかに大きいことから相対ひずみは式、|ε(n)|≒T0/d=T(n)/(nd)で簡素化される。
数式(8)から提案法の変位感度は縞模様につきT(n)/nであり、従来の走査モアレ法の縞模様あたりの変位感度と同じである。
ひずみ感度は測定可能な最小のひずみ、すなわち全視野で2個のモアレ縞のみ観測される場合のひずみ、d=N(n)T(n)と定義される。ただしN(n)は走査線数とする。
T0がpに近接している場合の基本走査線数をN0とすれば全視野ではd=N0T0となるので、ひずみ感度は、T(n)/[nN0T0]=1/N0となって、結局従来のモアレ法の感度と同じになることがわかる。
公知の位相シフト法と組み合わせることにより変形計測精度を改善する事ができる。
よって高速走査モアレ法は、変位とひずみの測定感度を低下させることなく、高い速度でモアレ画像を取得できることから、従来の走査モアレ法より、試料のクリープを受けにくい。
また変形計測のためにより多くのピッチの試料格子に適用することができる。
二次元走査モアレ法は、単一の二次元走査モアレ画像から、二方向の変形が同時に測定できることを示している。
走査点と交差格子間との干渉から、二次元走査モアレ縞が生成する(図3)。
走査顕微鏡の走査プロセスでは並行走査線が知られている。
実際のところ、図3に示すように、走査型顕微鏡では走査線は多くの走査点から構成されている。
図4に示すように、二次元走査モアレ縞は2つの従来の一次元走査モアレ縞を二方向に合成したものと考えてよい。
フーリエ変換と逆フーリエ変換を用いて図4に示すように二次元走査モアレ縞をx方向とy方向の一次元走査モアレ縞に分離することができる。
交差格子の二方向における走査点に相対的な変位は次式で表すことができる。
走査点に対する試料格子のひずみ、すなわち、二方向の相対ひずみは、それぞれ、二方向での相対変位の一次微分から得ることができる。
試料格子の実際のひずみは、変形前後の試料格子ピッチや走査点間隔との幾何学的関係(関数)から求めることができる。
試料格子の実際の二方向ひずみは次式による。
相対ひずみが最初に計測されるのは試料格子を観測することなく走査モアレが低倍率で記録されるので全視野が顕著に拡大できることによる。
より小さな格子を用いれば、より高精細な変位・ひずみ分布が得られる。
本発明は主にx方向とy方向の通常ひずみの測定に焦点をあてている。
従って、この方法は、二次元変形計測のために、簡単な操作、節約の時間、および高精度の利点を有する。
高速二次元走査モアレ法は、高速走査モアレ法と二次元走査モアレ法を融合する方法である。最初に、試料表面上に規則的な交差格子を作製する。
その後で、試料を走査型顕微鏡の試料台上に載置する。
高速走査点と試料交差格子間の干渉は、高速二次元走査モアレ縞を生成する。
高速二次元走査モアレ縞は高速走査点と交差格子間の干渉で生成する。
y方向の走査点間隔は基本走査点間隔の2倍以上、かつ、x方向の間隔は基本走査点間隔と等しいまたはその倍数、Ti(ni)=ni T0、ny≧2, nx≧1,である。
ただしT0は試料格子ピッチに近接する基本走査点間隔とし、iはx方向またはy方向とする。
基本走査点に相対する二方向の試料格子変位は次式で表される。
走査点に対する試料格子のひずみ、すなわち、二方向の相対ひずみは、それぞれ、二方向での相対変位の一次微分から得ることができる。
試料格子の実際の二方向ひずみは次式による。
解析手順は3つの走査モアレ法に共通であり、(ステップ1)まず試料表面に格子を作製し、(ステップ2)いずれかのモアレ画像を取得する。
これらの方法は、様々な材料や構造の広視野や全視野での非破壊ミクロン/ナノスケールの変形を測定することができる。
本発明で述べたこれらの走査モアレ法は、走査線または走査点から、デジタル格子または、電荷結合素子(CCD)カメラ又は相補型金属酸化膜半導体(CMOS)カメラの画素に変更することにより、ミリメートル/メートルスケールの変形を測定するために拡張することができる。
図8に示す提案した高速CCD又はCMOSカメラを使用して、高速サンプリングモアレ法よりミリメートル/メートルスケールの変形を迅速に測定することができる。
効果1:高速走査モアレ法と高速二次元走査モアレ法で、モアレ画像取得速度が高く、使用可能な試料格子ピッチの範囲が広い。
高速変形測定は、計測感度を低下させることなく、変位ひずみ分布を計測できる。
試料クリープの影響を受けにくく、動的測定に適している。
効果2:二次元走査モアレ法と高速二次元走査モアレ法で、二次元変形測定精度は高い。
試料または走査方向の回転動作および2回の走査を必要としないため、回転による誤差がなく、二方向の変形を同時に測定することができる。
また実験操作は簡単で、簡易に動的計測に利用できる。
効果3:開発したこれらの3つの走査モアレ法で、広視野での変位とひずみ分布を非破壊かつ定量的に測定することができる。
格子そのものを観察するではなく、拡大現象であるモアレ縞から変位ひずみ分布を評価しているため、試料格子ピッチの千倍以上の視野を観察できる。
本実施例では、本発明による高速走査モアレ縞の生成方法、及び従来の走査モアレ縞との関係を示す。
図9は、異なる走査解像度または走査間隔でダウンサンプリングした場合に得られるモアレ縞を示している。
これに対して、図9(b)に示すように基本的な走査線間隔T0を12画素として、格子試料とT0=12画素を有する走査格子の重ね合わせから、従来の走査モアレ縞を生成できる。
従って、以降はサンプリングモアレを試料格子と走査線の干渉より得られる重畳モアレと走査モアレの代わりに、異なる走査解像度の場合の比較として使用した。
すなわち、走査線間隔T(n)は基本的な走査線間隔T0のn倍であれば、モアレ縞の間隔は変わらないことを意味する。
しかし、シミュレーション及び実際の実験では、画像のヒストグラムを調整することで、モアレ縞画像のコントラストを高くすることができる。
本シミュレーション結果から、従来の走査モアレ法で得られるモアレ縞の間隔と、高速走査モアレ法で得られるモアレ縞の間隔が変わらないことを確認できる。
図10にUVナノインプリントリソグラフィよりシリコンウェハ上に作製した0.79μmのピッチを有する交差格子を示す。
レーザ走査顕微鏡を用いた顕微鏡画像を撮影する際に、y方向に走査線数を1024、512及び256ラインに変更することができる。
従って、試料格子ピッチ0.79μmと走査線間隔0.726μmの干渉から、図9(a)に示すように従来の走査モアレ縞画像を生成できる。
この場合、試料格子ピッチ0.79μmの倍である1.58μmと走査線間隔1.452μmの干渉から、図11(b)に示すように低解像度走査モアレ縞画像が得られる。
図11(c)と図11(d)から、高速走査モアレ縞と従来の走査モアレ縞のピッチ間隔は同じであり、モアレ縞の輝度値分布もほぼ同じであることを確認できる。
この実施例では、従来の走査モアレ法と比較することで、本発明である第1手法の高速走査モアレ法の変形測定精度を確認する。
半微分ステップの値が10である場合、図11(c)に示すT(1)=0.726 μmで得られたモアレ縞画像から算出した変位分布とひずみ分布をそれぞれ図12(a)と図12(b)にプロットした。
基本的な走査線(T0=0.726μm)に対して、異なる半微分ステップにおける、図13(a)に示すT(1)=0.726μmから得られた平均ひずみ値は0.08992であり、T(2)=1.452μmから得られた平均ひずみ値は0.08981である。
これらの変位分布とひずみ分布間のわずかな差異は、主に画像撮影時に発生した振動と外部ノイズに起因するものと考えられる。
この実施例では、レーザ走査型顕微鏡で二次元走査モアレ縞と高速二次元走査モアレ縞の生成結果を示している。
先に実施例1と同様に、UVナノインプリントリソグラフィによって、シリコンウェハ上に0.79μmのピッチを有する交差格子(図10と同じ)を作製した。
このとき使用したナノインプリントのレジストはPAK01であった。
y方向の走査点数を512に設定した。
対物レンズの倍率は20倍であるときに、y方向の走査点間隔は試料格子ピッチ(T 0 <P)より少し小さい0.726μmであった。
x方向の走査点間隔は、y方向の走査点の間隔に等しい。
x方向の走査点間隔はまだ0.726μmのままである。
この場合、走査速度は、従来の走査速度より2倍高い。
そのモアレ縞のピッチ間隔は従来の走査モアレ法と変わらない。
この実施例では、従来の走査モアレ法と比較して、本発明である第2手法の二次元走査モアレ法と、本発明である第3手法の高速二次元走査モアレ法の変形測定精度を確認する。
二次元走査モアレ法による相対変形を測定するため、図14(a)中の正方形領域を評価した。
フーリエ変換と逆フーリエ変換の画像処理を用いて適切な周波数分離処理を施すことで、図15(a)の二次元モアレパターンをそれぞれ、x方向の一次元モアレ縞画像(図15(b))とy方向の一次元モアレ縞画像(図15(c))に分離することができる。
なお、図15(a)と図16(a)の領域は同じである。
フーリエ変換と逆フーリエ変換の画像処理を用いて適切な周波数分離処理を施すことで、図16(a)の二次元モアレパターンをそれぞれ、x方向の一次元モアレ縞画像(図16(b))とy方向の一次元モアレ縞画像(図16(c))に分離することができる。
式(12)を用いて、これら2つの方向の走査点に対して試料格子のひずみを算出できる。
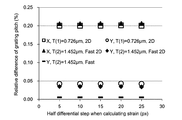
図17に二次元走査モアレ法と高速二次元走査モアレ法より算出した相対ひずみの平均値を示す。
x方向の相対ひずみは0.091であり、y方向の相対ひずみは0.090である。
両方が従来の走査モアレ法から得られたひずみ値である0.090とよく一致している。
ここで測定した試料格子ピッチは、x方向では0.792μmであり、y方向では0.791μmである。
x方向とy方向にピッチの差はわずか1nmのみであることから高精度な測定が実現できているといえる。
図18に示すとおり、算出した試料格子ピッチの相対差はx方向では0.2%であり、y方向では0.05%である。
高速二次元走査モアレ法は、高速と簡便な二次元変形測定の両方の利点を有する。
図8は提案した高速CCD又はCMOSカメラ装置の概略図である
CCD/CMOS検出装置(イメージセンサ)を用い、縦横に整列した基本撮像素子間隔の縦または横、または縦横の各整数倍の撮像素子列に記録し、記録された輝度情報を取り出して、実施例1乃至実施例4に示したように、モアレ縞画像処理すればよい。
こうすると、画像処理の高速化を図る事ができる。
好適には、強化プラスチック、金属複合材料、セラミック複合材料、積層材料、フィルム/基板構造、パッケージ構造、などの金属、ポリマー、セラミック、半導体、複合材料及び構造を含む各種材料の変形を解析するのに適している。
特に以下の3つの材料評価に有効である。
1.亀裂発生、亀裂伝播および損傷挙動の評価
2.界面最適設計のための界面接合性能の評価
3.機械特性、残留応力および構造物の健全性評価
2,3,4,5 参照格子
6 走査線・サンプリング列
7 公知の走査モアレ縞・公知のサンプリングモアレ縞
8 高速走査線・高速サンプリング列
9 高速走査モアレ縞・高速サンプリングモアレ縞
10 走査点・サンプリング点
11 主方向がx方向の走査線・サンプリング列
12 主方向がy方向の走査線・サンプリング列
13 顕微鏡(走査型レーザ顕微鏡、走査型電子顕微鏡、走査型プローブ顕微鏡など)
14 機械荷重(引張、圧縮、3点曲げ)
15 並進・回転荷重
16 熱負荷
17 電気負荷
18 CCD/CMOS検出装置(イメージセンサ)
19 対物レンズ
20 公知の記録モード
21 高速一次元モアレ縞記録モード
22 高速二次元モアレ縞記録モード
Claims (11)
- 縦横の走査点からなり基本走査線間隔T0の整数倍の間隔(整数は1以上)に走査し得る走査線を有する走査型顕微鏡を備え、
試料台に載置されその表面に一方向にピッチp(pはT0に近接する)の規則格子が生成された試料の表面を前記走査型顕微鏡の走査線により走査して前記試料の表面のモアレ縞画像を取得し、
取得した前記モアレ縞画像の走査点の輝度情報から前記試料の変位ひずみ量を計算し、
計算した前記試料の変位ひずみ量を表示する、
走査モアレ方法による変位ひずみ分布測定システムであって、
前記走査型顕微鏡の走査線間隔T(n)を前記ピッチpのn倍(nは2以上の整数)の近傍であるnT 0 とし前記規則格子と前記走査点が不一致またはずれが生じるようにしたことを特徴とする、変位ひずみ分布測定システム。 - 前記規則格子のピッチpの相対的ひずみ量ε(n)は、前記一方向の変位u(n)(下記の式(8))の一次微分(下記の式(9))から得られ、
- ひずみ量εactual (n)を変形前後の前記規則格子の幾何学的関係(下記の式(10))から得る、
- 縦横に基本走査線間隔T0の整数倍の間隔(整数は1以上)に走査し得る走査点からなる走査線を有する走査型顕微鏡を備え、
試料台に載置されその表面に直交する二方向にピッチp(pはT0に近接する)の規則交差格子が生成された試料の表面を前記走査型顕微鏡の走査線により走査して前記試料の表面の2次元モアレ縞画像を取得し、
取得した前記2次元モアレ縞画像の走査点の輝度情報から前記試料の変位ひずみ量を計算し、
計算した前記試料の変位ひずみ量を表示する、
走査モアレ方法による変位ひずみ分布測定システムであって、
前記走査型顕微鏡の直交する二方向の走査線間隔Tx (n x )、Ty (n y )をそれぞれ前記ピッチpのn x 倍、n y 倍(n x とn y の一方は1以上の整数であり、他方は2以上の整数)の近傍であるn x T 0 、n y T 0 とし、
前記規則交差格子と前記走査線間隔Tx (n x )、Ty (n y )の走査点とを近接して配置し前記規則交差格子と前記走査点が不一致またはずれが生じるようにしたことを特徴とする、変位ひずみ分布測定システム。 - 前記規則交差格子の相対的ひずみ量εi(ni)(i=x,y)は、前記2次元モアレ縞画像に画像処理を施して直交する二方向の1次元走査モアレ縞に分離した後に前記規則交差格子の二方向における走査点に相対的な変位ui(ni)(i=x,y)(下記の式(14))の一次微分(下記の式(15))から求め、
- 前記二方向の規則交差格子のひずみ量εi_actual(ni)(i=x,y)は、変形前後の前記規則交差格子ピッチの幾何学的関係(下記の式(16))から求め、
- 少なくとも対物レンズと、二方向に整列した撮像素子からなるイメージセンサとを備えた撮影装置を用いて、その表面に前記二方向にピッチPの規則交差格子が生成された測定物の表面を撮影して2次元モアレ縞画像を取得し、
取得した前記2次元モアレ縞画像の撮像素子に記憶された輝度情報から前記測定物の変位ひずみ量を計算し、
計算した前記測定物の変位ひずみ量を表示する、
サンプリングモアレ方法による変位ひずみ分布測定システムであって、
前記イメージセンサにおける撮像素子列のピッチは、前記規則交差格子の前記ピッチPの整数倍(整数は1以上)またはその近傍であり、かつ、
前記二方向のうち少なくとも一方向の撮像素子列のピッチは、前記規則交差格子の前記ピッチPの2以上の整数倍またはその近傍であることを特徴とする、変位ひずみ分布測定システム。 - 前記二方向は直交していることを特徴とする請求項7に記載の変位ひずみ分布測定システム。
- 縦横の走査点からなり基本走査線間隔T0の整数倍の間隔(整数は1以上)に走査し得る走査線を有する走査型顕微鏡であって、前記走査型顕微鏡の走査線間隔T(n)を、その表面に一方向にピッチp(pはT0に近接する)の規則格子が生成された試料の前記ピッチpのn倍(nは2以上の整数)の近傍であるnT0とし前記規則格子と走査点が不一致またはずれが生じるようにした走査型顕微鏡を有する、走査モアレ方法による変異ひずみ分布測定システムにおけるコンピュータに、
前記走査型顕微鏡における試料台に載置された前記試料の表面を前記走査型顕微鏡の走査線により走査することで得られた前記試料の表面のモアレ縞画像を取得し、
取得した前記モアレ縞画像の走査点の輝度情報から前記試料の変位ひずみ量を計算し、
計算した前記試料の変位ひずみ量を表示する、
処理を実行させるためのプログラム。 - 縦横に基本走査線間隔T0の整数倍の間隔(整数は1以上)に走査し得る走査点からなる走査線を有する走査型顕微鏡であって、前記走査型顕微鏡の直交する二方向の走査線間隔Tx(nx)、Ty(ny)を、それぞれ、その表面に直交する二方向にピッチp(pはT0に近接する)の規則交差格子が生成された試料の前記ピッチpのnx倍、ny倍(nxとnyの一方は1以上の整数であり、他方は2以上の整数)の近傍であるnxT0、nyT0とし、前記規則交差格子と前記走査線間隔Tx(nx)、Ty(ny)の走査点とを近接して配置し前記規則交差格子と前記走査点が不一致またはずれが生じるようにした走査型顕微鏡を有する、走査型モアレ方法による変異ひずみ分布システムにおけるコンピュータに、
前記走査型顕微鏡における試料台に載置された前記試料の表面を前記走査型顕微鏡の走査線により走査することで得られた前記試料の表面の2次元モアレ縞画像を取得し、
取得した前記2次元モアレ縞画像の走査点の輝度情報から前記試料の変位ひずみ量を計算し、
計算した前記試料の変位ひずみ量を表示する、
処理を実行させるためのプログラム。 - 少なくとも対物レンズと、二方向に整列した撮像素子からなるイメージセンサとを備えた撮影装置であって、前記イメージセンサにおける撮像素子列のピッチは、その表面に前記二方向にピッチPの規則交差格子が生成された測定物の前記ピッチPの整数倍(整数は1以上)またはその近傍であり、かつ、前記二方向のうち少なくとも一方向の撮像素子列のピッチは、前記ピッチPの2以上の整数倍またはその近傍である撮影装置を用いて前記測定物の表面を撮影することで得られる2次元モアレ縞画像を取得し、
取得した前記2次元モアレ縞画像の撮像素子に記憶された輝度情報から前記測定物の変位ひずみ量を計算し、
計算した前記測定物の変位ひずみ量を表示する、
処理をコンピュータに実行させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016028169A JP6813162B2 (ja) | 2016-02-17 | 2016-02-17 | モアレ法による高速変位・ひずみ分布測定方法及び測定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016028169A JP6813162B2 (ja) | 2016-02-17 | 2016-02-17 | モアレ法による高速変位・ひずみ分布測定方法及び測定装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017146202A JP2017146202A (ja) | 2017-08-24 |
| JP2017146202A5 JP2017146202A5 (ja) | 2019-03-07 |
| JP6813162B2 true JP6813162B2 (ja) | 2021-01-13 |
Family
ID=59682935
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016028169A Active JP6813162B2 (ja) | 2016-02-17 | 2016-02-17 | モアレ法による高速変位・ひずみ分布測定方法及び測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6813162B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6583761B2 (ja) | 2016-09-27 | 2019-10-02 | 国立研究開発法人産業技術総合研究所 | 周期模様を利用した三次元形状・変位・ひずみ測定装置、方法およびそのプログラム |
| CN108196091B (zh) * | 2018-03-30 | 2024-01-26 | 南京邮电大学 | 基于cmos的光电加速度传感器 |
| CN108469443A (zh) * | 2018-04-18 | 2018-08-31 | 北京航空航天大学 | 基于二维错位吸收光栅的x射线光栅差分相位衬度成像方法及装置 |
| CN110068284B (zh) * | 2019-05-20 | 2020-10-30 | 北京建筑大学 | 利用高速摄影测量技术监测塔式起重机的方法 |
| CN110398201B (zh) * | 2019-08-06 | 2021-08-06 | 湖南大学 | 一种联合数字图像相关技术和莫尔抽样法的位移测量方法 |
| CN111325718B (zh) * | 2020-01-23 | 2023-07-25 | 深圳大学 | 应变模态分析方法及相关装置 |
| CN113720268B (zh) * | 2021-08-03 | 2022-10-25 | 西安交通大学 | 基于光强原理测量应变的数码云纹方法、系统、设备及存储介质 |
-
2016
- 2016-02-17 JP JP2016028169A patent/JP6813162B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017146202A (ja) | 2017-08-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6813162B2 (ja) | モアレ法による高速変位・ひずみ分布測定方法及び測定装置 | |
| JP6583761B2 (ja) | 周期模様を利用した三次元形状・変位・ひずみ測定装置、方法およびそのプログラム | |
| JP5818218B2 (ja) | 高次元輝度情報を用いた縞画像の位相分布解析方法、装置およびそのプログラム | |
| JP4831703B2 (ja) | 物体の変位測定方法 | |
| JP6983402B2 (ja) | 汚れの影響を受けにくいひずみ分布測定方法とそのプログラム | |
| JP6753592B2 (ja) | 変形測定方法、変形測定装置、及びそのプログラム | |
| JP2017146202A5 (ja) | ||
| JP5160520B2 (ja) | 結晶格子モアレパターン取得方法および走査型顕微鏡 | |
| JP2018136273A (ja) | 残留熱ひずみ測定方法、残留熱ひずみ測定装置、及びそのプログラム | |
| JP5130513B2 (ja) | 3次元変位ひずみ計測方法及び装置 | |
| JP5466325B1 (ja) | 物体に取り付けた格子の画像から物体の物理量を測定する方法 | |
| CN112697063B (zh) | 一种基于显微视觉的芯片应变测量方法 | |
| JP6472675B2 (ja) | 二次モアレ縞による顕微鏡走査ゆがみの影響を受けない変形測定方法 | |
| JPWO2016001986A1 (ja) | 計測方法、計測装置、計測プログラム及び計測プログラムを記録した、コンピュータ読み取り可能な記録媒体 | |
| Bhushan et al. | Displacement and strain field measurements from SPM images | |
| CN101819217A (zh) | 一种微纳米尺度平面周期性结构的反演方法 | |
| JP2005121552A (ja) | 格子歪み測定装置及び測定方法 | |
| JP2019152498A (ja) | 2次元格子パターンを用いる面外変位計測方法およびその装置 | |
| JP4820998B2 (ja) | 位相特異点検出方法、及び、位相特異点検出装置、並びに、プログラム | |
| JP2004077247A (ja) | 収束電子回折法による局所領域の格子歪み測定方法及びその測定装置 | |
| JP6755492B2 (ja) | モアレによる材料の欠陥分布の可視化方法およびその自動検出方法、プログラム、装置 | |
| CN108921794B (zh) | 扫描成像模式下的动态图像重建方法及装置 | |
| JP3439405B2 (ja) | 歪み検出顕微鏡画像処理装置及び方法 | |
| JP2008111726A (ja) | 3次元位相計測方法とそれに使われる微分干渉顕微鏡 | |
| JP2022096690A (ja) | 画像処理方法、装置及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A80 | Written request to apply exceptions to lack of novelty of invention |
Free format text: JAPANESE INTERMEDIATE CODE: A80 Effective date: 20160226 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180601 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190123 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191204 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201007 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201210 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6813162 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |