JP6567204B2 - 減速機 - Google Patents
減速機 Download PDFInfo
- Publication number
- JP6567204B2 JP6567204B2 JP2018563532A JP2018563532A JP6567204B2 JP 6567204 B2 JP6567204 B2 JP 6567204B2 JP 2018563532 A JP2018563532 A JP 2018563532A JP 2018563532 A JP2018563532 A JP 2018563532A JP 6567204 B2 JP6567204 B2 JP 6567204B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- housing
- shaft
- fixed
- fixed housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/28—Toothed gearings for conveying rotary motion with gears having orbital motion
- F16H1/32—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear
Description
一方で、減速機の出力軸の角度を測定する目的のため、複数のセンサをあらゆる角度に備える技術が公開されている(例えば特許文献2参照)。
その代替手法として、例えば減速機は出力軸にフォトインタラプタを備えることで角度の原点を測定し、更に入力であるモータの軸にインクリメンタルエンコーダを備えることで回転の回数を測定することで出力軸の絶対角度が導出できる。若しくは例えば、減速機は出力軸の一部を、中空構造とした入力軸から取り出す構造を有し、入力軸側に配されたアブソリュートエンコーダが出力軸の絶対角度測定を行うことができる。しかし、これらの代替手法を用いても、同様に、外部に備えるセンサや治具、入力軸の中空構造化やパーツの増加によるコスト増加が引き起こされる。
モータの出力がされる軸に接続して設けられ、前記出力を受け回転するシャフトと、
所定の設置部材に固定されて設けられ、前記シャフトを支持する固定ハウジングと、
前記固定ハウジングの外周に設けられ、前記シャフトの回転に基づいて回転する回転ハウジングと、
を備える。
即ち、以下、前述の特許文献1及び2のような、モータ等から回転が入力される軸(以下、「入力軸」と呼ぶことがある)と減速された回転が出力される軸(以下、「出力軸」と呼ぶことがある)とを同一軸上に有するサイクロイド減速機において、入力軸と出力軸とが回転する中心軸を「軸AZ」と呼ぶ。また、軸AZの方向に3次元直交座標系のZ軸をとり、入力軸がある側を「Zが負の方向の側」又は「入力軸側」と呼び、出力軸がある側を「Zが正の方向の側」又は「出力軸側」と呼ぶ。また、3次元直交座標系におけるZ軸と直交する面(即ちX−Y平面)上において、軸AZから離れる方向を「外周(の方向)」又は「外側」と呼び、その逆を「内側」と適宜呼ぶ。
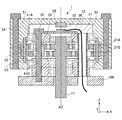
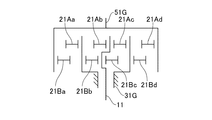
図2は、図1のサイクロイド減速機についての、軸AZと直角に交わりZ座標が一定の平面、即ちX−Y平面の断面図である。
なお、以下、曲線板21A,21Bを個々に区別する必要がない場合、これらをまとめて「曲線板21」と呼ぶ。ベアリング41A,41Bを個々に区別する必要がない場合、これらをまとめて「ベアリング41」と呼ぶ。
偏心シャフト11は、偏心シャフトベアリング12を支持する。また、固定ハウジング31は、固定ハウジング締結ボルト32と、固定ハウジングローラ33と、中空シャフト34と、センサ35と、センサケーブル36とを支持する。回転ハウジング51は、回転ハウジングローラ52と、回転ハウジングローラピン53と、回転ハウジング締結ボルト54と、センサ用磁石55とを支持する。
ここで、「ハウジング」とは、他のパーツを支持する機能と、同時に夫々を保護する容器としての機能を有するものである。即ち、固定ハウジング31及び回転ハウジング51の夫々は、これらの機能を有している。
以下、サイクロイド減速機1のセンサを露出した状態、即ちサイクロイド減速機1の回転ハウジング51を分割された内側の構成について説明する。
図4は、サイクロイド減速機1の分割された回転ハウジング51の内側の構成を示す図である。即ち、図3は、取り外された回転ハウジング51をZが負の方向から視た図となっている。
ただし、サイクロイド減速機1に回転運動を入力する、即ち一定の剛性が必要である偏心シャフト11を中空構造とすることは、さらなるコストがかかる。従って、孔部は偏心シャフト11ではなく、外周に設けるのが好適である。
一方でクロスローラベアリングは、ボールベアリング等と比較して高価である。従って、例えば、ベアリングのコストを削減する場合、サイクロイド減速機1は2つ以上のベアリング41を備える構造とするのが好適である。
即ち、本発明が適用される減速機(例えば図1等のサイクロイド減速機1)は、
モータの出力がされる軸に接続して設けられ、前記出力を受け回転するシャフト(例えば図1等の偏心シャフト11)と、
所定の設置部材(例えば図1の設置部材SM)に固定されて設けられ、前記シャフトを支持する固定ハウジング(例えば図1等の固定ハウジング31)と、
前記固定ハウジングの外周に設けられ、前記シャフトの回転に基づいて回転する回転ハウジング(例えば図1等の回転ハウジング51)と、
を備える減速機であれば足りる。
をさらに備えることができる。
をさらに備えることができる。
を更に備え、
前記センサの線は前記孔部を通して設けることができる。
前記センサ用磁石は、磁気式アブソリュートエンコーダ用磁石であることができる。
Claims (5)
- モータの出力がされる軸に接続して設けられ、前記出力を受け回転する第1シャフトと、
孔を有し、前記第1シャフトからの入力により摺動する曲線板と、
所定の設置部材に固定されて設けられ、前記第1シャフトを支持する固定ハウジングと、
前記固定ハウジングに対して固定され、有線式のセンサのケーブルを通す中空の第2シャフトと、
前記曲線板、及び前記固定ハウジングの外周に設けられ、前記第1シャフトの回転に基づいて回転する回転ハウジングと、
を備え、
前記第2シャフトは、前記曲線板の前記孔の内側において、当該曲線板が搖動した場合であっても当該曲線板に接触しない態様で配置されている、
減速機。 - 前記設置部材に前記固定ハウジングを固定する固定手段と、
前記固定手段を介して前記固定ハウジングに取り付けられたローラと、
をさらに備え、
前記第2シャフトは、前記固定手段及び前記ローラの同一円周上に配置され、前記固定手段及び前記ローラと置き換えを可能とし、かつ前記ローラよりも細い形状で構成されていることで前記曲線板に接触しない、
請求項1に記載の減速機。 - 前記回転ハウジングに設けられた前記センサに対応するセンサ用磁石、
を更に備える請求項1又は2に記載の減速機。 - 前記センサは、磁気式アブソリュートエンコーダであり、
前記センサ用磁石は、磁気式アブソリュートエンコーダ用磁石である、
請求項1乃至3の何れか1項に記載の減速機。 - 前記回転ハウジングは、複数のベアリングを介して前記固定ハウジングにより支持される、
請求項1乃至4の何れか1項に記載の減速機。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017143792 | 2017-07-25 | ||
| JP2017143792 | 2017-07-25 | ||
| PCT/JP2018/027923 WO2019022147A1 (ja) | 2017-07-25 | 2018-07-25 | 減速機 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019139580A Division JP2019215084A (ja) | 2017-07-25 | 2019-07-30 | 減速機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2019022147A1 JPWO2019022147A1 (ja) | 2019-07-25 |
| JP6567204B2 true JP6567204B2 (ja) | 2019-08-28 |
Family
ID=65041361
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018563532A Active JP6567204B2 (ja) | 2017-07-25 | 2018-07-25 | 減速機 |
| JP2019139580A Pending JP2019215084A (ja) | 2017-07-25 | 2019-07-30 | 減速機 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019139580A Pending JP2019215084A (ja) | 2017-07-25 | 2019-07-30 | 減速機 |
Country Status (2)
| Country | Link |
|---|---|
| JP (2) | JP6567204B2 (ja) |
| WO (1) | WO2019022147A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102418818B1 (ko) * | 2021-09-28 | 2022-07-11 | 주식회사 민트로봇 | 감속기 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220039645A (ko) * | 2019-08-02 | 2022-03-29 | 니탄 밸브 가부시키가이샤 | 감속기 |
| CN110932032B (zh) * | 2020-01-06 | 2020-08-14 | 江苏众富智能电气研究院有限公司 | 一种输电导线保养处理设备 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5942533Y2 (ja) * | 1975-07-30 | 1984-12-12 | (株) 浅野歯車工作所 | 減速機 |
| JP2845970B2 (ja) * | 1989-08-22 | 1999-01-13 | 帝人製機株式会社 | 割出し装置 |
| JP2001179575A (ja) * | 1999-12-22 | 2001-07-03 | Mori Seiki Co Ltd | 割出装置 |
| JP2011149924A (ja) * | 2009-09-29 | 2011-08-04 | Nippon Seiki Co Ltd | 変速位置検出装置 |
| WO2012029756A1 (ja) * | 2010-08-31 | 2012-03-08 | 株式会社ジェイテクト | 多段減速機 |
| JP2012068049A (ja) * | 2010-09-21 | 2012-04-05 | Harmonic Drive Syst Ind Co Ltd | 磁気式アブソリュートエンコーダー |
| JP5840374B2 (ja) * | 2011-03-31 | 2016-01-06 | オリエンタルモーター株式会社 | アブソリュートエンコーダ装置及びモータ |
| JP2012223081A (ja) * | 2011-04-14 | 2012-11-12 | Jtekt Corp | 電動アクチュエータ及び関節装置 |
| JP5878381B2 (ja) * | 2012-01-24 | 2016-03-08 | 株式会社アイエイアイ | 多回転アブソリュートロータリーエンコーダ |
-
2018
- 2018-07-25 WO PCT/JP2018/027923 patent/WO2019022147A1/ja active Application Filing
- 2018-07-25 JP JP2018563532A patent/JP6567204B2/ja active Active
-
2019
- 2019-07-30 JP JP2019139580A patent/JP2019215084A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102418818B1 (ko) * | 2021-09-28 | 2022-07-11 | 주식회사 민트로봇 | 감속기 |
| KR20230045531A (ko) * | 2021-09-28 | 2023-04-04 | 주식회사 민트로봇 | 감속기 |
| WO2023054900A1 (ko) * | 2021-09-28 | 2023-04-06 | 주식회사 민트로봇 | 감속기 |
| US11815162B2 (en) | 2021-09-28 | 2023-11-14 | Mintrobot Co., Ltd. | Reducer |
| KR102650180B1 (ko) * | 2021-09-28 | 2024-03-22 | 주식회사 민트로봇 | 감속기 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2019022147A1 (ja) | 2019-07-25 |
| WO2019022147A1 (ja) | 2019-01-31 |
| JP2019215084A (ja) | 2019-12-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6567204B2 (ja) | 減速機 | |
| JP6817841B2 (ja) | 電動機付き減速機 | |
| EP3197026B1 (en) | Rotary actuator | |
| US7988581B2 (en) | Rotation output device | |
| US7772836B2 (en) | Device for detecting absolute angle of multiple rotation and angle detection method | |
| TWI703286B (zh) | 平板型諧波齒輪裝置 | |
| KR101194313B1 (ko) | 중공구동모듈 | |
| KR20180064976A (ko) | 휨맞물림식 기어장치 | |
| US20190203817A1 (en) | Assembly having joint-connected members and robot including the same | |
| JP6491456B2 (ja) | トラクション動力伝達装置 | |
| JP6808474B2 (ja) | ギヤ付きモータのアブソリュートエンコーダ | |
| JP5130184B2 (ja) | 回転検出器付き減速装置 | |
| KR101769307B1 (ko) | 고성능 비접촉식 엔코더를 갖춘 중공형 액츄에이터 | |
| JP4372063B2 (ja) | 偏心差動減速機 | |
| EP3255305B1 (en) | Power transmission device | |
| JP2022090472A (ja) | 回転センサ付き軸受装置 | |
| WO2018074499A1 (ja) | 無段変速機のシーブ駆動装置 | |
| JP6685459B2 (ja) | モジュール軸受及びそれを備える動力伝達装置 | |
| JP4701337B2 (ja) | 複速レゾルバ | |
| KR20160109548A (ko) | 동력전달장치 | |
| KR102288868B1 (ko) | 기어 모터 | |
| JP4839591B2 (ja) | ダイレクトドライブモータ | |
| KR100798087B1 (ko) | 감속기 장착 구동 장치 | |
| JP4727284B2 (ja) | 多回転絶対角度検出機構および検出方法 | |
| CN115347731A (zh) | 电机模组和机械臂 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181203 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20181203 |
|
| AA64 | Notification of invalidation of claim of internal priority (with term) |
Free format text: JAPANESE INTERMEDIATE CODE: A241764 Effective date: 20181218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190125 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20190222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190305 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190426 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190716 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190730 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6567204 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |