JP6589741B2 - 画像処理装置 - Google Patents
画像処理装置 Download PDFInfo
- Publication number
- JP6589741B2 JP6589741B2 JP2016104488A JP2016104488A JP6589741B2 JP 6589741 B2 JP6589741 B2 JP 6589741B2 JP 2016104488 A JP2016104488 A JP 2016104488A JP 2016104488 A JP2016104488 A JP 2016104488A JP 6589741 B2 JP6589741 B2 JP 6589741B2
- Authority
- JP
- Japan
- Prior art keywords
- area
- width
- unit
- luminance
- region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000009467 reduction Effects 0.000 claims description 11
- 230000002093 peripheral effect Effects 0.000 claims description 10
- 238000012217 deletion Methods 0.000 claims description 4
- 230000037430 deletion Effects 0.000 claims description 4
- 238000000034 method Methods 0.000 description 33
- 230000008569 process Effects 0.000 description 14
- 239000000470 constituent Substances 0.000 description 9
- 230000006870 function Effects 0.000 description 7
- 230000014509 gene expression Effects 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 230000020509 sex determination Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images










Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/673—Focus control based on electronic image sensor signals based on contrast or high frequency components of image signals, e.g. hill climbing method
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/40—Image enhancement or restoration using histogram techniques
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Processing (AREA)
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Closed-Circuit Television Systems (AREA)
- Studio Devices (AREA)
- Image Analysis (AREA)
Description
<第1実施形態>
1.画像処理装置1の構成
画像処理装置1の構成を、図1、図2に基づき説明する。画像処理装置1は車両に搭載される車載装置である。画像処理装置1を搭載する車両を以下では自車両とする。
自車両は、画像処理装置1に加えて、カメラ33、車両信号線35、及びディスプレイ37を備える。カメラ33は、自車両の周辺を撮影し、画像を作成する。画像は複数の画素から構成される。各画素は輝度を有する。各画素の輝度は一定の輝度範囲内にある。カメラ33は画像を画像処理装置1に出力する。
画像処理装置1が所定時間ごとに繰り返し実行する処理を図3〜図10に基づき説明する。図3のステップ1では、画像取得ユニット7が、カメラ33を用いて画像を取得する。
ステップ7では、区分ユニット17が、輝度ヒストグラム43において、領域Aを決定する。領域Aとは、図7に示すように、輝度aを含む輝度の範囲であって、ヒストグラムを表す曲線における傾きの絶対値が、予め設定された閾値より大きい範囲である。領域Aは、主として、路面を表す画素の輝度を含む範囲である。路面に降雪がある場合、領域Aは、主として、路面を覆う雪を表す画素の輝度を含む範囲である。
図5のステップ31では、天候情報取得ユニット27が、車両信号線35から、天候情報を取得する。
式(2) RA=WA’/WA
式(2)においてWA’は、輝度を調整した後における領域Aの幅である。
WA、RAはそれぞれ既知の値であるので、ΔAも既知の値である。
ステップ34では、領域調整ユニット19が、輝度ヒストグラム45において、領域Xを検索する。領域Xとは、領域B〜Dのうちのいずれかの領域であって、その領域に属する画素数が予め設定された閾値以下である領域である。本実施形態では、領域Dが領域Xであるとする。
ステップ36では、前記ステップ33で算出した拡張幅ΔAが、前記ステップ35で算出した幅WXより小さいか否かを、領域調整ユニット19が判断する。拡張幅ΔAが幅WXより小さい場合はステップ37に進む。拡張幅ΔAが幅WX以上である場合はステップ39に進む。
ステップ38では、領域調整ユニット19が、第1パターンの補正テーブルを算出する。第1パターンの補正テーブルとは、図9に示すように、画像の輝度を調整する補正テーブルである。第1パターンの補正テーブルでは、領域Xを、幅ΔXだけ削除する。また、領域Aを幅ΔXだけ、領域Xの側に拡張する。拡張後の領域Aの幅WA’は、(WA+ΔX)となる。また、領域Cを、幅ΔXだけ、領域X側に移動させる。領域Cは、領域Aと領域Xとの間に存在する領域である。
ステップ40では、領域調整ユニット19が、以下の式(4)で表される幅ΔWBCを算出する。なお、幅ΔWBCは、領域Bにおける縮小幅と、領域Cにおける縮小幅との合計である。なお、縮小とは、圧縮と同義である。
式(4)において、ΔAは前記ステップ33で算出した値であり、ΔXは、前記ステップ39で算出した値である。
式(6) ΔWB/ΔWC=NB/NC
式(6)において、NBは、画像41の全画素のうち、領域Bに属する画素数であり、NCは、画像41の全画素のうち、領域Cに属する画素数である。ΔWBはΔY1に対応し、ΔWCはΔY2に対応する。
ステップ46では、領域調整ユニット19が、第2パターンの補正テーブルを算出する。第2パターンの補正テーブルとは、図10に示すように、画像の輝度を調整する補正テーブルである。
式(7)において、I0は、同じ画素の、輝度を調整する前の輝度である。KABは、輝度を調整する前の、領域Aと領域Bとの境界における輝度である。WA’は、輝度を調整した後の、領域Aの幅である。KAB’は、輝度を調整した後の、領域Aと領域Bとの境界における輝度である。
前記ステップ6で否定判断した場合はステップ12に進む。ステップ12では、前記ステップ1で取得した画像をそのままディスプレイ37に出力する。
3.画像処理装置1が奏する効果
(1A)画像処理装置1は領域Aを拡張する。そのため、領域Aにおけるコントラストを向上させることができる。そのことにより、画像の視認性が向上する。また、拡張幅ΔAのうち、少なくとも一部は、画素数が少ない領域Xを削除して得られるものである。そのため、領域B、領域Cの縮小幅を抑制することができる。その結果、輝度を調整した後でも、画像の画質が劣化しにくい。
(1C)画像処理装置1は、領域B、領域Cを縮小し、その縮小した分だけ、さらに領域Aを拡張することができる。その結果、領域Aにおけるコントラストを一層向上させることができる。
<他の実施形態>
以上、本発明を実施するための形態について説明したが、本発明は上述の実施形態に限定されることなく、種々変形して実施することができる。
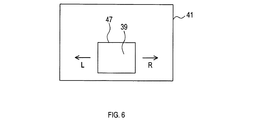
・物標が自車両に近づいていれば、判断領域39における上側の境界線47を、標準の位置より下げる。すなわち、判断領域39を、標準よりも低い範囲に限定する。
自車両が後進しており、物標が存在する場合、以下のように判断領域39を変化させる。
・物標が自車両から遠ざかっていれば、上側の境界線47の位置を、標準の位置に戻す。
(5)拡張幅ΔAが幅WXより小さい場合でも、領域Xの全てを削除してもよい。そして、拡張幅ΔAを、幅WXとすることができる。
(7)領域A以外の領域の数は適宜設定できる。その数は、例えば、2、4、5、6・・・とすることができる。
(10)判断領域決定ユニット11は、天候情報に応じて判断領域39の位置、大きさ、及び形状から成る群から選択される1以上を決定してもよい。例えば、天候が曇天の場合、それ以外の場合よりも、判断領域39の位置を下げることができる。また、天候が吹雪の場合、それ以外の場合よりも、判断領域39を大きくすることができる。また、天候が雪の場合の判断領域39の形状を、後述するデフォルトの形状より縦長とし、それ以外の場合の形状をデフォルトの形状とすることができる。
Claims (8)
- 画像処理装置(1)であって、
車両の周辺を表す画像を取得する画像取得ユニット(7)と、
前記画像の一部である判断領域(39)において、視認性が予め設定された閾値以下であるか否かを判断する視認性判断ユニット(12)と、
前記視認性が前記閾値以下であると前記視認性判断ユニットが判断した場合、前記画像における輝度を調整する輝度調整ユニット(13)と、
前記車両の周辺における状況を表す周辺情報を取得する周辺情報取得ユニット(9)と、
前記周辺情報に応じて前記判断領域の位置、大きさ、及び形状から成る群から選択される1以上を決定する判断領域決定ユニット(11)と、
を備え、
前記輝度調整ユニットは、
前記判断領域における輝度ヒストグラムにて度数が最大である輝度aを取得する輝度取得ユニット(15)と、
前記画像における輝度範囲を、前記輝度aが属する領域Aを含む複数の領域に区分する区分ユニット(17)と、
複数の前記領域のうち、属する画素数が予め設定された閾値以下である領域Xの少なくとも一部を削除する領域X削除ユニット(19)と、
前記領域Aを、少なくとも、前記領域Xにおいて削除した幅ΔXだけ、前記領域Xの側に拡張する領域A拡張ユニット(19)と、
前記領域Xと前記領域Aとの間に他の前記領域が存在する場合は、他の前記領域を前記領域Xの側に移動させる領域移動ユニット(19)と、
を備える画像処理装置。 - 請求項1に記載の画像処理装置であって、
前記周辺情報は、前記車両が走行中である道路の形状を表す情報、又は、前記車両の周辺に存在する物標を表す情報である画像処理装置。 - 画像処理装置(1)であって、
車両の周辺を表す画像を取得する画像取得ユニット(7)と、
前記画像の一部である判断領域(39)において、視認性が予め設定された閾値以下であるか否かを判断する視認性判断ユニット(12)と、
前記視認性が前記閾値以下であると前記視認性判断ユニットが判断した場合、前記画像における輝度を調整する輝度調整ユニット(13)と、
天候情報を取得する天候情報取得ユニットと、
前記天候情報に応じて前記判断領域の位置、大きさ、及び形状から成る群から選択される1以上を決定する判断領域決定ユニット(11)と、
を備え、
前記輝度調整ユニットは、
前記判断領域における輝度ヒストグラムにて度数が最大である輝度aを取得する輝度取得ユニット(15)と、
前記画像における輝度範囲を、前記輝度aが属する領域Aを含む複数の領域に区分する区分ユニット(17)と、
複数の前記領域のうち、属する画素数が予め設定された閾値以下である領域Xの少なくとも一部を削除する領域X削除ユニット(19)と、
前記領域Aを、少なくとも、前記領域Xにおいて削除した幅ΔXだけ、前記領域Xの側に拡張する領域A拡張ユニット(19)と、
前記領域Xと前記領域Aとの間に他の前記領域が存在する場合は、他の前記領域を前記領域Xの側に移動させる領域移動ユニット(19)と、
を備える画像処理装置。 - 画像処理装置(1)であって、
車両の周辺を表す画像を取得する画像取得ユニット(7)と、
前記画像の一部である判断領域(39)において、視認性が予め設定された閾値以下であるか否かを判断する視認性判断ユニット(12)と、
前記視認性が前記閾値以下であると前記視認性判断ユニットが判断した場合、前記画像における輝度を調整する輝度調整ユニット(13)と、
天候情報を取得する天候情報取得ユニットと、
前記天候情報に応じて前記視認性の判断における前記閾値を設定する閾値設定ユニットと、
を備え、
前記輝度調整ユニットは、
前記判断領域における輝度ヒストグラムにて度数が最大である輝度aを取得する輝度取得ユニット(15)と、
前記画像における輝度範囲を、前記輝度aが属する領域Aを含む複数の領域に区分する区分ユニット(17)と、
複数の前記領域のうち、属する画素数が予め設定された閾値以下である領域Xの少なくとも一部を削除する領域X削除ユニット(19)と、
前記領域Aを、少なくとも、前記領域Xにおいて削除した幅ΔXだけ、前記領域Xの側に拡張する領域A拡張ユニット(19)と、
前記領域Xと前記領域Aとの間に他の前記領域が存在する場合は、他の前記領域を前記領域Xの側に移動させる領域移動ユニット(19)と、
を備える画像処理装置。 - 請求項1〜4のいずれか1項に記載の画像処理装置であって、
前記輝度調整ユニットは、複数の前記領域のうち、前記領域A以外の領域である領域Yを幅ΔYだけ縮小する領域Y縮小ユニット(19)をさらに備え、
前記領域A拡張ユニットは、少なくとも、前記幅ΔXと前記幅ΔYとの和だけ前記領域Aを拡張するように構成された画像処理装置。 - 請求項5に記載の画像処理装置であって、
少なくとも前記領域Aの拡張幅である拡張幅ΔAに応じて、前記幅ΔYを設定する縮小幅設定ユニット(19)をさらに備える画像処理装置。 - 請求項6に記載の画像処理装置であって、
前記領域Y縮小ユニットは、一方の側において前記領域Aに隣接する領域Y1を幅ΔY1だけ縮小するとともに、他方の側において前記領域Aに隣接する領域Y2を幅ΔY2だけ縮小するように構成され、
前記領域A拡張ユニットは、少なくとも、前記幅ΔXと前記幅ΔY1と前記幅ΔY2との和だけ前記領域Aを拡張するように構成され、
前記幅ΔY1と前記幅ΔY2との比率は、以下の式(1)で表される画像処理装置。
式(1) ΔY1/ΔY2=N1/N2
前記N1は前記領域Y1に属する画素数であり、前記N2は前記領域Y2に属する画素数である。 - 請求項7に記載の画像処理装置であって、
前記縮小幅設定ユニットは、予め決められた上限値以下の範囲で、前記幅ΔY1及び前記幅ΔY2を設定するように構成された画像処理装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016104488A JP6589741B2 (ja) | 2016-05-25 | 2016-05-25 | 画像処理装置 |
| DE112017002664.4T DE112017002664T5 (de) | 2016-05-25 | 2017-05-25 | Bildverarbeitungsvorrichtung |
| PCT/JP2017/019585 WO2017204304A1 (ja) | 2016-05-25 | 2017-05-25 | 画像処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016104488A JP6589741B2 (ja) | 2016-05-25 | 2016-05-25 | 画像処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017212597A JP2017212597A (ja) | 2017-11-30 |
| JP6589741B2 true JP6589741B2 (ja) | 2019-10-16 |
Family
ID=60412387
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016104488A Active JP6589741B2 (ja) | 2016-05-25 | 2016-05-25 | 画像処理装置 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6589741B2 (ja) |
| DE (1) | DE112017002664T5 (ja) |
| WO (1) | WO2017204304A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7284280B2 (ja) * | 2019-09-24 | 2023-05-30 | 株式会社日立国際電気 | 監視カメラシステム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003250042A (ja) * | 2002-02-25 | 2003-09-05 | Minolta Co Ltd | 画像処理方法及び画像処理装置及びデジタルカメラ |
| JP2006092168A (ja) * | 2004-09-22 | 2006-04-06 | Konica Minolta Photo Imaging Inc | 画像処理方法、画像処理装置及び画像処理プログラム |
| JP2008172677A (ja) * | 2007-01-15 | 2008-07-24 | Murata Mach Ltd | 画像処理装置および地色検出方法 |
| JP2011228857A (ja) * | 2010-04-16 | 2011-11-10 | Clarion Co Ltd | 車載カメラ用キャリブレーション装置 |
| JP5423631B2 (ja) * | 2010-09-24 | 2014-02-19 | 株式会社デンソー | 画像認識装置 |
| JP5435307B2 (ja) | 2011-06-16 | 2014-03-05 | アイシン精機株式会社 | 車載カメラ装置 |
| CN103188433B (zh) * | 2011-12-30 | 2016-01-20 | 株式会社日立制作所 | 图像除雾装置和图像除雾方法 |
| JP2013186872A (ja) * | 2012-03-12 | 2013-09-19 | Mitsubishi Electric Corp | 運転支援装置 |
| JP6329438B2 (ja) * | 2014-06-12 | 2018-05-23 | 株式会社Subaru | 車外環境認識装置 |
| JP6146499B2 (ja) | 2016-03-02 | 2017-06-14 | 栗田工業株式会社 | アンモニア含有排水の処理方法 |
-
2016
- 2016-05-25 JP JP2016104488A patent/JP6589741B2/ja active Active
-
2017
- 2017-05-25 DE DE112017002664.4T patent/DE112017002664T5/de active Pending
- 2017-05-25 WO PCT/JP2017/019585 patent/WO2017204304A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017204304A1 (ja) | 2017-11-30 |
| DE112017002664T5 (de) | 2019-03-14 |
| JP2017212597A (ja) | 2017-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6323018B2 (ja) | 運転支援装置 | |
| JP4584120B2 (ja) | 道路区画線検出装置、道路区画線の検出方法、道路区画線の検出プログラム | |
| US10315570B2 (en) | Image processing apparatus and image processing method | |
| US20150367781A1 (en) | Lane boundary estimation device and lane boundary estimation method | |
| JP2014115978A (ja) | 移動物体認識装置及びこれを用いた報知装置及びその移動物体認識装置に用いる移動物体認識用プログラム及び移動物体認識装置を備えた移動体 | |
| JP2015219773A (ja) | 物体検出装置、運転支援装置、物体検出方法、および物体検出プログラム | |
| US11270133B2 (en) | Object detection device, object detection method, and computer-readable recording medium | |
| JP6711395B2 (ja) | 画像処理装置、撮像装置、移動体機器制御システム、移動体、画像処理方法、及びプログラム | |
| JP5966513B2 (ja) | 車両の後側方撮影装置 | |
| JP2006318272A (ja) | 車両用物体検出装置、および方法 | |
| JP6152261B2 (ja) | 車載用駐車枠認識装置 | |
| JP5262515B2 (ja) | 車両用表示装置および表示方法 | |
| JP2018169888A (ja) | 道路パラメータ推定装置 | |
| JP6589741B2 (ja) | 画像処理装置 | |
| WO2019034916A1 (en) | SYSTEM AND METHOD FOR PRESENTING AND CONTROLLING VIRTUAL CAMERA IMAGE FOR A VEHICLE | |
| CN115147580A (zh) | 图像处理装置、图像处理方法、移动装置和存储介质 | |
| JP2013186872A (ja) | 運転支援装置 | |
| JP2013160895A (ja) | カメラ露出設定装置 | |
| US20140316659A1 (en) | Airbag control apparatus and method for controlling airbag device of vehicle | |
| JP5235843B2 (ja) | 車両周辺監視装置および車両周辺監視方法 | |
| JP2019140518A (ja) | 画像生成装置 | |
| JP5919988B2 (ja) | 画像処理装置 | |
| JP6785172B2 (ja) | 車両用映像表示装置 | |
| KR101759270B1 (ko) | 차량 후보 검출 장치 및 그 방법 | |
| JP7354773B2 (ja) | 物体検出装置、物体検出方法、及び物体検出プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180507 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190514 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190606 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190820 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190902 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6589741 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |