発明を実施するための形態(実施形態)につき、図面を参照しつつ詳細に説明する。以下の実施形態に記載した内容により本発明が限定されるものではない。また、以下に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能である。
[第一の実施形態]
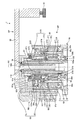
図1は、第一の実施形態に係るアクチュエータ1の断面図である。図2は、アクチュエータ1の上面図である。図3は、アーム部APを上昇させた状態を示す図である。図4は、回転軸AXと直交するモータ部MPの断面図である。
図1に示すように、アクチュエータ1は、例えば、ピックアンドプレース装置として用いられる。アクチュエータ1は、ワークを移送するアーム部APと、アーム部APを駆動するモータ部MPと、を有する。アーム部APは、例えば、単一のアーム80のみを有する片持ちのアーム部である。アーム80の先端部には、ワークを保持するチャック部81が設けられている。アクチュエータ1は、例えば、アーム部APの回転軸AXを鉛直方向に向けて図示略の支持台に固定されている。アクチュエータ1は、アーム部APを鉛直方向(直動方向)に移動させてワークを持ち上げ、アーム部APを水平面内で回転させてワークを所望の位置に移送する。
モータ部MPは、ステータ10と、第一のロータ20と、第二のロータ30と、ハウジング90と、第一の回転センサー101と、第二の回転センサー102と、を有する。ステータ10、第一のロータ20および第二のロータ30は、回転軸AXを中心として、互いに同軸に配置されている。ステータ10は、第一のロータ20と第二のロータ30との間に配置されている。例えば、第一のロータ20は、ステータ10の径方向内側に配置され、ステータ10に対して相対回転する。第二のロータ30は、ステータ10の径方向外側に配置され、ステータ10に対して相対回転する。
ステータ10は、ステータコア11と、第一の励磁コイル12と、第二の励磁コイル13と、を有する。図4に示すように、ステータ10は、回転軸AXの周りに筒状に設けられている。ステータコア11は、筒状のバックヨーク15と、バックヨーク15の径方向内側に配置された複数の第一のティース14と、バックヨーク15の径方向外側に配置された複数の第二のティース16と、を有する。
複数の第一のティース14は、バックヨーク15の内周に沿って並んでいる。複数の第一のティース14は、それぞれ第一の接続部14aを介してバックヨーク15と接続されている。第一の励磁コイル12は、第一の接続部14aの周りに巻き回されている。第一の励磁コイル12は、第一のドライバ121と電気的に接続されている。第一のドライバ121は、第一の励磁コイル12に第一の駆動電流I1を供給することにより、第一のロータ20を駆動する。
第一の励磁コイル12を励磁させて得られる回転磁界は、例えば3相である。第一の励磁コイル12には、駆動信号の位相が120°ずつずれたU相用、V相用およびW相用の励磁コイルが含まれる。しかし、回転磁界の相数は3相に限られない。回転磁界の相数は、例えば、2相でもよいし、4相以上でもよい。
複数の第二のティース16は、バックヨーク15の外周に沿って並んでいる。複数の第二のティース16は、それぞれ第二の接続部16aを介してバックヨーク15と接続されている。第二の励磁コイル13は、第二の接続部16aの周りに巻き回されている。第二の励磁コイル13は、第二のドライバ122と電気的に接続されている。第二のドライバ122は、第二の励磁コイル13に第二の駆動電流I2を供給することにより、第二のロータ30を駆動する。
第二の励磁コイル13を励磁させて得られる回転磁界は、例えば3相である。第二の励磁コイル13には、駆動信号の位相が120°ずつずれたU相用、V相用およびW相用の励磁コイルが含まれる。しかし、回転磁界の相数は3相に限られない。回転磁界の相数は、例えば、2相でもよいし、4相以上でもよい。
第一のドライバ121と第二のドライバ122は、コントローラー120と電気的に接続されている。コントローラー120は、第一のドライバ121と第二のドライバ122とを同期して制御する。コントローラー120は、第一の駆動電流I1の電流量と第二の駆動電流I2の電流量とを独立に制御する。第一の駆動電流I1の電流量によって、第一のロータ20の回転角が制御される。第二の駆動電流I2の電流量によって、第二のロータ30の回転角が制御される。コントローラー120は、第一のロータ20の回転角と第二のロータ30の回転角とを独立に制御する。
図1に示すように、ハウジング90は、第一のハウジング部91と、第二のハウジング部92と、を有する。第一のハウジング部91および第二のハウジング部92は、回転軸AXを中心軸とする環状の構造体である。第一のハウジング部91は、ステータ10のアーム部AP側に設けられている。第二のハウジング部92は、ステータ10のアーム部AP側とは反対側に配置されている。
第一のハウジング部91は、筒状部91aと、第一の突起部91bと、を有する。筒状部91aは、回転軸AXの周りに筒状に設けられている。第一の突起部91bは、筒状部91aのアーム部AP側とは反対側の端部からバックヨーク15に向けて突出している。
第二のハウジング部92は、ベース部92aと、第二の突起部92bと、脚部92cと、筒状部92dと、を有する。ベース部92aは、中心部に開口部が設けられた円盤状の部材である。第二の突起部92bは、ベース部92aの径方向中央部からバックヨーク15に向けて突出している。バックヨーク15は、第一の突起部91bと第二の突起部92bとにより、回転軸AXと平行な方向(回転軸方向)から挟み込まれている。これにより、ステータコア11がハウジング90に固定されている。
ベース部92a、第二の突起部92b、バックヨーク15および第一の突起部91bは、これらを回転軸方向に貫通するねじによって互いに固定されている。脚部92cは、ベース部92aの外縁部に沿って環状に設けられている。筒状部92dは、ベース部92aの内縁部に沿って環状に設けられている。脚部92cは、ベース部92aからアーム部AP側とは反対側に突出し、図示略の支持台に固定されている。
第一のロータ20は、第一のロータコア21と、第一のロータブラケット22と、を有する。第一のロータコア21は、例えば、VR(Variable Reluctance)型の回転子である。第一のロータコア21は、複数の第一のティース14と径方向において対向配置されている。図4に示すように、第一のロータコア21は、径方向外側に突出する複数の第一の歯部21aを有する。複数の第一の歯部21aは、ステータコア11の内周に沿って並んでいる。第一のロータコア21のリラクタンス(磁気抵抗)は、第一のロータコア21の回転位置に応じて変化する。第一のロータコア21は、第一の励磁コイル12が第一のティース14に励磁した回転磁界に同期して、磁気抵抗が最小となるように回転する。
図1に示すように、第一のロータコア21は、第一のロータブラケット22に固定されている。第一のロータブラケット22は、回転軸AXの周りに筒状に設けられている。第一のロータブラケット22は、第三の軸受部110を介して第一のハウジング部91に固定されている。第三の軸受部110は、第一のロータ20をハウジング90に対して回転自在に支持する。第三の軸受部110は、例えば、軸受111と軸受112とを有する。軸受111は、第一のロータブラケット22の回転軸方向一端部(アーム部AP側の端部)を支持する。軸受112は、第一のロータブラケット22の回転軸方向中央部を支持する。
第一のロータブラケット22の回転軸方向一端部には、軸受111の内輪の一端面(アーム部AP側の端面)と接する第一の段部ST1が設けられている。筒状部91aの回転軸方向一端部(アーム部AP側の端部)には、軸受111の外輪の他端面(アーム部AP側とは反対側の端面)と接する第二の段部ST2が設けられている。
第一のロータブラケット22の回転軸方向中央部には、軸受112の内輪が嵌る第一の溝ST3が設けられている。筒状部91aの回転軸方向他端部には、軸受112の外輪の一端面(アーム部AP側の端面)と接する第三の段部ST4が設けられている。
第一のロータブラケット22、第一のハウジング部91および第三の軸受部110の相互の位置は、第一の段部ST1、第二の段部ST2、第一の溝ST3および第三の段部ST4によって位置決めされている。
第二のロータ30は、第二のロータコア31と、第二のロータブラケット32と、を有する。第二のロータコア31は、例えば、VR型の回転子である。図4に示すように、第二のロータコア31は、複数の第二のティース16と径方向において対向配置されている。第二のロータコア31は、径方向内側に突出する複数の第二の歯部31aを有する。複数の第二の歯部31aは、ステータコア11の外周に沿って並んでいる。第二のロータコア31のリラクタンス(磁気抵抗)は、第二のロータコア31の回転位置に応じて変化する。第二のロータコア31は、第二の励磁コイル13が第二のティース16に励磁した回転磁界に同期して、磁気抵抗が最小となるように回転する。
図1に示すように、第二のロータコア31は、第二のロータブラケット32に固定されている。第二のロータブラケット32は、筒状部32aと、突起部32bと、を有する。筒状部32aは、回転軸AXの周りに筒状に設けられている。突起部32bは、筒状部32aの回転軸方向中央部から内径側に突出している。突起部32bは、第四の軸受部113を介して第一のハウジング部91に固定されている。第四の軸受部113は、第二のロータ30をハウジング90に対して回転自在に支持する。
第一の突起部91bの外周面には、第四の軸受部113の内輪が嵌る第二の溝ST5が設けられている。突起部32bの内周面には、第四の軸受部113の外輪が嵌る第三の溝ST6が設けられている。第一のハウジング部91、第二のロータブラケット32および第四の軸受部113の相互の位置は、第二の溝ST5および第三の溝ST6によって位置決めされている。
第一のロータブラケット22および第二のロータブラケット32は、例えば、複数の要素部材を組み合わせて構成されている。複数の要素部材は、ねじSC2などにより固定されている。
第二のロータブラケット32と第一のハウジング部91との間には、第一の回転センサー101が設けられている。第一の回転センサー101は、ハウジング90に対する第二のロータブラケット32の回転角を検出し、コントローラー120(図4参照)に供給する。
第一の回転センサー101は、例えば、レゾルバである。第一の回転センサー101は、レゾルバステータ101aと、レゾルバロータ101bと、を有する。レゾルバステータ101aは、筒状部91aの回転軸方向中央部の内周面に固定されている。レゾルバロータ101bは、突起部32bの上面(アーム部AP側の側面)に固定されている。レゾルバステータ101aおよびレゾルバロータ101bは、第四の軸受部113の上方(アーム部AP側)に配置されている。コントローラー120は、第二のロータ30において所望の回転角を得られるように、第一の回転センサー101の検出結果に基づいて第二の駆動電流I2の電流量を調節する。
第一のロータブラケット22と第二のハウジング部92との間には、第二の回転センサー102が設けられている。第二の回転センサー102は、ハウジング90に対する第一のロータブラケット22の回転角を検出し、コントローラー120(図4参照)に供給する。
第二の回転センサー102は、例えば、レゾルバである。第二の回転センサー102は、レゾルバロータ102aと、レゾルバステータ102bと、を有する。レゾルバロータ102aは、第一のロータブラケット22の回転軸方向他端部の内周面に固定されている。レゾルバステータ102bは、筒状部92dの内周面に固定されている。コントローラー120は、第一のロータ20において所望の回転角を得られるように、第二の回転センサー102の検出結果に基づいて第一の駆動電流I1の電流量を調節する。
第一のロータ20には、ナット23が固定されている。ナット23は、第一のロータブラケット22の内径側に配置されている。ナット23は、第一のロータ20と同軸に配置され、第一のロータ20とともに回転する。ナット23の内径側には、ねじ軸70が挿入されている。ねじ軸70は、ナット23と螺合している。ねじ軸70は、ナット23と相対回転して回転軸方向に移動する。
ねじ軸70には、ブラケット50が固定されている。ブラケット50は、ブラケット本体51と、スライダー52と、を有する。ブラケット本体51は、L字状に屈曲している。ブラケット本体51の一端部は、留め具114によってねじ軸70の先端部に固定されている。ブラケット本体51の他端部は、第二のロータブラケット32の側面と対向配置されている。スライダー52は、ブラケット本体51の他端部に設けられている。
第二のロータ30には、直動案内機構60が固定されている。図3に示すように、直動案内機構60は、ブラケット50を回転軸方向にスライド自在に支持する。
図2および図3に示すように、直動案内機構60は、例えば、支持板61と、ガイドレール62と、を有する。支持板61は、第二のロータブラケット32の側面に沿って回転軸方向に延びている。支持板61には、回転軸AX側に突出するフランジ部61fが設けられている。フランジ部61fは、ねじSC1によって筒状部32aの上端部(アーム部AP側の端部)に固定されている。ガイドレール62は、支持板61の外周面上に固定されている。ガイドレール62は、回転軸方向に延び、スライダー52を回転軸方向にスライド自在に支持する。
アーム部APの一端部は、ブラケット50に固定されている。ブラケット50とアーム部APとは、一体に回転する。アーム80の内部は空洞となっている。ねじ軸70の中心部には、ねじ軸70を回転軸方向に貫通する貫通孔70Hが設けられている。アーム部APおよび第一のロータブラケット22には、貫通孔70と連通する貫通孔80Hおよび貫通孔22Hがそれぞれ設けられている。チャック部81と接続されるエア配管および電気配線などは、貫通孔22H、貫通孔70Hおよび貫通孔80Hを通ってアーム80の内部に導入されている。
図1および図2に示すように、アーム部APの他端部は、ねじ軸70の回転軸AXを挟んで直動案内機構60とは反対側に配置されている。直動案内機構60は、アーム部AP側には配置されていない。支持板61およびガイドレール62は、回転軸AXを挟んでアーム部APの他端部が配置される側には設けられていない。そのため、第二のロータ30の近傍までワークスペースとして利用可能となっている。
第二のロータ30によって回転駆動される回転体RBの重心の位置は、回転軸AXの近傍に配置されている。本実施形態では、回転体RBは、アーム部AP、直動案内機構60、ブラケット50およびチャック部81等(但し、モータ部MPは含まない)によって構成されている。この構成では、回転体RBの回転によってアクチュエータ1に振動が発生しにくい。回転体RBの重量は大きいため、回転体RBを第二のロータ30に固定するねじSC1は、要素部材どうしを固定するねじSC2に比べて、ねじ部の径が大きいものが用いられている。
回転軸AXを通ってアーム部APの短軸と平行な面をF1とすると、直動案内機構60およびブラケット50のトータルの重心の位置は、面F1を挟んで、アーム部APの重心の位置とは反対側に配置されている。例えば、第二のロータ30によって回転駆動される回転体RBの重心は、回転軸AX上に配置されている。これにより、アーム部APが回転してもアクチュエータ1に殆ど振動が発生しない。
なお、回転体RBの重心は、回転軸方向から見て、回転軸AXとぴったり一致していることが好ましいが、回転体RBの重心は、必ずしも回転軸AXとぴったり一致している必要はない。回転体RBの重心が回転軸AXのごく近傍であれば、アクチュエータ1の振動を効果的に抑制することができる。
例えば、回転体RBの重心が、回転軸方向から見て、ねじ軸70と重畳する位置に配置されていれば、アクチュエータ1の振動が有効に抑制される。そのため、本実施形態では、回転体RBの重心が、回転軸方向から見て、ねじ軸70と重畳する位置に配置されている場合も、回転体RBの重心が回転軸AX上に配置されているものと解釈する。
図4に示したコントローラー120は、ねじ軸70とブラケット50とが相対回転しないように第一のロータ20の回転角と第二のロータ30の回転角とを制御して、アーム部APを回転させる。
例えば、アーム部APを直動させずに回転運動させる場合には、第二のロータ30をアーム部APの回転角度に応じた角度だけ回転させるとともに、第一のロータ20も第二のロータ30の回転角と同じ角度だけ回転させる。これにより、ねじ軸70とナット23との相対回転角がゼロになり、ねじ軸70、ブラケット50およびアーム部APが、ナット23に対して回転軸方向に移動しなくなる。
ねじ軸70とブラケット50とが相対回転しないため、ねじ軸70とブラケット50とは軸受部を介さずに接続されている。軸受部が省略されることで、アクチュエータ1の構成が簡素化されている。
本実施形態のアクチュエータ1において、アーム部APを回転させずに直動運動させる場合には、第二のロータ30を回転させずに、第一のロータ20のみを回転させる。アーム部APを直動させずに回転運動させる場合には、第一のロータ20と第二のロータ30を同じ角度だけ回転させる。アーム部APの直動運動と回転運動は、別々のタイミングで実行され、同時には実行されない。
以上説明した本実施形態のアクチュエータ1では、回転軸AXを挟んでアーム部APと対向する位置に直動案内機構60が設けられている。直動案内機構60がアーム部AP側に配置されないので、アクチュエータ1が小型化される。また、直動案内機構60とアーム部APとが、回転軸AXを挟んで配置されるため、第二のロータ30によって回転駆動される回転体RBの重心の位置が回転軸AXの近傍に配置される。そのため、回転体RBの回転によってアクチュエータ1に振動が発生しにくい。
[第二の実施形態]
図5は、第二の実施形態に係るアクチュエータ2の断面図である。図6は、アーム部APを上昇させた状態を示す図である。本実施形態において第一の実施形態と共通する構成要素については、同じ符号を付し、詳細な説明は省略する。
図5に示すように、本実施形態において第一の実施形態と異なる点は、直動案内機構63が、回転軸方向において、第二のロータ30よりもアーム部AP側に配置されている点である。
直動案内機構63は、例えば、支持板64と、ガイドレール65と、を有する。支持板64は、回転軸AXに沿って第二のロータブラケット32の上方(アーム部AP側)に延びる。図6に示すように、ガイドレール65は、支持板64の外周面上に固定され、スライダー52を第二のロータブラケット32の上方において回転軸方向にスライドさせる。
この構成では、第二のロータ30の側方に直動案内機構63が配置されない。そのため、第二のロータ30の近傍までワークスペースとして利用することができる。
[第三の実施形態]
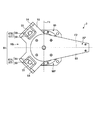
図7は、第三の実施形態に係るアクチュエータ3の上面図である。本実施形態において第一の実施形態と共通する構成要素については、同じ符号を付し、詳細な説明は省略する。
本実施形態において第一の実施形態と異なる点は、直動案内機構66が、ブラケット50を回転軸方向にスライド自在に支持する複数の直動案内部67を有する点である。
複数の直動案内部67は、第二のロータ30の回転方向に並んで配置されている。本実施形態では、例えば、複数の直動案内部67として、第一の直動案内部67Aと第二の直動案内部67Bとが設けられている。複数の直動案内部67は、例えば、回転軸AXを通ってアーム部APの長軸と平行な面F2に対して面対称な位置に配置されている。
各直動案内部67は、支持板68と、ガイドレール69と、を有する。ブラケット53は、各直動案内部67に対応した、複数のブラケット本体54と、複数のスライダー55と、を有する。各スライダー55は、対応するガイドレール69によって回転軸方向にスライド自在に支持されている。
直動案内機構66およびブラケット53のトータルの重心の位置は、面F2を挟んで、アーム部APの重心の位置とは反対側に配置されている。本実施形態では、アーム部AP、直動案内機構66、ブラケット53およびチャック部81等(但し、モータ部MPを含まない)からなる回転体RBの重心は、回転軸AX上に配置されている。これにより、アーム部APが回転してもアクチュエータ3に殆ど振動が発生しない。
なお、回転体RBの重心は、回転軸方向から見て、回転軸AXとぴったり一致していることが好ましいが、回転体RBの重心は、必ずしも回転軸AXとぴったり一致している必要はない。回転体RBの重心が回転軸AXのごく近傍であれば、アクチュエータ3の振動を効果的に抑制することができる。
例えば、回転体RBの重心が、回転軸方向から見て、ねじ軸70と重畳する位置に配置されていれば、アクチュエータ3の振動が有効に抑制される。そのため、本実施形態では、回転体RBの重心が、回転軸方向から見て、ねじ軸70と重畳する位置に配置されている場合も、回転体RBの重心が回転軸AX上に配置されているものと解釈する。
このように、本実施形態でも第一の実施形態と同様の効果が得られる。本実施形態では、直動案内機構66が、第二のロータ30の回転方向に並ぶ複数の直動案内部67を有する。そのため、複数の直動案内部67によってブラケット53を安定的に支持することができる。よって、モーメント剛性が高くなる。
以上、本発明の好適な実施形態を説明したが、本発明は上記の実施形態に記載されたものに限定されない。例えば、上記の実施形態では、第一のロータコア21および第二のロータコア31として、VR型の回転子が用いられたが、第一のロータコア21および第二のロータコア31として、PM(Permanent Magnet)型の回転子が用いられてもよい。
図8は、PM型の回転子を用いたモータ部MPの断面図の一例である。図8において、第一のロータ120は、永久磁石によって構成された第一のロータコア121を有する。第一のロータコア121は、N極のマグネット部とS極のマグネット部とを有する。N極のマグネット部とS極のマグネット部は、ステータコア11の内周面に沿って回転方向に交互に等間隔で配置されている。第一のロータコア121は、第一の励磁コイル12が第一のティース14に励磁した回転磁界に応じて回転する。第一のロータコア121は、第一のロータブラケット22に外周面に貼り付けられてもよいし、第二のロータコア22の内部に埋め込まれてもよい。
第二のロータ130は、永久磁石によって構成された第二のロータコア131とバックヨーク132とを有する。第二のロータコア131は、N極のマグネット部とS極のマグネット部とを有する。バックヨーク132は、第二のロータコア131の外周側に配置されている。N極のマグネット部とS極のマグネット部は、ステータコア11の外周面に沿って回転方向に交互に等間隔で配置されている。第二のロータコア131は、第二の励磁コイル13が第二のティース16に励磁した回転磁界に応じて回転する。第二のロータコア131は、第二のロータブラケット32(図1参照)に内周面に貼り付けられてもよいし、第二のロータブラケット32の内部に埋め込まれてもよい。
図8に示した構成を採用しても、上記の実施形態と同様の作用効果が得られる。本発明においては、使用する回転子の種類は問わず、いずれの種類の回転子を用いても、小型で振動の少ないアクチュエータが得られる。