JP6695620B2 - 建設機械 - Google Patents
建設機械 Download PDFInfo
- Publication number
- JP6695620B2 JP6695620B2 JP2015000736A JP2015000736A JP6695620B2 JP 6695620 B2 JP6695620 B2 JP 6695620B2 JP 2015000736 A JP2015000736 A JP 2015000736A JP 2015000736 A JP2015000736 A JP 2015000736A JP 6695620 B2 JP6695620 B2 JP 6695620B2
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- control mode
- command value
- sensitivity
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000010276 construction Methods 0.000 title claims description 15
- 230000007935 neutral effect Effects 0.000 claims description 28
- 230000035945 sensitivity Effects 0.000 claims description 27
- 238000000034 method Methods 0.000 description 15
- 238000010586 diagram Methods 0.000 description 9
- 230000008569 process Effects 0.000 description 9
- 230000007704 transition Effects 0.000 description 7
- 239000010720 hydraulic oil Substances 0.000 description 6
- 238000001514 detection method Methods 0.000 description 5
- 238000009412 basement excavation Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 239000003921 oil Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000010187 selection method Methods 0.000 description 1
Images







Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Operation Control Of Excavators (AREA)
Description
走行体と、
前記走行体に旋回可能に搭載された旋回体と、
前記旋回体に搭載された作業アタッチメントと、
前記作業アタッチメントを駆動するアクチュエータと、
前記作業アタッチメントの操作レバーと
を備え、
前記アクチュエータを制御する複数の制御モードの間で、前記操作レバーの中立位置前後の前記作業アタッチメントの感度が異なっており、
前記作業アタッチメントは、ブーム、アーム、及びエンドアタッチメントを含み、
前記複数の制御モードのうち1つは、前記ブーム、前記アーム、及び前記エンドアタッチメントの少なくとも2つが操作されている状態における制御モードである建設機械が提供される。
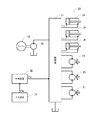
11 旋回機構
12 上部旋回体
13 ブーム
14 ブームシリンダ
15 アーム
16 アームシリンダ
17 バケット
18 バケットシリンダ
19、20、21 油圧モータ
23 アクチュエータ
25 制御弁
30 制御装置
31 入力装置
35 エンジン
36 油圧ポンプ
301 制御モード選択部
302 指令値生成部
303 制御弁駆動部
305 操作量−指令値対応表
310 ペダル
311 操作レバー
312 操作量検出部
314 モード選択スイッチ
CM1 単軸用制御モード
CM2 調整軸用制御モード
CM3 主軸用制御モード
CV 指令値
DZ、DZ1 不感帯
OA 操作量
TZ 遷移帯
Claims (3)
- 走行体と、
前記走行体に旋回可能に搭載された旋回体と、
前記旋回体に搭載された作業アタッチメントと、
前記作業アタッチメントを駆動するアクチュエータと、
前記作業アタッチメントの操作レバーと
を備え、
前記アクチュエータを制御する複数の制御モードの間で、前記操作レバーの中立位置前後の前記作業アタッチメントの感度が異なっており、
前記作業アタッチメントは、ブーム、アーム、及びエンドアタッチメントを含み、
前記複数の制御モードのうち1つは、前記ブーム、前記アーム、及び前記エンドアタッチメントの少なくとも2つが操作されている状態における制御モードである建設機械。 - 走行体と、
前記走行体に旋回可能に搭載された旋回体と、
前記旋回体に搭載された作業アタッチメントと、
前記作業アタッチメントを駆動するアクチュエータと、
前記作業アタッチメントの操作レバーと
を備え、
前記アクチュエータを制御する複数の制御モードの間で、前記操作レバーの中立位置前後の前記作業アタッチメントの感度が異なっており、
前記複数の制御モードのうち1つにおいて、他の制御モードに比べて、前記操作レバーの中立位置前後の前記作業アタッチメントの不感帯が狭くなるまたは無くなる建設機械。 - 前記ブーム、前記アーム、及び前記エンドアタッチメントの少なくとも2つが操作されている状態における制御モードにおいて、前記ブーム、前記アーム、及び前記エンドアタッチメントのうち操作されている1つのアタッチメントが相対的に低い感度で制御され、他のアタッチメントが相対的に高い感度で制御される請求項1に記載の建設機械。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015000736A JP6695620B2 (ja) | 2015-01-06 | 2015-01-06 | 建設機械 |
| CN201610007084.0A CN105756119B (zh) | 2015-01-06 | 2016-01-06 | 施工机械 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015000736A JP6695620B2 (ja) | 2015-01-06 | 2015-01-06 | 建設機械 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016125282A JP2016125282A (ja) | 2016-07-11 |
| JP2016125282A5 JP2016125282A5 (ja) | 2018-02-08 |
| JP6695620B2 true JP6695620B2 (ja) | 2020-05-20 |
Family
ID=56342337
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015000736A Active JP6695620B2 (ja) | 2015-01-06 | 2015-01-06 | 建設機械 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6695620B2 (ja) |
| CN (1) | CN105756119B (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6576757B2 (ja) * | 2015-09-17 | 2019-09-18 | 住友重機械工業株式会社 | ショベル |
| IT201900005234A1 (it) * | 2019-04-05 | 2020-10-05 | Cnh Ind Italia Spa | Procedimento di controllo per l'attuazione di un movimento combinato di un braccio ed un attrezzo in una macchina operatrice, sistema di controllo corrispondente e macchina operatrice comprendente tale sistema di controllo |
| IT201900005212A1 (it) * | 2019-04-05 | 2020-10-05 | Cnh Ind Italia Spa | Procedimento di controllo per l'attuazione di una inversione del movimento di almeno uno tra un braccio ed un attrezzo in una macchina operatrice, sistema di controllo corrispondente e macchina operatrice comprendente tale sistema di controllo |
| IT201900005238A1 (it) * | 2019-04-05 | 2020-10-05 | Cnh Ind Italia Spa | Procedimento di controllo per l'attuazione di un movimento di almeno uno tra un braccio ed un attrezzo collegato al braccio in una macchina operatrice azionata da un motore, sistema di controllo corrispondente e macchina operatrice comprendente tale sistema di controllo |
| CN110409541A (zh) * | 2019-06-19 | 2019-11-05 | 三一重机有限公司 | 一种挖掘机控制方法及系统 |
| IT202000025864A1 (it) * | 2020-10-30 | 2022-04-30 | Cnh Ind Italia Spa | Procedimenti di controllo per azionare il movimento di un braccio o un attrezzo in una macchina operatrice, corrispondenti sistemi di controllo e macchine operatrici comprendenti tali sistemi di controllo |
| CN117062958A (zh) * | 2021-03-31 | 2023-11-14 | 住友建机株式会社 | 施工机械及施工机械用操作装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05195549A (ja) * | 1992-01-20 | 1993-08-03 | Kubota Corp | 土工機における油圧アクチュエータ制御装置 |
| JPH05195559A (ja) * | 1992-01-20 | 1993-08-03 | Kubota Corp | バックホーの油圧制御装置 |
| JP2000145713A (ja) * | 1998-11-09 | 2000-05-26 | Shin Caterpillar Mitsubishi Ltd | 作業機械における吊り作業制御方法、その装置および作業機械 |
| JP2008127957A (ja) * | 2006-11-24 | 2008-06-05 | Shin Caterpillar Mitsubishi Ltd | 作業機械の制御装置 |
| JP5156237B2 (ja) * | 2007-01-24 | 2013-03-06 | 株式会社小松製作所 | 油圧駆動装置及び油圧駆動車両 |
| KR20110071907A (ko) * | 2009-12-22 | 2011-06-29 | 두산인프라코어 주식회사 | 가변적 거동 특성을 이용한 전자식 유압 제어 장치 및 그 방법 |
| JP5667830B2 (ja) * | 2010-10-14 | 2015-02-12 | 日立建機株式会社 | 旋回体を有する建設機械 |
| JP5476286B2 (ja) * | 2010-12-17 | 2014-04-23 | 日立建機株式会社 | 作業機械の操作装置 |
| JP5356423B2 (ja) * | 2011-01-21 | 2013-12-04 | 日立建機株式会社 | 旋回体を有する建設機械 |
| JP5562288B2 (ja) * | 2011-05-25 | 2014-07-30 | 日立建機株式会社 | 建設機械の電動駆動装置 |
| JP5638471B2 (ja) * | 2011-06-13 | 2014-12-10 | 日立建機株式会社 | ハイブリッド式建設機械の制御装置 |
| JP5113946B1 (ja) * | 2012-03-27 | 2013-01-09 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
-
2015
- 2015-01-06 JP JP2015000736A patent/JP6695620B2/ja active Active
-
2016
- 2016-01-06 CN CN201610007084.0A patent/CN105756119B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN105756119A (zh) | 2016-07-13 |
| JP2016125282A (ja) | 2016-07-11 |
| CN105756119B (zh) | 2018-09-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6695620B2 (ja) | 建設機械 | |
| JP5125048B2 (ja) | 作業機械の旋回制御装置 | |
| JP6676827B2 (ja) | 作業機械 | |
| JP4851802B2 (ja) | 建設機械の旋回駆動装置 | |
| EP2461044A1 (en) | Hydraulic drive for construction machine | |
| WO2016174905A1 (ja) | 建設機械の制御装置 | |
| EP3660228B1 (en) | Shovel | |
| KR20130143481A (ko) | 작업 기계의 동력 회생 장치 | |
| JP2009068197A (ja) | 電動旋回式作業機械の旋回制御装置 | |
| JP2010106511A (ja) | 作業機械の旋回制御装置 | |
| JP4437771B2 (ja) | 走行式作業機械のエンジン制御装置 | |
| JP6001162B2 (ja) | 作業機械のエンジン回転数制御装置 | |
| KR101846030B1 (ko) | 건설기계의 어태치먼트 제어장치 | |
| JP4993575B2 (ja) | 作業車両のステアリングシステム | |
| JP2017110721A (ja) | 建設機械の油圧駆動装置 | |
| JPH11324026A (ja) | 建設機械における操作子とアクチュエータ組合せ変更装置および作業モード変更装置 | |
| JP2011106090A (ja) | 油圧作業機 | |
| JP6347977B2 (ja) | ショベル | |
| JPH1037232A (ja) | 2ピースブーム型作業機の操作駆動装置 | |
| CN102700413B (zh) | 工程机械的发动机控制装置 | |
| JP2020076221A (ja) | 建設機械 | |
| JPH05263436A (ja) | 建設機械の自動制御装置 | |
| JP2010285970A (ja) | 作業機械のガバナ調整制御装置 | |
| JP6830725B2 (ja) | ショベル | |
| JP2024089856A (ja) | ショベル |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171219 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181003 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181009 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190409 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190917 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200421 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200421 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6695620 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |