JP6687169B2 - 情報生成装置、情報生成方法、コンピュータプログラムおよび無線通信システム - Google Patents
情報生成装置、情報生成方法、コンピュータプログラムおよび無線通信システム Download PDFInfo
- Publication number
- JP6687169B2 JP6687169B2 JP2019559853A JP2019559853A JP6687169B2 JP 6687169 B2 JP6687169 B2 JP 6687169B2 JP 2019559853 A JP2019559853 A JP 2019559853A JP 2019559853 A JP2019559853 A JP 2019559853A JP 6687169 B2 JP6687169 B2 JP 6687169B2
- Authority
- JP
- Japan
- Prior art keywords
- sensors
- information
- sensor
- display information
- display
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004891 communication Methods 0.000 title claims description 61
- 238000004590 computer program Methods 0.000 title claims description 12
- 238000000034 method Methods 0.000 title description 36
- 238000001514 detection method Methods 0.000 claims description 70
- 238000005259 measurement Methods 0.000 claims description 19
- 238000009434 installation Methods 0.000 claims description 10
- 230000004397 blinking Effects 0.000 claims description 5
- 230000008569 process Effects 0.000 description 27
- 238000012545 processing Methods 0.000 description 17
- 238000010586 diagram Methods 0.000 description 15
- 230000006870 function Effects 0.000 description 14
- 230000005540 biological transmission Effects 0.000 description 9
- 239000000470 constituent Substances 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012935 Averaging Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000000153 supplemental effect Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 230000006855 networking Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images














Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/14—Digital output to display device ; Cooperation and interconnection of the display device with other functional units
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/14—Digital output to display device ; Cooperation and interconnection of the display device with other functional units
- G06F3/1423—Digital output to display device ; Cooperation and interconnection of the display device with other functional units controlling a plurality of local displays, e.g. CRT and flat panel display
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/20—Scenes; Scene-specific elements in augmented reality scenes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/52—Surveillance or monitoring of activities, e.g. for recognising suspicious objects
- G06V20/54—Surveillance or monitoring of activities, e.g. for recognising suspicious objects of traffic, e.g. cars on the road, trains or boats
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/017—Detecting movement of traffic to be counted or controlled identifying vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M11/00—Telephonic communication systems specially adapted for combination with other electrical systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04Q—SELECTING
- H04Q9/00—Arrangements in telecontrol or telemetry systems for selectively calling a substation from a main station, in which substation desired apparatus is selected for applying a control signal thereto or for obtaining measured values therefrom
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/07—Target detection
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2370/00—Aspects of data communication
- G09G2370/02—Networking aspects
- G09G2370/022—Centralised management of display operation, e.g. in a server instead of locally
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2380/00—Specific applications
- G09G2380/10—Automotive applications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04Q—SELECTING
- H04Q2209/00—Arrangements in telecontrol or telemetry systems
- H04Q2209/20—Arrangements in telecontrol or telemetry systems using a distributed architecture
- H04Q2209/25—Arrangements in telecontrol or telemetry systems using a distributed architecture using a mesh network, e.g. a public urban network such as public lighting, bus stops or traffic lights
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04Q—SELECTING
- H04Q2209/00—Arrangements in telecontrol or telemetry systems
- H04Q2209/40—Arrangements in telecontrol or telemetry systems using a wireless architecture
Description
本出願は、2018年2月13日出願の日本出願第2018−022896号に基づく優先権を主張し、前記日本出願に記載された全ての記載内容を援用するものである。
複数のセンサ情報を情報源として、自動車等の車両の運転支援制御に役立つ情報を生成することが望まれている。
[本開示の効果]
最初に本発明の実施形態の概要を列記して説明する。
(1)本発明の一実施形態に係る情報生成装置は、互いに共通する検出対象エリアを持つ複数のセンサの各々から、前記検出対象エリアの計測結果を示すセンサ情報を取得するセンサ情報取得部と、前記センサ情報取得部が取得した前記複数のセンサ情報に基づいて、前記複数のセンサの各々が同一の所定エリアに存在する対象物を検出しているか否かを判断する判断部と、前記判断部の判断結果が肯定的であり、かつ前記複数のセンサが検出した前記対象物が同一の対象物か否かを判断するための所定の条件を満たさない場合に、前記複数のセンサの各々が検出した前記対象物を別個に表示するための第1表示情報を生成し、前記判断結果が肯定的であり、かつ前記所定の条件を満たす場合に、前記第1表示情報の表示態様とは異なる表示態様で前記複数のセンサの各々が検出した前記対象物を表示するための第2表示情報を生成する表示情報生成部とを備える。
このため、上述の情報生成装置と同様の作用および効果を奏することができる。
このため、上述の情報生成装置と同様の作用および効果を奏することができる。
以下、本発明の実施形態について、図面を用いて詳細に説明する。なお、以下で説明する実施形態は、いずれも本発明の好ましい一具体例を示すものである。以下の実施形態で示される数値、形状、材料、構成要素、構成要素の配置位置および接続形態、ステップ、ステップの順序などは、一例であり、本発明を限定する主旨ではない。本発明は、請求の範囲によって特定される。よって、以下の実施形態における構成要素のうち、本発明の最上位概念を示す独立請求項に記載されていない構成要素については、本発明の課題を達成するのに必ずしも必要ではないが、より好ましい形態を構成するものとして説明される。
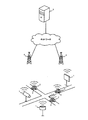
図1は、本発明の実施形態に係る無線通信システムの全体構成図である。
図2は、サーバ5の構成の一例を示すブロック図である。
例えば、路側には、路側センサ1としてミリ波レーダ(以下、「路側ミリ波レーダ」という。)1Mと、カメラ(以下、「路側カメラ」という。)1Cとが設置されているものとする。路側ミリ波レーダ1Mは、検出対象エリア7Mを監視し、検出対象エリア7M内で車両2Iを検出したものとする。一方、路側カメラ1Cは、検出対象エリア7Cを監視し、検出対象エリア7C内で車両2Jを検出したものとする。これにより、センサ情報取得部52は、路側ミリ波レーダ1Mから車両2Iの位置情報を含むセンサ情報を取得し、路側カメラ1Cから車両2Jの位置情報を含むセンサ情報を取得する。なお、図3には、路側センサ1を示しているが、車載センサであってもよい。また、路側センサ1として、LiDARや超音波センサなどを用いてもよい。
図4Bに示す第2表示情報においては、複数のセンサの各々が検出した対象物のうち、いずれか1つの対象物が表示される。つまり、当該第2表示情報では、図4Aの第1表示情報で示された車両2Iおよび車両2Jのうち、車両2Jが選択されて表示される。なお、車両2Iが選択されて表示されてもよい。表示対象の対象物はランダムに選択されてもよいし、以下に説明する基準に従い選択されてもよい。
図6は、車載装置3の構成の一例を示すブロック図である。
1)要求メッセージの送信処理
2)表示情報の受信処理
3)通信パケットの送信処理
(b)マップマッチングによる補正の有無
(c)記憶部35に記憶されている道路地図データの精度
(d)車両2の位置を求める際に用いたGPS衛星の数
(e)GPS受信機32のC/N0(搬送波雑音電力密度比)
(f)GPSクオリティ
(g)PDOP(位置精度低下率)
図7は、路側センサ1の構成の一例を示すブロック図である。
制御部11は、通信パケットにセンサIDを含めて、サーバ5宛に送信する。
図8は、車載装置3、車載カメラ2C、車載ミリ波レーダ2M、路側カメラ1C、路側ミリ波レーダ1M、およびサーバ5の協働により実行される、表示情報の配信処理の一例を示すシーケンス図である。図8に示されるシーケンスを所定間隔(例えば、100msec間隔)で繰り返すことにより、所定間隔で安全運転支援のための機能が選択され、配信される。
表示情報生成処理(図8のステップS9)の詳細について、説明する。
以上説明したように、本発明の実施形態によると、複数のセンサの各々が所定エリアに存在する対象物を検出している場合に、所定条件を満たす場合と満たさない場合とで、対象物の表示態様を変化させることができる。例えば、複数の対象物が異なる対象物である場合に複数の対象物を別個に表示させ、複数の対象物が同一の対象物である場合に、上記表示とは異なる表示態様で複数の対象物を表示させることができる。これにより、複数の対象物が異なる対象物と判断されたのか、同一の対象物と判断されたのかの別をユーザは知ることができる。これにより、複数のセンサ情報から、適切な表示情報を生成することができる。
なお、上述した実施形態では、センサが検出した対象物の位置に制限を設けていなかったが、対象物の位置に制限を設けるようにしてもよい。
図10に示す車載カメラの検出範囲、車載ミリ波レーダの検出範囲および車載LiDARの検出範囲は、各センサによる対象物の検出精度が高い範囲を示している。つまり、各センサは、検出範囲外の対象物も検出可能ではあるが、検出範囲外では対象物の検出精度が低い。なお、図10に示す検出範囲は一例であり、各センサの検出精度により変化する。たとえば、4Kの車載カメラに比べ8Kの車載カメラの方が検出範囲は広くなることが想定される。
各センサから、検出対象エリアの計測結果を示すセンサ情報を取得するセンサ情報取得部と、
上記センサ情報取得部が取得した上記センサ情報に基づいて、複数のセンサの各々が同一の所定エリアに存在する対象物を検出しているか否かを判断する判断部と、
上記判断部の判断結果が肯定的であり、かつ上記複数のセンサが検出した上記対象物が同一の対象物か否かを判断するための所定の条件を満たさない場合に、上記複数のセンサの各々が検出した上記対象物を別個に表示するための第1表示情報を生成し、上記判断結果が肯定的であり、かつ上記所定の条件を満たす場合に、上記第1表示情報の表示態様とは異なる表示態様で上記複数のセンサの各々が検出した上記対象物を表示するための第2表示情報を生成する表示情報生成部と、を備え、
上記第2表示情報は、上記複数のセンサの各々が検出した上記対象物を上記第1表示情報で示された対象物と異なる色で表示するための情報を含む、情報生成装置。
1C 路側カメラ
1M 路側ミリ波レーダ
2 車両
2C 車載カメラ
2I 車両
2J 車両
2K 車両
2L 車両
2M 車載ミリ波レーダ
2N 車両
3 車載装置
4 基地局
5 サーバ
6 歩行者
7C 検出対象エリア
7M 検出対象エリア
8 エリア
11 制御部
12 記憶部
13 カメラ
14 ミリ波レーダ
15 通信部
31 制御部
31A 表示情報取得部
31B 表示制御部
32 GPS受信機
33 車速センサ
34 ジャイロセンサ
35 記憶部
36 ディスプレイ
37 スピーカ
38 入力デバイス
39 カメラ
40 ミリ波レーダ
41 通信部
51 制御部
52 センサ情報取得部
53 判断部
54 表示情報生成部
55 ROM
56 RAM
57 記憶部
58 通信部
Claims (22)
- 互いに共通する検出対象エリアを持つ複数のセンサの各々から、前記検出対象エリアの計測結果を示すセンサ情報を取得するセンサ情報取得部と、
前記センサ情報取得部が取得した前記複数のセンサ情報に基づいて、前記複数のセンサの各々が同一の所定エリアに存在する対象物を検出しているか否かを判断する判断部と、
前記判断部の判断結果が肯定的であり、かつ前記複数のセンサが検出した前記対象物が同一の対象物か否かを判断するための所定の条件を満たさない場合に、前記複数のセンサの各々が検出した前記対象物を別個に表示するための第1表示情報を生成し、前記判断結果が肯定的であり、かつ前記所定の条件を満たす場合に、前記第1表示情報の表示態様とは異なる表示態様で前記複数のセンサの各々が検出した前記対象物を表示するための第2表示情報を生成する表示情報生成部と
を備える情報生成装置。 - 前記複数のセンサの一つから得られたセンサ情報に基づく対象物の位置から所定距離内のエリアを前記所定エリアとする
請求項1に記載の情報生成装置。 - 前記第2表示情報は、前記複数のセンサの各々が検出した前記対象物のうち、いずれか1つの前記対象物を表示するための情報を含む
請求項1又は請求項2に記載の情報生成装置。 - 前記表示情報生成部は、前記複数のセンサの種別に基づいて、いずれか1つの前記対象物を選択することにより、選択した前記対象物を表示するための前記第2表示情報を生成する
請求項3に記載の情報生成装置。 - 前記表示情報生成部は、前記複数のセンサの設置対象に基づいて、いずれか1つの前記対象物を選択することにより、選択した前記対象物を表示するための前記第2表示情報を生成する
請求項3に記載の情報生成装置。 - 前記表示情報生成部は、前記各センサから当該各センサが検出した前記対象物までの距離に基づいて、いずれか1つの前記対象物を選択することにより、選択した前記対象物を表示するための前記第2表示情報を生成する
請求項3に記載の情報生成装置。 - 前記第2表示情報は、前記複数のセンサの各々が検出した前記対象物を統合した対象物を表示するための情報を含む
請求項1又は請求項2に記載の情報生成装置。 - 前記第2表示情報は、前記複数のセンサの各々が検出した前記対象物を点滅させて表示するための情報を含む
請求項1又は請求項2に記載の情報生成装置。 - 前記第2表示情報は、前記複数のセンサの各々が検出した前記対象物の平均の位置に1つの対象物を表示するための情報を含む
請求項1又は請求項2に記載の情報生成装置。 - 前記所定の条件は、前記複数のセンサが検出した前記対象物の位置に基づく条件を含む
請求項1〜請求項9のいずれか1項に記載の情報生成装置。 - 前記所定の条件は、前記複数のセンサが過去の所定時刻において検出した前記対象物間の距離が所定の距離閾値以下であることを含む
請求項10に記載の情報生成装置。 - 前記所定の条件は、前記複数のセンサが検出した前記対象物の方向の差が所定の角度閾値以下であることを含む
請求項1〜請求項11のいずれか1項に記載の情報生成装置。 - 前記所定の条件は、前記複数のセンサが検出した前記対象物の速度の差が所定の速度閾値以下であることを含む
請求項1〜請求項12のいずれか1項に記載の情報生成装置。 - 前記各閾値は、前記複数のセンサの種別に基づいて定められる
請求項11〜請求項13のいずれか1項に記載の情報生成装置。 - 前記各閾値は、前記複数のセンサの設置対象に基づいて定められる
請求項11〜請求項13のいずれか1項に記載の情報生成装置。 - 前記各閾値は、前記複数のセンサの検出精度に基づいて定められる
請求項11〜請求項13のいずれか1項に記載の情報生成装置。 - 前記各閾値は、前記複数のセンサの位置精度に基づいて定められる
請求項11〜請求項13のいずれか1項に記載の情報生成装置。 - 前記所定の条件は、前記複数のセンサが検出した前記対象物のサイズ、色および形状のうちの少なくとも1つに基づく条件を含む
請求項1〜請求項17のいずれか1項に記載の情報生成装置。 - 前記判断部は、前記各センサと当該各センサが検出した前記対象物との位置関係に基づいて、検出した当該対象物を判断対象とするか否かを決定する
請求項1〜請求項18のいずれか1項に記載の情報生成装置。 - 互いに共通する検出対象エリアを持つ複数のセンサの各々から、前記検出対象エリアの計測結果を示すセンサ情報を取得するステップと、
取得された前記複数のセンサ情報に基づいて、前記複数のセンサの各々が同一の所定エリアに存在する対象物を検出しているか否かを判断するステップと、
前記判断するステップにおける判断結果が肯定的であり、かつ前記複数のセンサが検出した前記対象物が同一の対象物か否かを判断するための所定の条件を満たさない場合に、前記複数のセンサの各々が検出した前記対象物を別個に表示するための第1表示情報を生成し、前記判断結果が肯定的であり、かつ前記所定の条件を満たす場合に、前記第1表示情報の表示態様とは異なる表示態様で前記複数のセンサの各々が検出した前記対象物を表示するための第2表示情報を生成するステップと
を含む情報生成方法。 - コンピュータを、
互いに共通する検出対象エリアを持つ複数のセンサの各々から、検出対象エリアの計測結果を示すセンサ情報を取得するセンサ情報取得部、
前記センサ情報取得部が取得した前記複数のセンサ情報に基づいて、前記複数のセンサの各々が同一の所定エリアに存在する対象物を検出しているか否かを判断する判断部、及び
前記判断部の判断結果が肯定的であり、かつ前記複数のセンサが検出した前記対象物が同一の対象物か否かを判断するための所定の条件を満たさない場合に、前記複数のセンサの各々が検出した前記対象物を別個に表示するための第1表示情報を生成し、前記判断結果が肯定的であり、かつ前記所定の条件を満たす場合に、前記第1表示情報の表示態様とは異なる表示態様で前記複数のセンサの各々が検出した前記対象物を表示するための第2表示情報を生成する表示情報生成部
として機能させるためのコンピュータプログラム。 - 請求項1〜請求項19のいずれか1項に記載の情報生成装置と、
前記情報生成装置とネットワークを介して接続される車載装置とを備え、
前記車載装置は、
前記情報生成装置から、当該情報生成装置が生成した前記第1表示情報および第2表示情報のうちの少なくとも1つの表示情報を取得する表示情報取得部と、
前記表示情報取得部が取得した前記表示情報に基づく画面への表示を制御する表示制御部とを含む、
無線通信システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018022896 | 2018-02-13 | ||
| JP2018022896 | 2018-02-13 | ||
| PCT/JP2018/044111 WO2019159494A1 (ja) | 2018-02-13 | 2018-11-30 | 情報生成装置、情報生成方法、コンピュータプログラムおよび車載装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6687169B2 true JP6687169B2 (ja) | 2020-04-22 |
| JPWO2019159494A1 JPWO2019159494A1 (ja) | 2020-05-28 |
Family
ID=67619888
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019559853A Active JP6687169B2 (ja) | 2018-02-13 | 2018-11-30 | 情報生成装置、情報生成方法、コンピュータプログラムおよび無線通信システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11010612B2 (ja) |
| JP (1) | JP6687169B2 (ja) |
| CN (1) | CN111699523B (ja) |
| DE (1) | DE112018007073T5 (ja) |
| WO (1) | WO2019159494A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111971579A (zh) * | 2018-03-30 | 2020-11-20 | 三菱电机株式会社 | 物体辨识装置 |
| JP7044000B2 (ja) * | 2018-07-20 | 2022-03-30 | 株式会社デンソー | 車両制御装置および車両制御方法 |
| US11808843B2 (en) * | 2019-08-29 | 2023-11-07 | Qualcomm Incorporated | Radar repeaters for non-line-of-sight target detection |
| US11067638B2 (en) | 2019-12-12 | 2021-07-20 | Sma Solar Technology Ag | Method of and system for detecting a serial arc fault in a power circuit |
| JP7342753B2 (ja) * | 2020-03-18 | 2023-09-12 | 株式会社デンソー | 車両用位置特定装置及び車両用位置特定方法 |
| JP7474689B2 (ja) | 2020-12-04 | 2024-04-25 | 日産自動車株式会社 | 物体検出方法及び物体検出装置 |
| CN114338585A (zh) * | 2021-11-30 | 2022-04-12 | 青岛海尔科技有限公司 | 消息推送方法、装置、存储介质及电子装置 |
| JP7214024B1 (ja) | 2022-03-09 | 2023-01-27 | 三菱電機株式会社 | 物体位置検出装置 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3923200B2 (ja) | 1998-10-23 | 2007-05-30 | 本田技研工業株式会社 | 車両の障害物検知方法 |
| JP4534846B2 (ja) | 2005-04-13 | 2010-09-01 | トヨタ自動車株式会社 | 物体検出装置 |
| JP4426535B2 (ja) * | 2006-01-17 | 2010-03-03 | 本田技研工業株式会社 | 車両の周辺監視装置 |
| EP2216764A4 (en) * | 2007-12-05 | 2012-07-25 | Bosch Corp | VEHICLE INFORMATION DISPLAY DEVICE |
| JP4881898B2 (ja) | 2008-02-27 | 2012-02-22 | 日本電信電話株式会社 | センサ情報の表示制御装置およびその方法、プログラム、記録媒体 |
| US8305444B2 (en) * | 2008-11-14 | 2012-11-06 | Toyota Motor Engineering & Manufacturing North America, Inc. | Integrated visual display system |
| JP5669767B2 (ja) * | 2011-12-13 | 2015-02-18 | トヨタ自動車株式会社 | 情報提供装置 |
| EP2746137B1 (en) * | 2012-12-19 | 2019-02-20 | Volvo Car Corporation | Method and system for assisting a driver |
| JP5812061B2 (ja) * | 2013-08-22 | 2015-11-11 | 株式会社デンソー | 物標検出装置およびプログラム |
| US10037469B2 (en) * | 2013-12-10 | 2018-07-31 | Google Llc | Image location through large object detection |
| JP6330160B2 (ja) * | 2014-05-09 | 2018-05-30 | 本田技研工業株式会社 | 物体認識装置 |
| JP6028766B2 (ja) * | 2014-05-20 | 2016-11-16 | 株式会社デンソー | 運転支援表示装置 |
| DE102015108759A1 (de) * | 2015-06-03 | 2016-12-08 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Klassifizieren eines länglich ausgedehnten stationären Objektes in einem seitlichen Umgebungsbereich eines Kraftfahrzeugs, Fahrerassistenzsystem sowie Kraftfahrzeug |
| EP3330742A4 (en) * | 2015-07-27 | 2018-08-08 | Nissan Motor Co., Ltd. | Object detecting method and object detecting device |
| KR20170058188A (ko) * | 2015-11-18 | 2017-05-26 | 엘지전자 주식회사 | 차량 운전 보조장치 및 이를 포함하는 차량 |
| JP6493365B2 (ja) * | 2016-05-19 | 2019-04-03 | 株式会社デンソー | 車両制御装置、車両制御方法 |
| JP6625932B2 (ja) * | 2016-05-31 | 2019-12-25 | 株式会社東芝 | 監視装置及び監視システム |
| JP2017083477A (ja) * | 2017-02-07 | 2017-05-18 | パイオニア株式会社 | 表示制御方法、プログラムおよび表示装置 |
-
2018
- 2018-11-30 JP JP2019559853A patent/JP6687169B2/ja active Active
- 2018-11-30 DE DE112018007073.5T patent/DE112018007073T5/de active Pending
- 2018-11-30 CN CN201880089011.8A patent/CN111699523B/zh active Active
- 2018-11-30 US US16/625,240 patent/US11010612B2/en active Active
- 2018-11-30 WO PCT/JP2018/044111 patent/WO2019159494A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| CN111699523A (zh) | 2020-09-22 |
| CN111699523B (zh) | 2022-07-05 |
| US11010612B2 (en) | 2021-05-18 |
| JPWO2019159494A1 (ja) | 2020-05-28 |
| DE112018007073T5 (de) | 2020-11-12 |
| US20200143167A1 (en) | 2020-05-07 |
| WO2019159494A1 (ja) | 2019-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6687169B2 (ja) | 情報生成装置、情報生成方法、コンピュータプログラムおよび無線通信システム | |
| US11308807B2 (en) | Roadside device, communication system, and danger detection method | |
| US11039384B2 (en) | Wireless communication system, information acquiring terminal, computer program, method for determining whether to adopt provided information | |
| US20200005644A1 (en) | Information providing system, server, mobile terminal, and computer program | |
| US10531254B2 (en) | Millimeter wave vehicle-to-vehicle communication system for data sharing | |
| US11683684B2 (en) | Obtaining a credential for V2X transmission on behalf of a vehicle | |
| WO2017145650A1 (ja) | 車載機及び道路異常警告システム | |
| US11682300B2 (en) | Techniques for utilizing a mobile device as a proxy for a vehicle | |
| US20210014643A1 (en) | Communication control device, communication control method, and computer program | |
| US11511767B2 (en) | Techniques for utilizing CV2X registration data | |
| JP2006279859A (ja) | 移動体移動実態情報提供システム、位置情報収集装置、カーナビ装置および移動体移動実態情報提供方法 | |
| JP6375772B2 (ja) | 通報システム、情報処理システム、サーバ装置、端末装置、及びプログラム | |
| WO2019131075A1 (ja) | 送信装置、点群データ収集システムおよびコンピュータプログラム | |
| JP2019203823A (ja) | 走行計画生成装置、走行計画生成方法、及び制御プログラム | |
| JP2020027645A (ja) | サーバ、無線通信方法、コンピュータプログラム、及び車載装置 | |
| JP6903598B2 (ja) | 情報処理装置、情報処理方法、情報処理プログラム、および移動体 | |
| KR101850254B1 (ko) | 커넥티드 카 환경을 지원하기 위한 차량간 통신 시스템 | |
| JP2019079453A (ja) | 情報生成システム、情報生成装置、情報生成方法およびコンピュータプログラム | |
| JP2020091614A (ja) | 情報提供システム、サーバ、移動端末、及びコンピュータプログラム | |
| JP2019079454A (ja) | 車両制御システム、機能通知装置、機能通知方法およびコンピュータプログラム | |
| WO2014002485A1 (ja) | 無線装置 | |
| JP6536445B2 (ja) | 車両用通信制御装置 | |
| JP2020091612A (ja) | 情報提供システム、サーバ、及びコンピュータプログラム | |
| WO2023176587A1 (ja) | 交通通信システム、第1の端末、プログラム、及び通信方法 | |
| JP2020098532A (ja) | 動的情報生成装置、車載装置、動的情報生成方法およびコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20191030 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191030 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20191030 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20191128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20200121 Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200303 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200316 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6687169 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |