JP6623044B2 - ステレオカメラ装置 - Google Patents
ステレオカメラ装置 Download PDFInfo
- Publication number
- JP6623044B2 JP6623044B2 JP2015229272A JP2015229272A JP6623044B2 JP 6623044 B2 JP6623044 B2 JP 6623044B2 JP 2015229272 A JP2015229272 A JP 2015229272A JP 2015229272 A JP2015229272 A JP 2015229272A JP 6623044 B2 JP6623044 B2 JP 6623044B2
- Authority
- JP
- Japan
- Prior art keywords
- road surface
- distance
- height
- image
- overlapping region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/06—Use of electric means to obtain final indication
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/10—Measuring distances in line of sight; Optical rangefinders using a parallactic triangle with variable angles and a base of fixed length in the observation station, e.g. in the instrument
- G01C3/14—Measuring distances in line of sight; Optical rangefinders using a parallactic triangle with variable angles and a base of fixed length in the observation station, e.g. in the instrument with binocular observation at a single point, e.g. stereoscopic type
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/103—Static body considered as a whole, e.g. static pedestrian or occupant recognition
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0133—Traffic data processing for classifying traffic situation
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/04—Detecting movement of traffic to be counted or controlled using optical or ultrasonic detectors
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/02—Active or adaptive cruise control system; Distance control
- B60T2201/022—Collision avoidance systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2210/00—Detection or estimation of road or environment conditions; Detection or estimation of road shapes
- B60T2210/30—Environment conditions or position therewithin
- B60T2210/32—Vehicle surroundings
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/06—Use of electric means to obtain final indication
- G01C3/08—Use of electric radiation detectors
- G01C3/085—Use of electric radiation detectors with electronic parallax measurement
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N2013/0074—Stereoscopic image analysis
- H04N2013/0081—Depth or disparity estimation from stereoscopic image signals
Description
Z=(f×B)/d
但し、fは右及び左カメラの焦点距離、Bは右カメラ22と左カメラ21の距離(基線長)である。また、視差データを3次元変換するために、上記Zを求めた地点の3次元上のX,Y方向の距離を次の式で表す。
X=(Z×xr)/f、
Y=(Z×yr)/f
但し、xrは右画像220上でのx座標、yrは右画像220上でのy座標である。
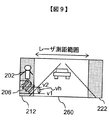
vh=h/(zv×wv/f)
但し、zvは階段206をステレオ領域240で計測した時の距離から自車が進行した距離を引いたもの、wvはカメラの1画素の縦方向のサイズ、fは焦点距離である。
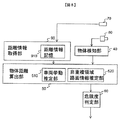
20 撮影部
21 左カメラ
22 右カメラ
30 視差情報取得部
40 物体検知部
50 物体距離算出部
60 危険度判定部
70 レーザレーダ
80 単眼カメラ
90 距離情報取得部
202 歩行者
203 走行路面
206 階段
210 左画像のステレオ領域
212 左画像の単眼領域
220 右画像のステレオ領域
222 右画像の単眼領域
240 実際の風景におけるステレオ領域
310 視差情報記憶部
510 車両挙動推定部
520 非重複領域路面情報推定部
Claims (4)
- 車両に搭載された複数のカメラで撮影した複数の画像の重複領域の視差情報を取得する視差情報取得部と、
前記重複領域で過去に取得された視差情報に基づいて、前記各画像中の前記重複領域以外の非重複領域で検出される物体と前記車両との距離を算出する物体距離算出部と、
前記視差情報に基づいて路面高さを算出する路面高さ算出部と、を備え、
前記物体は、前記重複領域の路面と異なる高さの前記非重複領域の路面上で検知され、
前記物体距離算出部は、前記非重複領域で検出される前記物体までの距離を算出することを特徴とするステレオカメラ装置。 - 前記路面高さ算出部で算出した歩道路面の高さ情報を記憶する記憶部を備え、
前記歩道路面の高さを計測した画像領域が車両の移動に従って前記非重複領域に移動したとき、前記物体距離算出部は、前記記憶部に記憶した歩道路面の高さ情報を用いて画像高さ方向における前記物体の位置を補正して、前記物体と前記車両との距離を算出することを特徴とする請求項1に記載のステレオカメラ装置。 - 前記非重複領域で検知される物体はオプティカルフローで検知された移動中の歩行者であり、
前記オプティカルフローで検知された歩行者は、次のフレーム以降はパターンマッチング方式で追跡されることを特徴とする請求項1に記載のステレオカメラ装置。 - 前記視差情報は、重複領域を垂直方向に特定の間隔で分割した領域単位で記憶されることを特徴とする請求項1から2のいずれか一項に記載のステレオカメラ装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015229272A JP6623044B2 (ja) | 2015-11-25 | 2015-11-25 | ステレオカメラ装置 |
| CN201680058241.9A CN108351207B (zh) | 2015-11-25 | 2016-11-07 | 立体相机装置 |
| EP16868359.7A EP3382336A4 (en) | 2015-11-25 | 2016-11-07 | STEREO CAMERA DEVICE |
| PCT/JP2016/082901 WO2017090410A1 (ja) | 2015-11-25 | 2016-11-07 | ステレオカメラ装置 |
| US15/765,853 US10501059B2 (en) | 2015-11-25 | 2016-11-07 | Stereo camera device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015229272A JP6623044B2 (ja) | 2015-11-25 | 2015-11-25 | ステレオカメラ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017096777A JP2017096777A (ja) | 2017-06-01 |
| JP6623044B2 true JP6623044B2 (ja) | 2019-12-18 |
Family
ID=58764061
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015229272A Active JP6623044B2 (ja) | 2015-11-25 | 2015-11-25 | ステレオカメラ装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10501059B2 (ja) |
| EP (1) | EP3382336A4 (ja) |
| JP (1) | JP6623044B2 (ja) |
| CN (1) | CN108351207B (ja) |
| WO (1) | WO2017090410A1 (ja) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6723079B2 (ja) * | 2016-06-08 | 2020-07-15 | 日立オートモティブシステムズ株式会社 | 物体距離検出装置 |
| JP6700623B2 (ja) * | 2016-10-07 | 2020-05-27 | アイシン・エィ・ダブリュ株式会社 | 走行支援装置及びコンピュータプログラム |
| CN110494416A (zh) | 2017-05-15 | 2019-11-22 | 旭化成株式会社 | 异氰酸酯的制造方法 |
| JP7104296B2 (ja) * | 2017-08-09 | 2022-07-21 | ミツミ電機株式会社 | 測距カメラ |
| JP6983584B2 (ja) * | 2017-09-04 | 2021-12-17 | キヤノン株式会社 | 撮像装置、それを備える測距装置及び車載カメラシステム |
| JP2019045819A (ja) * | 2017-09-07 | 2019-03-22 | キヤノン株式会社 | 光学系、それを備える撮像装置及び投影装置 |
| JP7025912B2 (ja) * | 2017-12-13 | 2022-02-25 | 日立Astemo株式会社 | 車載環境認識装置 |
| JP7104294B2 (ja) * | 2017-12-18 | 2022-07-21 | ミツミ電機株式会社 | 測距カメラ |
| DE102018202753A1 (de) * | 2018-02-23 | 2019-08-29 | Audi Ag | Verfahren zur Ermittlung einer Entfernung zwischen einem Kraftfahrzeug und einem Objekt |
| US20190278273A1 (en) * | 2018-03-07 | 2019-09-12 | Robert Bosch Gmbh | Odometry system and method for tracking traffic lights |
| JP6877636B2 (ja) * | 2018-04-23 | 2021-05-26 | 日立Astemo株式会社 | 車載カメラ装置 |
| US10556596B2 (en) * | 2018-05-31 | 2020-02-11 | Nissan North America, Inc. | Driver scoring and safe driving notifications |
| EP3606032B1 (en) * | 2018-07-30 | 2020-10-21 | Axis AB | Method and camera system combining views from plurality of cameras |
| CN110500959A (zh) * | 2019-09-29 | 2019-11-26 | 中国科学院云南天文台 | 一种单摄像头口内三维扫描系统 |
| JP7225074B2 (ja) * | 2019-10-08 | 2023-02-20 | 日立Astemo株式会社 | 物体認識装置 |
| JP7293100B2 (ja) * | 2019-12-17 | 2023-06-19 | 日立Astemo株式会社 | カメラシステム |
| JP7427487B2 (ja) * | 2020-03-24 | 2024-02-05 | キヤノン株式会社 | 光学装置、車載システム、および移動装置 |
| JP2023076169A (ja) * | 2021-11-22 | 2023-06-01 | 日立Astemo株式会社 | 画像処理装置 |
| JP2023079012A (ja) * | 2021-11-26 | 2023-06-07 | 日立Astemo株式会社 | 外界認識装置 |
| JP2023078934A (ja) * | 2021-11-26 | 2023-06-07 | 日立Astemo株式会社 | 外界認識装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3596314B2 (ja) * | 1998-11-02 | 2004-12-02 | 日産自動車株式会社 | 物体端の位置計測装置および移動体の通行判断装置 |
| JP3669205B2 (ja) * | 1999-05-17 | 2005-07-06 | 日産自動車株式会社 | 障害物認識装置 |
| JP2005024463A (ja) * | 2003-07-04 | 2005-01-27 | Fuji Heavy Ind Ltd | ステレオ広視野画像処理装置 |
| US7388475B2 (en) * | 2006-01-19 | 2008-06-17 | Gm Global Technology Operations, Inc. | Lane departure warning and avoidance system with warning modification criteria |
| JP4940706B2 (ja) * | 2006-03-01 | 2012-05-30 | トヨタ自動車株式会社 | 物体検出装置 |
| JP4893212B2 (ja) * | 2006-10-04 | 2012-03-07 | トヨタ自動車株式会社 | 周辺監視装置 |
| JP5011049B2 (ja) * | 2007-09-28 | 2012-08-29 | 日立オートモティブシステムズ株式会社 | 画像処理システム |
| JP2010079582A (ja) * | 2008-09-25 | 2010-04-08 | Toshiba Corp | 物体を検出する装置、方法及びプログラム |
| JP6014440B2 (ja) * | 2012-09-26 | 2016-10-25 | 日立オートモティブシステムズ株式会社 | 移動物体認識装置 |
| GB2499694B8 (en) * | 2012-11-09 | 2017-06-07 | Sony Computer Entertainment Europe Ltd | System and method of image reconstruction |
| JP5906272B2 (ja) * | 2014-03-28 | 2016-04-20 | 富士重工業株式会社 | 車両用ステレオ画像処理装置 |
-
2015
- 2015-11-25 JP JP2015229272A patent/JP6623044B2/ja active Active
-
2016
- 2016-11-07 US US15/765,853 patent/US10501059B2/en active Active
- 2016-11-07 CN CN201680058241.9A patent/CN108351207B/zh active Active
- 2016-11-07 WO PCT/JP2016/082901 patent/WO2017090410A1/ja active Application Filing
- 2016-11-07 EP EP16868359.7A patent/EP3382336A4/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP3382336A4 (en) | 2020-02-19 |
| CN108351207A (zh) | 2018-07-31 |
| US10501059B2 (en) | 2019-12-10 |
| EP3382336A1 (en) | 2018-10-03 |
| US20180281757A1 (en) | 2018-10-04 |
| CN108351207B (zh) | 2020-08-14 |
| WO2017090410A1 (ja) | 2017-06-01 |
| JP2017096777A (ja) | 2017-06-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6623044B2 (ja) | ステレオカメラ装置 | |
| EP3057063B1 (en) | Object detection device and vehicle using same | |
| US10580155B2 (en) | Image processing apparatus, imaging device, device control system, frequency distribution image generation method, and recording medium | |
| US9704047B2 (en) | Moving object recognition apparatus | |
| JP6450294B2 (ja) | 物体検出装置、物体検出方法、及びプログラム | |
| US9747524B2 (en) | Disparity value deriving device, equipment control system, movable apparatus, and robot | |
| WO2017208976A1 (ja) | 駐車支援装置及び駐車支援方法 | |
| US11691585B2 (en) | Image processing apparatus, imaging device, moving body device control system, image processing method, and program product | |
| JP3727400B2 (ja) | 横断者の検出装置 | |
| JP2008033750A (ja) | 物体傾き検出装置 | |
| JP6032034B2 (ja) | 物体検知装置 | |
| WO2018179281A1 (ja) | 物体検出装置及び車両 | |
| WO2017145541A1 (ja) | 移動体 | |
| JP2009053818A (ja) | 画像処理装置及びその方法 | |
| KR20060021922A (ko) | 두 개의 카메라를 이용한 장애물 감지 기술 및 장치 | |
| JP2018025906A (ja) | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、及びプログラム | |
| JP2010079582A (ja) | 物体を検出する装置、方法及びプログラム | |
| JP6543935B2 (ja) | 視差値導出装置、機器制御システム、移動体、ロボット、視差値導出方法、およびプログラム | |
| JP5717416B2 (ja) | 運転支援制御装置 | |
| JP7134780B2 (ja) | ステレオカメラ装置 | |
| JP2007233487A (ja) | 歩行者検出方法、装置、およびプログラム | |
| JP6564682B2 (ja) | 対象物検出装置、対象物検出方法、及び、対象物検出プログラム | |
| JP6429101B2 (ja) | 画像判定装置、画像処理装置、画像判定プログラム、画像判定方法、移動体 | |
| JP6561688B2 (ja) | 検出装置、検出方法、撮像装置、機器制御システム、及びプログラム | |
| JP2000131064A (ja) | 高さ計測方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151127 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170119 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170125 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181012 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190604 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190621 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191029 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191125 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6623044 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |