以下に添付図面を参照して開示の技術に係るモータ制御装置の実施形態の一例について説明する。以下の実施形態は、周期的な負荷トルク変動を有する圧縮機を駆動するモータのトルク制御を、位置センサレスベクトル制御により行う、例えば空気調和装置又は低温保存装置等のモータ制御装置に関する。しかし、開示の技術は、周期的な負荷トルク変動を有する負荷を駆動するモータのトルク制御を行うモータ制御装置に広く適用可能である。
なお、以下に示す実施形態は、開示の技術を限定するものではない。また、以下に示す実施形態及びその変形例は、矛盾しない範囲で適宜組み合わせることができる。また、以下に示す実施形態は、開示の技術に係る構成及び処理について主に示し、その他の構成及び処理の説明を簡略又は省略する。また、各実施形態において、同一の構成及び処理には同一の符号を付与し、既出の構成及び処理の説明は省略する。
なお、以下の実施形態で用いる記号の説明の一覧を、下記(表1)に示す。
実施形態の説明に先立ち、開示の技術の背景及び概略について説明する。dq回転座標系のd軸及びq軸で独立した出力電圧指令を生成するトルク制御では、負荷トルク変動を抑制するために出力電圧振幅に脈動を生じさせる脈動電圧を生成する。よって、脈動電圧を生成するトルク制御方式は、出力電圧を調整できる通常制御領域では適用できるが、出力電圧が飽和して電圧調整ができない電圧飽和領域では、脈動電圧が生成できない。
そこで、以下の実施形態では、電圧飽和領域のように出力電圧が飽和している領域であっても調整可能なパラメータである出力電圧の位相(電圧ベクトル角(δ角))を電圧飽和領域において調整する。以下の実施形態では、電圧飽和領域の場合は、電圧ベクトル角を調整することにより、モータの回転速度を制御する、電圧飽和領域のトルク制御を行い、電圧飽和領域以外の通常領域の場合は、通常領域のトルク制御を行う。
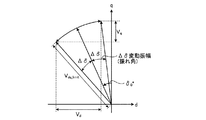
図1Aは、モータに印加される電圧ベクトルの概略を示す図である。図4を参照して図1Aを説明すると、平均電圧ベクトル角指令値(目標値)δ0 *に補正電圧ベクトル角(トルク制御量)Δδを加算して電圧ベクトル角を調整してトルク制御を行う。補正電圧ベクトル角Δδは、周期的トルク変動による機械角推定角速度変動(略して、速度変動という)Δωmと同期して変動する(図1B参照)。平均電圧ベクトル角指令値(目標値)δ0 *は、補正電圧ベクトル角Δδで補正した補正後電圧ベクトル角指令値(目標値)δ*からd軸電圧指令値Vd *及びq軸電圧指令値Vq *を生成する。生成されたこれら指令値をもとにモータを制御することにより、機械角推定角速度変動Δωmの振幅(速度変動振幅|Δωm|)が抑制され、モータのピーク電流を低減する。
この実現のため、まず、機械角指令角速度(目標値)ωm *と現在の角速度を推定した機械角推定角速度ωmとの偏差から、d軸電流指令値(目標値)Id0 *を生成する。そして、d軸電流指令値Id0 *とd軸電流値Idの偏差から、平均電圧ベクトル角指令値δ0 *を生成する。平均電圧ベクトル角指令値δ0 *に補正電圧ベクトル角(トルク制御量)Δδを加算し、補正後電圧ベクトル角指令値(目標値)δ*を生成する。
そして、補正後電圧ベクトル角指令値(目標値)δ*と、出力電圧振幅限界値Vdq_limitから、d軸電圧指令値Vd *及びq軸電圧指令値Vq0 *を生成する。出力電圧振幅限界値Vdq_limitは、IPM(Intelligent Power Module)35に外部(例えば、図示しない電源コンバータ)から供給される直流電圧Vdcを制御系であるdq回転座標軸系における電圧値に変換し、直流電圧Vdcに重畳しているリップルの影響のない最大値(リップル電圧のボトム値)に設定する。そして、2相(dq回転座標系)から3相(3相静止座標系)への変換及びPWM(Pulse Width Modulation)変調を経て交流電圧がモータに印加された際に、機械角推定角速度ωmが一定に保たれるように平均電圧ベクトル角指令値δ0 *が調整される。
次に、周期的なトルク変動によって生じる機械角推定角速度変動Δωmを補正電圧ベクトル角Δδを重畳することにより抑制する手法について述べる。先ず、機械角推定角速度変動Δωmの基本波成分の振幅及び位相をフーリエ変換等により抽出する。
図1Bは、機械角推定角速度変動Δωm及び補正電圧ベクトル角(トルク制御量)Δδの時系列変化の概略を示す図である。図1Bに示す機械角推定角速度ωmは、機械角指令角速度(目標値)ωm *を中心に機械角推定角速度変動Δωm分脈動していることを示している。速度変動修正位相φωiは、機械角周期毎に取得される速度変動成分の位相を修正したものである。電圧ベクトル角(トルク制御量)δは、平均電圧ベクトル角指令値(目標値)δ0 *を中心に補正電圧ベクトル角(トルク制御量)Δδ分脈動していることを示し、補正電圧ベクトル角(トルク制御量)Δδは機械角推定角速度変動Δωmと同期し、機械角推定角速度変動Δωmよりもシフト位相θshiftだけ進み又は遅れ位相で補正電圧ベクトル角Δδを周期的に変動させることで生成する。なお、シフト位相θshiftが0である場合、補正電圧ベクトル角Δδは、機械角推定角速度変動Δωmと同位相である。補正電圧ベクトル角Δδは、機械角推定角速度変動Δωmと同期して機械角周期毎に変動させるものであり、その際シフト位相θshiftを設けることで制振効果が向上する。
補正電圧ベクトル角Δδの変動振幅は、図1Bで示すと平均電圧ベクトル角指令値(目標値)δ0 *を中心に補正電圧ベクトル角(トルク制御量)Δδの脈動する振幅であり、図1Aでは、平均電圧ベクトル角指令値(目標値)δ0 *を中心に補正電圧ベクトル角(トルク制御量)Δδの振れ角をいう。この補正電圧ベクトル角Δδの変動振幅は、フーリエ変換等により得られた機械角推定角速度変動Δωmの基本波振幅(速度変動振幅|Δωm|)と振動が許容される機械角推定角速度変動Δωmの範囲を示す速度変動許容値|Δωm|*との偏差の積分制御により生成される。これにより、速度変動振幅|Δωm|の帰還ループが形成されるため、補正電圧ベクトル角Δδの変動振幅を固定値として設定せずとも、機械角推定角速度変動Δωmと同期して変動し、負荷の状態に応じた適切な値となる。
また、補正電圧ベクトル角Δδを調整する際に、速度変動振幅|Δωm|をフィードバックする方法の他に、q軸電流の変動位相をフィードバックすることで補正電圧ベクトル角Δδの変動振幅を生成する方法がある。q軸電流の変動位相をフィードバックする方法でも、速度変動振幅|Δωm|をフィードバックする方法と同様に、制振効果及びモータのピーク電流低減効果を得ることができる。
ここで、q軸電流の変動位相をフィードバックする方法では、速度変動位相から負荷トルク変動位相を推定し、負荷トルク変動位相とq軸電流の変動位相が同位相となるように補正電圧ベクトル角Δδを調整する。q軸電流の変動はマグネットトルクの変動と同位相であるため、負荷トルク変動位相とマグネットトルクの変動位相を一致させることでモータのピーク電流低減効果と制振効果を得ることができる。
さて、上記のように、通常領域のdq回転座標系のd軸及びq軸の出力電圧指令を生成するトルク制御は、負荷トルク変動を抑制するための出力電圧振幅に脈動を生じさせる脈動電圧を生成する。よって、脈動電圧を生成するトルク制御方式は、出力電圧の調整が可能な通常領域では適用できるが、出力電圧が飽和して電圧調整ができない電圧飽和領域では、適用することができない。すなわち、通常領域で駆動できる回転数は、低回転域から脈動電圧のピーク値が出力限界値に到達する回転数までである。このときの出力電圧の波形の概略は、図2Aの制御状態Aに相当する部分である。図2Aは、従来技術に係る出力電圧制御の概略を示す図である。
また、上記のように、図1A及び図1Bに示すdq回転座標系のd軸及びq軸の出力電圧指令を生成するトルク制御は、出力電圧を出力限界値に保持した状態としているため、回転数制御が安定して成立するのは、図3Aで示すように、電流ベクトルが最大トルク/電流制御曲線よりも左側の領域に存在するいわゆる弱め磁束領域であり、高回転域から弱め磁束制御が解除される回転数までである。このときの出力電圧波形の概略は、図2Aの制御状態Cに相当する部分である。最大トルク/電流制御は、同一トルクを発生させる電流ベクトルのうちで、電流振幅を最小にする制御で、電流ベクトル平面上で、定トルク曲線に対して原点からの距離が最短になる点に電流ベクトルを制御する。最大トルク/電流制御曲線とは、図3A及び図3Bに示す曲線のことで、各電流において出力可能な最大トルクを示す定電流円と定トルク曲線の接点をつなげた曲線である。
ここで、最大トルク/電流制御時(図2Aの制御状態A)の脈動出力電圧のピーク値が出力電圧振幅限界値に達した時点で電圧飽和領域となり、補正電圧ベクトル角を用いる弱め磁束制御(図2Aの制御状態C)へ移行すると、最大トルク/電流制御時の出力電圧平均値が急激に出力電圧振幅限界値へと変化するため、制御的に不連続となってしまい、脱調や過電流保護停止等に陥る。
そこで、これら制御状態Aと制御状態Cをスムーズにつなぐには、脈動出力電圧のピーク値が出力電圧振幅限界値を超えたところからの飽和電圧領域のうち弱め磁束制御領域(図2Aの制御状態C)に到達するまでは電流ベクトルが最大トルク/電流制御曲線をトレースするように、負荷トルク変動に対する出力電圧を脈動させないで、電圧ベクトル角と出力電圧振幅を調整することが望ましい。このときの出力電圧波形の概略は、図2Bの制御状態Bに相当する部分である。図2Bは、実施形態に係る出力電圧制御の概略を示す図である。
すなわち、図2Bに示すように、制御状態を制御状態Aから制御状態B、制御状態Bから制御状態Cへと移行する制御を補正電圧ベクトル角Δδを用いる弱め磁束制御アルゴリズムで実現するためには、図3A及び図3Bで示すように電流ベクトルが最大トルク/電流制御曲線の左側領域に存在するときは出力電圧振幅を増加させ、電流ベクトルが最大トルク/電流制御曲線の右側領域に存在するときは出力電圧振幅を減少させれば、モータの電流ベクトルが最大トルク/電流制御曲線上の値に近付くようになる。
例えば、図3A及び図3Bに示すように、現在のq軸電流Iqから最大トルク/電流制御曲線上のd軸電流Id’を算出し、現在のd軸電流Idとの偏差がなくなるようにPI(Portion Integral)制御等により出力電圧振幅を調整することで実現することができる。図3Aは、最大トルク/電流制御曲線の左側領域の概略を示す図である。図3Bは、最大トルク/電流制御曲線の右側領域の概略を示す図である。図3Aでは、現在の電流ベクトルPが最大トルク/電流制御曲線の左側領域にあり、出力電圧振幅を増大させると電流ベクトルは大きくなってP1に移動する。この時のd軸電流と最大トルク/電流制御曲線上のId”と偏差が小さくなることが分かる。ここでは、d軸電流Idを固定した状態で説明が分かりやすいようにしている。また、図3Bでは、現在の電流ベクトルPが最大トルク/電流制御曲線の右側領域にあり、出力電圧振幅を減少させると電流ベクトルは小さくなってP1に移動する。この時のd軸電流と最大トルク/電流制御曲線上のId”と偏差が小さくなることが分かる。
ここで、図2Bの制御領域Aにおいて出力電圧振幅が増加し、脈動電圧のピーク値が出力電圧振幅限界値を超えると見込まれる場合に、通常領域でトルク変動を補正するための脈動電圧が出力電圧振幅限界値を超えてしまうために生成できない電圧飽和領域(図2Bの制御状態B、C)では、補正電圧ベクトル角Δδを用いてトルク補正を行う。また、制御状態Bにおいて、負荷トルク変動に対する出力電圧を脈動させないで最大トルク/電流制御を実現させ、効率の向上やモータの安定駆動が可能となる。
なお、制御状態を制御状態Aから制御状態Bへ移行させる際、脈動する出力電圧のピーク値が出力電圧振幅限界値を超えると見込まれる場合に、出力電圧を平均出力電圧(すなわち脈動の振幅中心)にして、出力電圧を脈動させないかわりに補正電圧ベクトル角Δδを用いてトルク補正を行うことで、スムーズな制御状態の遷移を行うことができる。また、制御状態を制御状態Bから制御状態Aへ移行させる際、制御状態Aの推定される出力電圧のピーク値が出力電圧振幅限界値を下回ると見込まれる場合に、出力電圧振幅を、脈動する出力電圧の平均出力電圧になるところで制御状態Aに移行させることで、スムーズな状態遷移を行うことができる。
[実施形態1]
実施形態1では、通常領域の制御状態Aを後述の通常領域制御部b1の制御によってなされ、脈動電圧に基づくd軸電圧指令値Vd *及びq軸電圧指令値Vq *により負荷トルク変動を抑制する。また、電圧飽和領域の制御状態B、Cを後述の電圧飽和領域制御部b2の制御によってなされ、平均電圧ベクトル角指令値(目標値)δ0 *を中心に補正電圧ベクトル角Δδを脈動させて負荷トルク変動を抑制する。なお、電圧飽和領域の制御状態Bにおいて、出力電圧を脈動させないで最大トルク/電流制御を行い、制御状態Cは、制御状態Bにおいて出力電圧が出力電圧振幅限界値Vdq_limitに達すると、出力電圧は出力電圧振幅限界値Vdq_limitとして制御状態Cの弱め磁束領域の制御に移行する。
(実施形態1に係るモータ制御装置)
図4は、実施形態1に係るモータ制御装置100を示すブロック図である。実施形態1は、弱め磁束制御領域等の出力電圧が制限される電圧飽和領域において、速度変動振幅|Δωm|をフィードバックして、振動が実用上問題とならない速度変動許容値|Δωm|*となるように補正電圧ベクトル角Δδを機械角周期毎に調整する。
実施形態1に係るモータ制御装置100は、例えば永久磁石同期電動機(PMSM:Permanent Magnet Synchronous Motor)であるモータ10を制御する。モータ制御装置100は、減算器11を有する。また、モータ制御装置100は、速度制御部12、励磁電流制御部13、補正q軸電流生成部14、補正d軸電流生成部15、加算器16,17、減算器18,19、d軸電流制御部20、q軸電流制御部21、非干渉化制御部22、減算器23、加算器24を含む通常領域制御部b1を有する。なお、通常領域制御部b1は、周期的に変動する脈動電圧の電圧指令値を生成する第1の電圧生成部の一例である。
また、モータ制御装置100は、補正電圧ベクトル角生成部25、速度制御部26、減算器27、電流制御部28、加算器29、d軸q軸電圧生成部30、出力電圧調整部31を含む電圧飽和領域制御部b2を有する。なお、電圧飽和領域制御部b2は、電圧ベクトル角指令値及び補正電圧ベクトル角を加算した補正後電圧ベクトル角指令値と、出力電圧指令値とから、電圧指令値を生成する第2の電圧生成部の一例である。また、モータ制御装置100は、切替部32、d−q/u,v,w変換部33、PWM(Pulse Width Modulation)変調部34、IPM(Intelligent Power Module)35を有する。また、モータ制御装置100は、電流センサ36,37、3φ電流算出部38、u,v,w/d−q変換部39、軸誤差演算処理部40、PLL(Phase Lock Loop)制御部41、位置推定部42、1/Pn処理部43を有する。
減算器11は、モータ制御装置100へ入力された機械角指令角速度ωm *から、1/Pn処理部41により出力された推定された現在の角速度である機械角推定角速度ωmを減算した角速度偏差Δωを、速度制御部12,26へ出力する。
速度制御部12は、減算器11からの角速度偏差Δωを小さくするようなq軸電流指令値(目標値)Iq0 *を生成し、励磁電流制御部13、加算器16へ出力する。励磁電流制御部13は、速度制御部12からのq軸電流指令値(目標値)Iq0 *から最大トルク/電流制御曲線よりd軸電流指令値Id0 *を生成し、加算器17に出力する。
補正q軸電流生成部14は、1/Pn処理部43により出力された機械角推定角速度ωm、位置推定部42により出力された機械角位相θmから補正q軸電流ΔIqを生成し、加算器16に出力する。補正d軸電流生成部15は、u,v,w/d−q変換部39により出力されたd軸電流値Id、位置推定部42により出力された機械角位相θmから補正d軸電流ΔIdを生成し、加算器17に出力する。
加算器16は、速度制御部12により出力されたq軸電流指令値Iq0 *と、補正q軸電流生成部14から出力された補正q軸電流ΔIqとを加算し、補正後q軸電流指令値(目標値)Iq *を生成する。加算器17は、励磁電流制御部13により出力されたd軸電流指令値Id0 *と、補正d軸電流生成部15により出力された補正d軸電流ΔIdと加算し、補正後d軸電流指令値Id *を生成する。
減算器18は、加算器17により出力されたd軸電流指令値Id *から、u,v,w/d−q変換部39により出力されたd軸電流値Idを減算した偏差を出力する。減算器19は、加算器16により出力された補正q軸電流指令値Id *から、u,v,w/d−q変換部39により出力されたq軸電流値Iqを減算した偏差を出力する。
d軸電流制御部20は、減算器18により出力された偏差からd軸電圧指令値Vd **を生成する。q軸電流制御部21は、減算器19により出力された偏差からq軸電圧指令値Vq **を生成する。
非干渉化制御部22は、u,v,w/d−q変換部39により出力されたq軸電流値Iq、PLL制御部41により出力された電気角推定角速度ωeから、d軸電圧指令値Vd **を非干渉化するためのd軸非干渉化補正値Vdaを生成し、出力する。また、非干渉化制御部22は、u,v,w/d−q変換部39により出力されたd軸電流値Id、PLL制御部41により出力された電気角推定角速度ωeから、q軸電圧指令値Vq **を非干渉化するためのq軸非干渉化補正値Vqaを生成し、出力する。
減算器23は、d軸電流制御部20により出力されたd軸電圧指令値Vd **から、非干渉化制御部22により出力されたd軸非干渉化補正値Vdaを減算し、d軸電圧指令値Vd **を非干渉化したd軸電圧指令値Vd *を生成し、出力する。加算器24は、q軸電流制御部21により出力されたq軸電圧指令値Vq **と、非干渉化制御部22により出力されたq軸非干渉化補正値Vqaとを加算し、q軸電圧指令値Vq **を非干渉化したq軸電圧指令値Vq *を生成し、出力する。
補正電圧ベクトル角生成部25は、1/Pn処理部43により出力された機械角推定角速度ωm、位置推定部42により出力された機械角位相θm、u,v,w/d−q変換部39により出力されたq軸電流値Iq等から、補正電圧ベクトル角Δδを生成する。補正電圧ベクトル角生成部25の処理の詳細は、後述する。
速度制御部26は、減算器11からの入力を目標角速度へ制御するd軸電流指令値(目標値)Id0 *を出力する。減算器27は、速度制御部26により出力されたd軸電流指令値Id0 *から、u,v,w/d−q変換部39により出力されたd軸電流値Idを減算したd軸電流偏差を、電流制御部28へ出力する。電流制御部28は、減算器27からの入力をもとに、d軸電流が目標値となるように制御する平均電圧ベクトル角指令値δ0 *を出力する。
加算器29は、電流制御部28により出力された平均電圧ベクトル角指令値δ0 *と、補正電圧ベクトル角生成部25により出力された補正電圧ベクトル角Δδとを加算した補正後電圧ベクトル角指令値δ*を、d軸q軸電圧生成部30へ出力する。d軸q軸電圧生成部30は、補正後電圧ベクトル角指令値δ*と、出力電圧調整部31により出力された出力電圧指令値(目標値)Vdq_outからd軸電圧指令値Vd *及びq軸電圧指令値Vq *を生成し、切替部32へ出力する。
出力電圧調整部31は、インバータが出力可能な最大出力電圧である出力電圧振幅限界値Vdq_limit、u,v,w/d−q変換部39により出力されたd軸電流値Id及びq軸電流値Iqから、下記(1−1)式及び下記(1−2)式により出力電圧指令値Vdq_outを生成し、脈動を含まない直流電圧である出力電圧指令値を出力する。なお、出力電圧調整部31は、出力電圧指令値Vdq_outを出力する際に、下記(2)式による出力電圧指令値Vdq_outのリミット処理を行う。なお、下記(1−1)式におけるLdはd軸インダクタンス、Lqはq軸インダクタンス、ψaは電機子鎖交磁束、Kpは比例ゲイン定数、Kiは積分ゲイン定数である。
出力電圧調整部31は、上記(1−1)式及び(1−2)式により、d軸電流値Id及びq軸電流値Iqが最大トルク/電流曲線上をトレースするよう出力電圧指令値Vdq_outを制御することにより、最大トルク/電流制御を実現する。また、出力電圧調整部31の出力が出力電圧振幅限界値Vdq_limitに到達した際に出力電圧指令値Vdq_outを出力電圧振幅限界値Vdq_limitで押さえ込むことにより、平均電圧ベクトル角指令値δ0 *の調整のみによる弱め磁束制御へスムーズに遷移させることができる。なお、出力電圧調整部31は、モータ10の電流ベクトルが最大トルク/電流制御曲線上の値となるような出力電圧指令値を生成する出力電圧指令値生成部の一例である。
切替部32は、通常領域制御部b1から出力されたd軸電圧指令値Vd *及びq軸電圧指令値Vq *、又は、電圧飽和領域制御部b2から出力されたd軸電圧指令値Vd *及びq軸電圧指令値Vq *のいずれかのd軸電圧指令値Vd *及びq軸電圧指令値Vq *の組に切り替え、d−q/u,v,w変換部33及び軸誤差演算処理部40へ出力する。切替部32の処理の詳細は、後述する。
d−q/u,v,w変換部33は、位置推定部27により出力された現在のロータの位置である電気角位相(dq軸位相)θeから、切替部32により出力された2相のd軸電圧指令値Vd *及びq軸電圧指令値Vq *を3相のU相出力電圧指令値Vu *,V相出力電圧指令値VV *,W相出力電圧指令値VW *へ変換する。そして、d−q/u,v,w変換部33は、U相出力電圧指令値Vu *,V相出力電圧指令値VV *,W相出力電圧指令値VW *をPWM変調部34へ出力する。PWM変調部34は、U相出力電圧指令値Vu *,V相出力電圧指令値VV *,W相出力電圧指令値VW *と、PWMキャリア信号から、6相のPWM信号を生成し、IPM35へ出力する。
IPM35は、PWM変調部34により出力された6相のPWM信号をもとに、モータ10のU相,V相,W相それぞれへ印可する交流電圧を外部から供給される直流電圧Vdcから変換して生成し、それぞれの交流電圧をモータ10のU相,V相,W相へ印加する。
電流を計測する方式は、母線電流を計測する1シャント(shunt)方式に限らず、2つのCT(Current Transformer)で、例えば、電流センサ36でモータ10のU相の電流を、電流センサ37でモータ10のV相の電流を計測してもよい。3φ電流算出部38は、1シャント方式で母線電流を計測した場合、PWM変調部34から出力された6相PWMスイッチング情報と、計測された母線電流から、モータ10のU相電流値Iu,V相電流値Iv,W相電流値Iwを算出する。または、2つのCTで相電流を計測した場合、残りのW相電流値Iwは、Iu+Iv+Iw=0の関係より算出する。算出した各相の相電流値Iu,Iv,Iwをu,v,w/d−q変換部39へ出力する。
u,v,w/d−q変換部39は、位置推定部42により出力された電気角位相θeをもとに、3φ電流算出部38により出力された3相のU相電流値Iu,V相電流値Iv,W相電流値Iwを、2相のd軸電流値Id及びq軸電流値Iqへ変換する。そして、u,v,w/d−q変換部39は、d軸電流値Idを補正d軸電流生成部15、減算器18,27へ、q軸電流値Iqを減算器19、補正電圧ベクトル角生成部25へ、d軸電流値Id及びq軸電流値Iqを非干渉化制御部22、出力電圧調整部31、切替部32、軸誤差演算処理部40へそれぞれ出力する。
軸誤差演算処理部40は、切替部32により出力されたd軸電圧指令値Vd *及びq軸電圧指令値Vq *、u,v,w/d−q変換部39により出力されたd軸電流値Id及びq軸電流値Iqから、軸誤差Δθを算出し、PLL制御部41へ出力する。
PLL制御部41は、軸誤差演算処理部40により出力された軸誤差Δθから、推定された現在の角速度である電気角推定角速度ωeを算出し、非干渉化制御部22、切替部32、位置推定部42、1/Pn処理部43それぞれへ出力する。位置推定部42は、PLL制御部41により出力された電気角推定角速度ωeから、電気角位相(dq軸位相)θe及び機械角位相θmを算出する。そして、位置推定部42は、機械角位相θmを補正q軸電流生成部14、補正d軸電流生成部15、補正電圧ベクトル角生成部25へ、電気角位相θeをd−q/u,v,w変換部33及びu,v,w/d−q変換部39へそれぞれ出力する。
1/Pn処理部43は、PLL制御部41により出力された電気角推定角速度ωeをモータ10の極対数Pnで除算して機械角推定角速度ωmを算出した機械角推定角速度ωmを、減算器11、補正q軸電流生成部14、補正電圧ベクトル角生成部25それぞれへ出力する。
(実施形態1に係る切替部)
図5は、実施形態1に係るモータ制御装置100の切替部32を示すブロック図である。なお、図5では、通常領域制御部b1から切替部32へ入力されるd軸電圧指令値Vd *及びq軸電圧指令値Vq *を、d軸電圧指令値Vd *1及びq軸電圧指令値Vq *1と表記する。また、図5では、電圧飽和領域制御部b2から切替部32へ入力されるd軸電圧指令値Vd *及びq軸電圧指令値Vq *を、d軸電圧指令値Vd *2及びq軸電圧指令値Vq *2と表記する。
切替部32は、電圧振幅算出部32a、想定電圧算出部32b、制御状態切替判定部32c、電圧指令値入力切替部32dを有する。電圧振幅算出部32aは、下記(3)式に基づき、d軸電圧指令値Vd *1及びq軸電圧指令値Vq *1から出力電圧振幅Voutを算出する。
想定電圧算出部32bは、PLL制御部41により出力された電気角推定角速度ωe、u,v,w/d−q変換部39により出力されたd軸電流値Id及びq軸電流値Iq、モータ10のモータパラメータ(抵抗値R、d軸インダクタンスLd、q軸インダクタンスLq、電機子鎖交磁束ψa)を用いた電圧方程式により求めたd軸電圧Vd、q軸電圧Vqから、通常領域のトルク制御方式(以下、通常制御方式と呼ぶ)を行った場合の出力電圧振幅推定値Vout’を推定する。
制御状態切替判定部32cは、現在の制御方式が通常制御方式である場合に、電圧振幅算出部32aで算出された出力電圧振幅Voutのピーク値と、出力電圧振幅限界値Vdq_limitとの比較を行い、Vout(ピーク値)>出力電圧振幅限界値Vdq_limitである場合には、制御方式を電圧飽和領域のトルク制御方式(以下、電圧飽和領域制御方式と呼ぶ)へ切り替える。制御状態切替判定部32cは、現在の制御方式が通常制御方式であるが、Vout(ピーク値)≦出力電圧振幅限界値Vdq_limitの場合には、制御方式を現在の制御方式である通常制御方式に維持する。そして、制御状態切替判定部32cは、判定の結果、決定した制御方式をSELECT信号のHigh/Low信号にて電圧指令値入力切替部32dへ通知する。
また、制御状態切替判定部32cは、現在の制御方式が電圧飽和領域制御方式である場合に、想定電圧算出部32bで算出された出力電圧振幅推定値Vout’のピーク値と、出力電圧振幅限界値Vdq_limitとの比較を行い、出力電圧振幅限界値Vdq_limit>Vout’(ピーク値)である場合には、制御方式を通常制御方式へ切り替える。制御状態切替判定部32cは、現在の制御方式が電圧飽和領域制御方式であるが、出力電圧振幅限界値Vdq_limit≦Vout’(ピーク値)の場合には、制御方式を現在の制御方式である電圧飽和領域制御方式に維持する。そして、制御状態切替判定部32cは、判定の結果、決定した制御方式をSELECT信号にて電圧指令値入力切替部32dへ通知する。
電圧指令値入力切替部32dは、制御状態切替判定部32cから受信したSELECT信号が通常制御方式を示す場合(例えばLow信号)は、通常領域制御部b1から切替部32へ入力されるd軸電圧指令値Vd *1及びq軸電圧指令値Vq *1を選択してd軸電圧指令値Vd *及びq軸電圧指令値Vq *として出力する。また、電圧指令値入力切替部32dは、制御状態切替判定部32cから受信したSELECT信号が電圧飽和領域制御方式を示す場合(例えばHigh信号)は、電圧飽和領域制御部b2から切替部32へ入力されるd軸電圧指令値Vd *2及びq軸電圧指令値Vq *2を選択してd軸電圧指令値Vd *及びq軸電圧指令値Vq *として出力する。
(実施形態1に係る補正電圧ベクトル角生成部)
図6は、実施形態1に係る補正電圧ベクトル角生成部25を示すブロック図である。実施形態1に係る補正電圧ベクトル角生成部25は、速度変動成分分離部25a、速度変動振幅算出部25b、減算器25c、補正電圧ベクトル角振幅算出部25d、速度変動位相修正部25e、補正電圧ベクトル角算出部25fを有する。
速度変動成分分離部25aは、下記(4−1)式及び(4−2)式により、機械角周期毎に、機械角推定角速度変動Δωmの基本波成分を、直交成分である2つのフーリエ係数ωsin(速度変動のsin成分)及びωcos(速度変動のcos成分)に分離する。基本波成分のフーリエ係数を機械角周期毎に算出することで、速度変動の高調波成分を排除した速度変動基本波成分を、精度よく抽出することができる。
速度変動振幅算出部25bは、下記(5)式により、速度変動成分分離部25aにより算出されたフーリエ係数ωsin(速度変動のsin成分)及びωcos(速度変動のcos成分)から、機械角推定角速度変動Δωmの基本波成分の振幅(速度変動振幅|Δωm|)を算出する。なお、フーリエ係数ωsin(速度変動のsin成分)及びωcos(速度変動のcos成分)は機械角周期毎に更新される値であるため、速度変動振幅|Δωm|も機械角周期毎に更新される。
減算器25cは、速度変動振幅算出部25bにより算出された速度変動振幅|Δωm|から速度変動許容値|Δωm|*を減算した偏差を、補正電圧ベクトル角振幅算出部25dへ出力する。補正電圧ベクトル角振幅算出部25dは、例えば下記(6)式を用いて補正電圧ベクトル角振幅|Δδ|を累積する積分制御により、速度変動振幅|Δωm|と速度変動許容値|Δωm|*の偏差に応じて、補正電圧ベクトル角振幅|Δδ|を機械角周期毎に算出する。なお、速度変動許容値|Δωm|*は、振動が許容できる範囲での速度変動振幅を規定する。
なお、上記(6)式における“k”は、補正電圧ベクトル角振幅|Δδ|の変化量を決める補正ゲインである。この値“k”を適切に設定することで、速度変動が速度変動許容値境界でハンチングする問題や、急激な負荷トルク変化によって速度変動が速度変動許容値よりも大きくなり振動や騒音が発生するという問題を抑制することができる。
速度変動位相修正部25eは、機械角周期毎に取得される速度変動成分の位相を修正する。修正方法は、例えば、速度変動のsin成分(ωsin)及びcos成分(ωcos)をそれぞれ補正ゲイン“k”を適用した下記(7−1)式〜(7−2)式を用いて速度変動成分のsin成分(ωsin)及びcos成分(ωcos)をそれぞれ累積する積分制御する。そして、速度変動位相修正部25eは、下記(7−3)式により、下記(7−1)式〜(7−2)式により算出した速度変動のsin成分(ωsin)及びcos成分(ωcos)の積分結果であるωsin_i及びωcos_iからωcos_i/ωsin_iの逆正接を演算する。速度変動位相修正部75eは、ωcos_i/ωsin_iの逆正接から、速度変動修正位相φωiを得る。
なお、速度変動位相修正部25eは、速度変動位相算出後において積分演算後の直交成分ωsin_i及びωcos_iにより形成されるベクトルの位相が変化しないように、下記(8−1)式及び(8−2)式により、振幅を丸めこむ(以下、位相フィルタ処理とする)。この処理によって、それぞれの直交成分ωsin_i及びωcos_iの積分値が発散しないようにする。ここで、下記(8−1)式及び(8−2)式における“A”は、位相の修正速度や安定性を決定するためのベクトルの振幅であり、いわば位相フィルタである。
補正電圧ベクトル角算出部25fは、下記(9)式により、補正電圧ベクトル角Δδを算出する。補正電圧ベクトル角Δδは、機械角位相θmにおける補正電圧ベクトル角Δδを、速度変動修正位相φωiと、速度変動修正位相φωiに対して補正電圧ベクトル角Δδの変動位相差を設定するシフト位相θshiftだけ進ませた又は遅れさせた位相における瞬時値となる。なお、ここで、下記(9)式におけるシフト位相θshiftは、制振効果やモータ10の電流ピーク値の低減度合いから調整されるものであり、0として機械角推定角速度変動Δωmと同位相で補正電圧ベクトル角Δδを生成しても効果を得ることができる。また、シフト位相θshiftが、補正電圧ベクトル角Δδの位相を進ませるものである場合は、平均電圧ベクトル角指令値δ0 *に対して先行して電圧ベクトル角の補正を行うことができ、補正の応答性能が向上する場合がある。
(実施形態1に係る電圧制御方式切替処理)
図7は、実施形態1に係る電圧制御方式切替処理を示すフローチャートである。先ず、切替部32(図4、図5参照)は、現在の制御方式が通常制御方式であるか否かを判定する(ステップS11)。切替部32は、現在の制御方式が通常制御方式である場合(ステップS11:Yes)、ステップS12へ処理を移す。一方、切替部32は、現在の制御方式が電圧飽和領域制御方式である場合(ステップS11:No)、ステップS15へ処理を移す。
ステップS12では、切替部32は、上記(3)式に基づき、d軸電圧指令値Vd *1及びq軸電圧指令値Vq *1から出力電圧振幅Voutを算出する。次に、ステップS13では、切替部32は、出力電圧振幅Voutのピーク値Vout(ピーク値)>出力電圧振幅限界値Vdq_limitであるか否かを判定する。切替部32は、Vout(ピーク値)>出力電圧振幅限界値Vdq_limitである場合(ステップS13:Yes)、ステップS14へ処理を移す。一方、切替部32は、Vout(ピーク値)≦出力電圧振幅限界値Vdq_limitである場合(ステップS13:No)、電圧制御方式切替処理を終了する。ステップS14では、切替部32は、制御方式を電圧飽和領域制御方式に切り替える。ステップS14が終了すると、切替部32は、電圧制御方式切替処理を終了する。
ステップS15では、切替部32は、電気角推定角速度ωe、d軸電流値Id、q軸電流値Iq及び、モータ10のモータパラメータ(抵抗値R、d軸インダクタンスLd、q軸インダクタンスLq、電機子鎖交磁束ψa)を用いた電圧方程式により求めたd軸電圧Vd、q軸電圧Vqから通常制御方式を行った場合の出力電圧振幅推定値Vout’を推定する。次に、切替部32は、出力電圧振幅推定値Vout’のピーク値と、出力電圧振幅限界値Vdq_limitとの比較を行う(ステップS16)。切替部32は、出力電圧振幅限界値Vdq_limit>Vout’(ピーク値)である場合(ステップS16:Yes)、ステップS17へ処理を移す。一方、切替部32は、出力電圧振幅限界値Vdq_limit≦Vout’(ピーク値)である場合(ステップS16:No)、電圧制御方式切替処理を終了する。ステップS17では、切替部32は、制御方式を通常制御方式に切り替える。ステップS17が終了すると、切替部32は、電圧制御方式切替処理を終了する。
実施形態1は、電圧飽和領域における出力電圧指令値Vdq_outが出力電圧振幅限界値Vdq_limitに達して弱め磁束領域へ至るまでの制御領域と、通常領域との間の制御領域において、出力電圧を概ね直流化した状態で変化させることで最大トルク/電流制御を実施する。よって、実施形態1は、補正電圧ベクトル角Δδを用いる負荷トルク制御を実施した状態を最大トルク/電流制御領域まで拡張することが可能となり、制振を行うと共に、モータ効率を向上させ、脱調等に至ることなく安定してモータを駆動することができる。
[実施形態2]
実施形態2では、弱め磁束制御領域等の出力電圧が飽和した電圧飽和領域における補正電圧ベクトル角の生成を、実施形態1の速度変動と速度変動許容値との速度変動偏差に代えて、q軸電流の変動位相偏差で生成する。そして、実施形態2では、マグネットトルク(q軸電流によるトルク)の位相が負荷トルク変動位相と同位相となるように補正電圧ベクトル角の振幅及び位相を機械角周期毎に調整する。
(実施形態2に係る補正電圧ベクトル角生成部)
図8は、実施形態2に係る補正電圧ベクトル角生成部25−2を示すブロック図である。実施形態2に係るモータ制御装置100−2は、補正電圧ベクトル角生成部25−2を有する(図4参照)。実施形態2に係る補正電圧ベクトル角生成部25−2は、速度変動成分分離部25a−2、速度変動位相修正部25b−2、q軸電流目標変動位相算出部25c−2、q軸電流成分分離部25d−2、q軸電流変動位相算出部25e−2、減算器25f−2を有する。また、補正電圧ベクトル角生成部25−2は、位相偏差正規化処理部25g−2、補正電圧ベクトル角振幅算出部25h−2、補正電圧ベクトル角算出部25i−2を有する。
速度変動成分分離部25a−2は、実施形態1の速度変動成分分離部25aと同様に、上記(4−1)式及び(4−2)式により、機械角周期毎に、機械角推定角速度変動Δωmの基本波成分を直交成分である2つのフーリエ係数ωsin(速度変動のsin成分)及びωcos(速度変動のcos成分)に分離する。
速度変動位相修正部25b−2は、実施形態1に係る速度変動位相修正部25eと同様に、上記(7−1)式〜(7−3)式により、速度変動修正位相φωiを算出する。また、速度変動位相修正部25b−2は、実施形態1に係る速度変動位相修正部25eと同様に、上記(8−1)式〜(8−2)式により、位相フィルタ処理を行う。
q軸電流目標変動位相算出部25c−2は、下記(10)式により、q軸電流の目標変動位相θIq *を算出する。ここで、速度変動を抑制するためのq軸電流の変動位相(マグネットトルクの変動位相)は、速度変動位相に対してπ/2だけ遅れた位相となる。
q軸電流成分分離部25d−2は、下記(11−1)式及び(11−2)式により、機械角周期毎に、q軸電流値Iqの基本波成分を直交成分である2つのフーリエ係数Iq_sin(q軸電流のsin成分)及びIq_cos(q軸電流のcos成分)に分離する。基本波成分のフーリエ係数を機械角周期毎に算出することで、q軸電流変動の高調波成分を排除したq軸電流基本波成分を、精度よく抽出することができる。
q軸電流変動位相算出部25e−2は、下記(12)式により、機械角周期毎に取得されるq軸電流変動成分の位相θIqを算出する。
減算器25f−2は、下記(13)式により、q軸電流の目標変動位相θIq *からq軸電流変動成分の位相θIqを減算した位相偏差θIq_err’を算出する。
位相偏差正規化処理部25g−2は、例えば、下記(14)式により、位相偏差θIq_err’を所定の位相範囲に正規化処理した位相偏差θIq_errを算出する。正規化処理は、位相に対して積分制御を適用する際に発生する次の不都合を回避するためのものである。例えば、位相偏差が+π/2[rad]と−3π/2[rad]では、ベクトルとしては同位相であるが、積分制御を実施する場合、増加方向への変化と減少方向への変化といった具合に、調整対象の変化方向と大きさが異なる。この不都合を回避するために、下記(14)式のように、例えば、−3π/2[rad]を+π/2[rad]とするように、位相を−π[rad]〜+π[rad]の範囲に正規化する。
補正電圧ベクトル角振幅算出部25h−2は、例えば、下記(15)式により、位相偏差θIq_errに応じて補正電圧ベクトル角振幅|Δδ|を機械角周期毎に調整する。補正電圧ベクトル角振幅算出部15h−2は、例えば、下記(15)式による積分制御を行う。なお、下記(15)式における“k”は、上記(6)式における“k”と同様である。
補正電圧ベクトル角算出部25i−2は、実施形態1に係る補正電圧ベクトル角算出部25fと同様に、上記(9)式により、補正電圧ベクトル角Δδを算出する。
実施形態2は、q軸電流の変動位相をフィードバックして、マグネットトルク(q軸電流によるトルク)の位相が負荷トルク変動位相と同位相となるように補正電圧ベクトル角の振幅及び位相を機械角周期毎に調整する。よって、実施形態2によれば、マグネットトルクの位相が最適化されるため、速度変動振幅及びモータのピーク電流が抑制される。
[実施形態3]
実施形態2では、ピーク電流の低減効果が得られるように、q軸電流変動位相が速度変動に対してπ/2だけ遅れた位相となるように補正電圧ベクトル角を制御している。
そこで、実施形態3では、弱め磁束制御領域等の出力電圧が飽和した電圧飽和領域において、速度変動振幅|Δωm|をフィードバックする実施形態1と、q軸電流変動位相をフィードバックする実施形態2を切り替えて用いる。そして、実施形態3では、実施形態2の制御方式を実行中に速度変動振幅|Δωm|が速度変動許容値|Δωm|*を上回るときに、実施形態1の制御方式に切り替えて動作させることで、制振効果を優先させることができる。
また、実施形態3では、実施形態1の制御方式を実行中にq軸電流変動位相θIqがq軸電流目標変動位相θIq *より遅れた場合に、実施形態2の制御方式に切り替えて動作する。
(実施形態3に係る補正電圧ベクトル角生成部)
図9は、実施形態3に係る補正電圧ベクトル角生成部25−3を示すブロック図である。実施形態3に係るモータ制御装置100−3は、補正電圧ベクトル角生成部25−3を有する(図4参照)。補正電圧ベクトル角生成部25−3は、速度変動成分分離部25a−3、速度変動振幅算出部25b−3、減算器25c−3、速度変動位相修正部25d−3、q軸電流目標変動位相算出部25e−3、q軸電流成分分離部25f−3を有する。また、補正電圧ベクトル角生成部25−3は、q軸電流変動位相算出部25g−3、減算器25h−3、位相偏差正規化処理部25i−3を有する。また、補正電圧ベクトル角生成部25−3は、補正電圧ベクトル角制御方式切替処理部25j−3、補正電圧ベクトル角振幅算出部25k−3、補正電圧ベクトル角算出部25l−3を有する。
速度変動成分分離部25a−3、速度変動振幅算出部25b−3、減算器25c−3、補正電圧ベクトル角振幅算出部25k−3、補正電圧ベクトル角算出部25l−3を含む構成は、実施形態1に係る補正電圧ベクトル角生成部25(図6参照)と同様の機能を有する。速度変動成分分離部25a−3、速度変動位相修正部25d−3、q軸電流目標変動位相算出部25e−3、q軸電流成分分離部25f−3、q軸電流変動位相算出部25g−3、減算器25h−3、位相偏差正規化処理部25i−3、補正電圧ベクトル角振幅算出部25k−3、補正電圧ベクトル角算出部25l−3を含む構成は、実施形態2に係る補正電圧ベクトル角生成部25−2(図8参照)と同様の機能を有する。
補正電圧ベクトル角制御方式切替処理部25j−3は、機械角周期毎に、下記(16)式により、減算器25c−3が算出した、速度変動振幅|Δωm|から速度変動許容値|Δωm|*を減算した偏差|Δωm|_errが入力される。
また、補正電圧ベクトル角制御方式切替処理部25j−3は、機械角周期毎に、上記(13)式及び(14)式により算出された位相偏差θIq_errが入力される。
そして、補正電圧ベクトル角制御方式切替処理部25j−3は、現在の補正電圧ベクトル角制御方式がq軸電流変動位相フィードバック方式の時、下記(17−1)式が成立する、つまり速度変動振幅|Δωm|が速度変動許容値|Δωm|*よりも大きい場合に、補正電圧ベクトル角制御方式を速度変動振幅フィードバック方式へ切り換える。なお、補正電圧ベクトル角制御方式切替処理部25j−3は、現在の補正電圧ベクトル角制御方式がq軸電流変動位相フィードバック方式の時、下記(17−1)式が成立しない場合には、現在の補正電圧ベクトル角制御方式であるq軸電流変動位相フィードバック方式を継続する。
また、補正電圧ベクトル角制御方式切替処理部25j−3は、現在の補正電圧ベクトル角制御方式が速度変動振幅フィードバック方式の時、下記(17−2)式が成立する、つまりq軸電流変動成分の位相θIqがq軸電流の目標変動位相θIq *よりも遅れている場合に、補正電圧ベクトル角制御方式をq軸電流変動位相フィードバック方式へ切り換える。なお、補正電圧ベクトル角制御方式切替処理部25j−3は、現在の補正電圧ベクトル角制御方式が速度変動振幅フィードバック方式の時、下記(17−2)式が成立しない場合には、現在の補正電圧ベクトル角制御方式である速度変動振幅フィードバック方式を継続する。
そして、補正電圧ベクトル角制御方式切替処理部25j−3は、決定したフィードバック方式をCONTROL_TYPE信号で補正電圧ベクトル角振幅算出部25k−3へ通知する。補正電圧ベクトル角振幅算出部25k−3は、通知されたCONTROL_TYPE信号がq軸電流変動位相フィードバック方式を示す場合には、下記(18−1)式により、位相偏差θIq_errの比例積分制御を行って、補正電圧ベクトル角振幅|Δδ|を機械角周期毎に調整する。
また、補正電圧ベクトル角振幅算出部25k−3は、通知されたCONTROL_TYPE信号が速度変動振幅フィードバック方式を示す場合には、下記(18−2)式により、偏差|Δωm|_errの比例積分制御を行って、補正電圧ベクトル角振幅|Δδ|を機械角周期毎に調整する。
そして、補正電圧ベクトル角算出部25l−3は、機械角位相θm、シフト位相θshift、、補正電圧ベクトル角振幅算出部25k−3により算出された補正電圧ベクトル角振幅|Δδ|、速度変動位相修正部25d−3により算出された速度変動修正位相φωiから、上記(9)式により、補正電圧ベクトル角Δδを算出する。なお、シフト位相θshiftは、速度変動修正位相φωiに対する補正電圧ベクトル角Δδの位相である。
実施形態3は、補正電圧ベクトル角振幅|Δδ|を、q軸電流変動位相フィードバック方式で生成しているとき速度変動振幅|Δωm|に応じて速度変動振幅フィードバック方式に切り替え、速度変動振幅フィードバック方式で生成しているときq軸電流変動位相θIqに応じてq軸電流変動位相フィードバック方式に切り替えて選択することで、速度変動振幅及びモータのピーク電流をより適切に抑制することができる。
上記の実施形態では、シングルロータリーコンプレッサやツインロータリーコンプレッサ等の圧縮機に用いるIPMモータを制御対象とし、モータに流れる電流から角速度及び回転角度をセンサレス方式で推定する構成とする。しかし、開示の技術は、ロータの回転位置をセンサ(エンコーダ)で直接検出する構成において、実施形態において説明した制振制御を行うことにより、周期的な回転速度変動を抑制することができる。
上記の実施形態における各処理の一部を公知の方法で行うことができる場合がある。また、上記の実施形態における各処理を示すフローチャートにおいて、最終結果へ影響を与えない(つまり最終結果が同一である)限りにおいて処理途中のステップの実行順序を入れ替える、もしくは、ステップを並行して実行することができる。この他、上記及び図示の具体的名称、処理手順、制御手順、各種のデータやパラメータを含む情報については、一例を示すに過ぎず、特記する場合を除いて適宜変更することができる。
開示の技術のより広範な態様は、上記のように表しかつ記述した特定の詳細及び代表的な実施形態に限定されるものではない。したがって、添付の特許請求の範囲及びその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。