以下、添付図面に基づいて、本発明の具体的な実施形態について詳細に説明する。但し、本発明の思想は開示される実施形態に何等制限されるものではなく、本発明の思想を理解する当業者であれば、同じ思想の範囲内において他の構成要素を追加、変更、削除などして、退歩的な他の発明や本発明の思想の範囲内に含まれる他の実施形態を容易に提案することができる筈であるが、これもまた本願発明の思想の範囲内に含まれるものであるといえる。
また、実施形態の図面に現れる同じ思想の範囲内の機能と同じ機能を有する構成要素については、同じ参照符号を附して説明する。
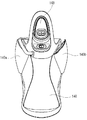
図1は、本発明の一実施形態による乗馬式フィットネス器具100の側面図である。
図1を参照すると、本発明の一実施形態による乗馬式フィットネス器具100は、本体110と、稼動軸120と、サドル140と、乗馬動作駆動部150及び駆動操作部143を備えていてもよい。
本体110は、床面に設置されるものであり、本発明の一実施形態のように上部が凸状を呈してもよく、これに加えて様々な形状を呈してもよく、乗馬動作にも拘わらず、転覆されない安定した構造を有してもよい。
前記本体110の前面には表示部165が配設されていてもよい。前記表示部165は、使用者が前記サドル140に着座した場合、前記表示部165を用いて乗馬式フィットネス器具100の動作、状態などの各種の情報を認識するように構成されてもよく、或いは、前記表示部165がタッチスクリーンなどにより構成されて使用者がメニューなどを選択するように構成されてもよい。
一方、稼動軸120は、本体110の内部に上下及び前後にチルト動作可能なように垂直に配設されていてもよい。
換言すると、前記稼動軸120は後述するサドル140の下部に連結されて、サドル140が上下及び前後にチルト動作可能なように前記本体110内に配設されていてもよい。
図2から図4を参照すると、前記稼動軸120は、乗馬動作駆動部150に連結されてもよい。また、前記稼動軸120は、下端が密封され、内側にコイルばね122が配設されるシリンダー121と、前記シリンダー121の内側に嵌入して前記コイルばね122を上側から下方に向かって圧縮可能なように移動自在に配設されるピストン123と、 前記ピストン123から上方に延びて前記シリンダー121及び本体110から上方に突出するように設けられるシャフト124と、を備えていてもよい。
このとき、前記シリンダー121には、ピストン123の上下動により吸気及び排気が発生するように吸排気孔125が形成されていてもよい。
一方、前記コイルばね122は、例えば、圧縮ばねであってもよい。
また、吸排気孔125は、シリンダー121におけるピストン123の上下動経路の上に多数形成されていてもよいが、図2に示すように、上部及び下部にそれぞれ一つずつ2つ形成されていてもよい。
稼動軸120は、シリンダー121の内側の底面にコイルばね122が嵌め込まれるガイド軸126に垂直になるように配設されていてもよい。
このとき、ピストン123が最高の位置に達したとき、コイルばね122及びピストン123は互いに離れていてもよく、ピストン123の底面にゴム製や合成樹脂製又はシリコン製などのパッキン部材127が固定されてもよい。
更に、稼動軸120は、ピストン123及びシャフト124間の連結を媒介するために、ピストン123の内側にシャフト124と螺合されるための螺合部材128が設けられていてもよい。
ここで、螺合部材128の断面が縮まる部分の外周面にブッシュ129が取り付けられていてもよい。また、シャフト124の周りに位置する無給油ブッシュ129aがシリンダー121の上端に配設されていてもよく、シャフト124が本体110に設けられるガイド部材111により上下及び前後にチルト可能なようにガイドされてもよい。ここで、ガイド部材111は、例えば、リング状を呈してもよく、本体110の上端の開放側に前後にチルト可能なように蝶合されてもよく、シャフト124の上下動により摺動が円滑に行われるように軸受けやローラーなどが設けられていてもよい。
図5及び図6を参照すると、前記稼動軸120の上下及び前後へのチルト過程において、ピストン123の上下動によるシリンダー121内の圧縮力及び膨張力とコイルばね122の弾性力により、クランクピン154の円形の回転運動がサドル140の上下に延びた楕円運動に変換可能である。
サドル140は、稼動軸120の上部をなすシャフト124の上端に螺合されてナットなどにより固定されてもよく、締まりばめ後にボルトにより締め付けられてもよく、溶接により固定されてもよく、別途のブラケットなどの固定部材により固定されてもよく、これらに加えて様々な方法により固定されてもよく、使用者が馬に乗ってからサドルに着座するための形状を呈してもよい。
更にまた、サドル140は、前端に使用者が把持可能なようにハンドル141が設けられていてもよく、使用者が足を掛けて支持されるように下部に延びる足掛け手段(図示せず)が設けられていてもよい。
駆動操作部143は、前記サドル140の前方に連結されてもよく、乗馬動作駆動部150の駆動モーター151などをはじめとする器具の動作をそれぞれ制御・操作してもよい。
換言すると、前記駆動操作部143は、乗馬動作駆動部150の駆動モーター151を作動又は停止してもよく、駆動速度及び動作などを調節してもよい。
乗馬動作駆動部150は前記本体110の内側に配設されていてもよく、稼動軸120が上下及び前後にチルト運動をするように稼動軸120に駆動力を伝達してもよい。
すなわち、図5に示すように、稼動軸120が上下及び前後にチルト運動をするようにシリンダー121にクランク運動を伝達するように構成されてもよい。
乗馬動作駆動部150は、このようなクランク運動を伝達するために、本体110内の下部に配設される駆動モーター151と、駆動モーター151の回転力を減速する減速部152と、減速部152により回転するように配設される減速歯車153と、減速歯車153に偏心されるように配設されるクランクピン154と、クランクピン154に回転自在に係合されるとともに稼動軸120のシリンダー121の下端に固定される回転係合部材155と、を備えていてもよい。
ここで、駆動モーター151は、モーターブラケットなどにより本体110の底面に固定されてもよい。
また、減速部152は、例えば、駆動モーター151の回転軸に固定された第1のプーリー152aと、第1のプーリー152aに第1のベルト152bにより連結される第2のプーリー152cと、第2のプーリー152cに2段に積層されるとともに第2のプーリー152cよりも小さな直径を有する第3のプーリー152dと、第3のプーリー152dを減速歯車153に連結する第2のベルト152eと、を備えていてもよい。
一方、第2のプーリー152c及び減速歯車153は、回転支持のために回転軸(図示せず)を有してもよく、このような回転軸が本体110内に固定される軸固定部材及びここに配設される軸受けなどにより回転自在に固定されてもよい。
一方、図7に示すように、本発明の一実施形態による乗馬式フィットネス器具100は、使用者がサドル140に安全に着座するために、感知部171と、ホルダー173及び係止溝174を備えていてもよい。
感知部171は、使用者を感知したり、使用者により感知されたりするように配設されるが、例えば、支持フレーム160に設けられたハンドル(図示せず)に配設されていてもよく、ひいては、サドル140のハンドル141などに配設されていてもよく、使用者が押すか、或いは、使用者の手を感知し、これによる電気信号を出力するようにし、感知センサー又はスイッチなどにより構成されてもよい。なお、感知部171は、使用者が手で掴む個所に配設されることにより、使用者を感知したとき、ホルダー173が係止溝174への係止によりシャフト124に対するブレーキ作用を行うようにする。
ホルダー173は、感知部171から出力される電気信号を受信して係止片172をシリンダー121に形成される開口を介してシリンダー121の内側に嵌入したり、シリンダー121の外側に戻したりし、シリンダー121の外側面に配設されていてもよく、例えば、電磁石の磁力を用いて鉄製の係止片172を両方向に選択的に移動させる電磁石ホルダーからなるか、他の例として、係止片172を備えるソレノイドアクチュエーターからなるか、更に他の例として、モーターの回転力を直線運動に切り換えて係止片174を移動させるモーター駆動方式のホルダーなどからなる。一方、ホルダー173は、係止片172の出入りのために形成されたシリンダー121の開口を密閉する機能を有してもよい。
係止溝174は、係止片172がシリンダー121の内側に嵌入するときに引っ掛かるようにシャフト124の外周面に形成されるが、係止片172が余裕をもって引っ掛かるように係止片172の大きさよりも大きな規格を有するように形成され、例えば、円形のシャフト124にミリングを用いて一部の区間をDカット状に加工することにより形成されてもよい。
一方、図8は、本発明の乗馬式フィットネス器具100における前記本体110を上部から見下ろした平面図であり、図9は、前記本体110を正面から眺めた正面図である。図8及び図9には、説明しやすさのために、サドル140を中心に示されている。
図8及び図9を参照すると、前記乗馬式フィットネス器具100は、上述したように、本体110と、前記本体110の上部に配備されて使用者が着座するサドル140と、前記サドル140の下部に連結されて、前記サドル140が上下及び前後にチルト動作可能なように前記本体内に配設される稼動軸120と、前記稼動軸120が上下及び前後にチルト運動をするように前記稼動軸120に駆動力を伝達する乗馬動作駆動部150と、前記サドル140の前方に連結されて前記乗馬動作駆動部150の駆動を操作する駆動操作部143と、を備えていてもよい。
上述した構成要素については既に上述したため、これらについての重複する説明は省略する。
一方、本発明の実施形態による乗馬式フィットネス器具100は、前記サドル140に連結されて前記サドル140から下部に向かって延設される一対の側面パッド140a、140bと、前記側面パッド140a、140bの内側からが外部に向かって所定の弾性力を加え、使用者により前記側面パッド140a、140bの外側から内部に向かって所定の圧力が加えられる場合、前記駆動操作部143に向かって制御信号を送信する弾支部400と、を更に備えていてもよい。
すなわち、本発明の実施形態による乗馬式フィットネス器具100は、使用者が前記サドル140に着座した場合、単に遊戯のみを提供するわけではなく、使用者が十分な運動効果を得るように前記弾支部400を備える。
前記弾支部400は、前記サドル140の下部に向かって延設された一対の側面パッド140a、140bを支持するが、所定の弾性力を前記側面パッド140a、140bの外側に向かって加えるように構成されてもよい。この場合、前記弾支部400により前記側面パッド140a、140bに加えられる弾性力は、使用者の身体条件に対応して予め設定でき、調節可能である。
図8及び図9は、前記側面パッド140a、140bが前記本体110の外部に向かって拡開された状態を示す図である。
上記のような状態で、使用者が前記サドル140に着座する場合、前記使用者の太もも部位が前記側面パッド140a、140bに対応して位置する。
このとき、前記使用者が太ももなどを用いて前記側面パッド140a、140bを加圧すると、図12及び図13に示すように、前記側面パッド140a、140bが前記本体110に向かって回転して前記本体110に密着した状態又は前記本体110に近付いた状態を維持する。
この場合、前記弾支部400は、前記側面パッド140a、140bが回転して縮閉された場合、使用者により所定の圧力が加えられたことを認識し、これを制御信号として前記駆動操作部143に送る。
前記駆動操作部143は、前記弾支部400から送られてくる前記制御信号を受信する場合、使用者が前記側面パッド140a、140bに力を加えたと判断し、前記乗馬動作駆動部150の駆動を制御する。
すなわち、本発明の実施形態においては、使用者が前記サドル140に着座して前記側面パッド140a、140bに太ももなどを用いて圧力を加えて運動をする場合、前記駆動操作部143がこれを認識し、乗馬動作駆動部150の駆動を制御することにより、使用者の運動効果を極大化させることができ、更に現実感あふれる乗馬運動を使用者に提供することができる。
図10は、上述した弾支部400の構成を示す図である。図10の(A)は、前記弾支部400の正面図であり、図10の(B)は、前記弾支部400の平面図である。
図10を参照すると、前記弾支部400は、使用者により前記側面パッド140a、140bに加えられる運動量を測定するセンサー300(図9参照)が回転した角度を測定する角度センサー300(図9参照)と、前記一対の側面パッド140a、140bとそれぞれ連結される一対のダンピング連結部420と、前記一対のダンピング連結部420とそれぞれ連結されて弾性力を加える一対の弾性部440A、440Bと、前記一対の弾性部440A、440Bの間に配置されて前記弾性部440A、440Bによる弾性力を調節する弾性力調節部434と、を備えていてもよい。
ここで、前記センサー300は、使用者が太ももなどを用いて前記側面パッド140a、140bを加圧する場合に前記側面パッド140A、140Bに加えられる運動量を測定する。例えば、前記センサー300は、前記側面パッド140A、140Bが回転した角度を測定する角度センサ、前記側面パッド140A、140Bに加えられる圧力を測定する圧力センサ、または使用者の太ももの動きの回数を測定するための接触/非接触式スイッチのうちから選ばれた少なくともいずれか一つにより構成されてもよい。以下、前記センサー300が角度センサ300により構成された場合を想定して説明する。
前記角度センサー300は、前記側面パッド140a、140bの一方の側にそれぞれ配備された第1の角度センサー310A及び第2の角度センサー310Bにより構成されることが好ましい。前記角度センサー300は、前記側面パッド140a、140bが回転した角度を測定する。このような回転角度は、前記弾支部400を介して前記駆動操作部143に伝達される。
一方、前記ダンピング連結部420は、衝撃又は振動を吸収しながら伸縮するような構造を有していてもよい。例えば、前記ダンピング連結部420は、いわゆる「ショックアブソーバー(shock absorber)」により構成できる。
この場合、前記ダンピング連結部420の端部420A、420Bは前記側面パッド140a、140bに連結され、胴体部410A、410Bは上述した弾性部440A、440Bにそれぞれ連結される。このとき、前記ダンピング連結部420は、前記弾性部440A、440Bに所定の角度で回動可能なように連結される。
このため、使用者が太ももなどを用いて前記側面パッド140a、140bを加圧する場合、前記ダンピング連結部420が伸縮しながら前記弾性部440A、440Bを加圧して前記側面パッド140a、140bが回動しながら前記本体110に向かって回転することになる。
一方、前記弾性部440A、440Bは、使用者が前記側面パッド140a、140bを加圧する場合、前記側面パッド140a、140bを支持する弾性力又は反発力を与える使用者が運動を行うようにする。
前記弾性部440A、440は、例えば、ばねなどにより構成されてもよく、図11に示すように、エアポケット(air pocket)1440A、1440Bなどにより構成されてもよい。さらに、図面には図示されていないが、前記弾性部は、「ショックアブソーバー(shock absorber)」により構成されてもよい。ここで、前記弾性部440A、440Bは、その弾性力を調節するように構成された部材に適切に変形可能である。
一方、図10に戻ると、前記一対の弾性部440A、440Bの間には弾性力調節部434が配備される。
本発明に係る前記乗馬式フィットネス器具100を使用する場合、使用者の年齢、性別などに応じて筋力をはじめとする各種の身体条件に違いが生じる。このため、前記使用者の身体条件に応じて前記側面パッド140a、140bに加えられる弾性力を調節することが必要であり、本発明の実施形態において、前記弾支部400、400’は、前記側面パッド140a、140bに加えられる弾性力を調節するように構成される。
例えば、前記弾性力調節部434が前記弾性部440A、440Bの弾性力を調節するように構成される。
前記弾性力調節部434は、歯車箱432及び前記歯車箱432に配備されて前記弾性部440A、440Bの弾性力を調節する歯車部430と、前記歯車部430を回転させるモーター450と、を備えていてもよい。
前記歯車部430は、前記弾性部440A、440Bに連結されて、前記弾性部440A、440Bにより前記側面パッド140a、140bに伝達される弾性力を調節するように構成される。
例えば、使用者が前記モーター450を駆動させて前記歯車部430を操作又は回転させる場合、前記弾性部440A、440Bを構成するばねの圧縮長さなどが異なってくる。前記ばねの圧縮長さが異なってくる場合、前記ばねにより加えられる弾性力に違いが生じて前記側面パッド140a、140bに加えられる弾性力を調節することができる。
一方、前記駆動操作部143は、前記乗馬式フィットネス器具100の運動終了信号が伝達された場合に前記側面パッド140a、140bが前記本体110の側面に密着するようにし、逆に運動開始信号が伝達された場合には前記側面パッド140a、140bが前記本体110の側面から所定の角度で拡開されるようにする。
例えば、使用者が運動終了ボタンなどを選択して運動終了信号が前記駆動操作部143に伝達された場合、前記駆動操作部143は、前記弾性力調節部434のモーター450を駆動させて前記弾支部400による弾性力を調節することができる。
具体的には、前記駆動操作部143は、前記モーター450を駆動させて前記歯車部430を回転させる。この時、前記弾性部440A、440Bを構成するばねの圧縮長さが短くなるように、前記歯車部430を回転させて前記側面パッド140a、140bが前記本体110の側面に密着するようにする。
これに対し、使用者が前記乗馬式フィットネス器具100に着座して運動開始ボタンなどを選択し、運動開始信号が前記駆動操作部143に伝達された場合、前記駆動操作部143は、前記弾性力調節部434のモーター450を駆動させて前記側面パッド140a、140bが前記本体110の側面から拡開されるようにする。
この時、前記駆動操作部143は、前記モーター450を駆動させて前記歯車部430を回転させる。前記駆動操作部143は、前記側面パッド140a、140bが前記本体110の側面から最大限に拡開できるようにする。
この場合、使用者が自分の身体条件に応じて前記弾支部400による弾性力の強さを予め選択することができる。例えば、使用者は、ディスプレイ部165などを用いて前記弾支部400による弾性力の強さを「上」、「中」、「低」の中から選択することができる。このように選択された弾性力の強さ信号は、前記駆動操作部143に伝達される。
前記駆動操作部143は、選択された前記弾性力の強さ信号に基づいて弾性力を前記側面パッド140a、140bに提供できるように、前記側面パッド140a、140bが前記本体110の側面から拡開される角度を調節することができる。
すなわち、前記駆動操作部143は、前記モーター450により前記歯車部430を回転させることにより、使用者の身体条件に応じて選択された弾性力を提供できるように、前記弾性部440A、440Bを構成するばねの圧縮長さを調節することができる。この場合、前記側面パッド140a、140bが拡開される角度も共に調節される。
したがって、前記乗馬式フィットネス器具100を使用しない場合、または運動が終了した場合は、前記側面パッド140a、140bが前記本体110の側面に密着していて拡開されない。また、使用者が前記乗馬式フィットネス器具100を使用するために運動開始信号を伝達した場合、前記側面パッド140a、140bが前記本体110の側面から拡開されて運動準備状態をとることになる。
この際、前記側面パッド140a、140bは、使用者の身体条件に応じて所定の弾性力を提供できるようにその拡開角度が調節できる。
以下、添付図面に基づいて、使用者がサドル140に着座して前記側面パッド140a、140bを加圧して運動する過程について説明する。
図8及び図9を参照すると、 使用者が前記乗馬式フィットネス器具100を使用しない場合、または運動が終了した場合は、前記側面パッド140a、140bが前記本体110の側面に密着していて拡開されない。このような状態で使用者が前記乗馬式フィットネス器具100を使用するために運動開始ボタンなどを押すと、前記側面パッド140a、140bが前記本体110の側面から拡開されて運動準備状態をとることになる。
この場合、使用者が前記側面パッド140a、140bを加圧しない場合、前記側面パッド140a、140bは、前記本体110から外部に向かって回転して拡開された状態を維持する。このとき、前記側面パッド140a、140bの上部には、上述したように、前記側面パッド140a、140bが回転した角度を測定する角度センサー300が配設されていてもよい。
この場合、図10又は図11に示すように、前記弾支部400、400’の弾性部440A、440B、1440A、1440Bもまた未圧縮の状態を維持する。
このような状態で、使用者がサドル140に着座して太ももなどを用いて前記側面パッド140a、140bを加圧すると、図12及び図13に示すように、前記側面パッド140a、140bが前記本体110に向かって回動して拡開された状態が縮閉された状態に変わる。
このとき、図14又は図15に示すように、前記弾支部400、400’の前記弾性部440A、440B、1440A、1440Bが圧縮されて使用者が前記弾性部440A、440B、1440A、1440Bの弾性力又は反発力を克服して十分に運動していることが分かる。
この場合、前記弾支部400、400’は、上述した角度センサー300により前記側面パッド140a、140bが回転した角度を測定して、前記駆動操作部143に制御信号を送る。
前記駆動操作部143は、前記弾支部400において前記制御信号を受信する場合、前記乗馬動作駆動部150の駆動を制御してもよい。
例えば、前記駆動操作部143は、前記弾支部400において前記制御信号を受信する場合、前記乗馬動作駆動部150の駆動を開始するように制御してもよい。
すなわち、使用者が前記サドル140に着座した場合、も、前記駆動操作部143は、前記乗馬動作駆動部150の駆動を開始せず、使用者が運動開始ボタンなどを押すか又は太ももなどを用いて前記側面パッド140a、140bを加圧して運動を開始した場合、前記駆動操作部143は前記乗馬動作駆動部150の駆動を開始してもよい。
この場合、使用者は、太ももなどを用いて前記側面パッド140a、140bを加圧するとき、前記乗馬動作駆動部150が駆動されて乗馬式フィットネス器具100が動くので、運動効果が得られるとともに、乗馬をまるで実際にするかのような楽しみが感じられる。
一方、前記駆動操作部143は、前記弾支部400において前記制御信号を受信する場合、前記乗馬動作駆動部150から前記稼動軸120に伝達される駆動力を調節してもよい。
例えば、前記駆動操作部143は、前記弾支部400において前記制御信号を受信する間にのみ前記稼動軸120に駆動力が伝達されるようにしてもよい。
すなわち、使用者が前記側面パッド140a、140bを加圧する場合は運動をしている状態であるため前記駆動力が伝達されるようにし、これに対し、使用者が前記側面パッド140a、140bを加圧しない場合は運動をしていない状態であるため前記駆動力が伝達されないようにしてもよい。
また、前記駆動操作部143は、使用者の運動強度に比例して前記駆動力を制御してもよい。使用者が前記側面パッド140a、140bを加圧する場合、運動強度に応じて前記側面パッド140a、140bが回転する角度、前記側面パッド140a、140bに作用する圧力又は接触/非接触式スイッチがスイッチングする回数が異なってくる。このため、前記駆動操作部143は、前記側面パッド140a、140bが回転した角度、 前記側面パッド140a、140bに作用する圧力又は接触/非接触式スイッチがスイッチングする回数に基づいて前記稼動軸120に伝達される駆動力を調節してもよい。
すなわち、前記側面パッド140a、140bの回転量が相対的に多い場合、前記側面パッド140a、140bに作用する圧力が相対的に多い場合又は接触/非接触式スイッチによるスイッチング回数が多い場合は、使用者の運動強度が相対的に強くなった場合であるため、前記稼動軸120に相対的に強い駆動力を与えることができる。
これに対し、前記側面パッド140a、140bの回転量が相対的に少ない場合、前記側面パッド140a、140bに作用する圧力が相対的に少ない場合又は接触/非接触式スイッチによるスイッチング回数が少ない場合は、使用者の運動強度が相対的に弱くなった場合であるため、前記稼動軸120に相対的に弱い駆動力を与えることができる。
このため、使用者が前記側面パッド140a、140bに相対的に多い力を加えて運動強度が強くなった場合、前記乗馬式フィットネス器具100もまた相対的に速く動いたり、或いは、更に大きく動いたりして、使用者は、運動効果が得られるとともに、楽しみが感じられる。
一方、上述した駆動操作部143による乗馬動作駆動部150の制御は、使用者が選択した運動モードに基づいて行われてもよい。
すなわち、使用者が前記乗馬式フィットネス器具100を使用する場合、運動のために使用する場合もあれば、遊戯のために使用する場合もある。このため、使用者が運動モードを選択するようにして、使用者が選択した運動モードに基づいて駆動操作部143による乗馬動作駆動部150の制御を異ならせてもよい。
例えば、上述した表示部165を用いて使用者が運動モードを選択してもよい。この場合、使用者は、第1のモード又は第2のモードを選択してもよい。ここで、前記第1のモードは、例えば、自動モードであってもよく、前記第2のモードは、例えば、手動モードであってもよい。
使用者が前記第1のモード又は自動モードを選択する場合、前記駆動操作部143は、所定のプログラムに従い前記乗馬動作駆動部150の駆動を制御してもよい。
すなわち、使用者が第1のモードを選択した場合は、使用者が側面パッド140a、140bを加圧したか否かを判断せず、所定のプログラムに従い前記乗馬動作駆動部150を制御する。
一方、使用者が第2のモード又は手動モードを選択する場合、前記駆動操作部143は、前記制御信号の受信有無に基づいて前記乗馬動作駆動部150の駆動を制御してもよい。
前記駆動操作部143が前記制御信号を受信して前記乗馬動作駆動部150を制御する場合、ついては既に上述したため、これについての重複する説明は省略する。
一方、図16及び図17は、本発明の他の実施形態による乗馬式フィットネス器具100を示す図である。
図16を参照すると、前記乗馬式フィットネス器具100は、上述した構成要素に加えて、前記使用者の足が載置され、少なくとも一部が回動可能な足支持部500を更に備えていてもよい。
すなわち、上述した実施形態は、使用者の太もも運動のための側面パッド140a、140bを有する乗馬式フィットネス器具100に相当し、本発明の実施形態による乗馬式フィットネス器具は、使用者のふくらはぎ運動のための足支持部500を更に備えていてもよい。
前記足支持部500は、前記足が載置される第1の支持部514と、前記第1の支持部514の前端部に回動自在に連結される第2の支持部510と、前記第2の支持部510が回転した角度を測定する角度センサー512と、を備えていてもよい。
前記第1の支持部514は、第1の支持棒610及び第2の支持棒612により前記本体110に連結される。前記第1の支持部514は、使用者のかかと領域を支持する。この場合、使用者のかかと領域に多くの荷重が加えられる虞があるため、前記第1の支持部514は、前記第1の支持棒610及び第2の支持棒612により強固に支持される。
一方、前記第2の支持部510は、前記第1の支持部514に回動自在に連結される。前記第2の支持部510は、前記第1の支持部514の前端部に回動自在に連結される。
このため、使用者の足が前記足支持部500に載置される場合、使用者のかかと領域は前記第1の支持部514に載置され、使用者の足指領域は前記第2の支持部510に載置される。
このような状態で、使用者が足指などを用いて前記第2の支持部510を押すと、図17に示すように、前記第2の支持部510は、所定の角度だけ回動する。
このとき、使用者により前記第2の支持部510に加えられる運動量は、センサ512により測定される。ここで、前記センサー512は、使用者が前記第2の支持部510を加圧する場合に前記第2の支持部510に加えられる運動量を測定する。例えば、前記センサー512は、前記第2の支持部510が回転した角度を測定する角度センサ、前記第2の支持部510に加えられる圧力を測定する圧力センサ、又は使用者の足の動きの回数を測定するための接触/非接触式スイッチのうちから選ばれたいずれか一つにより構成されてもよい。以下、前記センサー512が角度センサ512により構成された場合を想定して説明する。
前記角度センサー512は、前記第2の支持部510が回転した角度を制御信号の形で前記駆動操作部143に送る。
前記駆動操作部143は、前記足支持部500の回動有無に基づいて、前記乗馬動作駆動部150の駆動を制御する。
すなわち、前記駆動操作部143は、前記角度センサー512から制御信号が送られてきた場合、前記乗馬動作駆動部150の駆動を制御してもよい。
この場合、前記駆動操作部143は、前記制御信号を受信する場合、前記乗馬動作駆動部150の駆動を開始してもよく、前記制御信号を受信する場合、前記乗馬動作駆動部150から前記稼動軸120に伝達される駆動力を調節してもよい。
また、前記駆動操作部143は、前記制御信号を受信する間に前記駆動力が伝達されるようにしてもよく、使用者の運動強度に比例して前記駆動力を制御してもよい。
このような駆動操作部143の制御動作については、上述した実施形態の説明と同様であるため、これについての重複する説明は省略する。
一方、上述した図8から図15の場合、前記側面パッド140a、140bを弾支する弾支部400から送られてくる制御信号により駆動操作部143の制御動作が異なってき、図16及び図17の場合、前記足支持部500から送られてくる制御信号により駆動操作部143の制御動作が異なってくる。
このため、前記側面パッド140a、140b及び前記足支持部500を両方とも備える場合、前記駆動操作部143は、前記弾支部400から送られてくる制御信号の受信及び前記足支持部500から送られてくる制御信号のうちの少なくともいずれか一方が受信された場合、前記乗馬動作駆動部150の駆動を制御してもよい。
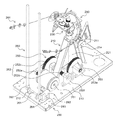
図18から図21は、本発明の他の実施形態による乗馬式フィットネス器具200の一部を示す斜視図、側面図及び平面図である。
図18から図21に示すように、本発明の他の実施形態による乗馬式フィットネス器具200は、本発明の一実施形態による乗馬式フィットネス器具100と同様に、本体210と、稼動軸220と、サドル(図示せず)と、拍動動作駆動部230と、画像操作部261と、足掛け高さ調節部280と、拍車加速部290と、を備えていてもよく、主として本発明の一実施形態による乗馬式フィットネス器具100との相違点について説明する。
本体210は、地面に設置されるベースプレート213の上に稼動軸を支持するための上部フレーム214が垂直に設けられ、ベースプレート213の前端及び後端にベースフレーム213aが幅方向に配設される。ここで、上部フレーム214の上端には、稼動軸220が上下及び前後にチルト可能なように支持されるためのガイド部材211が配設される。なお、ガイド部材211は、例えば、稼動軸220の上下摺動を支持するための軸受け部材と、このような軸受け部材をチルト可能にするチルト構造やフレキシブル材質を有するチルト許容部材などを備えていてもよい。なお、上部フレーム214には、後述する乗馬動作駆動部250及び回転動作駆動部280などに外部から印加される電力を変換して供給するためのインバーダー215が配設されていてもよい。
稼動軸220は、本発明の一実施形態による乗馬式フィットネス器具100の稼動軸120と同様であり、シリンダー221が乗馬動作駆動部250に連結され、シャフト224がガイド部材211により上下及び前後にチルト可能なように配設され、上端に図示しないサドルが固定される。また、稼動軸220には本発明の一実施形態による乗馬式フィットネス器具100において説明したホルダー173及び係止溝174を備える伸縮制限部270が配設されていてもよい。このため、伸縮制限部270によりシャフト224の動きを制限することにより、稼動軸220に対する選択的な伸縮の許容と伸縮の制限により使用者が安全にサドルに着座できるようにする。
乗馬動作駆動部250は、 本発明の一実施形態による乗馬式フィットネス器具100の乗馬動作駆動部150と同様に、本体210のベースプレート213の上に配設される駆動モーター251と、駆動モーター251の回転力を減速させる減速部252と、減速部252により回転するように配設される減速歯車253と、減速歯車253に偏心されるように配設されるクランクピン(図示せず)と、クランクピン(図示せず)に回転自在に係合されるとともにシリンダー221の下端に固定される回転係合部材(図示せず)と、を備えていてもよい。
また、減速部252は、例えば、駆動モーター251の回転軸に固定された第1のプーリー252aと、第1のプーリー252aに第1のベルト(図示せず)により連結される第2のプーリー252cと、第2のプーリー252cに軸により連結されるとともに第2のプーリー252cよりも小さな直径を有する第3のプーリー252dと、第3のプーリー252dを減速歯車253に連結する第2のベルト(図示せず)と、を備えていてもよい。ここで、第2のプーリー252c及び第3のプーリー252dは、軸受けが介在されたプーリー固定部材252fによりベースプレート213の上に回転可能なように配設されていてもよい。
本体210は、ベースプレート213の前端の両側に多数、例えば、一対の支持フレーム260が垂直にそれぞれ配設されていてもよい。支持フレーム260は、例えば、矩形の角材又は円形バーなどの様々な部材により構成されてもよく、下端が幅方向に配列される回転軸261により互いに連結され、回転軸261が本体210のベースプレート213の上に設けられた軸係合部212により前後に回転可能なように係合される。なお、支持フレーム260には、回転軸261が直接的に固定されてもよく、本実施形態のように下端に固定される軸固定部材262を介して回転軸261が固定されてもよい。
支持フレーム260は、回転軸261を中心に前後に回転するとき、本体210のベースプレート213又は配設面との摩擦により回転するホイール264がいずれか一つ又は全てのの下端、例えば、軸固定部材262に回転自在に係合されてもよく、回転軸263が回転動作駆動部280に連結されることにより回転動作駆動部280の駆動により回転軸261を中心に前後に回転運動をする。
図21に示すように、回転動作駆動部280は、支持フレーム260の回転中心をなす軸、すなわち、回転軸261に連結される歯車組立体281と、歯車組立体281に連結されて支持フレーム260の回転軸261に回転力を伝達する回転モーター282と、を備えていてもよい。ここで、歯車組立体281は、回転モーター282及び回転軸261間の交差方向及び減速率を考慮して様々な歯車の組み合わせ、例えば、ウォームホイール及びウォーム歯車、傘歯車(ベベルギヤ)、又は多数の平歯車などにより構成されてもよく、種々の歯車の組み合わせにより構成されてもよく、本実施形態のように内部に動力の伝達のための歯車が配設された歯車箱(ギヤボックス)により構成されてもよい。なお、回転モーター282は、モーターブラケット283によりベースプレート213の上に配設されていてもよい。
このような本発明による乗馬式フィットネス器具の作用について説明するが、説明のしやすさのために、主として本発明の一実施形態による乗馬式フィットネス器具100について説明する。
使用者が駆動操作部143を操作して駆動モーター151を駆動すると、駆動モーター151の回転力が減速部152により減速されて、減速歯車153及びクランクピン154を介して稼動軸120に伝達され、これにより、稼動軸120が本体110のガイド部材111を中心に上下及び前後にチルト運動をして、サドル140に着座した使用者が乗馬フィットネスを行うようにする。
このような稼動軸120の上下及び前後へのチルト過程において、サドル140及びシャフト124を介してピストン123に印加される使用者の荷重がシリンダー121の内部を圧縮し、更には、コイルばね122を圧縮し、次いで、コイルばね122の弾性復元力及びピストン123の上昇によるシリンダー121の内部膨張力により、図6に示すように、クランクピン154の円形の回転運動をサドル140の上下に延びた楕円運動に変換する。
図7に示すように、感知部171が使用者により又は使用者の身体の一部を感知したとき、電気信号をホルダー173に送り、ホルダー173は、感知部171の電気信号に基づいて係止片172がシリンダー121の内側に嵌入して係止溝174に引っ掛かるようにすることにより、係止片172によりシャフト124の動きを極力抑えて使用者が安全にサドル140に着座できるようにする。このような動作は、使用者がサドル140から降りるときにも同様に適用可能である。なお、ホルダー173は、使用者が感知部171により感知されない場合、係止片172が係止溝174から抜脱されるようにして上下動可能にし、これにより、稼動軸120の状態を乗馬動作が行える状態にする。
上述したように、本発明によれば、乗馬フィットネスモーションに対する信頼性に優れており、自重による不規則的な楕円軌道運動をするようにして乗馬フィットネスの効率を高めることができ、有事の際には頭を俯いて駆動操作部143を操作しやすくすることにより安全性を高めることができる。
以上、本発明の実施形態について詳細に説明したが、本発明の権利範囲はこれに何等限定されるものではなく、特許請求の範囲に記載の本発明の技術的思想を逸脱しない範囲内において様々な修正及び変形が加えられるということは当技術分野における通常の知識を有する者にとって自明である。