JP6576216B2 - 処理装置、検査装置および位置ずれ量特定方法 - Google Patents
処理装置、検査装置および位置ずれ量特定方法 Download PDFInfo
- Publication number
- JP6576216B2 JP6576216B2 JP2015220013A JP2015220013A JP6576216B2 JP 6576216 B2 JP6576216 B2 JP 6576216B2 JP 2015220013 A JP2015220013 A JP 2015220013A JP 2015220013 A JP2015220013 A JP 2015220013A JP 6576216 B2 JP6576216 B2 JP 6576216B2
- Authority
- JP
- Japan
- Prior art keywords
- probing
- probe
- processing
- dent
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Measuring Leads Or Probes (AREA)
- Tests Of Electronic Circuits (AREA)
Description
3 プロービング機構
5a,5b 撮像部
6 測定部
7 制御部
41 プローブ
41a 先端部
100 基板
100a 表面
200 テスト基板
201 打痕シート
201a 表面
C 図心
E 位置ずれ量
G 撮像画像
Pc プロービング位置
Pp 規定位置
Ps 打痕位置
S 打痕
Claims (5)
- プロービング機構にプローブのプロービングを実行させて保持位置に保持されたプロービング対象の被接触面における規定位置に対して当該プローブの先端部を接触させる際の当該先端部が実際に位置するプロービング位置と当該規定位置との位置ずれ量を特定する特定処理を実行する処理装置であって、
前記保持位置に保持された前記プロービング対象の前記被接触面を撮像する撮像部と、
前記保持位置に保持させた前記プロービング対象としての打痕シートの前記被接触面における前記規定位置に対して前記プロービング機構に前記プロービングを実行させたときに生じる打痕の前記撮像部によって撮像された画像を用いて前記特定処理を実行する処理部とを備え、
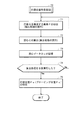
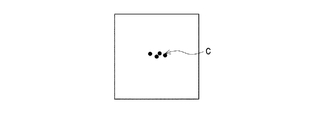
前記処理部は、前記特定処理において、前記画像を画像処理することによって前記打痕の形状の図心の位置を算出する算出処理を複数回実行し、前記各算出処理によって算出した複数の図心の位置を統計処理して求めた処理位置を前記プロービング位置として前記位置ずれ量を特定する処理装置。 - 前記処理部は、前記統計処理として前記複数の図心の位置を示す座標を相加平均して前記処理位置を求める請求項1記載の処理装置。
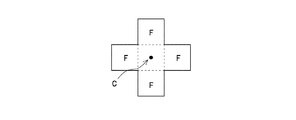
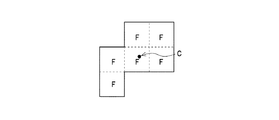
- 前記処理部は、前記画像処理において、前記画像を構成する画素の中から前記打痕を構成する画素を抽出し、当該抽出した画素の外周で規定される形状を前記打痕の形状として前記図心の位置を算出する請求項1または2記載の処理装置。
- 請求項1から3のいずれかに記載の処理装置と、前記プロービング機構と、当該プロービング機構を制御する制御部と、前記プローブを介して入出力する電気信号に基づいて物理量を測定する測定部と、当該測定部によって測定された前記物理量に基づいて前記プロービング対象を検査する検査部とを備えている検査装置。
- プロービング機構にプローブのプロービングを実行させて保持位置に保持されたプロービング対象の被接触面における規定位置に対して当該プローブの先端部を接触させる際の当該先端部が実際に位置するプロービング位置と当該規定位置との位置ずれ量を特定する位置ずれ量特定方法であって、
前記保持位置に保持させた前記プロービング対象としての打痕シートの前記被接触面における前記規定位置に対して前記プロービング機構に前記プロービングを実行させたときに生じる打痕の画像を撮像し、当該画像を画像処理することによって前記打痕の形状の図心の位置を算出する算出処理を複数回実行し、前記各算出処理によって算出した複数の図心の位置を統計処理して求めた処理位置を前記プロービング位置として前記位置ずれ量を特定する位置ずれ量特定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015220013A JP6576216B2 (ja) | 2015-11-10 | 2015-11-10 | 処理装置、検査装置および位置ずれ量特定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015220013A JP6576216B2 (ja) | 2015-11-10 | 2015-11-10 | 処理装置、検査装置および位置ずれ量特定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017090227A JP2017090227A (ja) | 2017-05-25 |
| JP6576216B2 true JP6576216B2 (ja) | 2019-09-18 |
Family
ID=58771520
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015220013A Active JP6576216B2 (ja) | 2015-11-10 | 2015-11-10 | 処理装置、検査装置および位置ずれ量特定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6576216B2 (ja) |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3012726B2 (ja) * | 1991-12-04 | 2000-02-28 | ロイヤルコントロールズ株式会社 | フェルール偏芯検査装置 |
| JPH0829489A (ja) * | 1994-07-18 | 1996-02-02 | Hioki Ee Corp | X−y方式インサーキットテスタのプローブ間誤差補正方法 |
| US6710798B1 (en) * | 1999-03-09 | 2004-03-23 | Applied Precision Llc | Methods and apparatus for determining the relative positions of probe tips on a printed circuit board probe card |
| KR20100089131A (ko) * | 2009-02-03 | 2010-08-12 | 삼성전자주식회사 | 프로버의 위치 보정 방법 및 이를 수행하기 위한 장치 |
-
2015
- 2015-11-10 JP JP2015220013A patent/JP6576216B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017090227A (ja) | 2017-05-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102106349B1 (ko) | 인쇄 회로 기판 검사 장치, 솔더 페이스트 이상 감지 방법 및 컴퓨터 판독 가능한 기록 매체 | |
| US9743527B2 (en) | Stencil programming and inspection using solder paste inspection system | |
| JP2013164381A (ja) | 基板検査装置のアライメント方法及び基板検査装置 | |
| JP6112896B2 (ja) | 基板検査装置および補正情報取得方法 | |
| JP2017015396A5 (ja) | ||
| JP5875811B2 (ja) | 基板検査装置および補正情報取得方法 | |
| JP6550240B2 (ja) | 塗布剤検査方法、塗布剤検査装置、塗布剤検査用プログラム、およびそのプログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP6576216B2 (ja) | 処理装置、検査装置および位置ずれ量特定方法 | |
| JP2009019907A (ja) | 検査装置 | |
| JP6277347B2 (ja) | 可撓性回路基板を対象とする検査装置及び検査方法 | |
| CN111397778A (zh) | 应力检测方法、装置及系统 | |
| JP5955736B2 (ja) | 基板検査装置および補正情報取得方法 | |
| JP2013011569A (ja) | 変位量特定装置、変位量特定方法および変位量特定プログラム | |
| JPH08262114A (ja) | 回路基板検査装置におけるプローブの移動制御方法 | |
| JP2009294155A (ja) | アームオフセット取得方法 | |
| JP6999327B2 (ja) | 基板検査装置 | |
| JP6498564B2 (ja) | 処理装置、基板検査装置、処理方法および基板検査方法 | |
| JP2013053968A (ja) | 基板検査装置および補正情報取得方法 | |
| JPH07140088A (ja) | 回路基板検査装置における外観検査用カメラの単位移動量補正方法 | |
| JP2016102772A (ja) | 基板検査装置および基板検査方法 | |
| JP2009186330A (ja) | 振動検出方法、外観検査方法、およびこれらの装置 | |
| JP4311240B2 (ja) | 半田検査装置および半田検査方法 | |
| JP6058325B2 (ja) | 基板検査装置および基板検査方法 | |
| JPH0829489A (ja) | X−y方式インサーキットテスタのプローブ間誤差補正方法 | |
| JP6794215B2 (ja) | 基板検査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180920 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190730 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190820 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6576216 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |