JP6759727B2 - 印刷装置、プログラム - Google Patents
印刷装置、プログラム Download PDFInfo
- Publication number
- JP6759727B2 JP6759727B2 JP2016113330A JP2016113330A JP6759727B2 JP 6759727 B2 JP6759727 B2 JP 6759727B2 JP 2016113330 A JP2016113330 A JP 2016113330A JP 2016113330 A JP2016113330 A JP 2016113330A JP 6759727 B2 JP6759727 B2 JP 6759727B2
- Authority
- JP
- Japan
- Prior art keywords
- medium
- transport
- pattern
- discharge head
- liquid
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Handling Of Sheets (AREA)
- Controlling Rewinding, Feeding, Winding, Or Abnormalities Of Webs (AREA)
- Ink Jet (AREA)
Description
液体を吐出する複数のノズルを有する液体吐出ヘッドと、
前記液体吐出ヘッドを搭載して往復移動するキャリッジと、
前記液体吐出ヘッドのノズル配列方向に媒体を搬送する搬送手段と、
前記搬送手段による前記媒体の搬送を制御する搬送制御手段と、
前記媒体に形成されるパターンを検知する複数の検知手段と、を備え、
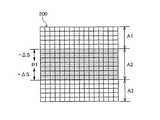
前記複数の検知手段は、前記媒体の搬送方向にずらして配置され、
前記搬送制御手段は、印刷動作中に、
前記液体吐出ヘッドから前記液体を吐出させて前記媒体に前記パターンを複数形成させ、
前記搬送手段で前記媒体を所定量搬送して前記複数の検知手段で前記複数のパターンを一度に検知させ、
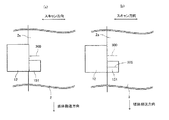
前記複数の検知手段の各検知結果から前記液体を吐出させたノズルの異常判定及び前記媒体の目標位置に対する実際の位置のずれを検出し、検出したずれに応じて前記搬送手段によって前記媒体の位置を補正する補正搬送を行う制御を行う
構成とした。
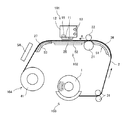
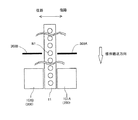
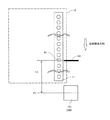
2 印刷媒体
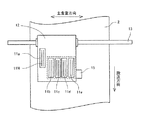
11 ヘッド
12 キャリッジ
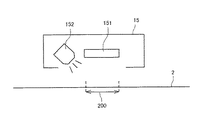
15 パターン検知ユニット
21 搬送ローラ
25 プラテン部材
41 巻取りロール
101 印刷部
102 搬送部
103 ロール収納部
104 ロール巻取り部
151、151A、151B パターンセンサ(検知手段)
200 検知領域
300 パターン
500 制御部
Claims (6)
- 液体を吐出する複数のノズルを有する液体吐出ヘッドと、
前記液体吐出ヘッドを搭載して往復移動するキャリッジと、
前記液体吐出ヘッドのノズル配列方向に媒体を搬送する搬送手段と、
前記搬送手段による前記媒体の搬送を制御する搬送制御手段と、
前記媒体に形成されるパターンを検知する複数の検知手段と、を備え、
前記複数の検知手段は、前記媒体の搬送方向にずらして配置され、
前記搬送制御手段は、印刷動作中に、
前記液体吐出ヘッドから前記液体を吐出させて前記媒体に前記パターンを複数形成させ、
前記搬送手段で前記媒体を所定量搬送して前記複数の検知手段で前記複数のパターンを一度に検知させ、
前記複数の検知手段の各検知結果から前記液体を吐出させたノズルの異常判定及び前記媒体の目標位置に対する実際の位置のずれを検出し、検出したずれに応じて前記搬送手段によって前記媒体の位置を補正する補正搬送を行う制御を行う
ことを特徴とする印刷装置。 - 前記パターンの形成に使用する前記液体吐出ヘッドのノズルは、前記検知手段の基準位置から前記所定量分又は前記所定量の整数倍の距離分離れた位置のノズルである
ことを特徴とする請求項1に記載の印刷装置。 - 前記検知手段は、前記キャリッジに搭載されている
ことを特徴とする請求項1又は2に記載の印刷装置。 - 前記検知手段は、固定位置に配置されている
ことを特徴とする請求項1又は2に記載の印刷装置。 - 前記検知手段は2次元センサである
ことを特徴とする請求項1ないし4のいずれかに記載の印刷装置。 - 液体を吐出する複数のノズルを有する液体吐出ヘッドと、
前記液体吐出ヘッドを搭載して往復移動するキャリッジと、
前記液体吐出ヘッドのノズル配列方向に媒体を搬送する搬送手段と、
前記媒体に形成されるパターンを検知する複数の検知手段と、を備え、前記複数の検知手段は前記媒体の搬送方向にずらして配置された印刷装置の前記搬送手段による前記媒体の搬送を制御する搬送制御をコンピュータに行わせるためのプログラムであって、
印刷動作中に、
前記液体吐出ヘッドから前記液体を吐出させて前記媒体に前記パターンを複数形成させ、
前記搬送手段で前記媒体を所定量搬送して前記複数の検知手段で前記複数のパターンを一度に検知させ、
前記複数の検知手段の各検知結果から前記液体を吐出させたノズルの異常判定及び前記媒体の目標位置に対する実際の位置のずれを検出し、検出したずれに応じて前記搬送手段によって前記媒体の位置を補正する補正搬送を行う制御を前記コンピュータに行わせることを特徴とするプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016113330A JP6759727B2 (ja) | 2016-06-07 | 2016-06-07 | 印刷装置、プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016113330A JP6759727B2 (ja) | 2016-06-07 | 2016-06-07 | 印刷装置、プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017217808A JP2017217808A (ja) | 2017-12-14 |
| JP6759727B2 true JP6759727B2 (ja) | 2020-09-23 |
Family
ID=60657180
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016113330A Expired - Fee Related JP6759727B2 (ja) | 2016-06-07 | 2016-06-07 | 印刷装置、プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6759727B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7559348B2 (ja) * | 2020-04-30 | 2024-10-02 | 株式会社リコー | 画像形成装置および搬送装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0558012A (ja) * | 1991-07-04 | 1993-03-09 | Canon Inc | 画像記録装置 |
| JPH10100489A (ja) * | 1996-09-26 | 1998-04-21 | Canon Inc | 印刷装置および印刷位置制御方法 |
| JP3512054B2 (ja) * | 1996-11-15 | 2004-03-29 | 日立プリンティングソリューションズ株式会社 | 印刷装置 |
| JP4507509B2 (ja) * | 2002-10-18 | 2010-07-21 | コニカミノルタホールディングス株式会社 | インクジェット記録装置 |
| WO2005016648A1 (ja) * | 2003-08-15 | 2005-02-24 | Seiko Epson Corporation | 印刷装置及び印刷システム |
| JP5392055B2 (ja) * | 2009-12-22 | 2014-01-22 | 株式会社リコー | 搬送制御装置、記録装置、制御方法及びプログラム |
| JP2011178105A (ja) * | 2010-03-03 | 2011-09-15 | Seiko Epson Corp | 記録装置 |
-
2016
- 2016-06-07 JP JP2016113330A patent/JP6759727B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017217808A (ja) | 2017-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9340009B2 (en) | Printing apparatus and processing method therefor | |
| CN112659753A (zh) | 信息处理装置、学习装置以及信息处理装置的控制方法 | |
| JP6417858B2 (ja) | 記録装置及び記録装置の制御方法 | |
| JP5914722B2 (ja) | 記録装置及び記録方法 | |
| JP6291777B2 (ja) | 画像形成装置、テストパターンの形成方法、プログラム | |
| US8926056B1 (en) | Recording apparatus, storage medium storing instructions for recording apparatus, and control method | |
| JP6759727B2 (ja) | 印刷装置、プログラム | |
| JP6236774B2 (ja) | 画像形成装置、プログラム | |
| JP2020001312A (ja) | 画像記録装置 | |
| JP5935600B2 (ja) | 液体吐出装置 | |
| JP6753463B2 (ja) | インクジェット記録装置及びインクジェット記録装置の記録制御方法 | |
| JP4847302B2 (ja) | 記録媒体搬送量測定方法及びインクジェット記録装置 | |
| JP2010162902A (ja) | 画像記録装置 | |
| JP2004292068A (ja) | 画像形成装置 | |
| JP2010115783A (ja) | 画像形成装置 | |
| JP6325400B2 (ja) | インクジェット印刷方法およびインクジェット印刷装置 | |
| EP3246162A1 (en) | Inkjet recording device and method for controlling inkjet recording device | |
| JP4539724B2 (ja) | 画像記録装置 | |
| JP5206338B2 (ja) | 画像形成装置及び画像形成方法 | |
| JP5917168B2 (ja) | 記録装置 | |
| JP6003403B2 (ja) | 液体吐出装置 | |
| JP2009073178A (ja) | 画像形成方法及び画像形成装置 | |
| JP6357810B2 (ja) | 画像形成装置 | |
| JP2009137137A (ja) | 液体吐出装置、及び、評価用パターン形成方法 | |
| JP2004175468A (ja) | 位置検出装置および位置検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190522 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200318 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200804 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200817 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6759727 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |