JP6516640B2 - 可動式桟橋 - Google Patents
可動式桟橋 Download PDFInfo
- Publication number
- JP6516640B2 JP6516640B2 JP2015180296A JP2015180296A JP6516640B2 JP 6516640 B2 JP6516640 B2 JP 6516640B2 JP 2015180296 A JP2015180296 A JP 2015180296A JP 2015180296 A JP2015180296 A JP 2015180296A JP 6516640 B2 JP6516640 B2 JP 6516640B2
- Authority
- JP
- Japan
- Prior art keywords
- bridge girder
- substrate
- tip
- movable
- movable pier
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Landscapes
- Bridges Or Land Bridges (AREA)
Description
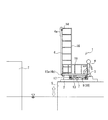
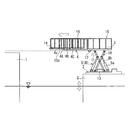
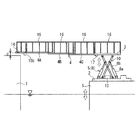
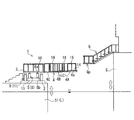
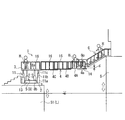
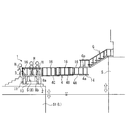
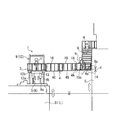
2 支持台
3 基板
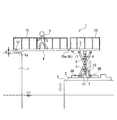
4 橋桁部
4A〜4C 分割体
4a 先端部
4b 接続端
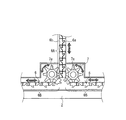
5 昇降部
6 噛合チェーン
6a、6b 駒
6A 剛体部分(互いに噛合った状態)
6B 屈曲可能部分(噛合っていない状態)
7 駆動手段
7a スプロケット
8 シリンダ機構
8a シリンダロッド
8b シリンダ
9 昇降ガイド
10 パンタグラフ型昇降ガイド
10a、10b フレーム
10c 支軸
10d〜10g 接続部
11 テレスコピック型昇降ガイド
11a〜11c 筒状体
12 ポスト式型昇降ガイド
12a 支柱
12b ガイド部
13 制御部
14 段差センサ
15a、15b ヒンジ部
15c 復元ヒンジ部
16 手摺り
17 レーザーポインタ
T 対象物
G ギャングウェイ
Gp (ギャングウェイの)突出先端部
S 船舶(ギャングウェイが設置されている船舶)
S1 別の船舶(可動式桟橋が設置されている船舶)
L 陸地
H 利用者
Claims (8)
- 支持台に対して昇降可能に支持される基板と、この基板の横方向に延在する橋桁部とを備え、この橋桁部の先端部が対象物の上方に位置した状態になって、この橋桁部を通じて前記対象物に対する人の往来を可能にする可動式桟橋であって、
前記基板を昇降させる昇降部と、前記基板の昇降移動をガイドする昇降ガイドと、前記昇降部の動作の制御を行う制御部と、前記橋桁部の先端部と前記対象物の上面との上下距離の検知を行う段差センサとを備え、前記段差センサによる検知データに基づいて、前記制御部により前記昇降部の動作の制御を行うことで前記基板の上下位置を変化させて前記上下距離を所定の許容範囲内に維持する構成にしたことを特徴とする可動式桟橋。 - 支持台に対して昇降可能に支持される基板と、この基板の横方向に延在する橋桁部とを備え、この橋桁部の先端部が船舶から突出したギャングウェイの突出先端部の下方に位置した状態になって、この橋桁部を通じて前記ギャングウェイに対する人の往来を可能にする可動式桟橋であって、
前記基板を昇降させる昇降部と、前記基板の昇降移動をガイドする昇降ガイドと、前記昇降部の動作の制御を行う制御部と、前記橋桁部の先端部と前記ギャングウェイの突出先端部の下面との上下距離の検知を行う段差センサとを備え、前記段差センサによる検知データに基づいて、前記制御部により前記昇降部の動作の制御を行うことで前記基板の上下位置を変化させて前記上下距離を所定の許容範囲内に維持する構成にしたことを特徴とする可動式桟橋。 - 前記橋桁部の長手方向の所定の位置にヒンジ部が備わり、このヒンジ部よりも先端側の部分がこのヒンジ部を中心にして、水平状態から上方に向った所定角度までの範囲内で回動可能である請求項1または2に記載の可動式桟橋。
- 前記ヒンジ部が前記橋桁部の前記基板との接続端に備わっている請求項3に記載の可動式桟橋。
- 前記ヒンジ部が前記橋桁部の先端部に備わっている請求項1を引用する請求項3に記載の可動式桟橋。
- 前記昇降部が、互いに噛合った状態では屈曲しない一体的な剛体となり、噛合っていない状態ではそれぞれが屈曲可能な一対の噛合チェーンと、この一対の噛合チェーンのそれぞれを長手方向に移動させることより、互いに噛合った状態になる長さを変化させる駆動手段とを備え、前記一対の噛合チェーンの互いに噛合った状態になっている上下方向に延在する長手方向上端部が前記基板に接続した状態になっている請求項1〜5に記載の可動式桟橋。
- 前記昇降部が、前記支持台と前記基板との間に介在して、シリンダロッドの出し入れをサーボモータ制御または油圧制御により行うシリンダ機構であり、前記シリンダロッドの先端部が前記基板または前記支持台に直接または間接的に接続した状態になっている請求項1〜5に記載の可動式桟橋。
- 前記橋桁部が、複数の分割体を長手方向に相対移動可能に接続した状態のテレスコピック構造である請求項1〜7のいずれかに記載の可動式桟橋。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015180296A JP6516640B2 (ja) | 2015-09-14 | 2015-09-14 | 可動式桟橋 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015180296A JP6516640B2 (ja) | 2015-09-14 | 2015-09-14 | 可動式桟橋 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017057553A JP2017057553A (ja) | 2017-03-23 |
| JP6516640B2 true JP6516640B2 (ja) | 2019-05-22 |
Family
ID=58391160
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015180296A Active JP6516640B2 (ja) | 2015-09-14 | 2015-09-14 | 可動式桟橋 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6516640B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107988891B (zh) * | 2017-12-29 | 2023-07-11 | 浙江省水利水电勘测设计院有限责任公司 | 一种升降移动组合式活动钢桥 |
| CN110144807B (zh) * | 2019-05-14 | 2025-04-22 | 上海市政工程设计研究总院(集团)有限公司 | 一种开启桥用高差补偿装置 |
| JP6882795B2 (ja) * | 2019-09-30 | 2021-06-02 | 村田油圧機械株式会社 | 連絡ブリッジ |
| JP6798721B1 (ja) * | 2019-09-30 | 2020-12-09 | 村田油圧機械株式会社 | 連絡ブリッジ用の水平回動アクチュエータ |
| JP6798720B1 (ja) * | 2019-09-30 | 2020-12-09 | 村田油圧機械株式会社 | 連絡ブリッジ用の伸縮アクチュエータ |
| CN116897865B (zh) * | 2023-08-23 | 2025-10-10 | 尔泊(厦门)科技有限公司 | 一种稳固加强型塑胶渔排构件 |
| CN117144780A (zh) * | 2023-09-05 | 2023-12-01 | 天津大学 | 一种具有波浪补偿功能的海上平台登临栈桥 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS523319Y2 (ja) * | 1972-09-13 | 1977-01-24 | ||
| JPS5416319B2 (ja) * | 1973-10-25 | 1979-06-21 | ||
| JPS546326A (en) * | 1977-06-15 | 1979-01-18 | Ishikawajima Harima Heavy Ind | Moving bridge |
| US4133067A (en) * | 1977-12-16 | 1979-01-09 | Bennett Ronald W | Articulating gangway |
| JPS6198692A (ja) * | 1984-10-19 | 1986-05-16 | Nippon Kokan Kk <Nkk> | 舷梯装置 |
| JPH0351404A (ja) * | 1989-07-18 | 1991-03-05 | Ishikawajima Harima Heavy Ind Co Ltd | 船客乗降装置 |
| JP2003027417A (ja) * | 2001-05-10 | 2003-01-29 | River Corporation:Kk | 桟橋と船舶間の連絡橋 |
| JP6038707B2 (ja) * | 2013-03-29 | 2016-12-07 | 株式会社椿本チエイン | 噛合チェーン式昇降装置 |
| JP2015030304A (ja) * | 2013-07-31 | 2015-02-16 | ダイハツ工業株式会社 | 自動車車体の搬送台車 |
| JP6336280B2 (ja) * | 2014-01-20 | 2018-06-06 | 東亜建設工業株式会社 | 可動式桟橋 |
-
2015
- 2015-09-14 JP JP2015180296A patent/JP6516640B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017057553A (ja) | 2017-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6516640B2 (ja) | 可動式桟橋 | |
| CN101125603B (zh) | 物品收存设备及其动作方法 | |
| CN104520211B (zh) | 堆装起重机 | |
| CN106737578B (zh) | 一种四足机器人 | |
| JP6487798B2 (ja) | 可動式桟橋 | |
| JP2008214056A (ja) | 門型リフタ | |
| JP4333720B2 (ja) | 移載装置における昇降台の取付構造 | |
| CN108583712A (zh) | 行走系统、行走方法以及建筑施工装置 | |
| CN112850511A (zh) | 一种采用便携式起重机的吊装方法 | |
| JP2006193240A (ja) | テーブル移動装置 | |
| WO2020042683A1 (zh) | 一种工业机器人检修维护装置 | |
| KR101246890B1 (ko) | 승강형 작업대 | |
| JP6092705B2 (ja) | 階段移動式足場 | |
| JP6420795B2 (ja) | 船舶旅客搭乗橋 | |
| JP2008050111A (ja) | 段差解消装置 | |
| CN106314681B (zh) | 一种浮态制造位置调整装置以及驳船 | |
| US20240067503A1 (en) | Lifting device for building steel structure hoistway and method for building steel structure hoistway | |
| TW201524883A (zh) | 巨霸型起重機的製造方法及拆解方法 | |
| KR20220022489A (ko) | 잭업리그 | |
| KR20120103177A (ko) | 차체 승강용 리프트 및 이를 구비한 프로토 타입 차체 조립용 스테이지 | |
| KR20140003918A (ko) | 중추 리미트 장치 | |
| JP2016156195A (ja) | 組立型建物用ユニットの荷卸し兼組立装置 | |
| JP4213538B2 (ja) | パレットチェンジャー | |
| KR101407984B1 (ko) | 리프터 | |
| JP4278547B2 (ja) | プールの可動床 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180517 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190319 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190416 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6516640 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |