JP6758277B2 - 作業車 - Google Patents
作業車 Download PDFInfo
- Publication number
- JP6758277B2 JP6758277B2 JP2017248207A JP2017248207A JP6758277B2 JP 6758277 B2 JP6758277 B2 JP 6758277B2 JP 2017248207 A JP2017248207 A JP 2017248207A JP 2017248207 A JP2017248207 A JP 2017248207A JP 6758277 B2 JP6758277 B2 JP 6758277B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle body
- link
- hydraulic
- hydraulic cylinder
- link mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Landscapes
- Vehicle Body Suspensions (AREA)
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
Description
車両本体と、
前記車両本体の左右両側において前後夫々に位置する複数の走行装置と、
複数のリンクが枢支連結され、且つ、前記走行装置を各別に昇降自在に前記車両本体に支持する複数の多関節リンク機構と、
前記多関節リンク機構の複数の前記リンクの夫々の姿勢を変更可能な複数の油圧シリンダと、が備えられ、
前記多関節リンク機構に、一端部が前記車両本体に横軸芯周りで揺動自在に支持された第一リンクと、一端部が前記第一リンクの他端部に横軸芯周りで揺動自在に枢支連結され且つ他端部に前記走行装置が支持された第二リンクと、が備えられ、
前記複数の油圧シリンダとして、前記車両本体に対する前記第一リンクの揺動姿勢を変更可能な第一油圧シリンダと、前記第一リンクに対する前記第二リンクの揺動姿勢を変更可能な第二油圧シリンダと、が備えられ、
前記第一油圧シリンダは、シリンダチューブ側が前記車両本体側の被連結部に枢支連結され、ピストンロッド側が前記第一リンク側の他端部に設けられた他端側の被連結部に枢支連結され、
前記第二油圧シリンダは、シリンダチューブ側が前記第一リンクの前記車両本体側の被連結部に枢支連結され、ピストンロッド側が前記第一リンクの前記車両本体とは反対側の被連結部に枢支連結されている点にある。
前記多関節リンク機構が、前記車両本体の横外端部よりも横外方側に位置する状態で設けられ、
平面視において、前記旋回機構が、前記車両本体と前記多関節リンク機構との間に位置する状態で設けられ、
前記旋回機構の近傍に、前記油圧源から複数の前記油圧シリンダに作動油を供給する作動油供給管を位置保持する供給管保持部が備えられていると好適である。
本発明に係る作業車の特徴構成は、
車両本体と、
走行駆動する複数の走行装置と、
少なくとも2個以上の関節を有するように複数のリンクが枢支連結され、且つ、前記走行装置を各別に昇降自在に前記車両本体に支持する複数の多関節リンク機構と、
前記多関節リンク機構の複数の前記リンクの夫々の姿勢を変更可能な複数の油圧シリンダと、が備えられ、
複数の前記リンクのうちの最も前記車両本体に近い箇所に位置する第一リンクが、本体側連結箇所を支点として揺動自在に支持され、
複数の前記油圧シリンダのうち前記第一リンクを操作する第一油圧シリンダが、前記車両本体に備えられた油圧源からの作動油供給に伴う伸縮操作に伴って、前記第一リンクを揺動操作するように構成され、
前記第一油圧シリンダは、シリンダチューブ側が前記車両本体側の被連結部に枢支連結され、ピストンロッド側が前記第一リンク側の被連結部に枢支連結され、
複数の前記多関節リンク機構の夫々を縦軸芯周りで向き変更可能に前記車両本体に支持する複数の旋回機構が備えられている点にある。
本構成によれば、車両本体に対して複数の走行装置が屈折リンク機構によって各別に昇降自在に支持される。複数の油圧シリンダによって屈折リンク機構が姿勢を変更することにより、複数の走行装置夫々の車両本体に対する高さ(相対高さ)を変更することができる。つまり、車両本体の左右両側における前後夫々に備えられる走行装置の相対高さを変更することができる。その結果、凹凸のある地面を走行するときであっても、複数の走行装置により安定的に接地支持しながら、車両本体を適正な姿勢に維持した状態で走行することが可能となる。又、油圧シリンダは、細かな塵埃や水分等が侵入することがあっても、そのことによって悪影響を受けて動作不良等を起すおそれは少ない。そして、最車両本体側に位置する第一リンクを操作する第一油圧シリンダが、シリンダチューブが車両本体側の被連結部に枢支連結され、ピストンロッドが第一リンク側の被連結部に枢支連結されている。そして、油圧供給源から送り出される作動油が油圧ホース等の作動油供給管を通して供給され、第一油圧シリンダが伸縮操作すると、第一リンクは、本体側連結箇所を支点として揺動操作される。第一油圧シリンダに対する作動油の給排は、シリンダチューブに接続された油圧ホースを通して行われ、作動油の給排によってピストンロッドがスライド移動して伸縮操作する。シリンダチューブが車両本体側の被連結部に枢支連結されているので、伸縮操作してもシリンダチューブは移動量は少ない。その結果、シリンダチューブに接続される油圧ホース等の作動油供給管が、例えば屈折リンク機構に巻き込まれて損傷するなどのおそれが少ないものになる。従って、細かな塵埃や水分等が車体内部に侵入するおそれが大きい作業環境において、凹凸の多い作業地であっても、部材の損傷のおそれを少なくした状態で、車両本体を適正な姿勢に維持して走行することが可能な作業車を得ることが可能となった。
さらに、本構成によれば、車体を左右いずれかに旋回走行させるときは、多関節リンク機構を縦軸芯周りで向き変更することにより、走行装置の車両本体に対する左右向きを変更することができる。その結果、走行装置に横向きの無理な力が加わることがない状態で旋回走行することができる。
本発明においては、
前記多関節リンク機構が、前記車両本体の横外端部よりも横外方側に位置する状態で設けられ、
平面視において、前記旋回機構が、前記車両本体と前記多関節リンク機構との間に位置する状態で設けられ、
前記旋回機構の近傍に、前記油圧源から複数の前記油圧シリンダに作動油を供給する作動油供給管を位置保持する供給管保持部が備えられていると好適である。
本構成によれば、多関節リンク機構により支持される走行装置が、車両本体の横外端部よりも横外方側に位置することになり、横方向に幅広の接地間隔で安定した状態で支持することができる。そして、平面視で、旋回機構が車両本体と多関節リンク機構との間に位置するので、旋回操作によって走行装置をさらに横外側方に向けて広げた姿勢にすることができ、接地姿勢の更なる安定化を図ることができる。
このように旋回機構を介して多関節リンク機構を縦軸芯周りで向き変更可能に構成されるものでは、旋回操作に伴って、油圧源と複数の油圧シリンダとを接続する油圧ホース等の作動油供給管が揺れ動くことがあるが、供給管保持部によって油圧ホース等の作動油供給管の途中箇所が位置保持されるので、作動油供給管が屈折リンク機構に巻き込まれて損傷する等のおそれが少ないものになる。
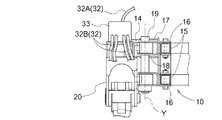
4個の走行装置2は、屈折リンク機構4を介して車両本体1に対して各別に昇降自在に支持されている。屈折リンク機構4は旋回機構12により縦軸芯周りで向き変更可能に車両本体1に支持されている。
〈平坦地での走行形態〉
平坦地を走行する場合、図9,10,11に示すように、複数種の異なる走行形態のいずれかにて走行することができる。すなわち、図9に示すように、4個の駆動輪8が全て接地し且つ4個の補助輪3が全て地面から浮上する4輪走行状態と、図10に示すように、車体前後方向の一方側に位置する駆動輪8が浮上し且つその駆動輪8に対応する補助輪3が接地するとともに、車体前後方向の他方側に位置する駆動輪8が接地し且つその駆動輪8に対応する補助輪3が浮上する2輪走行状態である。
車両本体1を大きく傾斜させて、駆動輪8を高所に乗せることができる。
すなわち、図13に示すように、車体前後方向一方側の2組の駆動輪8と補助輪3とを全て接地させている状態で、車体前後方向他方側の2組の駆動輪8と補助輪3とを支持する屈折リンク機構4を用いて、他方側が上昇するように車両本体1を大きく傾斜させる。そして、車両本体1の重心位置Wが一方側の2組の駆動輪8と補助輪3との接地幅L内に位置するまで傾斜すると、他方側の2組の屈折リンク機構4を大きく伸長させて、駆動輪8を高い所にある地面に乗せることができる。
図16に示すように、4組全ての駆動輪8と補助輪3について、屈折リンク機構4の姿勢を、駆動輪8及び補助輪3の夫々が車体前後方向外端部よりも車体前後方向外側に位置する伸展姿勢に変更操作する。駆動輪8と補助輪3とが全て接地している状態で、第一リ
ク21及び第二リンク22をできるだけ水平姿勢に近付けて車両本体1の高さを低い位置に下げる。このような状態で、法面を乗り上がりながら走行する。この走行形態では、車体前後方向に沿う接地幅が広くなり、大きく傾斜している法面であっても、転倒することなく安定した状態で走行することができる。
3組の駆動輪8と補助輪3とが全て接地して、車両本体1を地面に安定的に接地支持している状態で、残り1組の駆動輪8と補助輪3を支持する屈折リンク機構4を大きく伸長させて、例えば、図13に示すように、駆動輪8を段差の上部面に乗せる。そして、各組の屈折リンク機構4を伸縮させながら、1組ずつ駆動輪8を段差の上部面に乗り移りながら移動することで、段差を乗り越えることが可能となる。図13では、段差が高い場合を示しているが、低い段差であれば、車両本体1が乗り上がることができる。
図17に示すように、4組の屈折リンク機構4を大きく伸長させて車両本体1を接地面から大きく上昇させる。例えば、畝を跨いだ状態で車両本体1を畝の上方に位置させた状態で作業を行うことができる。畝に植えられている作物が成長しても、作物の上方側から例えば、薬剤散布や収穫作業等を行うことができる。
(1)上記実施形態では、走行装置2が油圧モータ9により駆動される構成としたが、この構成に代えて、例えば、車両に搭載されたエンジンの動力がチェーン伝動機構等の機械式伝動機構を介して駆動輪8に供給される構成としてもよい。
2 走行装置
4 多関節リンク機構
5 第一油圧シリンダ
5A シリンダチューブ
5B ピストンロッド
6 第二油圧シリンダ
7 油圧源(作動油供給装置)
12 旋回機構
21 第一リンク
22 第二リンク
32 作動油供給管
33 供給管保持部
Claims (5)
- 車両本体と、
前記車両本体の左右両側において前後夫々に位置する複数の走行装置と、
複数のリンクが枢支連結され、且つ、前記走行装置を各別に昇降自在に前記車両本体に支持する複数の多関節リンク機構と、
前記多関節リンク機構の複数の前記リンクの夫々の姿勢を変更可能な複数の油圧シリンダと、が備えられ、
前記多関節リンク機構に、一端部が前記車両本体に横軸芯周りで揺動自在に支持された第一リンクと、一端部が前記第一リンクの他端部に横軸芯周りで揺動自在に枢支連結され且つ他端部に前記走行装置が支持された第二リンクと、が備えられ、
前記複数の油圧シリンダとして、前記車両本体に対する前記第一リンクの揺動姿勢を変更可能な第一油圧シリンダと、前記第一リンクに対する前記第二リンクの揺動姿勢を変更可能な第二油圧シリンダと、が備えられ、
前記第一油圧シリンダは、シリンダチューブ側が前記車両本体側の被連結部に枢支連結され、ピストンロッド側が前記第一リンク側の他端部に設けられた他端側の被連結部に枢支連結され、
前記第二油圧シリンダは、シリンダチューブ側が前記第一リンクの前記車両本体側の被連結部に枢支連結され、ピストンロッド側が前記第一リンクの前記車両本体とは反対側の被連結部に枢支連結されている作業車。 - 複数の前記多関節リンク機構の夫々を縦軸芯周りで向き変更可能に前記車両本体に支持する複数の旋回機構が備えられている請求項1に記載の作業車。
- 前記多関節リンク機構が、前記車両本体の横外端部よりも横外方側に位置する状態で設けられ、
平面視において、前記旋回機構が、前記車両本体と前記多関節リンク機構との間に位置する状態で設けられ、
前記旋回機構の近傍に、前記油圧源から複数の前記油圧シリンダに作動油を供給する作動油供給管を位置保持する供給管保持部が備えられている請求項2に記載の作業車。 - 車両本体と、
走行駆動する複数の走行装置と、
少なくとも2個以上の関節を有するように複数のリンクが枢支連結され、且つ、前記走行装置を各別に昇降自在に前記車両本体に支持する複数の多関節リンク機構と、
前記多関節リンク機構の複数の前記リンクの夫々の姿勢を変更可能な複数の油圧シリンダと、が備えられ、
複数の前記リンクのうちの最も前記車両本体に近い箇所に位置する第一リンクが、本体側連結箇所を支点として揺動自在に支持され、
複数の前記油圧シリンダのうち前記第一リンクを操作する第一油圧シリンダが、前記車両本体に備えられた油圧源からの作動油供給に伴う伸縮操作に伴って、前記第一リンクを揺動操作するように構成され、
前記第一油圧シリンダは、シリンダチューブ側が前記車両本体側の被連結部に枢支連結され、ピストンロッド側が前記第一リンク側の被連結部に枢支連結され、
複数の前記多関節リンク機構の夫々を縦軸芯周りで向き変更可能に前記車両本体に支持する複数の旋回機構が備えられている作業車。 - 前記多関節リンク機構が、前記車両本体の横外端部よりも横外方側に位置する状態で設けられ、
平面視において、前記旋回機構が、前記車両本体と前記多関節リンク機構との間に位置する状態で設けられ、
前記旋回機構の近傍に、前記油圧源から複数の前記油圧シリンダに作動油を供給する作動油供給管を位置保持する供給管保持部が備えられている請求項4に記載の作業車。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017248207A JP6758277B2 (ja) | 2017-12-25 | 2017-12-25 | 作業車 |
| PCT/JP2018/047285 WO2019131522A1 (ja) | 2017-12-25 | 2018-12-21 | 作業車 |
| CN201880070188.3A CN111247057B (zh) | 2017-12-25 | 2018-12-21 | 作业车 |
| US16/761,293 US11235824B2 (en) | 2017-12-25 | 2018-12-21 | Work vehicle |
| EP18895993.6A EP3733488B1 (en) | 2017-12-25 | 2018-12-21 | Work vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017248207A JP6758277B2 (ja) | 2017-12-25 | 2017-12-25 | 作業車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019111984A JP2019111984A (ja) | 2019-07-11 |
| JP6758277B2 true JP6758277B2 (ja) | 2020-09-23 |
Family
ID=67222064
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017248207A Active JP6758277B2 (ja) | 2017-12-25 | 2017-12-25 | 作業車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6758277B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7419222B2 (ja) * | 2020-12-11 | 2024-01-22 | 株式会社クボタ | 作業車 |
| KR102580615B1 (ko) * | 2021-09-27 | 2023-09-20 | 한국해양과학기술원 | 수중착저형 선박 하부 청소로봇 시스템 |
| JP7798757B2 (ja) * | 2022-11-29 | 2026-01-14 | 株式会社クボタ | 作業車 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5032898Y2 (ja) * | 1971-12-24 | 1975-09-25 | ||
| JPS58157783U (ja) * | 1982-04-15 | 1983-10-21 | 株式会社東芝 | 走行装置 |
| JPH0174907U (ja) * | 1987-11-09 | 1989-05-22 | ||
| JP4797775B2 (ja) * | 2006-04-24 | 2011-10-19 | 株式会社日立製作所 | 2足型移動機構 |
| JP4860508B2 (ja) * | 2007-03-06 | 2012-01-25 | ヤンマー株式会社 | 不整地用走行車両 |
| JP2009096335A (ja) * | 2007-10-17 | 2009-05-07 | Nsk Ltd | 脚型ロボット |
| JP4989546B2 (ja) * | 2008-04-18 | 2012-08-01 | 株式会社クボタ | 走行体 |
| JP6393606B2 (ja) * | 2014-12-11 | 2018-09-19 | 岡本 俊仁 | 法枠用作業車 |
-
2017
- 2017-12-25 JP JP2017248207A patent/JP6758277B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019111984A (ja) | 2019-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6758278B2 (ja) | 作業車 | |
| WO2018181459A1 (ja) | 作業車 | |
| CN111247057B (zh) | 作业车 | |
| US11767071B2 (en) | Work vehicle | |
| CN110494349B (zh) | 作业车 | |
| JP7117989B2 (ja) | 作業車 | |
| JP6899801B2 (ja) | 作業車 | |
| WO2020004024A1 (ja) | 作業車 | |
| JP6899799B2 (ja) | 作業車 | |
| JP6745750B2 (ja) | 作業車 | |
| JP6758277B2 (ja) | 作業車 | |
| JP2020001443A (ja) | 作業車 | |
| JP6843040B2 (ja) | 作業車 | |
| JP6832841B2 (ja) | 作業車 | |
| JP6937725B2 (ja) | 作業車 | |
| JP6765294B2 (ja) | 油圧ロボット | |
| JP6739387B2 (ja) | 作業車 | |
| JP6899800B2 (ja) | 作業車 | |
| JP6745751B2 (ja) | 作業車 | |
| JP2022093117A (ja) | 作業車 | |
| WO2019131573A1 (ja) | 作業車 | |
| JP6701111B2 (ja) | 作業車 | |
| JP6701112B2 (ja) | 作業車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200512 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200706 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200804 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200901 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6758277 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |