JP6778423B2 - 遠心処理装置及びそれに適用される伝達機構 - Google Patents
遠心処理装置及びそれに適用される伝達機構 Download PDFInfo
- Publication number
- JP6778423B2 JP6778423B2 JP2016101919A JP2016101919A JP6778423B2 JP 6778423 B2 JP6778423 B2 JP 6778423B2 JP 2016101919 A JP2016101919 A JP 2016101919A JP 2016101919 A JP2016101919 A JP 2016101919A JP 6778423 B2 JP6778423 B2 JP 6778423B2
- Authority
- JP
- Japan
- Prior art keywords
- axis
- rotation
- revolution
- rotational force
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 title claims description 46
- 230000005540 biological transmission Effects 0.000 title claims description 41
- 238000011282 treatment Methods 0.000 claims description 42
- 239000000463 material Substances 0.000 claims description 36
- 230000000452 restraining effect Effects 0.000 claims description 10
- 230000008878 coupling Effects 0.000 claims 2
- 238000010168 coupling process Methods 0.000 claims 2
- 238000005859 coupling reaction Methods 0.000 claims 2
- 238000003756 stirring Methods 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 239000012530 fluid Substances 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 238000010298 pulverizing process Methods 0.000 description 3
- MCMNRKCIXSYSNV-UHFFFAOYSA-N Zirconium dioxide Chemical compound O=[Zr]=O MCMNRKCIXSYSNV-UHFFFAOYSA-N 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 239000006185 dispersion Substances 0.000 description 2
- 238000004945 emulsification Methods 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000003479 dental cement Substances 0.000 description 1
- 239000002978 dental impression material Substances 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 239000000945 filler Substances 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 239000006072 paste Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000000565 sealant Substances 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29B—PREPARATION OR PRETREATMENT OF THE MATERIAL TO BE SHAPED; MAKING GRANULES OR PREFORMS; RECOVERY OF PLASTICS OR OTHER CONSTITUENTS OF WASTE MATERIAL CONTAINING PLASTICS
- B29B7/00—Mixing; Kneading
- B29B7/02—Mixing; Kneading non-continuous, with mechanical mixing or kneading devices, i.e. batch type
- B29B7/06—Mixing; Kneading non-continuous, with mechanical mixing or kneading devices, i.e. batch type with movable mixing or kneading devices
- B29B7/10—Mixing; Kneading non-continuous, with mechanical mixing or kneading devices, i.e. batch type with movable mixing or kneading devices rotary
- B29B7/106—Mixing; Kneading non-continuous, with mechanical mixing or kneading devices, i.e. batch type with movable mixing or kneading devices rotary using rotary casings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29B—PREPARATION OR PRETREATMENT OF THE MATERIAL TO BE SHAPED; MAKING GRANULES OR PREFORMS; RECOVERY OF PLASTICS OR OTHER CONSTITUENTS OF WASTE MATERIAL CONTAINING PLASTICS
- B29B7/00—Mixing; Kneading
- B29B7/80—Component parts, details or accessories; Auxiliary operations
- B29B7/84—Venting or degassing ; Removing liquids, e.g. by evaporating components
- B29B7/845—Venting, degassing or removing evaporated components in devices with rotary stirrers
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Degasification And Air Bubble Elimination (AREA)
- Mixers With Rotating Receptacles And Mixers With Vibration Mechanisms (AREA)
- Accessories For Mixers (AREA)
Description
はじめに、本実施の形態に係る遠心処理装置1の構成について、図1〜図5を参照しながら説明する。ここで、図1〜図3は、遠心処理装置1の概略模式図である。
遠心処理装置1は、図1に示すように、筐体の底部を形成する基台2に支持箱体3が防振ばね4を介して水平に支持されている。
遠心処理装置1は、図1に示すように、公転体10を含む。公転体10は、所定の回転軸線を中心に回転可能に構成されている。本実施の形態では、公転体10は、図示するように、鉛直に延びる仮想の直線(公転軸線L1)を中心に回転可能に構成されている。ただし、公転体10は、水平方向に延びる直線を軸線として回転するように構成することも可能である(図示せず)。また、公転体10は、矩形枠状であり、下枠面12、上枠面14、左右の側枠面16、16を有する。
遠心処理装置1は、図1に示すように、容器ホルダ20を含む。容器ホルダ20は、収納容器100を保持する役割を果たすものであり、下向きに開閉自在に形成されることで、その内部に収納容器100を収納することが可能である。本実施の形態では、容器ホルダ20は、公転体10の左右の側枠面16、16の間に、公転軸線L1に対して45度傾斜するように形成された収納容器支持枠18に支持される。詳しくは、容器ホルダ20は、上端側に突設された自転軸22を有し、この自転軸22が、収納容器支持枠18の公転軸線L1と交差する位置に配置された自転軸ベアリングユニット24に支持される。これにより、容器ホルダ20は、公転軸線L1と交差する仮想の直線(自転軸線L2)を中心に、公転体10に対して回転(自転)可能となる。
遠心処理装置1は、図1に示すように、カウンターウエイト30を含む。カウンターウエイト30は、遠心処理装置1を安定して運転させるためのものであり、公転軸線L1からの距離を変更することが可能である。詳しくは、カウンターウエイト30は、公転体10の容器ホルダ20と対向する側枠面16側に設けられて、公知の機構により公転軸線L1に遠近自在に形成される。尚、カウンターウエイト30へのアクセスは、それに対向する支持箱体3の対向面に設けられた開閉自在の蓋部(図示せず)を介して可能とされる。
遠心処理装置1は、図1に示すように、公転駆動機構40を含む。公転駆動機構40は、支持箱体3の底板3aの下面に固定された公転駆動モータ42を有する。この公転駆動モータ42は、公転体10の下枠面12から公転軸線L1に合わせて突設した公転軸43(公転駆動機構40の構成要素の一つ)に対し回転力を付与可能であり、これにより公転軸線L1を中心に公転体10を回転させることができる。即ち、公転駆動モータ42は、公転軸線L1を中心に容器ホルダ20(収納容器100)を公転させることができる。
遠心処理装置1は、図1に示すように、自転駆動機構50を含む。以下、自転駆動機構50について説明する。尚、自転駆動機構50は、上記公転駆動機構40と共に、駆動部を構成する。
S2:自転用太陽歯車52(中心軸52a)の回転速度(rpm)
S3:自転用衛星歯車54(容器ホルダ20)の回転速度(rpm)
R1:自転用太陽歯車52に対する自転用衛星歯車54の回転比
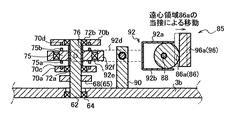
遠心処理装置1は、図1〜図3に示すように、伝達機構60を含む。以下、伝達機構60について説明する。
R3:第1被選択部70a選択時の副軸62に対する中心軸52aの回転比

次に、図1を参照して、本実施の形態に適用可能な収納容器100について説明する。
本実施の形態に適用可能な材料Mは、流体として挙動するものであればよく、その組成や用途は特に限定されるものではない。材料Mとして、流体成分(樹脂等)のみを含む材料や、流体成分のほかに粒状成分(粉状成分)を含む材料などを適用することができる。材料Mとして、例えば、接着剤、シーラント剤、液晶材料、LEDの蛍光体と樹脂とを含む混合材料、半田ペースト、歯科用印象材料、歯科用セメント(穴埋め剤等)、液状の薬剤等の種々の材料を適用することができる。また、材料Mとして、粒状(粉状)材料と、これを粉砕するためのメディア(例えばジルコニアボール)を適用することも可能である。あるいは、材料Mとして、乳化処理の対象となる流体を適用することも可能である。
本実施の形態に係る材料Mの処理方法は、まず、材料Mが収納された収納容器100を容器ホルダ20に保持させる。そして、伝達機構60において、拘束部80により、選択部75、及び拘束部80を制御する。ここで、選択部75、及び拘束部80の状態毎の中心軸52a(自転用太陽歯車52)の回転速度S2は、上記説明した表1に示すとおりである。同表、及び上記説明した数式1に基づけば、選択部75、及び拘束部80の状態毎の自公転比は、表2のとおりとなる。
遠心処理装置1によると、伝達機構60を備えることで、簡便に、種々異なる自公転比に変更することが可能である。以下、この作用について詳述する。
遠心処理装置1において、第1伝達子66、第2伝達子68、第1被選択部70a、第2被選択部70b、第3伝達子78a、及び第4伝達子78bは、歯車により構成してよい。この場合において、第1伝達子66と第2伝達子68との間等に、中間歯車(図示せず)を適宜配置しても良い。その他、チェーン等を使用することも想定される。
2)選択部75が第2被選択部70bを選択する場合は、突出部19に固定された第4伝達子78bと第2被選択部70bとの間で回転力の伝達を行うことにより、公転体10と副軸62との間での回転力の伝達を行う。そして、第2伝達子68と中心軸52aに固定された第1伝達子66との間で回転力の伝達を行うことで、副軸62と中心軸52aとの間で回転力の伝達を行う。これらにより、公転体10と中心軸52aとの間で回転力の伝達が行われる。
3)選択部75が第1被選択部70a、及び第2被選択部70bの何れをも選択せず、拘束部80が中心軸52aを拘束しない場合、中心軸52aは公転体10と供回りする。
4)選択部75が第1被選択部70a、及び第2被選択部70bの何れをも選択せず、拘束部80が中心軸52aを拘束する場合、中心軸52aは回転しない(中心軸52aの回転速度S2は、0(rpm)となる。)。なお、この際、拘束部80は、中心軸52aを直接拘束してよい。あるいは、拘束部80は、副軸62を拘束し、第2伝達子68、及び第1伝達子66をも利用して、中心軸52aを拘束してよい。
2)選択部75が第2被選択部70bを選択する場合は、第2被選択部70bと環状体に固定された第4伝達子78bとの間で回転力の伝達を行うことにより、副軸62と環状体との間で回転力の伝達を行う。また、公転軸43に固定された第1伝達子66と第2伝達子68との間で回転力の伝達を行うことで、公転軸43と副軸62との間での回転力の伝達も行われる。これらにより、公転軸43と環状体との間で回転力の伝達が行われる。
3)選択部75が第1被選択部70a、及び第2被選択部70bの何れをも選択せず、拘束部80が環状体を拘束しない場合、環状体は公転体10と供回りする。
4)選択部75が第1被選択部70a、及び第2被選択部70bの何れをも選択せず、拘束部80が環状体を拘束する場合、環状体は回転しない(環状体の回転速度は、0(rpm)となる。)。
Claims (3)
- 公転軸線を中心に回転可能な公転体と、
該公転体に保持されて、自転軸線を中心に回転可能であり、材料を収納した収納容器を保持可能な容器ホルダと、
前記公転軸線を中心に、前記公転体と独立して回転可能な中心軸と、
前記公転体に回転力を付与すると共に、前記公転体と前記中心軸との回転速度差に基づき、前記容器ホルダの回転速度を定める駆動部と、
前記公転体と前記中心軸との間で回転力を伝達可能な伝達機構と、
を備え、
前記伝達機構は、
回転軸線を中心に回転可能な副軸と、
前記公転体と前記副軸との間で回転力を伝達可能な伝達部と、
前記回転軸線を中心に、前記副軸と独立して回転可能であり、前記中心軸との間で回転力を伝達可能な被選択部と、
前記副軸と共に前記回転軸線を中心に回転可能であると共に、前記副軸に沿って移動可能であり、前記被選択部を選択して前記副軸と供回りさせることで、前記副軸と前記中心軸との間での回転力の伝達を可能とする選択部と、
前記選択部を、前記副軸に沿って移動させることで、選択する前記被選択部に結合させる制御部と、
を含み、
前記被選択部は複数備えられ、
前記選択部は、前記被選択部の何れにも結合可能であり、前記被選択部の何れかに結合することで当該被選択部を選択し、前記公転体に対する前記中心軸の回転比を変更する遠心処理装置。 - 前記伝達機構は、更に、
前記公転体から前記中心軸への回転力の伝達にかわり、前記中心軸を拘束する拘束部を備える、請求項1に記載の遠心処理装置。 - 公転軸線を中心に回転可能な公転体と、該公転体に保持されて、自転軸線を中心に回転可能であり、材料を収納した収納容器を保持可能な容器ホルダと、前記公転軸線を中心に、前記公転体と独立して回転可能な中心軸と、前記公転体に回転力を付与すると共に、前記公転体と前記中心軸との回転速度差に基づき、前記容器ホルダの回転速度を定める駆動部とを備える遠心処理装置に適用される伝達機構であって、
回転軸線を中心に回転可能な副軸と、
前記公転体と前記副軸との間で回転力を伝達可能な伝達部と、
前記回転軸線を中心に、前記副軸と独立して回転可能であり、前記中心軸との間で回転力を伝達可能な被選択部と、
前記副軸と共に前記回転軸線を中心に回転可能であると共に、前記副軸に沿って移動可能であり、前記被選択部を選択して前記副軸と供回りさせることで、前記副軸と前記中心軸との間での回転力の伝達を可能とする選択部と、
前記選択部を、前記副軸に沿って移動させることで、選択する前記被選択部に結合させる制御部と、
を含み、
前記公転体と前記中心軸との間での回転力の伝達を可能とする伝達機構であり、
前記被選択部は複数備えられ、
前記選択部は、前記被選択部の何れにも結合可能であり、前記被選択部の何れかに結合することで当該被選択部を選択し、前記公転体に対する前記中心軸の回転比を変更する伝達機構。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016101919A JP6778423B2 (ja) | 2016-04-29 | 2016-04-29 | 遠心処理装置及びそれに適用される伝達機構 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016101919A JP6778423B2 (ja) | 2016-04-29 | 2016-04-29 | 遠心処理装置及びそれに適用される伝達機構 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020105316A Division JP7202591B2 (ja) | 2020-06-18 | 2020-06-18 | 遠心処理装置及びそれに適用される伝達機構 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017196610A JP2017196610A (ja) | 2017-11-02 |
| JP2017196610A5 JP2017196610A5 (ja) | 2020-02-13 |
| JP6778423B2 true JP6778423B2 (ja) | 2020-11-04 |
Family
ID=60238658
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016101919A Active JP6778423B2 (ja) | 2016-04-29 | 2016-04-29 | 遠心処理装置及びそれに適用される伝達機構 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6778423B2 (ja) |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4084493B2 (ja) * | 1999-03-25 | 2008-04-30 | 株式会社シンキー | 攪拌脱泡装置 |
| JP2003320233A (ja) * | 2002-04-26 | 2003-11-11 | I K S:Kk | 溶剤等の攪拌・脱泡装置 |
| JP4068981B2 (ja) * | 2003-02-12 | 2008-03-26 | 株式会社シンキー | 攪拌脱泡装置 |
| JP2006263691A (ja) * | 2005-03-23 | 2006-10-05 | Eme:Kk | 脱泡混練方法及び脱泡混練装置 |
| JP4740749B2 (ja) * | 2006-01-17 | 2011-08-03 | 株式会社ジャパンユニックス | ミキサー |
| CN103406052A (zh) * | 2013-08-05 | 2013-11-27 | 绵阳世诺科技有限公司 | 齿轮行星式重力离散器 |
-
2016
- 2016-04-29 JP JP2016101919A patent/JP6778423B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017196610A (ja) | 2017-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5687038B2 (ja) | 遠心機 | |
| NO152194B (no) | Anordning for blanding av flytedyktig materiale i en beholder | |
| JP2016073970A (ja) | 遠心機、及び伝達ユニット | |
| EP1609434A1 (en) | Mixer for tooth restoration material | |
| JP5718285B2 (ja) | 遠心機、駆動機構、及び駆動方法 | |
| EP2210655A1 (en) | Churning deaerator | |
| WO2012046723A1 (ja) | 水剤供給装置 | |
| JP4291913B2 (ja) | 混合攪拌装置 | |
| JP6081154B2 (ja) | 遠心機、及び収納部材 | |
| JP5506039B2 (ja) | 撹拌脱泡装置に使用する容器、及び、撹拌脱泡装置 | |
| KR20170138523A (ko) | 유체 제품들을 위한 혼합기 | |
| JP2009202145A (ja) | 攪拌脱泡装置及び収納容器 | |
| JP2006263691A (ja) | 脱泡混練方法及び脱泡混練装置 | |
| JP6647754B2 (ja) | 遠心機、及び駆動機構 | |
| JP2020157298A (ja) | 遠心処理装置及びそれに適用される伝達機構 | |
| JPH1043567A (ja) | 混練装置 | |
| JP4188411B1 (ja) | 攪拌脱泡装置の停止方法及び攪拌脱泡装置 | |
| JP6778423B2 (ja) | 遠心処理装置及びそれに適用される伝達機構 | |
| JP2004243158A (ja) | 攪拌脱泡装置 | |
| JP2009082895A (ja) | 混練脱泡装置及び被混練脱泡材料の混練脱泡方法 | |
| JP2009291700A (ja) | 攪拌脱泡装置 | |
| JP6086596B2 (ja) | 自転・公転式の撹拌・脱泡装置 | |
| JP5575344B1 (ja) | 遠心機、及び送受信機構 | |
| JP2016195991A (ja) | 三次元式の自転・公転式の撹拌装置 | |
| JP2011092912A (ja) | 攪拌脱泡方法及び攪拌脱泡装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170828 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170915 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20181001 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20181017 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190324 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190401 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200103 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200608 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200618 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201002 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201005 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6778423 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |