JP6596458B2 - 電動式油圧作業機械の油圧駆動装置 - Google Patents
電動式油圧作業機械の油圧駆動装置 Download PDFInfo
- Publication number
- JP6596458B2 JP6596458B2 JP2017047817A JP2017047817A JP6596458B2 JP 6596458 B2 JP6596458 B2 JP 6596458B2 JP 2017047817 A JP2017047817 A JP 2017047817A JP 2017047817 A JP2017047817 A JP 2017047817A JP 6596458 B2 JP6596458 B2 JP 6596458B2
- Authority
- JP
- Japan
- Prior art keywords
- hydraulic
- power storage
- pressure
- control
- horsepower
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2239—Control of flow rate; Load sensing arrangements using two or more pumps with cross-assistance
- E02F9/2242—Control of flow rate; Load sensing arrangements using two or more pumps with cross-assistance including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2246—Control of prime movers, e.g. depending on the hydraulic load of work tools
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F5/00—Dredgers or soil-shifting machines for special purposes
- E02F5/28—Dredgers or soil-shifting machines for special purposes for cleaning watercourses or other ways
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2091—Control of energy storage means for electrical energy, e.g. battery or capacitors
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2232—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps
- E02F9/2235—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2267—Valves or distributors
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2271—Actuators and supports therefor and protection therefor
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2296—Systems with a variable displacement pump
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
- F15B11/161—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors with sensing of servomotor demand or load
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
- F15B11/17—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors using two or more pumps
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/007—Regulation of charging or discharging current or voltage
- H02J7/00712—Regulation of charging or discharging current or voltage the cycle being controlled or terminated in response to electric parameters
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
- E02F3/325—Backhoes of the miniature type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20507—Type of prime mover
- F15B2211/20515—Electric motor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/2053—Type of pump
- F15B2211/20538—Type of pump constant capacity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/2053—Type of pump
- F15B2211/20546—Type of pump variable capacity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20576—Systems with pumps with multiple pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/25—Pressure control functions
- F15B2211/253—Pressure margin control, e.g. pump pressure in relation to load pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/255—Flow control functions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/265—Control of multiple pressure sources
- F15B2211/2654—Control of multiple pressure sources one or more pressure sources having priority
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/275—Control of the prime mover, e.g. hydraulic control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/505—Pressure control characterised by the type of pressure control means
- F15B2211/50563—Pressure control characterised by the type of pressure control means the pressure control means controlling a differential pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/515—Pressure control characterised by the connections of the pressure control means in the circuit
- F15B2211/5157—Pressure control characterised by the connections of the pressure control means in the circuit being connected to a pressure source and a return line
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/575—Pilot pressure control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/605—Load sensing circuits
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6306—Electronic controllers using input signals representing a pressure
- F15B2211/6309—Electronic controllers using input signals representing a pressure the pressure being a pressure source supply pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6306—Electronic controllers using input signals representing a pressure
- F15B2211/6313—Electronic controllers using input signals representing a pressure the pressure being a load pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/633—Electronic controllers using input signals representing a state of the prime mover, e.g. torque or rotational speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6346—Electronic controllers using input signals representing a state of input means, e.g. joystick position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6651—Control of the prime mover, e.g. control of the output torque or rotational speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6654—Flow rate control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6655—Power control, e.g. combined pressure and flow rate control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/705—Output members, e.g. hydraulic motors or cylinders or control therefor characterised by the type of output members or actuators
- F15B2211/7051—Linear output members
- F15B2211/7053—Double-acting output members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/705—Output members, e.g. hydraulic motors or cylinders or control therefor characterised by the type of output members or actuators
- F15B2211/7058—Rotary output members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/71—Multiple output members, e.g. multiple hydraulic motors or cylinders
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/71—Multiple output members, e.g. multiple hydraulic motors or cylinders
- F15B2211/7135—Combinations of output members of different types, e.g. single-acting cylinders with rotary motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0047—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries with monitoring or indicating devices or circuits
- H02J7/0048—Detection of remaining charge capacity or state of charge [SOC]
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Operation Control Of Excavators (AREA)
- Fluid-Pressure Circuits (AREA)
Description
〜構成〜
図1は、本発明の第1の実施の形態による電動式油圧作業機械(油圧ショベル)の油圧駆動装置を示す図である。
以上において、固定容量型のメインポンプ102,202は第1及び第2油圧ポンプであり、第1及び第2油圧ポンプから吐出された圧油は共通の圧油供給路305で合流して複数の流量制御弁6a,6b,6c,6d,6e,6f,6g,6hに供給され、更に複数のアクチュエータ3a,3b,3c,3d,3e,3f,3g,3hへと供給される。
本実施の形態の作動を図1〜7を用いて説明する。
まず、図4に示す仮想制限トルク演算部51の機能ブロック図において、第1SOC推定部51aで推定される蓄電装置170の蓄電状態SOC1と、第2SOC推定部51bで推定される蓄電装置270の蓄電状態SOC2が等しい場合を考える。
全ての操作装置522,523,524a,524b…の操作レバー(以下適宜単に操作レバーという)が中立なので、全ての流量制御弁6a,6b,6c,6d,6e,6f,6g,6h(図13参照)が全て中立位置にある。
ブーム用操作装置523の操作レバーを上げ方向、すなわちブームシリンダ3aが伸長する方向に操作レバーを入力した場合を考える。
図4に示す仮想制限トルク演算部51の機能ブロック図において、第1SOC推定部51aで推定される蓄電装置170の蓄電状態SOC1と、第2SOC推定部51bで推定される蓄電装置270の蓄電状態SOC2の関係が、SOC1>SOC2の場合を考える。
全ての操作レバーが中立の場合、前述の(a)SOC1=SOC2の場合と同様に、固定容量型のメインポンプ102,202はともに最小の回転数にて最小の流量を吐出する。
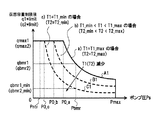
メインポンプ102,202がそれぞれの仮想制限トルクT1,T2が規定する馬力の範囲で、ロードセンシング制御にて必要な流量を吐出する基本的な作動については、前述の(a)SOC1=SOC2の場合と同様である。
図4に示す仮想制限トルク演算部51の機能ブロック図において、第1SOC推定部51aで推定される蓄電装置170の蓄電状態SOC1と、第2SOC推定部51bで推定される蓄電装置270の蓄電状態SOC2の関係が、SOC1<SOC2の場合を考える。
全ての操作レバーが中立の場合は、前述の(a)SOC1=SOC2、(b)SOC1>SOC2の場合と同様に、固定容量型のメインポンプ102,202はともに最小の回転数にて最小の流量を吐出する。
メインポンプ102,202がそれぞれの仮想制限トルクT1,T2が規定する馬力の範囲で、ロードセンシング制御にて必要な流量を吐出する基本的な作動については、前述の(a)SOC1=SOC2の場合と同様である。
本実施の形態によれば以下の効果が得られる。
図12A及び図12Bにテーブル51d,51eの特性の第1変形例を示す。
〜構成〜
図8は、本発明の第2の実施の形態による電動式油圧作業機械(油圧ショベル)の油圧駆動装置を示す図である。
以上のように構成した本実施の形態においては、圧油供給路105,205にチェック弁180,280を設けたため、固定容量型のメインポンプ102,202を駆動する電動機101,201のどちらか一方を停止した場合に、共通の圧油供給路305の圧力が停止している固定容量型のメインポンプ102,202の吐出ポートに印加されることが防止される。
本実施の形態によれば、第1の実施の形態の効果に加えて以下の効果が得られる。
〜構成〜
図9は、本発明の第3の実施の形態による電動式油圧作業機械(油圧ショベル)の油圧駆動装置を示す図である。
以上において、電動機301は、蓄電装置170,270(第1及び第2蓄電装置)の一方によって電力が供給され、パイロットポンプ30を駆動する第3電動機であり、
コントローラ55は、圧力検出器42及びインバータ360とともに、パイロットポンプ30により生成されるパイロット1次圧Ppiが目標圧力(目標パイロット1次圧Ppi0)と等しくなるよう電動機301(第3電動機)の回転数を制御するパイロットポンプ制御装置を構成する。
第3の実施の形態の作動を、図9、図10、図11を用いて以下説明する。
圧油供給路31の圧力(パイロット1次圧)が目標パイロット1次圧Ppi0よりも低かった場合を考える。
圧油供給路31の圧力(パイロット1次圧)が目標パイロット1次圧Ppi0よりも高かった場合を考える。
本実施の形態によれば、第1の実施の形態の効果に加えて以下の効果が得られる。
〜構成〜
図13は、本発明の第4の実施の形態による電動式油圧作業機械(油圧ショベル)の油圧駆動装置を示す図である。
以上において、可変容量型のメインポンプ122,222(又は422,622)は第1及び第2油圧ポンプであり、第1及び第2油圧ポンプから吐出された圧油は共通の圧油供給路307(又は308)で合流して複数の流量制御弁16a,16b,16d,16e,16g(又は16a,16b,16c,16f,16h)に供給され、更に複数のアクチュエータ3a,3b,3d,3e,3g(又は3a,3b,3d,3e,3g)へと供給される。
第4の実施の形態の作動を図12〜17を用いて説明する。
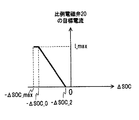
図15に比例電磁弁目標電流演算部151の機能ブロック図を示す。
前述のようにブームシリンダ3a、アームシリンダ3b、バケットシリンダ3d、スイングシリンダ3e、右走行モータ3gの最大操作パイロット圧が前記圧力検出器43を介してコントローラ150に入力され、ブームシリンダ3a(上げ方向のみ)、アームシリンダ3b、旋回モータ3c、ブレードシリンダ3h、左走行モータ3fの最大操作パイロット圧が前記圧力検出器44を介してコントローラ150に入力されるので、全ての操作レバーが中立の場合は、コントローラ150内のゲインテーブル152a,152bによって、それぞれのゲインN_gain1,N_gain2は最小の値(例えば0%)に保たれる。
ブーム用の操作レバーを上げ方向、すなわちブームシリンダ3aが伸長する方向に操作レバーを入力した場合を考える。
図15に示す比例電磁弁目標電流演算部151の機能ブロック図において、
第1SOC推定部151aで推定される蓄電装置170の蓄電状態SOC1と、第2SOC推定部151bで推定される蓄電装置270の蓄電状態SOC2の関係が、SOC1>SOC2の場合を考える。
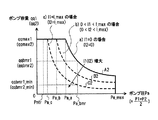
全ての操作レバーが中立の場合、前述の(a)SOC1=SOC2と同様に、可変容量型のメインポンプ122,222,422,622はともに最小の回転数にて最小の流量を吐出する。
可変容量型のメインポンプ122,222,422,622を駆動する電動機101,201,401,601の回転数がブーム上げの操作レバー入力量に応じて増加する基本的な作動については、前述の(a)SOC1=SOC2の場合と同様である。
SOC1>SOC2がSOC1<SOC2に換わることによりメインポンプ122,422とメインポンプ222,622との関係が逆になることを除いて、作動は実質的に(b)と同じである。
本実施の形態によっても、従来の2ポンプを備えた開回路の油圧駆動装置に対して第1の実施の形態と同様の効果が得られる。
4 制御弁ブロック
6a〜6h 流量制御弁
7a〜7h 圧力補償弁
9a〜9g シャトル弁
14,32 リリーフ弁
16a〜16j 方向切換弁(流量制御弁)
19a〜19p シャトル弁
20,21 比例電磁弁(馬力配分制御装置)
24 ゲートロックレバー
31 圧油供給路(パイロット)
40,41,42 圧力検出器
43,44 圧力検出器
50,55 コントローラ
51 仮想制限トルク演算部(馬力配分制御装置)
51a 第1SOC推定部(第1蓄電状態推定部)
51b 第2SOC推定部(第2蓄電状態推定部)
51c 差分器(馬力制御量演算部)
51d 第1テーブル(馬力制御量演算部)
51e 第2テーブル(馬力制御量演算部)
52,53 電動機回転数制御部
52r,53r 可変馬力制御テーブル(第1及び第2馬力制御装置;馬力配分制御装置;第1及び第2許容値変更部)
52s,53s 最小値選択器(第1及び第2馬力制御装置)
52a〜52m テーブルその他の演算要素(第1流量制御装置)
53a〜53m テーブルその他の演算要素(第2流量制御装置)
56 基準回転数指示ダイヤル
80a〜80j チェック弁
100 切換弁
101,201 電動機(第1及び第2電動機)
102,202 固定容量型のメインポンプ(第1及び第2油圧ポンプ)
104 制御弁ブロック
105,205 圧油供給路(メイン)
122,422 可変容量型のメインポンプ(第1油圧ポンプ)
122a,222a,422a,622a レギュレータピストン(第1及び第2馬力制御装置)
130,230,30 固定容量型のパイロットポンプ
133,233,180,280 チェック弁
150 コントローラ
151 比例電磁弁出力電流演算部(馬力配分制御装置)
152a,152b〜155a,155b テーブル及び乗算器(第1及び第2流量制御装置)
160,260,360 インバータ
161,261,361 昇降圧チョッパ
170,270 蓄電装置(第1及び第2蓄電装置)
171,271 バッテリマネジメントシステム(BMS)
180,280 チェック弁(第1及び第2チェック弁)
222,622 可変容量型のメインポンプ(第2油圧ポンプ)
301 電動機(第3電動機)
305,307,308 共通の圧油供給路
401,601 電動機(第1及び第2電動機)
460,660 インバータ
Claims (8)
- 第1油圧ポンプと、
前記第1油圧ポンプから供給される圧油により駆動される複数のアクチュエータと、
前記複数のアクチュエータへ供給される圧油の方向と流量を制御する複数の流量制御弁と、
前記第1油圧ポンプを駆動する第1電動機と、
前記第1電動機に電力を供給する第1蓄電装置と、
前記第1油圧ポンプの吐出圧が上昇したときに前記第1油圧ポンプの吐出流量を減少させることで前記第1油圧ポンプの吸収馬力が第1許容値を超えないように制御する第1馬力制御装置とを備えた電動式油圧作業機械の油圧駆動装置において、
第2油圧ポンプと、
前記第1及び第2油圧ポンプから吐出された圧油が合流し、前記複数の流量制御弁へと供給される共通の圧油供給路と、
前記第2油圧ポンプを駆動する第2電動機と、
前記第2電動機に電力を供給する第2蓄電装置と、
前記第2油圧ポンプの吐出圧が上昇したときに前記第2油圧ポンプの吐出流量を減少させることで前記第2油圧ポンプの吸収馬力が第2許容値を超えないように制御する第2馬力制御装置と、
前記第1及び第2蓄電装置の蓄電状態がそれぞれ等しくなるように前記第1及び第2馬力制御装置の前記第1及び第2許容値を変更する馬力配分制御装置とを備えることを特徴とする電動式油圧作業機械の油圧駆動装置。 - 請求項1記載の電動式油圧作業機械の油圧駆動装置において、
前記第1及び第2油圧ポンプは、それぞれ、固定容量型の油圧ポンプであり、
前記第1及び第2馬力制御装置は、それぞれ、前記第1及び第2油圧ポンプの回転数を制御することで、前記馬力配分制御装置によって変更された前記第1及び第2許容値を超えないように前記第1及び第2油圧ポンプの吸収馬力を制御することを特徴とする電動式油圧作業機械の油圧駆動装置。 - 請求項1記載の電動式油圧作業機械の油圧駆動装置において、
前記第1及び第2油圧ポンプは、それぞれ、可変容量型の油圧ポンプであり、
前記第1及び第2馬力制御装置は、それぞれ、前記第1及び第2油圧ポンプの容量を制御することで、前記馬力配分制御装置によって変更された前記第1及び第2許容値を超えないように前記第1及び第2油圧ポンプの吸収馬力を制御することを特徴とする電動式油圧作業機械の油圧駆動装置。 - 請求項1記載の電動式油圧作業機械の油圧駆動装置において、
前記複数のアクチュエータの動作を指令する複数の操作装置と、
前記複数の操作装置の少なくとも1つが操作されたとき、前記第1油圧ポンプの吐出圧が前記複数のアクチュエータの最高負荷圧より目標差圧だけ高くなるよう、前記第1油圧ポンプの吐出流量を制御するロードセンシング制御を行う第1流量制御装置と、
前記複数の操作装置の少なくとも1つが操作されたとき、前記第2油圧ポンプの吐出圧が前記複数のアクチュエータの最高負荷圧より目標差圧だけ高くなるよう、前記第2油圧ポンプの吐出流量を制御するロードセンシング制御を行う第2流量制御装置を更に備え、
前記第1及び第2流量制御装置は、それぞれ、前記第1及び第2油圧ポンプの回転数を制御することで、前記第1及び第2油圧ポンプの吐出圧が前記複数のアクチュエータの最高負荷圧より目標差圧だけ高くなるよう前記第1及び第2油圧ポンプの吐出流量を制御し、
前記第1及び第2馬力制御装置は、それぞれ、前記第1及び第2油圧ポンプの吸収馬力が前記第1及び第2許容値を超えないように、前記ロードセンシング制御により制御される前記第1及び第2油圧ポンプの吐出流量を制御することを特徴とする電動式油圧作業機械の油圧駆動装置。 - 請求項1記載の電動式油圧作業機械の油圧駆動装置において、
前記複数のアクチュエータの動作を指令する複数の操作装置と、
前記複数の操作装置の少なくとも1つが操作されたとき、その操作装置による要求流量が増加するにしたがって前記第1油圧ポンプの吐出流量を制御するポジティブ流量制御を行う第1流量制御装置と、
前記複数の操作装置の少なくとも1つが操作されたとき、その操作装置による要求流量が増加するにしたがって前記第2油圧ポンプの吐出流量を制御するポジティブ流量制御を行う第2流量制御装置とを更に備え、
前記第1及び第2流量制御装置は、それぞれ、前記第1及び第2油圧ポンプの回転数を制御することで、前記要求流量が増加するにしたがって前記第1及び第2油圧ポンプの吐出流量を制御し、
前記第1及び第2馬力制御装置は、それぞれ、前記第1及び第2油圧ポンプの吸収馬力が前記第1及び第2許容値を超えないように、前記ポジティブ流量制御により制御される前記第1及び第2油圧ポンプの吐出流量を制御することを特徴とする電動式油圧作業機械の油圧駆動装置。 - 請求項1記載の電動式油圧作業機械の油圧駆動装置において、
前記馬力配分制御装置は、
前記第1蓄電装置の蓄電状態を推定する第1蓄電状態推定部と、
前記第2蓄電装置の蓄電状態を推定する第2蓄電状態推定部と、
前記第1蓄電状態推定部によって推定された前記第1蓄電装置の蓄電状態が前記第2蓄電状態推定部によって推定された前記第2蓄電装置の蓄電状態より少ないときは、前記第1油圧ポンプの吸収馬力を減少させるための第1馬力制御量を演算し、前記第2蓄電状態推定部によって推定された前記第2蓄電装置の蓄電状態が前記第1蓄電状態推定部によって推定された前記第1蓄電装置の蓄電状態より少ないときは、前記第2油圧ポンプの吸収馬力を減少させるための第2馬力制御量を演算する馬力制御量演算部と、
前記馬力制御量演算部によって演算された前記第1馬力制御量に基づいて前記第1馬力制御装置の前記第1許容値を変更する第1許容値変更部と、
前記馬力制御量演算部によって演算された前記第2馬力制御量に基づいて前記第2馬力制御装置の前記第2許容値を変更する第2許容値変更部とを有することを特徴とする電動式油圧作業機械の油圧駆動装置。 - 請求項1記載の電動式油圧作業機械の油圧駆動装置において、
前記第1油圧ポンプからの圧油を前記共通の圧油供給路に導く第1圧油供給路と、
前記第2油圧ポンプからの圧油を前記共通の圧油供給路に導く第2圧油供給路と、
前記第1圧油供給路に設けられ、前記共通の圧油供給路から前記第1油圧ポンプへの圧油の流れを阻止する第1チェック弁と、
前記第2圧油供給路に設けられ、前記共通の圧油供給路から前記第2油圧ポンプへの圧油の流れを阻止する第2チェック弁とを更に備えることを特徴とする電動式油圧作業機械の油圧駆動装置。 - 請求項1記載の電動式油圧作業機械の油圧駆動装置において、
前記複数のアクチュエータの動作を指令する複数の操作装置の元圧であるパイロット1次圧を生成する固定容量型のパイロットポンプと、
前記第1及び第2蓄電装置の一方によって電力が供給され、前記パイロットポンプを駆動する第3電動機と、
前記パイロットポンプにより生成されるパイロット1次圧が目標圧力と等しくなるよう前記第3電動機の回転数を制御するパイロットポンプ制御装置とを更に備えることを特徴とする電動式油圧作業機械の油圧駆動装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017047817A JP6596458B2 (ja) | 2017-03-13 | 2017-03-13 | 電動式油圧作業機械の油圧駆動装置 |
| EP18767847.9A EP3489424B1 (en) | 2017-03-13 | 2018-03-13 | Hydraulic drive device for electric hydraulic work machine |
| US16/327,115 US10697150B2 (en) | 2017-03-13 | 2018-03-13 | Hydraulic drive system for electrically-driven hydraulic work machine |
| PCT/JP2018/009830 WO2018168887A1 (ja) | 2017-03-13 | 2018-03-13 | 電動式油圧作業機械の油圧駆動装置 |
| CN201880003121.8A CN109790699B (zh) | 2017-03-13 | 2018-03-13 | 电动式液压作业机械的液压驱动装置 |
| KR1020197003923A KR102127995B1 (ko) | 2017-03-13 | 2018-03-13 | 전동식 유압 작업 기계의 유압 구동 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017047817A JP6596458B2 (ja) | 2017-03-13 | 2017-03-13 | 電動式油圧作業機械の油圧駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018150728A JP2018150728A (ja) | 2018-09-27 |
| JP2018150728A5 JP2018150728A5 (ja) | 2019-02-07 |
| JP6596458B2 true JP6596458B2 (ja) | 2019-10-23 |
Family
ID=63522235
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017047817A Active JP6596458B2 (ja) | 2017-03-13 | 2017-03-13 | 電動式油圧作業機械の油圧駆動装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10697150B2 (ja) |
| EP (1) | EP3489424B1 (ja) |
| JP (1) | JP6596458B2 (ja) |
| KR (1) | KR102127995B1 (ja) |
| CN (1) | CN109790699B (ja) |
| WO (1) | WO2018168887A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| LT4218378T (lt) * | 2018-03-08 | 2024-06-25 | Precision Planting Llc | Žemės ūkio sodinamosios mašinos sėjos sekcija su skysčio reguliavimo sistema |
| EP4036408B1 (en) * | 2019-09-24 | 2024-08-14 | Hitachi Construction Machinery Tierra Co., Ltd. | Electric hydraulic working machine |
| JP7253478B2 (ja) * | 2019-09-25 | 2023-04-06 | 日立建機株式会社 | 作業機械 |
| JP7165111B2 (ja) * | 2019-09-26 | 2022-11-02 | 株式会社日立建機ティエラ | 電動式油圧建設機械 |
| JP7274391B2 (ja) * | 2019-09-27 | 2023-05-16 | ナブテスコ株式会社 | 油圧回路 |
| US11933024B2 (en) | 2020-02-27 | 2024-03-19 | Cnh Industrial America Llc | System and method for controlling pump operating speed range of an electric work vehicle based on hydraulic fluid pressure |
| JP7319942B2 (ja) * | 2020-03-26 | 2023-08-02 | 株式会社日立建機ティエラ | 建設機械の油圧駆動装置 |
| WO2021222532A1 (en) * | 2020-05-01 | 2021-11-04 | Cummins Inc. | Distributed pump architecture for multifunctional machines |
| US20220098832A1 (en) * | 2020-09-28 | 2022-03-31 | Artisan Vehicle Systems, Inc. | Redundant Dual Pump Hydraulic System and Method for Electric Mining Machine |
| GB2604608A (en) * | 2021-03-08 | 2022-09-14 | Bamford Excavators Ltd | Hydraulic system |
| CN113107917B (zh) * | 2021-04-09 | 2023-05-23 | 三一重机有限公司 | 电液控制方法、装置及作业机械 |
| KR102288976B1 (ko) * | 2021-05-06 | 2021-08-11 | 주식회사 평강비아이엠 | 전기적 효율성이 개선된 전기유압시스템 |
| US11946225B2 (en) * | 2021-05-28 | 2024-04-02 | Caterpillar Inc. | Method and systems for controlling electrically-powered hydraulic circuits |
| CN115030248B (zh) * | 2022-06-29 | 2024-04-19 | 中联重科土方机械有限公司 | 正流量挖掘机及其破碎控制方法、破碎控制装置和控制器 |
| US20240000619A1 (en) | 2022-06-30 | 2024-01-04 | The Procter & Gamble Company | Absorbent articles and methods and apparatuses for making absorbent articles with frangible pathways |
| JP2024094638A (ja) * | 2022-12-28 | 2024-07-10 | 株式会社クボタ | 電動作業機、及び電動作業機の制御方法 |
| JP2024126696A (ja) * | 2023-03-08 | 2024-09-20 | 株式会社竹内製作所 | 作業用車両 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3969068B2 (ja) * | 2001-11-21 | 2007-08-29 | コベルコ建機株式会社 | ハイブリッド作業機械のアクチュエータ駆動装置 |
| JP2004190845A (ja) * | 2002-12-13 | 2004-07-08 | Shin Caterpillar Mitsubishi Ltd | 作業機械の駆動装置 |
| JP2004357481A (ja) * | 2003-05-30 | 2004-12-16 | Sanyo Electric Co Ltd | 複数のバッテリを充電する方法と放電する方法 |
| JP3985756B2 (ja) | 2003-09-05 | 2007-10-03 | コベルコ建機株式会社 | 建設機械の油圧制御回路 |
| JP4905300B2 (ja) | 2006-09-28 | 2012-03-28 | トヨタ自動車株式会社 | 電源システムおよびそれを備えた車両、電源システムの制御方法ならびにその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 |
| JP2008256037A (ja) | 2007-04-03 | 2008-10-23 | Hitachi Constr Mach Co Ltd | 電動式油圧作業機 |
| KR100974275B1 (ko) * | 2007-12-17 | 2010-08-06 | 볼보 컨스트럭션 이키프먼트 홀딩 스웨덴 에이비 | 소 선회식 굴삭기의 붐 충격 완화장치 및 그 제어방법 |
| CN103299005B (zh) * | 2011-02-21 | 2015-10-21 | 日立建机株式会社 | 电动式工程机械 |
| JP5662900B2 (ja) * | 2011-08-08 | 2015-02-04 | 日立建機株式会社 | 電動式建設機械 |
| WO2013058326A1 (ja) | 2011-10-20 | 2013-04-25 | 日立建機株式会社 | 電動式油圧作業機械の油圧駆動装置 |
| JP5837863B2 (ja) * | 2012-08-21 | 2015-12-24 | 日立建機株式会社 | 電動式建設機械 |
| JP2015198495A (ja) * | 2014-03-31 | 2015-11-09 | 住友重機械工業株式会社 | ショベル |
| CN106284475B (zh) * | 2016-09-19 | 2018-08-14 | 太原理工大学 | 一种双电动机驱动的液压挖掘机 |
-
2017
- 2017-03-13 JP JP2017047817A patent/JP6596458B2/ja active Active
-
2018
- 2018-03-13 WO PCT/JP2018/009830 patent/WO2018168887A1/ja unknown
- 2018-03-13 KR KR1020197003923A patent/KR102127995B1/ko active IP Right Grant
- 2018-03-13 US US16/327,115 patent/US10697150B2/en active Active
- 2018-03-13 EP EP18767847.9A patent/EP3489424B1/en active Active
- 2018-03-13 CN CN201880003121.8A patent/CN109790699B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3489424B1 (en) | 2021-10-13 |
| WO2018168887A1 (ja) | 2018-09-20 |
| EP3489424A1 (en) | 2019-05-29 |
| CN109790699B (zh) | 2021-03-16 |
| JP2018150728A (ja) | 2018-09-27 |
| KR20190026878A (ko) | 2019-03-13 |
| CN109790699A (zh) | 2019-05-21 |
| US10697150B2 (en) | 2020-06-30 |
| EP3489424A4 (en) | 2020-07-01 |
| KR102127995B1 (ko) | 2020-06-29 |
| US20190194910A1 (en) | 2019-06-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6596458B2 (ja) | 電動式油圧作業機械の油圧駆動装置 | |
| US10280592B2 (en) | Hydraulic drive system for electrically-operated hydraulic work machine | |
| US10676898B2 (en) | Hydraulic drive system of work machine | |
| KR101992510B1 (ko) | 건설 기계 | |
| JP6005176B2 (ja) | 電動式油圧作業機械の油圧駆動装置 | |
| KR101736287B1 (ko) | 건설 기계의 유압 구동 장치 | |
| EP2845954A1 (en) | Hybrid working machine | |
| US10407875B2 (en) | Control system and work machine | |
| JP6226844B2 (ja) | 建設機械の油圧駆動装置 | |
| CN113994092A (zh) | 电动式液压作业机械 | |
| KR20180022624A (ko) | 제어 시스템, 작업 기계, 및 제어 방법 | |
| JP2016061387A5 (ja) | ||
| US20180238026A1 (en) | Construction machine and method for controlling construction machine | |
| JP6518318B2 (ja) | 作業機械の油圧制御装置 | |
| JPWO2019064555A1 (ja) | 作業機械の油圧駆動装置 | |
| JP4807888B2 (ja) | 油圧駆動機械の制御装置 | |
| JP6591370B2 (ja) | 建設機械の油圧制御装置 | |
| KR102054519B1 (ko) | 건설기계의 유압시스템 | |
| JP2008224039A (ja) | 油圧駆動機械の制御装置 | |
| JP5642620B2 (ja) | 作業機械のエネルギ回生装置 | |
| JP7146669B2 (ja) | 建設機械 | |
| CN117043473A (zh) | 挖土机 | |
| JP2006002943A (ja) | 油圧駆動機械の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181219 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190930 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6596458 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |