JP6782525B2 - 自律走行体装置 - Google Patents
自律走行体装置 Download PDFInfo
- Publication number
- JP6782525B2 JP6782525B2 JP2014174323A JP2014174323A JP6782525B2 JP 6782525 B2 JP6782525 B2 JP 6782525B2 JP 2014174323 A JP2014174323 A JP 2014174323A JP 2014174323 A JP2014174323 A JP 2014174323A JP 6782525 B2 JP6782525 B2 JP 6782525B2
- Authority
- JP
- Japan
- Prior art keywords
- infrared signal
- main body
- infrared
- receiving
- receiving means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Electric Vacuum Cleaner (AREA)
- Selective Calling Equipment (AREA)
Description
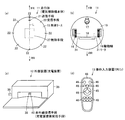
11 走行体としての電気掃除機本体
12 外部装置としての充電装置
13 操作入力装置としてのリモコン
15 本体ケース
16 駆動輪
21 送信手段
22 受信手段
27 制御手段
31 モータ
40 赤外線受信手段としての充電装置側受信手段
51 外部装置としてのバーチャルガード
55 赤外線受信手段としての赤外線受信部
FS フレームスペース
IRS 赤外線信号
SB ストップビット
Claims (2)
- 本体ケース、この本体ケースを走行させる駆動輪、この駆動輪を駆動させるモータ、赤外線信号を受信する受信手段、赤外線信号を前記本体ケースの外部に送信する送信手段、前記モータおよび前記送信手段の動作を前記受信手段により受信した赤外線信号に応じて制御をする制御手段を備え、自律走行可能な走行体と、
この走行体に対して赤外線信号を送信する操作入力装置と、
赤外線信号を受信する赤外線受信手段を備え、前記走行体と別体の外部装置とを具備し、
前記制御手段は、前記受信手段により受信した前記操作入力装置からの赤外線信号を処理して他の赤外線信号を前記外部装置へと前記送信手段により送信させる場合に、前記受信手段により赤外線信号を受信すると、その赤外線信号を処理し、その処理した赤外線信号のストップビットから所定時間が経過した後に前記送信手段により前記外部装置へと赤外線信号を送信させる
ことを特徴とした自律走行体装置。 - 本体ケース、この本体ケースを走行させる駆動輪、この駆動輪を駆動させるモータ、赤外線信号を受信する受信手段、赤外線信号を前記本体ケースの外部に送信する送信手段、前記モータおよび前記送信手段の動作を前記受信手段により受信した赤外線信号に応じて制御をする制御手段を備え、自律走行可能な走行体と、
この走行体に対して赤外線信号を送信する操作入力装置と、
赤外線信号を受信する赤外線受信手段を備え前記走行体と別体の外部装置とを具備し、
前記制御手段は、前記受信手段により受信した前記操作入力装置からの赤外線信号を処理して他の赤外線信号を前記外部装置へと前記送信手段により送信させる場合に、前記受信手段により赤外線信号を受信すると、その赤外線信号を処理し、その処理した赤外線信号のフレームスペース後に前記送信手段により前記外部装置へと赤外線信号を送信させる
ことを特徴とした自律走行体装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014174323A JP6782525B2 (ja) | 2014-08-28 | 2014-08-28 | 自律走行体装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014174323A JP6782525B2 (ja) | 2014-08-28 | 2014-08-28 | 自律走行体装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016051913A JP2016051913A (ja) | 2016-04-11 |
| JP6782525B2 true JP6782525B2 (ja) | 2020-11-11 |
Family
ID=55659159
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014174323A Active JP6782525B2 (ja) | 2014-08-28 | 2014-08-28 | 自律走行体装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6782525B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106264358B (zh) * | 2016-09-09 | 2020-06-30 | 杭州匠龙机器人科技有限公司 | 一种智能回充系统的智能回充方法 |
| KR20230045457A (ko) * | 2021-09-28 | 2023-04-04 | 삼성전자주식회사 | 로봇 및 그 제어 방법 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08163531A (ja) * | 1994-11-30 | 1996-06-21 | Sanyo Electric Co Ltd | Catv端末装置 |
| JPH08204653A (ja) * | 1995-01-30 | 1996-08-09 | Sharp Corp | 受光装置 |
| JPH08289170A (ja) * | 1995-04-18 | 1996-11-01 | Sanyo Electric Co Ltd | 遠隔制御システム |
| WO2006098306A1 (ja) * | 2005-03-16 | 2006-09-21 | Pioneer Corporation | 遠隔制御装置及び方法、遠隔被制御装置及び方法、遠隔制御システム及び遠隔制御システムにおける制御方法、並びにコンピュータプログラム |
| KR20080060535A (ko) * | 2006-12-27 | 2008-07-02 | 주식회사 유진로봇 | 자율 이동 로봇의 자동 충전 장치 및 그를 이용한 자동충전 방법 |
| JP2013146302A (ja) * | 2012-01-17 | 2013-08-01 | Sharp Corp | 自走式電子機器 |
| JP2013250005A (ja) * | 2012-05-31 | 2013-12-12 | Sharp Corp | 自走式電子機器 |
| JP2013255107A (ja) * | 2012-06-07 | 2013-12-19 | Sharp Corp | コントローラ、制御端末、遠隔制御システムおよび通信方法をプロセッサに実行させるためのプログラム |
| JP2014150339A (ja) * | 2013-01-31 | 2014-08-21 | Toshiba Corp | 家電制御装置 |
-
2014
- 2014-08-28 JP JP2014174323A patent/JP6782525B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016051913A (ja) | 2016-04-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3093727B1 (en) | Traveling body device | |
| EP3727122B1 (en) | Robot cleaners and controlling method thereof | |
| JP4522426B2 (ja) | ロボット掃除機システム | |
| KR102070066B1 (ko) | 로봇 청소기 및 그 제어 방법 | |
| WO2015105178A1 (ja) | 自走式機器 | |
| JP2007175286A (ja) | 自動掃除システム | |
| US20230042764A1 (en) | Robot cleaner and method for controlling the same | |
| JP6636289B2 (ja) | 走行体装置 | |
| EP4026468B1 (en) | Robot cleaner and control method therefor | |
| JP6782525B2 (ja) | 自律走行体装置 | |
| JP6382634B2 (ja) | 自律走行体装置 | |
| JP2015115000A (ja) | 走行体装置 | |
| JP7014657B2 (ja) | 掃除装置 | |
| JP2018185871A (ja) | 自走式機器 | |
| JP2020099461A (ja) | 自律走行型掃除機 | |
| JP7232079B2 (ja) | 自律走行体装置 | |
| US20230030384A1 (en) | Robot cleaner and method for controlling the same | |
| KR100726199B1 (ko) | 로봇 청소기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20160616 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170612 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180815 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181010 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190403 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190528 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191016 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200115 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20200115 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20200127 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20200129 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20200221 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20200226 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200527 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200617 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200805 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20200902 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20201014 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20201014 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201020 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6782525 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |