JP7293100B2 - カメラシステム - Google Patents
カメラシステム Download PDFInfo
- Publication number
- JP7293100B2 JP7293100B2 JP2019227407A JP2019227407A JP7293100B2 JP 7293100 B2 JP7293100 B2 JP 7293100B2 JP 2019227407 A JP2019227407 A JP 2019227407A JP 2019227407 A JP2019227407 A JP 2019227407A JP 7293100 B2 JP7293100 B2 JP 7293100B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- image
- unit
- camera system
- road surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/04—Detecting movement of traffic to be counted or controlled using optical or ultrasonic detectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Image Analysis (AREA)
- Measurement Of Optical Distance (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
Description
距離取得領域について距離を取得する距離取得部と、
前記距離取得領域と少なくとも一部が重複する画像取得領域について画像を取得するカメラと、
前記画像について、テンプレートを用いてテンプレートマッチング処理を行うことにより対象物を検知する、テンプレートマッチング検知部と、
前記距離取得部で算出された距離に基づき、路面の位置を推定する路面推定部と、
前記路面の位置に基づき、前記画像における探索線を算出する、探索線算出部と
を備え、
前記探索線は、前記画像中の路面において距離が所定の値となる位置に沿った線であり、
前記テンプレートマッチング処理は、前記探索線に沿って行われる、
ことを特徴とする。
[実施例1]
本発明の実施例1に係る画像処理システムは、画像(たとえばカメラで撮像されたシャッタ画像)中において、対象となる物体検知を行うものであり、たとえば移動体や立体物、特定の物体を検知することができる。この「移動体」とは、背景に対して動いているものを指す。ただし、「背景」とは、画像中で変化しない画素からなる領域に限らない。例えば前方センシングを行う車載カメラの場合には、路面が背景の例であり、路面に対して移動を行う歩行者や車両が移動体の例である。また例えば固定された監視カメラであれば、カメラ画像内で動く人物や動物、動かされる物、等が移動体の例である。
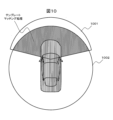
本発明の実施例2について説明する。実施例2は実施例1と基本的には同じであるが、以下の点において異なる。実施例2では、車両の四面に撮像部を設置し、全周囲の検知を行える様にする。そのため撮像部の水平画角は広くとる。
本発明の実施例3について説明する。実施例3は実施例1と基本的には同じであるが、以下の点において異なる。実施例3では、測距センサ部を設け、測距センサ部の距離情報に基づいて路面推定を行い、探索線を決定してテンプレートマッチング処理を行う。
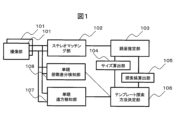
102…ステレオマッチング部(距離取得部)
103…路面推定部
104…サイズ算出部(テンプレートサイズ決定部)
105…探索線算出部
106…テンプレート探索方法決定部
107…単眼遠方検知部
108…単眼俯瞰差分検知部
201…車両
202…ステレオカメラ
301,302…画像
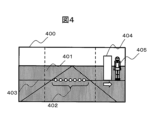
303,400…合成画像
401…路面部
402…同一距離点
403…探索線
404…枠
405,501…物体
502…レンズ
503…撮像センサ
504…路面
505…焦点距離
506…奥行距離
507,508…高さ
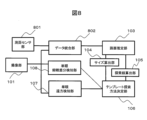
601…撮像部
602…ステレオマッチング部(距離取得部)
801…測距センサ部
802…データ統合部
Claims (7)
- カメラシステムであって、
前記カメラシステムは、
距離取得領域について距離を取得する距離取得部と、
前記距離取得領域と少なくとも一部が重複する画像取得領域について画像を取得するカメラと、
前記画像について、テンプレートを用いてテンプレートマッチング処理を行うことにより対象物を検知する、テンプレートマッチング検知部と、
前記距離取得部で算出された距離に基づき、路面の位置を推定する路面推定部と、
前記路面の位置に基づき、前記画像における探索線を算出する、探索線算出部と
を備え、
前記探索線は、前記画像中の路面において距離が所定の値となる位置に沿った線であり、
前記テンプレートマッチング処理は、一つのカメラで撮像された単眼領域において、前記探索線に沿って行われる、
ことを特徴とするカメラシステム。 - 請求項1に記載のカメラシステムであって、前記距離取得部は複数のカメラを備え、ステレオマッチングを行うことにより距離を算出することを特徴とする、カメラシステム。
- 請求項2に記載のカメラシステムであって、
前記画像のうち第1領域について、異なる時刻の俯瞰画像を比較する俯瞰差分方式により対象物を検知する、俯瞰差分検知部をさらに備え、
前記テンプレートマッチング検知部は、前記画像のうち、前記第1領域とは異なる第2領域において前記テンプレートマッチング処理を行う、
ことを特徴とするカメラシステム。 - 請求項1に記載のカメラシステムであって、前記路面の位置に基づき前記テンプレートのサイズを決定する、テンプレートサイズ決定部をさらに備えることを特徴とする、カメラシステム。
- 請求項1に記載のカメラシステムであって、前記距離取得部は、距離を測定する測距センサ部を備えることを特徴とする、カメラシステム。
- 請求項5に記載のカメラシステムであって、前記テンプレートマッチング処理を、前記距離取得領域の外部において行うことを特徴とする、カメラシステム。
- 請求項5に記載のカメラシステムであって、物体の種別を識別するために、前記テンプレートマッチング処理を、前記距離取得領域内において行うことを特徴とするカメラシステム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019227407A JP7293100B2 (ja) | 2019-12-17 | 2019-12-17 | カメラシステム |
| PCT/JP2020/038395 WO2021124657A1 (ja) | 2019-12-17 | 2020-10-09 | カメラシステム |
| CN202080082086.0A CN114762019A (zh) | 2019-12-17 | 2020-10-09 | 摄像机系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019227407A JP7293100B2 (ja) | 2019-12-17 | 2019-12-17 | カメラシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021096638A JP2021096638A (ja) | 2021-06-24 |
| JP7293100B2 true JP7293100B2 (ja) | 2023-06-19 |
Family
ID=76431396
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019227407A Active JP7293100B2 (ja) | 2019-12-17 | 2019-12-17 | カメラシステム |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7293100B2 (ja) |
| CN (1) | CN114762019A (ja) |
| WO (1) | WO2021124657A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7727502B2 (ja) * | 2021-11-22 | 2025-08-21 | Astemo株式会社 | 画像処理装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002099997A (ja) | 2000-09-26 | 2002-04-05 | Mitsubishi Motors Corp | 動体物検出装置 |
| JP2004120585A (ja) | 2002-09-27 | 2004-04-15 | Mitsubishi Electric Corp | 車載用走行車線認識装置 |
| JP2007064894A (ja) | 2005-09-01 | 2007-03-15 | Fujitsu Ten Ltd | 物体検出装置、物体検出方法および物体検出プログラム |
| WO2011090053A1 (ja) | 2010-01-21 | 2011-07-28 | クラリオン株式会社 | 障害物検知警報装置 |
| WO2016092925A1 (ja) | 2014-12-09 | 2016-06-16 | クラリオン株式会社 | 接近車両検出装置 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4171282B2 (ja) * | 2002-10-25 | 2008-10-22 | 富士重工業株式会社 | 地形認識装置および地形認識方法 |
| JP2006318061A (ja) * | 2005-05-10 | 2006-11-24 | Olympus Corp | 画像処理装置、画像処理方法、および画像処理用プログラム |
| WO2006121088A1 (ja) * | 2005-05-10 | 2006-11-16 | Olympus Corporation | 画像処理装置、画像処理方法および画像処理プログラム |
| JP4804202B2 (ja) * | 2006-04-10 | 2011-11-02 | 富士重工業株式会社 | ステレオ式監視装置 |
| JP2010020710A (ja) * | 2008-07-14 | 2010-01-28 | Mazda Motor Corp | 路側固定物検出装置 |
| JP2013140515A (ja) * | 2012-01-05 | 2013-07-18 | Toyota Central R&D Labs Inc | 立体物検出装置及びプログラム |
| JP2013161241A (ja) * | 2012-02-03 | 2013-08-19 | Toyota Motor Corp | 物体認識装置、物体認識方法 |
| JP6035774B2 (ja) * | 2012-02-24 | 2016-11-30 | 株式会社リコー | 画像処理装置、画像処理方法、及び車両 |
| JP2014021017A (ja) * | 2012-07-20 | 2014-02-03 | Sanyo Electric Co Ltd | 情報取得装置および物体検出装置 |
| JP2014052307A (ja) * | 2012-09-07 | 2014-03-20 | Sanyo Electric Co Ltd | 情報取得装置および物体検出装置 |
| JP2014067320A (ja) * | 2012-09-27 | 2014-04-17 | Hitachi Automotive Systems Ltd | ステレオカメラ装置 |
| JP6550881B2 (ja) * | 2014-07-14 | 2019-07-31 | 株式会社リコー | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム |
| CN104881661B (zh) * | 2015-06-23 | 2018-02-13 | 河北工业大学 | 基于结构相似度的车辆检测方法 |
| JP6548518B2 (ja) * | 2015-08-26 | 2019-07-24 | 株式会社ソニー・インタラクティブエンタテインメント | 情報処理装置および情報処理方法 |
| JP6623044B2 (ja) * | 2015-11-25 | 2019-12-18 | 日立オートモティブシステムズ株式会社 | ステレオカメラ装置 |
| JP2017167970A (ja) * | 2016-03-17 | 2017-09-21 | 株式会社リコー | 画像処理装置、物体認識装置、機器制御システム、画像処理方法およびプログラム |
| CN106228110B (zh) * | 2016-07-07 | 2019-09-20 | 浙江零跑科技有限公司 | 一种基于车载双目相机的障碍物及可行驶区域检测方法 |
| CN109631829B (zh) * | 2018-12-17 | 2022-05-27 | 南京理工大学 | 一种自适应快速匹配的双目测距方法 |
-
2019
- 2019-12-17 JP JP2019227407A patent/JP7293100B2/ja active Active
-
2020
- 2020-10-09 WO PCT/JP2020/038395 patent/WO2021124657A1/ja not_active Ceased
- 2020-10-09 CN CN202080082086.0A patent/CN114762019A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002099997A (ja) | 2000-09-26 | 2002-04-05 | Mitsubishi Motors Corp | 動体物検出装置 |
| JP2004120585A (ja) | 2002-09-27 | 2004-04-15 | Mitsubishi Electric Corp | 車載用走行車線認識装置 |
| JP2007064894A (ja) | 2005-09-01 | 2007-03-15 | Fujitsu Ten Ltd | 物体検出装置、物体検出方法および物体検出プログラム |
| WO2011090053A1 (ja) | 2010-01-21 | 2011-07-28 | クラリオン株式会社 | 障害物検知警報装置 |
| WO2016092925A1 (ja) | 2014-12-09 | 2016-06-16 | クラリオン株式会社 | 接近車両検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2021124657A1 (ja) | 2021-06-24 |
| CN114762019A (zh) | 2022-07-15 |
| JP2021096638A (ja) | 2021-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10909395B2 (en) | Object detection apparatus | |
| US6956469B2 (en) | Method and apparatus for pedestrian detection | |
| JP4406381B2 (ja) | 障害物検出装置及び方法 | |
| US8102427B2 (en) | Camera egomotion estimation from an infra-red image sequence for night vision | |
| US8867790B2 (en) | Object detection device, object detection method, and program | |
| US7899211B2 (en) | Object detecting system and object detecting method | |
| KR101758684B1 (ko) | 객체 추적 장치 및 방법 | |
| US20050232463A1 (en) | Method and apparatus for detecting a presence prior to collision | |
| US10659762B2 (en) | Stereo camera | |
| KR101551026B1 (ko) | 차량 검출 방법 | |
| WO2017138245A1 (ja) | 画像処理装置、物体認識装置、機器制御システム、画像処理方法およびプログラム | |
| CN108369739B (zh) | 物体检测装置和物体检测方法 | |
| JP2016152027A (ja) | 画像処理装置、画像処理方法およびプログラム | |
| CN111382722A (zh) | 车牌图像优选方法、图像处理装置及具有存储功能的装置 | |
| JP6410231B2 (ja) | 位置合わせ装置、位置合わせ方法及び位置合わせ用コンピュータプログラム | |
| JP2018503195A (ja) | 物体検出方法及び物体検出装置 | |
| JP7293100B2 (ja) | カメラシステム | |
| US20180268228A1 (en) | Obstacle detection device | |
| JP2022014673A (ja) | 画像処理装置 | |
| KR20170119167A (ko) | 도로 상의 객체를 검출하기 위한 객체 검출 시스템 및 방법 | |
| WO2022270183A1 (ja) | 演算装置、速度算出方法 | |
| JP4696925B2 (ja) | 画像処理装置 | |
| JP4788399B2 (ja) | 歩行者検出方法、装置、およびプログラム | |
| Garg et al. | High-Precision Positioning of Known Objects Using a Static Monocular Camera | |
| KR20240115442A (ko) | 악조건에 강인한 멀티 카메라 기반 전방향 비주얼 오도메트리를 위한 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220413 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230110 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230310 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230509 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230607 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7293100 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |