JP6937725B2 - 作業車 - Google Patents
作業車 Download PDFInfo
- Publication number
- JP6937725B2 JP6937725B2 JP2018119982A JP2018119982A JP6937725B2 JP 6937725 B2 JP6937725 B2 JP 6937725B2 JP 2018119982 A JP2018119982 A JP 2018119982A JP 2018119982 A JP2018119982 A JP 2018119982A JP 6937725 B2 JP6937725 B2 JP 6937725B2
- Authority
- JP
- Japan
- Prior art keywords
- link
- vehicle body
- hydraulic
- base
- posture
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Description
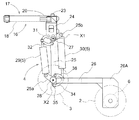
複数(具体的には4つ)の走行車輪2は、屈折リンク機構4を介して車両本体1に対して各別に昇降自在に支持されている。屈折リンク機構4は、旋回機構16を介して縦軸芯Y周りで回動自在に車体フレーム7に支持されている。
図7に、制御ブロック図を示している。制御装置13は、例えば、マイクロコンピュータ等を備えており、制御プログラムに従って種々の制御を実行可能である。図示はしていないが、制御装置13は、複数の油圧モータ6に対する作動油の制御と、旋回シリンダ18に対する作動油の制御も行っている。
(1)上記実施形態では、支持フレーム10に、滑り止め状態で接地する接地支持体10Eを備える構成としたが、この構成に代えて、例えば、左右両側に前後夫々に位置する状態で複数のキャスター輪を備え、キャスター輪により接地支持する構成を採用してもよい。この場合、キャスター輪が自由回動する状態と、回動を規制する状態とに切り換え可能なストッパー部材を備えるとよい。
2 走行車輪
4 屈折リンク機構
5 姿勢変更操作手段
7 基台(車体フレーム)
8 油圧供給源
10 支持フレーム
25 第一リンク
26 第二リンク
29 第一油圧シリンダ
30 第二油圧シリンダ
Claims (4)
- 基台を備えた車両本体と、
前記車両本体の左右両側における前後夫々に位置する複数の走行車輪と、
複数の前記走行車輪を各別に昇降自在に前記車両本体に支持する複数の屈折リンク機構と、
複数の前記屈折リンク機構の姿勢を各別に変更可能な油圧操作式の姿勢変更操作手段と、
前記姿勢変更操作手段に向けて作動油を送り出す油圧供給源と、が備えられ、
前記油圧供給源が、前記車両本体における前記基台の下側に位置する状態で配備され、
前記油圧供給源を支持する支持フレームが、前記基台の下側に位置して前記基台に連結される状態で備えられ、
前記支持フレームは、前記油圧供給源を支持する状態で、車体横方向に沿って移動させることにより、前記基台に対して装着並びに取り外し可能である作業車。 - 前記支持フレームは、下端部が地面に接地した状態で車体全体を姿勢保持可能に構成されている請求項1に記載の作業車。
- 前記油圧供給源が、エンジンと、前記エンジンにより駆動される油圧ポンプとを備えており、前記エンジン及び前記油圧ポンプが平面視で枠状の前記基台と重畳する領域において前記基台よりも下方で前記支持フレームに支持されている請求項1又は2に記載の作業車。
- 前記屈折リンク機構に、一端部が前記基台に横軸芯周りで回動自在に支持された第一リンクと、一端部が前記第一リンクの他端部に横軸芯周りで回動自在に支持され且つ他端部に前記走行車輪が支持された第二リンクと、が備えられ、
前記姿勢変更操作手段に、前記基台に対する前記第一リンクの揺動姿勢を変更可能な第一油圧シリンダと、前記第一リンクに対する前記第二リンクの揺動姿勢を変更可能な第二油圧シリンダと、が備えられている請求項1から3のいずれか1項に記載の作業車。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018119982A JP6937725B2 (ja) | 2018-06-25 | 2018-06-25 | 作業車 |
| CN201980031218.4A CN112119004B (zh) | 2018-06-25 | 2019-06-12 | 作业车 |
| US17/047,807 US11498632B2 (en) | 2018-06-25 | 2019-06-12 | Work vehicle |
| EP19824511.0A EP3812250A4 (en) | 2018-06-25 | 2019-06-12 | WORK VEHICLE |
| PCT/JP2019/023212 WO2020004024A1 (ja) | 2018-06-25 | 2019-06-12 | 作業車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018119982A JP6937725B2 (ja) | 2018-06-25 | 2018-06-25 | 作業車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020001444A JP2020001444A (ja) | 2020-01-09 |
| JP6937725B2 true JP6937725B2 (ja) | 2021-09-22 |
Family
ID=69098228
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018119982A Active JP6937725B2 (ja) | 2018-06-25 | 2018-06-25 | 作業車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6937725B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7450582B2 (ja) | 2021-06-18 | 2024-03-15 | 株式会社クボタ | 作業車 |
-
2018
- 2018-06-25 JP JP2018119982A patent/JP6937725B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020001444A (ja) | 2020-01-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018181459A1 (ja) | 作業車 | |
| CN111247057B (zh) | 作业车 | |
| CN110494349B (zh) | 作业车 | |
| JP6745750B2 (ja) | 作業車 | |
| JP6758278B2 (ja) | 作業車 | |
| JP6899801B2 (ja) | 作業車 | |
| CN112119004B (zh) | 作业车 | |
| JP6843040B2 (ja) | 作業車 | |
| WO2018116642A1 (ja) | 作業車 | |
| JP6899799B2 (ja) | 作業車 | |
| JP6937725B2 (ja) | 作業車 | |
| JP6758277B2 (ja) | 作業車 | |
| JP7117989B2 (ja) | 作業車 | |
| JP6739387B2 (ja) | 作業車 | |
| JP6765294B2 (ja) | 油圧ロボット | |
| JP6745751B2 (ja) | 作業車 | |
| JP6701112B2 (ja) | 作業車 | |
| WO2019131573A1 (ja) | 作業車 | |
| JP6832841B2 (ja) | 作業車 | |
| JP6899800B2 (ja) | 作業車 | |
| JP6701111B2 (ja) | 作業車 | |
| JP6934455B2 (ja) | 作業車 | |
| JP7386782B2 (ja) | 作業車 | |
| US20230415829A1 (en) | Work Vehicle | |
| JP6611697B2 (ja) | 作業車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200624 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210216 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210413 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210518 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210712 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210803 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210831 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6937725 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |