JP6445742B1 - 高密度電極マッピングカテーテル - Google Patents
高密度電極マッピングカテーテル Download PDFInfo
- Publication number
- JP6445742B1 JP6445742B1 JP2018520395A JP2018520395A JP6445742B1 JP 6445742 B1 JP6445742 B1 JP 6445742B1 JP 2018520395 A JP2018520395 A JP 2018520395A JP 2018520395 A JP2018520395 A JP 2018520395A JP 6445742 B1 JP6445742 B1 JP 6445742B1
- Authority
- JP
- Japan
- Prior art keywords
- conductive
- flexible
- microelectrodes
- arm
- trace
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000013507 mapping Methods 0.000 title description 114
- 238000000034 method Methods 0.000 claims description 131
- 239000003989 dielectric material Substances 0.000 claims description 117
- 239000000463 material Substances 0.000 claims description 88
- 238000000576 coating method Methods 0.000 claims description 48
- 239000011248 coating agent Substances 0.000 claims description 46
- 239000004020 conductor Substances 0.000 claims description 42
- 239000000758 substrate Substances 0.000 claims description 41
- 230000000873 masking effect Effects 0.000 claims description 29
- 229910000679 solder Inorganic materials 0.000 claims description 28
- 229920000642 polymer Polymers 0.000 claims description 26
- 238000007747 plating Methods 0.000 claims description 11
- 238000000151 deposition Methods 0.000 claims description 10
- 230000004044 response Effects 0.000 claims description 5
- 238000005530 etching Methods 0.000 claims description 4
- 239000010410 layer Substances 0.000 description 107
- 210000001519 tissue Anatomy 0.000 description 67
- 230000007704 transition Effects 0.000 description 45
- 238000012360 testing method Methods 0.000 description 39
- 238000012545 processing Methods 0.000 description 29
- 238000002679 ablation Methods 0.000 description 28
- 239000008280 blood Substances 0.000 description 24
- 210000004369 blood Anatomy 0.000 description 24
- 230000000747 cardiac effect Effects 0.000 description 22
- 230000008569 process Effects 0.000 description 20
- 230000004913 activation Effects 0.000 description 17
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 17
- 229910001000 nickel titanium Inorganic materials 0.000 description 17
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 12
- 239000010949 copper Substances 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 210000005003 heart tissue Anatomy 0.000 description 10
- 229910052751 metal Inorganic materials 0.000 description 10
- 239000002184 metal Substances 0.000 description 10
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 8
- 229910052802 copper Inorganic materials 0.000 description 8
- 239000003822 epoxy resin Substances 0.000 description 8
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 8
- 229920000647 polyepoxide Polymers 0.000 description 8
- 230000000694 effects Effects 0.000 description 7
- 102000010834 Extracellular Matrix Proteins Human genes 0.000 description 5
- 108010037362 Extracellular Matrix Proteins Proteins 0.000 description 5
- 238000005452 bending Methods 0.000 description 5
- 238000004070 electrodeposition Methods 0.000 description 5
- 210000002744 extracellular matrix Anatomy 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 229910052759 nickel Inorganic materials 0.000 description 5
- 229910052697 platinum Inorganic materials 0.000 description 5
- 229920000052 poly(p-xylylene) Polymers 0.000 description 5
- 229920002614 Polyether block amide Polymers 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 238000013461 design Methods 0.000 description 4
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 4
- 229910052737 gold Inorganic materials 0.000 description 4
- 239000010931 gold Substances 0.000 description 4
- -1 platinum group metals Chemical class 0.000 description 4
- HWLDNSXPUQTBOD-UHFFFAOYSA-N platinum-iridium alloy Chemical compound [Ir].[Pt] HWLDNSXPUQTBOD-UHFFFAOYSA-N 0.000 description 4
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 3
- 239000004642 Polyimide Substances 0.000 description 3
- 229910052782 aluminium Inorganic materials 0.000 description 3
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 229920001721 polyimide Polymers 0.000 description 3
- 239000002356 single layer Substances 0.000 description 3
- 125000006850 spacer group Chemical group 0.000 description 3
- JYEUMXHLPRZUAT-UHFFFAOYSA-N 1,2,3-triazine Chemical compound C1=CN=NN=C1 JYEUMXHLPRZUAT-UHFFFAOYSA-N 0.000 description 2
- XQUPVDVFXZDTLT-UHFFFAOYSA-N 1-[4-[[4-(2,5-dioxopyrrol-1-yl)phenyl]methyl]phenyl]pyrrole-2,5-dione Chemical compound O=C1C=CC(=O)N1C(C=C1)=CC=C1CC1=CC=C(N2C(C=CC2=O)=O)C=C1 XQUPVDVFXZDTLT-UHFFFAOYSA-N 0.000 description 2
- 229920000106 Liquid crystal polymer Polymers 0.000 description 2
- 239000004977 Liquid-crystal polymers (LCPs) Substances 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 230000001746 atrial effect Effects 0.000 description 2
- 230000004323 axial length Effects 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 238000012512 characterization method Methods 0.000 description 2
- 230000007123 defense Effects 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 238000000608 laser ablation Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 210000004165 myocardium Anatomy 0.000 description 2
- 229920003192 poly(bis maleimide) Polymers 0.000 description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 2
- 239000004810 polytetrafluoroethylene Substances 0.000 description 2
- 238000012552 review Methods 0.000 description 2
- 230000001225 therapeutic effect Effects 0.000 description 2
- DSUFPYCILZXJFF-UHFFFAOYSA-N 4-[[4-[[4-(pentoxycarbonylamino)cyclohexyl]methyl]cyclohexyl]carbamoyloxy]butyl n-[4-[[4-(butoxycarbonylamino)cyclohexyl]methyl]cyclohexyl]carbamate Chemical compound C1CC(NC(=O)OCCCCC)CCC1CC1CCC(NC(=O)OCCCCOC(=O)NC2CCC(CC3CCC(CC3)NC(=O)OCCCC)CC2)CC1 DSUFPYCILZXJFF-UHFFFAOYSA-N 0.000 description 1
- AHQZRFBZJSCKAV-UHFFFAOYSA-N CC1=CCC=C1 Chemical compound CC1=CCC=C1 AHQZRFBZJSCKAV-UHFFFAOYSA-N 0.000 description 1
- 239000004593 Epoxy Substances 0.000 description 1
- RYECOJGRJDOGPP-UHFFFAOYSA-N Ethylurea Chemical compound CCNC(N)=O RYECOJGRJDOGPP-UHFFFAOYSA-N 0.000 description 1
- 229920001410 Microfiber Polymers 0.000 description 1
- 238000005481 NMR spectroscopy Methods 0.000 description 1
- 229910000566 Platinum-iridium alloy Inorganic materials 0.000 description 1
- 229910001260 Pt alloy Inorganic materials 0.000 description 1
- 101150049278 US20 gene Proteins 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 206010003119 arrhythmia Diseases 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000005234 chemical deposition Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000002591 computed tomography Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 239000007933 dermal patch Substances 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000005518 electrochemistry Effects 0.000 description 1
- 238000009713 electroplating Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000002594 fluoroscopy Methods 0.000 description 1
- 239000003365 glass fiber Substances 0.000 description 1
- LNEPOXFFQSENCJ-UHFFFAOYSA-N haloperidol Chemical compound C1CC(O)(C=2C=CC(Cl)=CC=2)CCN1CCCC(=O)C1=CC=C(F)C=C1 LNEPOXFFQSENCJ-UHFFFAOYSA-N 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 229910052741 iridium Inorganic materials 0.000 description 1
- GKOZUEZYRPOHIO-UHFFFAOYSA-N iridium atom Chemical group [Ir] GKOZUEZYRPOHIO-UHFFFAOYSA-N 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 235000013372 meat Nutrition 0.000 description 1
- 238000001465 metallisation Methods 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 239000003658 microfiber Substances 0.000 description 1
- 230000002107 myocardial effect Effects 0.000 description 1
- 210000003516 pericardium Anatomy 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 229920002635 polyurethane Polymers 0.000 description 1
- 230000001012 protector Effects 0.000 description 1
- 238000007674 radiofrequency ablation Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000002459 sustained effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000008685 targeting Effects 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- 210000005166 vasculature Anatomy 0.000 description 1
- 230000002861 ventricular Effects 0.000 description 1
Images

























































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/25—Bioelectric electrodes therefor
- A61B5/279—Bioelectric electrodes therefor specially adapted for particular uses
- A61B5/28—Bioelectric electrodes therefor specially adapted for particular uses for electrocardiography [ECG]
- A61B5/283—Invasive
- A61B5/287—Holders for multiple electrodes, e.g. electrode catheters for electrophysiological study [EPS]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/25—Bioelectric electrodes therefor
- A61B5/279—Bioelectric electrodes therefor specially adapted for particular uses
- A61B5/28—Bioelectric electrodes therefor specially adapted for particular uses for electrocardiography [ECG]
- A61B5/283—Invasive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6852—Catheters
- A61B5/6858—Catheters with a distal basket, e.g. expandable basket
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/362—Heart stimulators
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K3/00—Apparatus or processes for manufacturing printed circuits
- H05K3/02—Apparatus or processes for manufacturing printed circuits in which the conductive material is applied to the surface of the insulating support and is thereafter removed from such areas of the surface which are not intended for current conducting or shielding
- H05K3/06—Apparatus or processes for manufacturing printed circuits in which the conductive material is applied to the surface of the insulating support and is thereafter removed from such areas of the surface which are not intended for current conducting or shielding the conductive material being removed chemically or electrolytically, e.g. by photo-etch process
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K3/00—Apparatus or processes for manufacturing printed circuits
- H05K3/10—Apparatus or processes for manufacturing printed circuits in which conductive material is applied to the insulating support in such a manner as to form the desired conductive pattern
- H05K3/14—Apparatus or processes for manufacturing printed circuits in which conductive material is applied to the insulating support in such a manner as to form the desired conductive pattern using spraying techniques to apply the conductive material, e.g. vapour evaporation
- H05K3/143—Masks therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00526—Methods of manufacturing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00214—Expandable means emitting energy, e.g. by elements carried thereon
- A61B2018/00267—Expandable means emitting energy, e.g. by elements carried thereon having a basket shaped structure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00345—Vascular system
- A61B2018/00351—Heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00345—Vascular system
- A61B2018/00351—Heart
- A61B2018/00357—Endocardium
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00839—Bioelectrical parameters, e.g. ECG, EEG
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/028—Microscale sensors, e.g. electromechanical sensors [MEMS]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/12—Manufacturing methods specially adapted for producing sensors for in-vivo measurements
- A61B2562/125—Manufacturing methods specially adapted for producing sensors for in-vivo measurements characterised by the manufacture of electrodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/22—Arrangements of medical sensors with cables or leads; Connectors or couplings specifically adapted for medical sensors
- A61B2562/221—Arrangements of sensors with cables or leads, e.g. cable harnesses
- A61B2562/222—Electrical cables or leads therefor, e.g. coaxial cables or ribbon cables
Abstract
【選択図】図1A
Description
本出願は、2015年10月21日に出願された「HIGH DENSITY ELECTRODE MAPPING CATHETER」と題する米国特許出願第62/244,565号(‘565号出願)に対する優先権を主張する。本出願は、2016年4月18日に出願された「HIGH DENSITY ELECTRODE MAPPING CATHETER」と題する米国特許出願第62/324,067号(‘067号出願)に対する優先権を主張する。‘565号出願および‘067号出願は両方とも、本明細書によって、参照により本明細書に完全に記載されているように組み込まれる。本出願は、本出願と同一日に出願され、参照により本明細書に完全に記載されているように組み込まれる、「HIGH DENSITY ELECTRODE MAPPING CATHETER」と題する米国特許出願第##/###,###号(CD 1100US01/065513 001329)に関連する。
本開示により、下記の各項目に記載された実施形態が、その技術的意義とともに把握される。
[項目1]
集積電極構造であって、
近位端および遠位端を備えており、カテーテルシャフト長手方向軸を規定するカテーテルシャフトと、
前記カテーテルシャフトの前記遠位端に隣接して位置しており、可撓性フレームワークを備える可撓性先端部分と、
前記可撓性フレームワーク上に配置されており、組織に応じて変形するように構成された微小電極の可撓性アレイを形成する複数の微小電極と、
前記可撓性フレームワーク上に配置されており、各々が前記複数の微小電極のうちの対応する一つと電気的に結合されている複数の導電性トレースと、
を備える集積電極構造。
[項目2]
前記複数の微小電極は、複数のグループに分けて配置されており、
前記複数の微小電極グループの各々は、前記カテーテルシャフト長手方向軸に対して平行に整列する、微小電極の長手方向に配列された列を含み、
前記複数の導電性トレースの各々は、前記カテーテルシャフト長手方向軸に平行に整列されている、項目1に記載の集積電極構造。
[項目3]
前記複数の微小電極の各々は、前記可撓性フレーム構造に対してスエージ加工されている中空円筒バンドを備える、項目2に記載の集積電極構造。
[項目4]
前記複数の微小電極の各々は、前記可撓性フレーム上にパターニングされている、項目2に記載の集積電極構造。
[項目5]
前記複数の導電性トレースの各々と前記可撓性フレームワークとの間に誘電体材料が配置されており、
前記誘電体材料は、前記複数の導電性トレースの各々の外側に面する表面をカバーする、項目2に記載の集積電極構造。
[項目6]
前記複数の導電性トレースの各々と、前記誘電体材料との間にシード層が配置されている、項目5に記載の集積電極構造。
[項目7]
前記複数の微小電極の各々と、前記誘電体材料と、前記複数の導電性トレースの各々の遠位端との間にシード層が配置されている、項目6に記載の集積電極構造。
[項目8]
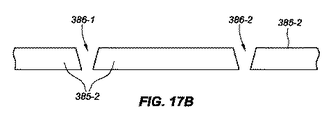
前記複数の導電性トレースの各々の前記外側に面する表面の遠位部分から前記誘電体材料が剥離されている、項目5に記載の集積電極構造。
[項目9]
前記複数の微小電極の各々は、前記導電性トレースの対応する一つと、当該導電性トレースの前記遠位部分において、電気的に結合されている、項目8に記載の集積電極構造。
[項目10]
前記可撓性フレームワークは、誘電体材料でコーティングされたフレームを含む、項目1に記載の集積電極構造。
[項目11]
前記複数の導電性トレースの各々は、前記可撓性先端部分の前記可撓性フレームワークの近位端に配置されている複数の電気コネクタの対応する一つと電気的に結合されている、項目1に記載の集積電極構造。
[項目12]
前記複数の電気コネクタの各々は、互いに電気的に結合されている近位コンタクトパッドおよび遠位コンタクトパッドを含む、項目11に記載の集積電極構造。
[項目13]
前記複数の導電性トレースの各々は、前記複数の電気コネクタの各々の前記遠位コンタクトパッドに電気的に結合されている、項目12に記載の集積電極構造。
[項目14]
前記複数の電気コネクタの各々の前記近位コンタクトパッドに、電気接続部が形成されている、項目12に記載の集積電極構造。
[項目15]
前記可撓性フレームワークは、内方下部構造および外方下部構造を含み、
前記内方下部構造および前記外方下部構造は、単一の材料片から形成されている、項目1に記載の集積電極構造。
[項目16]
前記内方下部構造および前記外方下部構造は、前記内方下部構造および前記外方下部構造の周縁の周りに延伸する無傷性縁部を含む、項目15に記載の集積電極構造。
[項目17]
前記複数の微小電極は、前記可撓性フレームワークの上部および前記可撓性フレームワークの下部に配置されている、項目1に記載の集積電極構造。
[項目18]
前記複数の微小電極は、前記可撓性フレームワークの表面の上方に延伸する、項目1に記載の集積電極構造。
[項目19]
集積電極構造を形成するための方法であって、
前記集積電極構造の可撓性先端部分の可撓性フレームワークを、第1の誘電体材料でコーティングするステップと、
前記マスク部分および非マスクトレースパターン部分を形成するために、マスキング材料を用いて、前記コーティングされている可撓性フレームワーク上でトレースパターンをマスキングするステップと、
前記非マスクトレースパターン部分上にシード層を堆積するステップと、
導電性トレースを形成するために、前記シード層を導電性材料でめっきするステップと、
前記マスク部分から前記マスキング材料を剥離するステップと、
前記導電性トレースを第2の誘電体材料でコーティングするステップと、
前記導電性トレースの遠位部分から前記第2の誘電体材料を剥離するステップと、
微小電極を前記導電性トレースの前記遠位部分に電気的に接続するステップと
を含む、方法。
[項目20]
前記微小電極を前記導電性トレースの前記遠位部分に電気的に接続するステップは、
マスク画定領域を形成するために、前記集積電極構造の前記可撓性フレームワークを、前記導電性トレースの前記遠位部分に対して近位方向および遠位方向においてマスキングすることと、
前記マスク画定領域にわたって第2のシード層を堆積することと、
前記微小電極を形成するために、前記マスク画定領域を導電性材料でめっきすることと
を含む、項目19に記載の方法。
[項目21]
前記可撓性フレームワークのマスク部分を剥離するステップをさらに含む、項目20に記載の方法。
[項目22]
周方向マスク画定領域を形成するために、前記集積電極構造の前記可撓性フレームワークを、前記導電性トレースの前記遠位部分に対して近位および遠位方向において周方向にマスキングするステップをさらに含む、項目20に記載の方法。
[項目23]
中空円筒バンドを前記導電性トレースの前記遠位部分に電気的に接続するステップをさらに含み、前記中空円筒バンドは、前記可撓性先端部分の前記可撓性フレームワークと同軸上にある、項目19に記載の方法。
[項目24]
前記中空円筒バンドを前記導電性トレースの前記遠位部分に電気的に接続するステップは、
前記導電性トレースの前記遠位部分上にはんだを堆積することと、
前記中空円筒バンドを、前記導電性トレースの前記遠位部分および前記可撓性フレームワークと同軸上に整列させることと、
前記中空円筒バンドを前記導電性トレースの前記遠位部分に電気的に結合するために、前記はんだをリフローすることと
を含む、項目23に記載の方法。
[項目25]
集積電極構造を形成するための方法であって、
前記集積電極構造の可撓性先端部分の可撓性フレームワークを、導電性材料でコーティングするステップと、
マスクトレースパターン部分および非マスク部分を形成するために、マスキング材料を用いて、前記コーティングされている可撓性フレームワーク上でトレースパターンをマスキングするステップと、
前記可撓性フレームワーク基板を露出させるために、前記非マスク部分をエッチングするステップと、
導電性トレースを露出させるために、前記マスクトレースパターン部分から前記マスキング材料を剥離するステップと、
前記導電性トレースを誘電体材料でコーティングするステップと、
前記導電性トレースの遠位部分から前記誘電体材料を剥離するステップと、
微小電極を前記導電性トレースの前記遠位部分に電気的に接続するステップと
を含む、方法。
[項目26]
前記集積電極構造にポリマーをオーバーモールドするステップをさらに含む、項目25に記載の方法。
[項目27]
前記微小電極の外面から前記ポリマーを除去するステップをさらに含む、項目26に記載の方法。
[項目28]
集積電極構造であって、
近位端および遠位端を備えており、カテーテルシャフト長手方向軸を規定するカテーテルシャフトと、
前記カテーテルシャフトの前記遠位端に隣接して位置しており、内方下部構造および外方下部構造を含む可撓性フレームワークを備える可撓性先端部分と、
前記内方下部構造および前記外方下部構造の上面、ならびに、前記内方下部構造および前記外方下部構造の底面上に配置されており、組織に応じて変形するように構成された微小電極の可撓性アレイを形成する複数の微小電極と、
前記内方下部構造および前記外方下部構造の前記上面、ならびに、前記内方下部構造および前記外方下部構造の底面上に配置されており、各々が前記複数の微小電極のうちの対応する一つと電気的に結合されている複数の導電性トレースと、
を備える集積電極構造。
[項目30]
前記上面上に配置されている前記微小電極の各々は、前記底面上に配置されているとともに垂直方向において隣接した対応する微小電極を有する、項目28に記載の集積電極構造。
[項目31]
前記内方下部構造および前記外方下部構造は、前記内方下部構造および前記外方下部構造の周縁の周りに延伸する無傷性縁部を含む、項目28に記載の集積電極構造。
[項目32]
前記内方下部構造および前記外方下部構造に接続されている取り付け部分をさらに備え、前記取り付け部分は、前記複数の導電性トレースを介して前記複数の微小電極と電気的に結合されている複数のコンタクトパッドを含む、項目28に記載の集積電極構造。
[項目33]
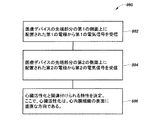
第1の電極と組織との間の接触度を決定するための方法であって、
医療デバイスの先端部分の第1の側面上に配置されている前記第1の電極から第1の電気信号を受信するステップと、
前記医療デバイスの前記先端部分の第2の側面上に配置されている第2の電極から第2の電気信号を受信するステップであり、前記第1の電極および前記第2の電極は、互いに対して垂直方向に隣接して配置されている、第2の電気信号を受信するステップと、
前記第1の電気信号と前記第2の電気信号との間の比較に基づいて、前記第1の電極と前記組織との間の前記接触度を決定するステップと
を含む、方法。
[項目34]
前記第1の電気信号と前記第2の電気信号との間の前記比較は、前記第1の電気信号と関連付けられる第1の電圧と、前記第2の電気信号と関連付けられる第2の電圧との比較を含む、項目33に記載の方法。
[項目35]
前記第1の電気信号と関連付けられる前記第1の電圧と、前記第2の電気信号と関連付けられる前記第2の電圧とが同じであるとき、前記第1の電極が前記組織と接触していないと判定するステップをさらに含む、項目34に記載の方法。
[項目36]
前記第1の電気信号と関連付けられる前記第1の電圧が、前記第2の電気信号と関連付けられる前記第2の電圧よりも大きいとき、前記第1の電極が前記組織と接触していると判定するステップをさらに含む、項目34に記載の方法。
[項目37]
前記第1の電極は、前記組織に対して配置されており、前記第2の電極は血液プール内に配置されている、項目36に記載の方法。
[項目38]
前記第1の電気信号と関連付けられる前記第1の電圧が前記第2の電気信号と関連付けられる前記第2の電圧に対して増大していることに基づいて、前記第1の電極と前記組織との間の接触度が増大していると判定するステップをさらに含む、項目34に記載の方法。
[項目39]
前記第1の電気信号と関連付けられる前記第1の電圧が前記第2の電気信号と関連付けられる前記第2の電圧に対して低減していることに基づいて、前記第1の電極と前記組織との間の接触度が低減していると判定するステップをさらに含む、項目34に記載の方法。
[項目40]
心内膜組織と関連付けられる心臓活性化を判定するための方法であって、
医療デバイスの先端部分の第1の側面上に配置されている第1の電極から第1の電気信号を受信するステップと、
前記医療デバイスの前記先端部分の第2の側面上に配置されている第2の電極から第2の電気信号を受信するステップであり、前記第1の電極および前記第2の電極は、互いに対して垂直方向に隣接して配置されている、第2の電気信号を受信するステップと、
前記心臓活性化と関連付けられる特性を判定するステップであり、前記心臓活性化は、前記心内膜組織の表面に垂直な方向である、判定するステップと
を含む、方法。
[項目41]
前記心臓活性化と関連付けられる前記特性を判定するステップが、前記心臓活性化の方向を判定することを含む、項目40に記載の方法。
[項目42]
前記第2の電気信号に基づいて前記第1の電気信号から雑音をフィルタリング除外するステップをさらに含む、項目40に記載の方法。
Claims (25)
- 集積電極構造であって、
近位端および遠位端を備えており、カテーテルシャフト長手方向軸を規定するカテーテルシャフトと、
前記カテーテルシャフトの前記遠位端に隣接して位置しており、可撓性フレームワークを備える可撓性先端部分と、
前記可撓性フレームワーク上に配置されており、組織に応じて変形するように構成された微小電極の可撓性アレイを形成する複数の微小電極と、
前記可撓性フレームワーク上に配置されており、各々が前記複数の微小電極のうちの対応する一つと電気的に結合されている複数の導電性トレースと、
を備え、
前記複数の微小電極は、複数のグループに分けて配置されており、
前記複数の微小電極グループの各々は、前記カテーテルシャフト長手方向軸に対して平行に整列する、微小電極の長手方向に配列された列を含み、
前記複数の導電性トレースの各々は、前記カテーテルシャフト長手方向軸に平行に整列されており、
前記複数の導電性トレースの各々と前記可撓性フレームワークとの間に誘電体材料が配置されており、
前記誘電体材料は、前記複数の導電性トレースの各々の外側に面する表面をカバーする、集積電極構造。 - 前記複数の微小電極の各々は、前記可撓性フレームワークに対してスエージ加工されている中空円筒バンドを備える、請求項1に記載の集積電極構造。
- 前記複数の微小電極の各々は、前記可撓性フレームワーク上にパターニングされている、請求項1に記載の集積電極構造。
- 前記複数の導電性トレースの各々と、前記誘電体材料との間にシード層が配置されている、請求項1に記載の集積電極構造。
- 前記複数の微小電極の各々と、前記誘電体材料と、前記複数の導電性トレースの各々の遠位部分との間にシード層が配置されている、請求項4に記載の集積電極構造。
- 前記複数の導電性トレースの各々の前記外側に面する表面の遠位部分から前記誘電体材料が剥離されている、請求項1に記載の集積電極構造。
- 前記複数の微小電極の各々は、前記導電性トレースの対応する一つと、当該導電性トレースの前記遠位部分において、電気的に結合されている、請求項6に記載の集積電極構造。
- 前記可撓性フレームワークは、誘電体材料でコーティングされたフレームを含む、請求項1に記載の集積電極構造。
- 前記複数の導電性トレースの各々は、前記可撓性先端部分の前記可撓性フレームワークの近位端に配置されている複数の電気コネクタの対応する一つと電気的に結合されている、請求項1に記載の集積電極構造。
- 前記複数の電気コネクタの各々は、互いに電気的に結合されている近位コンタクトパッドおよび遠位コンタクトパッドを含む、請求項9に記載の集積電極構造。
- 前記複数の導電性トレースの各々は、前記複数の電気コネクタの各々の前記遠位コンタクトパッドに電気的に結合されている、請求項10に記載の集積電極構造。
- 前記複数の電気コネクタの各々の前記近位コンタクトパッドに、電気接続部が形成されている、請求項10に記載の集積電極構造。
- 前記可撓性フレームワークは、内方下部構造および外方下部構造を含み、
前記内方下部構造および前記外方下部構造は、単一の材料片から形成されている、請求項1に記載の集積電極構造。 - 前記内方下部構造および前記外方下部構造は、前記内方下部構造および前記外方下部構造の周縁の周りに延伸する無傷性縁部を含む、請求項13に記載の集積電極構造。
- 前記複数の微小電極は、前記可撓性フレームワークの上部および前記可撓性フレームワークの下部に配置されている、請求項1に記載の集積電極構造。
- 前記複数の微小電極は、前記可撓性フレームワークの表面の上方に延伸する、請求項1に記載の集積電極構造。
- 集積電極構造を形成するための方法であって、
前記集積電極構造の可撓性先端部分の可撓性フレームワークを、第1の誘電体材料でコーティングするステップと、
マスク部分および非マスクトレースパターン部分を形成するために、マスキング材料を用いて、前記コーティングされている可撓性フレームワーク上でトレースパターンをマスキングするステップと、
前記非マスクトレースパターン部分上にシード層を堆積するステップと、
導電性トレースを形成するために、前記シード層を導電性材料でめっきするステップと、
前記マスク部分から前記マスキング材料を剥離するステップと、
前記導電性トレースを第2の誘電体材料でコーティングするステップと、
前記導電性トレースの遠位部分から前記第2の誘電体材料を剥離するステップと、
微小電極を前記導電性トレースの前記遠位部分に電気的に接続するステップと
を含む方法。 - 前記微小電極を前記導電性トレースの前記遠位部分に電気的に接続するステップは、
マスク画定領域を形成するために、前記集積電極構造の前記可撓性フレームワークを、前記導電性トレースの前記遠位部分に対して近位方向および遠位方向においてマスキングすることと、
前記マスク画定領域にわたって第2のシード層を堆積することと、
前記微小電極を形成するために、前記マスク画定領域を導電性材料でめっきすることとを含む、請求項17に記載の方法。 - 前記可撓性フレームワークのマスク部分を剥離するステップをさらに含む、請求項18に記載の方法。
- 周方向マスク画定領域を形成するために、前記集積電極構造の前記可撓性フレームワークを、前記導電性トレースの前記遠位部分に対して近位および遠位方向において周方向にマスキングするステップをさらに含む、請求項18に記載の方法。
- 中空円筒バンドを前記導電性トレースの前記遠位部分に電気的に接続するステップをさらに含み、前記中空円筒バンドは、前記可撓性先端部分の前記可撓性フレームワークと同軸上にある、請求項17に記載の方法。
- 前記中空円筒バンドを前記導電性トレースの前記遠位部分に電気的に接続するステップは、
前記導電性トレースの前記遠位部分上にはんだを堆積することと、
前記中空円筒バンドを、前記導電性トレースの前記遠位部分および前記可撓性フレームワークと同軸上に整列させることと、
前記中空円筒バンドを前記導電性トレースの前記遠位部分に電気的に結合するために、前記はんだをリフローすることと
を含む請求項21に記載の方法。 - 集積電極構造を形成するための方法であって、
前記集積電極構造の可撓性先端部分の可撓性フレームワーク基板を、導電性材料でコーティングするステップと、
マスクトレースパターン部分および非マスク部分を形成するために、マスキング材料を用いて、前記コーティングされている可撓性フレームワーク基板上でトレースパターンをマスキングするステップと、
前記可撓性フレームワーク基板を露出させるために、前記非マスク部分をエッチングするステップと、
導電性トレースを露出させるために、前記マスクトレースパターン部分から前記マスキング材料を剥離するステップと、
前記導電性トレースを誘電体材料でコーティングするステップと、
前記導電性トレースの遠位部分から前記誘電体材料を剥離するステップと、
微小電極を前記導電性トレースの前記遠位部分に電気的に接続するステップと
を含む、方法。 - 前記集積電極構造にポリマーをオーバーモールドするステップをさらに含む、請求項23に記載の方法。
- 前記微小電極の外面から前記ポリマーを除去するステップをさらに含む、請求項24に記載の方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562244565P | 2015-10-21 | 2015-10-21 | |
| US62/244,565 | 2015-10-21 | ||
| US201662324067P | 2016-04-18 | 2016-04-18 | |
| US62/324,067 | 2016-04-18 | ||
| PCT/US2016/058244 WO2017070559A1 (en) | 2015-10-21 | 2016-10-21 | High density electrode mapping catheter |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018223944A Division JP6728315B2 (ja) | 2015-10-21 | 2018-11-29 | 高密度電極マッピングカテーテル |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6445742B1 true JP6445742B1 (ja) | 2018-12-26 |
| JP2019501679A JP2019501679A (ja) | 2019-01-24 |
Family
ID=58557885
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018520395A Active JP6445742B1 (ja) | 2015-10-21 | 2016-10-21 | 高密度電極マッピングカテーテル |
| JP2018223944A Active JP6728315B2 (ja) | 2015-10-21 | 2018-11-29 | 高密度電極マッピングカテーテル |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018223944A Active JP6728315B2 (ja) | 2015-10-21 | 2018-11-29 | 高密度電極マッピングカテーテル |
Country Status (5)
| Country | Link |
|---|---|
| US (4) | US10595738B2 (ja) |
| EP (3) | EP4032493A1 (ja) |
| JP (2) | JP6445742B1 (ja) |
| CN (2) | CN108289709B (ja) |
| WO (1) | WO2017070559A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11642063B2 (en) | 2018-08-23 | 2023-05-09 | St. Jude Medical, Cardiology Division, Inc. | Curved high density electrode mapping catheter |
| US11647935B2 (en) | 2017-07-24 | 2023-05-16 | St. Jude Medical, Cardiology Division, Inc. | Masked ring electrodes |
| US11672947B2 (en) | 2017-11-28 | 2023-06-13 | St. Jude Medical, Cardiology Division, Inc. | Lumen management catheter |
| US11786705B2 (en) | 2016-10-24 | 2023-10-17 | St. Jude Medical, Cardiology Division, Inc. | Catheter insertion devices |
| US11918762B2 (en) | 2018-10-03 | 2024-03-05 | St. Jude Medical, Cardiology Division, Inc. | Reduced actuation force electrophysiology catheter handle |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016081611A1 (en) | 2014-11-19 | 2016-05-26 | Advanced Cardiac Therapeutics, Inc. | High-resolution mapping of tissue with pacing |
| KR20170107428A (ko) | 2014-11-19 | 2017-09-25 | 어드밴스드 카디악 테라퓨틱스, 인크. | 고분해능 전극 어셈블리를 이용한 절제 장치, 시스템 및 방법 |
| US9820664B2 (en) | 2014-11-20 | 2017-11-21 | Biosense Webster (Israel) Ltd. | Catheter with high density electrode spine array |
| US10537259B2 (en) | 2015-06-29 | 2020-01-21 | Biosense Webster (Israel) Ltd. | Catheter having closed loop array with in-plane linear electrode portion |
| US9949656B2 (en) | 2015-06-29 | 2018-04-24 | Biosense Webster (Israel) Ltd. | Catheter with stacked spine electrode assembly |
| US10575742B2 (en) | 2015-06-30 | 2020-03-03 | Biosense Webster (Israel) Ltd. | Catheter having closed electrode assembly with spines of uniform length |
| WO2017070559A1 (en) | 2015-10-21 | 2017-04-27 | St. Jude, Cardiology Division, Inc. | High density electrode mapping catheter |
| SG11201807618QA (en) | 2016-03-15 | 2018-10-30 | Epix Therapeutics Inc | Improved devices, systems and methods for irrigated ablation |
| EP4179991B1 (en) | 2016-05-03 | 2024-04-24 | St. Jude Medical, Cardiology Division, Inc. | Irrigated high density electrode catheter |
| US11172858B2 (en) * | 2016-10-28 | 2021-11-16 | St. Jude Medical, Cardiology Division, Inc. | Flexible high-density mapping catheter |
| US11147610B2 (en) | 2017-02-10 | 2021-10-19 | Biosense Webster (Israel) Ltd. | Tissue thickness using pulsed power |
| US11116450B2 (en) * | 2017-03-09 | 2021-09-14 | Biosense Webster (Israel) Ltd. | Electrode assembly having spines with controlled flexibility |
| EP3614946B1 (en) | 2017-04-27 | 2024-03-20 | EPiX Therapeutics, Inc. | Determining nature of contact between catheter tip and tissue |
| JP7050892B2 (ja) | 2017-07-07 | 2022-04-08 | セント・ジュード・メディカル,カーディオロジー・ディヴィジョン,インコーポレイテッド | 層状高密度電極マッピングカテーテル |
| EP3681391A1 (en) * | 2017-09-12 | 2020-07-22 | Farapulse, Inc. | Systems, apparatuses, and methods for ventricular focal ablation |
| JP6936919B2 (ja) * | 2017-10-13 | 2021-09-22 | セント・ジュード・メディカル,カーディオロジー・ディヴィジョン,インコーポレイテッド | 高密度マッピング電極を有するカテーテル |
| EP3473200B1 (de) * | 2017-10-23 | 2020-10-07 | VascoMed GmbH | Ablationskatheter mit mikroelektrode und verfahren zum herstellen eines ablationskatheters |
| US11559350B2 (en) | 2017-11-28 | 2023-01-24 | St. Jude Medical, Cardiology Division, Inc. | Electrophysiology device with electrodes having increased surface area |
| KR102027053B1 (ko) * | 2018-02-14 | 2019-09-30 | 재단법인 아산사회복지재단 | 맵핑 카테터 |
| EP3530178A1 (en) * | 2018-02-27 | 2019-08-28 | Koninklijke Philips N.V. | A sensor arrangement for mounting on a guidewire or catheter |
| EP3731747B1 (en) | 2018-03-13 | 2023-11-01 | St. Jude Medical, Cardiology Division, Inc. | Variable density mapping catheter |
| WO2019195439A1 (en) * | 2018-04-05 | 2019-10-10 | St. Jude Medical, Cardiology Division, Inc. | High density electrode mapping catheter |
| EP4230165A1 (en) * | 2018-05-21 | 2023-08-23 | St. Jude Medical, Cardiology Division, Inc. | Radio-frequency ablation and direct current electroporation catheters |
| US11439338B2 (en) * | 2018-11-29 | 2022-09-13 | International Business Machines Corporation | Three-dimensional silicon-based comb probe |
| DE102020108698A1 (de) * | 2019-04-01 | 2020-10-01 | Canon Medical Systems Corporation | Medizinisches Bildverarbeitungsgerät und Programm |
| JP7434008B2 (ja) | 2019-04-01 | 2024-02-20 | キヤノンメディカルシステムズ株式会社 | 医用画像処理装置およびプログラム |
| US11850051B2 (en) | 2019-04-30 | 2023-12-26 | Biosense Webster (Israel) Ltd. | Mapping grid with high density electrode array |
| US11540878B2 (en) * | 2019-07-17 | 2023-01-03 | Biosense Webster (Israel) Ltd. | Blooming leaflet catheter with high density electrode array |
| US11259751B2 (en) | 2019-07-22 | 2022-03-01 | Biosense Webster (Isreal) Ltd. | Recording apparatus and method for noise reduction |
| KR102100591B1 (ko) * | 2019-08-27 | 2020-04-13 | 재단법인 아산사회복지재단 | 맵핑 카테터 |
| US11918751B2 (en) * | 2019-11-12 | 2024-03-05 | Biosense Webster (Israel) Ltd. | Catheter with vapor deposited features on tip |
| US11903639B2 (en) * | 2020-04-17 | 2024-02-20 | Biosense Webster (Israel) Ltd. | Flexible distal-end assembly with double-sided electrode array and irrigation |
| WO2022038546A1 (en) * | 2020-08-18 | 2022-02-24 | St. Jude Medical, Cardiology Division, Inc. | High-density electrode catheters with magnetic position tracking |
| WO2022071169A1 (ja) * | 2020-09-30 | 2022-04-07 | テルモ株式会社 | 医療デバイスシステムおよび電極部接触検出方法 |
| US20230015298A1 (en) * | 2021-07-13 | 2023-01-19 | Biosense Webster (Isreal) Ltd. | Ablation electrodes made from electrical traces of flexible printed circuit board |
| US20230190367A1 (en) * | 2021-12-17 | 2023-06-22 | Biosense Webster (Israel) Ltd. | Catheter end effector with laterally projecting body |
| WO2023122183A1 (en) * | 2021-12-21 | 2023-06-29 | CoreMap, Inc. | Devices and methods for tissue mapping |
| US20230200895A1 (en) * | 2021-12-27 | 2023-06-29 | Biosense Webster (Israel) Ltd. | Catheter end effector with resilient frame and flexible interior |
| WO2023161287A1 (en) * | 2022-02-28 | 2023-08-31 | Medtronic Ireland Manufacturing Unlimited Company | Neuromodulation catheter |
| WO2023192858A1 (en) | 2022-03-29 | 2023-10-05 | St. Jude Medical, Cardiology Division, Inc. | Multi-electrode assembly for hybrid mapping and ablation catheter |
| WO2023196810A1 (en) * | 2022-04-06 | 2023-10-12 | St. Jude Medical, Cardiology Division, Inc. | Hybrid mapping and pulsed field ablation catheter |
| CN114699087B (zh) * | 2022-05-23 | 2023-01-10 | 国家纳米科学中心 | 神经电极结构及其植入方法和制作方法 |
| CN116746943B (zh) * | 2023-08-18 | 2023-11-07 | 四川锦江电子医疗器械科技股份有限公司 | 一种医用电极标测导管 |
Family Cites Families (192)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR408E (fr) | 1902-02-08 | 1902-12-29 | Driancourt Georges | Appareil continu pour la fabrication des vins et cidres mousseux |
| US4522212A (en) | 1983-11-14 | 1985-06-11 | Mansfield Scientific, Inc. | Endocardial electrode |
| US5465717A (en) | 1991-02-15 | 1995-11-14 | Cardiac Pathways Corporation | Apparatus and Method for ventricular mapping and ablation |
| US5456254A (en) | 1991-02-15 | 1995-10-10 | Cardiac Pathways Corp | Flexible strip assembly having insulating layer with conductive pads exposed through insulating layer and device utilizing the same |
| US5224939A (en) | 1992-05-22 | 1993-07-06 | Scimed Life Systems, Inc. | Self locking guide catheter |
| US5380301A (en) | 1992-07-10 | 1995-01-10 | Sherwood Medical Company | Catheter/hub strain relief and method of manufacture thereof |
| DE69430916T2 (de) | 1993-04-28 | 2002-10-31 | Biosense Webster Inc | Elektrophysiologiekatheter mit vorgebogener spitze |
| US5715817A (en) | 1993-06-29 | 1998-02-10 | C.R. Bard, Inc. | Bidirectional steering catheter |
| US5400783A (en) | 1993-10-12 | 1995-03-28 | Cardiac Pathways Corporation | Endocardial mapping apparatus with rotatable arm and method |
| US5885278A (en) | 1994-10-07 | 1999-03-23 | E.P. Technologies, Inc. | Structures for deploying movable electrode elements |
| US5715832A (en) | 1995-02-28 | 1998-02-10 | Boston Scientific Corporation | Deflectable biopsy catheter |
| US6273404B1 (en) | 1995-06-05 | 2001-08-14 | Scimed Life Systems, Inc. | Method of making monolithic hub and strain relief |
| US5702438A (en) | 1995-06-08 | 1997-12-30 | Avitall; Boaz | Expandable recording and ablation catheter system |
| US5925038A (en) * | 1996-01-19 | 1999-07-20 | Ep Technologies, Inc. | Expandable-collapsible electrode structures for capacitive coupling to tissue |
| US5807249A (en) | 1996-02-16 | 1998-09-15 | Medtronic, Inc. | Reduced stiffness, bidirectionally deflecting catheter assembly |
| AU6112798A (en) | 1997-03-31 | 1998-10-22 | Biosense, Inc. | Deflectable catheter |
| US5876373A (en) | 1997-04-04 | 1999-03-02 | Eclipse Surgical Technologies, Inc. | Steerable catheter |
| US5827278A (en) | 1997-05-20 | 1998-10-27 | Cordis Webster, Inc. | Deflectable tip electrode catheter with nylon stiffener and compression coil |
| US6652515B1 (en) | 1997-07-08 | 2003-11-25 | Atrionix, Inc. | Tissue ablation device assembly and method for electrically isolating a pulmonary vein ostium from an atrial wall |
| US5964757A (en) | 1997-09-05 | 1999-10-12 | Cordis Webster, Inc. | Steerable direct myocardial revascularization catheter |
| US6123699A (en) | 1997-09-05 | 2000-09-26 | Cordis Webster, Inc. | Omni-directional steerable catheter |
| US6554794B1 (en) | 1997-09-24 | 2003-04-29 | Richard L. Mueller | Non-deforming deflectable multi-lumen catheter |
| US6183463B1 (en) | 1997-12-01 | 2001-02-06 | Cordis Webster, Inc. | Bidirectional steerable cathether with bidirectional control handle |
| US6171277B1 (en) | 1997-12-01 | 2001-01-09 | Cordis Webster, Inc. | Bi-directional control handle for steerable catheter |
| US6415187B1 (en) | 1998-02-10 | 2002-07-02 | Advanced Bionics Corporation | Implantable, expandable, multicontact electrodes and insertion needle for use therewith |
| US6522932B1 (en) | 1998-02-10 | 2003-02-18 | Advanced Bionics Corporation | Implantable, expandable, multicontact electrodes and tools for use therewith |
| US6074379A (en) | 1998-03-06 | 2000-06-13 | Sherwood Services Ag | Catheter strain relief device |
| US6029091A (en) | 1998-07-09 | 2000-02-22 | Irvine Biomedical, Inc. | Catheter system having lattice electrodes |
| US6198974B1 (en) | 1998-08-14 | 2001-03-06 | Cordis Webster, Inc. | Bi-directional steerable catheter |
| US6210407B1 (en) | 1998-12-03 | 2001-04-03 | Cordis Webster, Inc. | Bi-directional electrode catheter |
| US6267746B1 (en) | 1999-03-22 | 2001-07-31 | Biosense Webster, Inc. | Multi-directional steerable catheters and control handles |
| US7226467B2 (en) | 1999-04-09 | 2007-06-05 | Evalve, Inc. | Fixation device delivery catheter, systems and methods of use |
| US6795721B2 (en) | 2000-01-27 | 2004-09-21 | Biosense Webster, Inc. | Bidirectional catheter having mapping assembly |
| AU2001245528A1 (en) | 2000-03-10 | 2001-09-24 | Cardiofocus, Inc. | Steerable catheter |
| US6491681B1 (en) | 2000-04-06 | 2002-12-10 | Scimed Life Systems, Inc. | Handle for use with steerable device for introducing diagnostic and therapeutic elements into the body |
| US7387628B1 (en) | 2000-09-15 | 2008-06-17 | Boston Scientific Scimed, Inc. | Methods and systems for focused bipolar tissue ablation |
| US7123026B2 (en) * | 2001-01-23 | 2006-10-17 | Nippon Telegraph And Telephone Corporation | Surface shape recognition sensor and method of manufacturing the same |
| US6551271B2 (en) | 2001-04-30 | 2003-04-22 | Biosense Webster, Inc. | Asymmetrical bidirectional steerable catheter |
| US6652506B2 (en) | 2001-05-04 | 2003-11-25 | Cardiac Pacemakers, Inc. | Self-locking handle for steering a single or multiple-profile catheter |
| US7625365B2 (en) | 2001-09-21 | 2009-12-01 | Boston Scientific Scimed, Inc. | Intravascular device and carrier tube with interference fit member |
| US7214220B2 (en) | 2001-09-21 | 2007-05-08 | Boston Scientific Scimed, Inc. | Intravascular device with carrier tube engagement member |
| US6692492B2 (en) * | 2001-11-28 | 2004-02-17 | Cardiac Pacemaker, Inc. | Dielectric-coated ablation electrode having a non-coated window with thermal sensors |
| US6961602B2 (en) | 2001-12-31 | 2005-11-01 | Biosense Webster, Inc. | Catheter having multiple spines each having electrical mapping and location sensing capabilities |
| US9017308B2 (en) | 2002-05-21 | 2015-04-28 | Boston Scientific Scimed, Inc. | Insert molded hub and strain relief |
| US7004937B2 (en) | 2002-07-31 | 2006-02-28 | Cryocor, Inc. | Wire reinforced articulation segment |
| US7089045B2 (en) | 2002-08-30 | 2006-08-08 | Biosense Webster, Inc. | Catheter and method for mapping Purkinje fibers |
| US7027851B2 (en) | 2002-10-30 | 2006-04-11 | Biosense Webster, Inc. | Multi-tip steerable catheter |
| US7003342B2 (en) | 2003-06-02 | 2006-02-21 | Biosense Webster, Inc. | Catheter and method for mapping a pulmonary vein |
| US7217256B2 (en) | 2003-11-17 | 2007-05-15 | Angiodynamics, Inc. | Locking catheter hub |
| US20080108221A1 (en) * | 2003-12-31 | 2008-05-08 | Microfabrica Inc. | Microprobe Tips and Methods for Making |
| US7326206B2 (en) | 2004-01-16 | 2008-02-05 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Conforming-electrode catheter and method for ablation |
| EP1766672A2 (en) | 2004-05-14 | 2007-03-28 | California Institute of Technology | Parylene-based flexible multi-electrode arrays for neuronal stimulation and recording and methods for manufacturing the same |
| US7591799B2 (en) | 2004-06-14 | 2009-09-22 | Biosense Webster, Inc. | Steering mechanism for bi-directional catheter |
| US20060089637A1 (en) | 2004-10-14 | 2006-04-27 | Werneth Randell L | Ablation catheter |
| US7496394B2 (en) | 2004-11-15 | 2009-02-24 | Biosense Webster, Inc. | Internal reference coronary sinus catheter |
| US7429261B2 (en) | 2004-11-24 | 2008-09-30 | Ablation Frontiers, Inc. | Atrial ablation catheter and method of use |
| US7959601B2 (en) | 2005-02-14 | 2011-06-14 | Biosense Webster, Inc. | Steerable catheter with in-plane deflection |
| US8376990B2 (en) | 2005-05-19 | 2013-02-19 | Biosense Webster, Inc. | Steerable catheter with distal tip orientation sheaths |
| EP1895927A4 (en) | 2005-06-20 | 2011-03-09 | Medtronic Ablation Frontiers | ABLATION CATHETER |
| US8777929B2 (en) | 2005-06-28 | 2014-07-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Auto lock for catheter handle |
| US8657814B2 (en) * | 2005-08-22 | 2014-02-25 | Medtronic Ablation Frontiers Llc | User interface for tissue ablation system |
| US8968379B2 (en) | 2005-09-02 | 2015-03-03 | Medtronic Vascular, Inc. | Stent delivery system with multiple evenly spaced pullwires |
| US8608703B2 (en) | 2007-06-12 | 2013-12-17 | Medrad, Inc. | Infusion flow guidewire system |
| CN101351162A (zh) * | 2005-10-19 | 2009-01-21 | 塞梅格公司 | 在组织中以多个可选择的深度输送能量的治疗装置和方法 |
| US20070156114A1 (en) | 2005-12-29 | 2007-07-05 | Worley Seth J | Deflectable catheter with a flexibly attached tip section |
| JP4887810B2 (ja) | 2006-01-31 | 2012-02-29 | 日本ゼオン株式会社 | カテーテル挿入具およびカテーテル挿入具セット |
| US7914842B1 (en) * | 2006-02-10 | 2011-03-29 | Second Sight Medical Products, Inc | Method of manufacturing a flexible circuit electrode array |
| US7608063B2 (en) | 2006-02-23 | 2009-10-27 | Medrad, Inc. | Dual lumen aspiration catheter system |
| US8273016B2 (en) | 2006-03-10 | 2012-09-25 | Biosense Webster, Inc. | Esophagus isolation device |
| US8221390B2 (en) | 2006-04-20 | 2012-07-17 | Cook Medical Technologies Llc | Medical device delivery system having a sheath with a flared strain relief member operatively coupled by a unidirectional handle |
| US20080091169A1 (en) | 2006-05-16 | 2008-04-17 | Wayne Heideman | Steerable catheter using flat pull wires and having torque transfer layer made of braided flat wires |
| US20070270679A1 (en) | 2006-05-17 | 2007-11-22 | Duy Nguyen | Deflectable variable radius catheters |
| JP5944331B2 (ja) | 2006-05-17 | 2016-07-05 | セント・ジュード・メディカル・エイトリアル・フィブリレーション・ディヴィジョン・インコーポレーテッド | カテーテルハンドル用自動ロック |
| WO2007136984A2 (en) | 2006-05-17 | 2007-11-29 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Auto lock for catheter handle |
| US7774039B2 (en) | 2006-09-05 | 2010-08-10 | Boston Scientific Scimed, Inc. | Multi-bend steerable mapping catheter |
| WO2008045877A2 (en) | 2006-10-10 | 2008-04-17 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Electrode tip and ablation system |
| US9314618B2 (en) * | 2006-12-06 | 2016-04-19 | Spinal Modulation, Inc. | Implantable flexible circuit leads and methods of use |
| CA2676021C (en) | 2007-01-23 | 2013-12-31 | Neuronano Ab | Dissociating multi-channel electrode |
| US8744599B2 (en) | 2007-03-09 | 2014-06-03 | St. Jude Medical, Atrial Fibrillation Division, Inc. | High density mapping catheter |
| WO2008141150A2 (en) | 2007-05-09 | 2008-11-20 | Irvine Biomedical, Inc. | Basket catheter having multiple electrodes |
| WO2008157399A1 (en) | 2007-06-14 | 2008-12-24 | Hansen Medical, Inc. | System and method for determining electrode-tissue contact |
| US20080312521A1 (en) | 2007-06-14 | 2008-12-18 | Solomon Edward G | System and method for determining electrode-tissue contact using phase difference |
| WO2009052423A1 (en) | 2007-10-17 | 2009-04-23 | Neuronexus Technologies | Three-dimensional system of electrode leads |
| US8475449B2 (en) * | 2007-12-10 | 2013-07-02 | Medtronic Ablation Frontiers Llc | RF energy delivery system and method |
| US8103327B2 (en) | 2007-12-28 | 2012-01-24 | Rhythmia Medical, Inc. | Cardiac mapping catheter |
| US7985215B2 (en) | 2007-12-28 | 2011-07-26 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Deflectable catheter with distal deflectable segment |
| US8157848B2 (en) | 2008-02-01 | 2012-04-17 | Siemens Medical Solutions Usa, Inc. | System for characterizing patient tissue impedance for monitoring and treatment |
| CA2717057A1 (en) * | 2008-03-06 | 2009-09-11 | Stryker Corporation | Foldable, implantable electrode array assembly and tool for implanting same |
| ATE529151T1 (de) | 2008-06-16 | 2011-11-15 | Greatbatch Ltd | Bidirektionale asymmetrische lenkbare ummantelung |
| CA2743140A1 (en) * | 2008-11-11 | 2010-05-20 | Shifamed, Llc | Low profile electrode assembly |
| US9082438B2 (en) * | 2008-12-02 | 2015-07-14 | Panasonic Corporation | Three-dimensional structure for wiring formation |
| US8712550B2 (en) | 2008-12-30 | 2014-04-29 | Biosense Webster, Inc. | Catheter with multiple electrode assemblies for use at or near tubular regions of the heart |
| US8556850B2 (en) | 2008-12-31 | 2013-10-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Shaft and handle for a catheter with independently-deflectable segments |
| US8696917B2 (en) * | 2009-02-09 | 2014-04-15 | Edwards Lifesciences Corporation | Analyte sensor and fabrication methods |
| US8500733B2 (en) | 2009-02-20 | 2013-08-06 | Boston Scientific Scimed, Inc. | Asymmetric dual directional steerable catheter sheath |
| US8271099B1 (en) | 2009-03-23 | 2012-09-18 | Advanced Neuromodulation Systems, Inc. | Implantable paddle lead comprising compressive longitudinal members for supporting electrodes and method of fabrication |
| US8287532B2 (en) | 2009-04-13 | 2012-10-16 | Biosense Webster, Inc. | Epicardial mapping and ablation catheter |
| US8706193B2 (en) | 2009-06-22 | 2014-04-22 | Biosense Webster, Inc. | Catheter with obliquely-oriented coils |
| US8795504B2 (en) | 2009-08-27 | 2014-08-05 | University Of Southern California | Electrodeposition of platinum/iridium (Pt/Ir) on Pt microelectrodes with improved charge injection properties |
| US9339631B2 (en) | 2009-09-25 | 2016-05-17 | Boston Scientific Scimed, Inc. | Locking mechanism for a medical device |
| US9101733B2 (en) | 2009-09-29 | 2015-08-11 | Biosense Webster, Inc. | Catheter with biased planar deflection |
| JP6013186B2 (ja) | 2009-11-13 | 2016-10-25 | セント ジュード メディカル インコーポレイテッド | 千鳥配置された焼灼素子のアセンブリ |
| AU2011252740B2 (en) | 2010-05-11 | 2015-05-28 | Cathrx Ltd | A catheter handle |
| US8137321B2 (en) | 2010-05-12 | 2012-03-20 | Medtronic Vascular, Inc. | Introducer sheath |
| JP4940332B2 (ja) | 2010-06-15 | 2012-05-30 | 日本ライフライン株式会社 | カテーテル |
| JP2012055602A (ja) | 2010-09-13 | 2012-03-22 | Terumo Corp | カテーテル |
| US8560086B2 (en) * | 2010-12-02 | 2013-10-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Catheter electrode assemblies and methods of construction therefor |
| US8391947B2 (en) | 2010-12-30 | 2013-03-05 | Biosense Webster (Israel), Ltd. | Catheter with sheet array of electrodes |
| EP2627243B1 (en) | 2010-12-30 | 2020-01-22 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System for diagnosing arrhythmias and directing catheter therapies |
| US8792962B2 (en) | 2010-12-30 | 2014-07-29 | Biosense Webster, Inc. | Catheter with single axial sensors |
| US9044245B2 (en) | 2011-01-05 | 2015-06-02 | Medtronic Ablation Frontiers Llc | Multipolarity epicardial radiofrequency ablation |
| JP2012200509A (ja) | 2011-03-28 | 2012-10-22 | Terumo Corp | カテーテルハブ及びカテーテル |
| EP2699151B1 (en) | 2011-04-22 | 2015-11-25 | Topera, Inc. | Basket style cardiac mapping catheter having spline bends for detection of cardiac rhythm disorders |
| US20120296232A1 (en) | 2011-05-18 | 2012-11-22 | St. Jude Medical, Inc. | Method and apparatus of assessing transvascular denervation |
| CN106175853B (zh) | 2011-08-25 | 2019-03-01 | 柯惠有限合伙公司 | 消融装置和用于给目标治疗区输送治疗的系统 |
| US20190110704A1 (en) | 2017-10-06 | 2019-04-18 | Symap Medical (Suzhou), Limited | System and method for mapping the functional nerves innervating the wall of arteries, 3-d mapping and catheters for same |
| US8649880B1 (en) | 2011-10-07 | 2014-02-11 | Autry J. Parker, Jr. | Deployable stimulator array and method of use |
| KR20130057314A (ko) * | 2011-11-23 | 2013-05-31 | 삼성전기주식회사 | 인쇄회로기판 및 인쇄회로기판 제조 방법 |
| JP6441679B2 (ja) | 2011-12-09 | 2018-12-19 | メタベンション インコーポレイテッド | 肝臓系の治療的な神経調節 |
| JP5908270B2 (ja) | 2011-12-12 | 2016-04-26 | テルモ株式会社 | カテーテル |
| JP5550150B2 (ja) | 2011-12-14 | 2014-07-16 | 日本ライフライン株式会社 | 先端偏向操作可能カテーテル |
| CN104041132B (zh) | 2012-01-13 | 2016-01-20 | 三菱电机株式会社 | 无线通信装置以及无线通信方法 |
| US9216056B2 (en) | 2012-03-02 | 2015-12-22 | Biosense Webster (Israel) Ltd. | Catheter for treatment of atrial flutter having single action dual deflection mechanism |
| US9314299B2 (en) | 2012-03-21 | 2016-04-19 | Biosense Webster (Israel) Ltd. | Flower catheter for mapping and ablating veinous and other tubular locations |
| US10004877B2 (en) | 2012-05-07 | 2018-06-26 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Deflectable catheter shaft section, catheter incorporating same, and method of manufacturing same |
| US9717555B2 (en) | 2012-05-14 | 2017-08-01 | Biosense Webster (Israel), Ltd. | Catheter with helical end section for vessel ablation |
| EP2866875A4 (en) | 2012-06-29 | 2016-06-08 | Univ Washington Ct Commerciali | CATHETERS FOR EMERGENCY ENDOVASCULAR SURGERY AND DEVICES, SYSTEMS AND RELATED METHODS |
| US8931557B2 (en) * | 2012-07-09 | 2015-01-13 | Halliburton Energy Services, Inc. | Wellbore servicing assemblies and methods of using the same |
| US9033917B2 (en) | 2012-08-15 | 2015-05-19 | Abbott Cardiovascular Systems Inc. | Needle catheter for delivery of agents directly into vessel wall |
| US8986150B2 (en) | 2012-09-07 | 2015-03-24 | Dana Limited | Ball type continuously variable transmission/infinitely variable transmission |
| KR101450859B1 (ko) | 2012-10-10 | 2014-10-15 | 한국과학기술연구원 | 염증 억제용 약물을 구비한 신경 전극 및 그 제조 방법 |
| EP2914957A4 (en) * | 2012-10-30 | 2016-06-15 | Edwards Lifesciences Corp | ANALYTE SENSOR AND METHODS OF MANUFACTURE |
| US9433752B2 (en) | 2012-11-14 | 2016-09-06 | Biosense Webster (Israel) Ltd. | Catheter with flat beam deflection in tip |
| US9694161B2 (en) | 2012-11-14 | 2017-07-04 | Biosense Webster (Israel), Ltd. | Catheter with flat beam providing nonsymmetrical curve bi-directional deflection |
| US9248255B2 (en) | 2012-11-14 | 2016-02-02 | Biosense Webster (Israel) Ltd. | Catheter with improved torque transmission |
| US9833608B2 (en) | 2012-11-20 | 2017-12-05 | NeuroTronik IP Holding (Jersey) Limited | Positioning methods for intravascular electrode arrays for neuromodulation |
| US20140316496A1 (en) | 2012-11-21 | 2014-10-23 | NeuroTronik IP Holding (Jersey) Limited | Intravascular Electrode Arrays for Neuromodulation |
| US8894610B2 (en) | 2012-11-28 | 2014-11-25 | Hansen Medical, Inc. | Catheter having unirail pullwire architecture |
| US9050010B2 (en) | 2012-12-31 | 2015-06-09 | Biosense Webster (Israel) Ltd. | Double loop lasso with single puller wire for bi-directional actuation |
| US10537286B2 (en) | 2013-01-08 | 2020-01-21 | Biosense Webster (Israel) Ltd. | Catheter with multiple spines of different lengths arranged in one or more distal assemblies |
| US8880158B2 (en) | 2013-01-16 | 2014-11-04 | University Of Vermont | Methods and systems for determining spatiotemporal variability for mapping cardiac fibrillation |
| US11571160B2 (en) | 2013-01-16 | 2023-02-07 | University Of Vermont | Methods and systems for wavelength mapping cardiac fibrillation and optimizing ablation lesion placement |
| US10912476B2 (en) | 2013-01-16 | 2021-02-09 | University Of Vermont | Catheters, systems, and related methods for mapping, minimizing, and treating cardiac fibrillation |
| US20140200639A1 (en) | 2013-01-16 | 2014-07-17 | Advanced Neuromodulation Systems, Inc. | Self-expanding neurostimulation leads having broad multi-electrode arrays |
| CA2899311C (en) * | 2013-02-08 | 2021-05-11 | Acutus Medical, Inc. | Expandable catheter assembly with flexible printed circuit board (pcb) electrical pathways |
| US9486280B2 (en) | 2013-03-13 | 2016-11-08 | Boston Scientific Scimed, Inc. | Steerable ablation device with linear ionically conductive balloon |
| US9855404B2 (en) | 2013-05-03 | 2018-01-02 | St. Jude Medical International Holding S.À R.L. | Dual bend radii steering catheter |
| CN105358084B (zh) * | 2013-07-01 | 2018-11-09 | 波士顿科学国际有限公司 | 用于肾神经消融的医疗器械 |
| WO2015020952A1 (en) * | 2013-08-04 | 2015-02-12 | President And Fellows Of Harvard College | Pop-up laminate structures with integrated electronics |
| CN105530885B (zh) * | 2013-09-13 | 2020-09-22 | 波士顿科学国际有限公司 | 具有气相沉积覆盖层的消融球囊 |
| US9204929B2 (en) | 2013-09-16 | 2015-12-08 | Biosense Webster (Israel) Ltd. | Basket catheter with deflectable spine |
| EP3057488B1 (en) | 2013-10-14 | 2018-05-16 | Boston Scientific Scimed, Inc. | High resolution cardiac mapping electrode array catheter |
| US20150119911A1 (en) | 2013-10-25 | 2015-04-30 | Gladys MCKENZIE | Tongue scraper |
| US10105073B2 (en) | 2013-11-21 | 2018-10-23 | Biosense Webster (Israel) Ltd | Flexible multiple-arm diagnostic catheter |
| JP6574421B2 (ja) | 2013-12-10 | 2019-09-11 | セント・ジュード・メディカル・エイトリアル・フィブリレーション・ディヴィジョン・インコーポレーテッド | カテーテル曲線形状ストラット |
| EP3062688B1 (en) | 2013-12-20 | 2019-01-16 | St. Jude Medical, Cardiology Division, Inc. | Coaxial electrode catheters for extracting electrophysiologic parameters |
| JP2017051211A (ja) | 2014-01-27 | 2017-03-16 | テルモ株式会社 | カテーテルおよびカテーテルハブ |
| US9750422B2 (en) | 2014-02-12 | 2017-09-05 | Biosense Webster (Israel) Ltd | Catheter with transverse branches |
| US10136829B2 (en) | 2014-02-25 | 2018-11-27 | St. Jude Medical, Cardiology Division, Inc. | Systems and methods for using electrophysiology properties for classifying arrhythmia sources |
| EP3115076B1 (en) | 2014-03-04 | 2023-03-29 | Terumo Kabushiki Kaisha | Catheter |
| US9986949B2 (en) | 2014-03-05 | 2018-06-05 | Biosense Webster (Israel) Ltd. | Multi-arm catheter with signal transmission over braid wires |
| WO2015137098A1 (ja) | 2014-03-14 | 2015-09-17 | テルモ株式会社 | 医療用チューブ |
| EP3131616B1 (en) | 2014-04-15 | 2019-11-20 | QMax, LLC | Helical balloon catheter |
| US10556091B2 (en) | 2014-05-07 | 2020-02-11 | St. Jude Medical, Cardiology Division, Inc. | Threaded, locking handle mechanism for attaching to shaft |
| US9848795B2 (en) * | 2014-06-04 | 2017-12-26 | Boston Scientific Scimed Inc. | Electrode assembly |
| US10118022B2 (en) | 2014-06-05 | 2018-11-06 | St. Jude Medical, Cardiology Division, Inc. | Deflectable catheter shaft section |
| EP3122276B1 (en) | 2014-06-17 | 2018-11-07 | St. Jude Medical, Cardiology Division, Inc. | Asymmetric catheter curve shapes |
| US9844645B2 (en) | 2014-06-17 | 2017-12-19 | St. Jude Medical, Cardiology Division, Inc. | Triple coil catheter support |
| US9498142B2 (en) | 2014-07-03 | 2016-11-22 | Heraeus Deutschland GmbH & Co. KG | Multi-layered structure and method |
| US9474894B2 (en) * | 2014-08-27 | 2016-10-25 | Aleva Neurotherapeutics | Deep brain stimulation lead |
| CN107529958B (zh) | 2014-10-20 | 2021-07-27 | 研发国际公司 | 可操纵微型内窥镜 |
| US9314208B1 (en) | 2014-10-28 | 2016-04-19 | Biosense Webster (Israel) Ltd. | Basket catheter with microelectrode array distal tip |
| US9820664B2 (en) | 2014-11-20 | 2017-11-21 | Biosense Webster (Israel) Ltd. | Catheter with high density electrode spine array |
| CA2969129A1 (en) | 2014-12-03 | 2016-06-09 | Metavention, Inc. | Systems and methods for modulating nerves or other tissue |
| CN107205774B (zh) | 2015-01-28 | 2020-05-29 | 圣犹达医疗用品心脏病学部门有限公司 | 热标测导管 |
| US20160278851A1 (en) | 2015-03-23 | 2016-09-29 | Medtronic Cryocath Lp | Steerable catheter having pull wires affixed within the distal portion of the catheter |
| US9636244B2 (en) | 2015-04-09 | 2017-05-02 | Mubin I. Syed | Apparatus and method for proximal to distal stent deployment |
| US10194994B2 (en) | 2015-05-12 | 2019-02-05 | St. Jude Medical, Cardiology Division, Inc. | Systems and methods for orientation independent sensing |
| US20160331933A1 (en) | 2015-05-14 | 2016-11-17 | Medtronic Cryocath Lp | Dual deflection pull wire ring |
| US11033715B2 (en) | 2015-05-18 | 2021-06-15 | Biosense Webster (Israel) Ltd. | Catheter with adjustable deflection |
| US9949656B2 (en) | 2015-06-29 | 2018-04-24 | Biosense Webster (Israel) Ltd. | Catheter with stacked spine electrode assembly |
| US10537259B2 (en) | 2015-06-29 | 2020-01-21 | Biosense Webster (Israel) Ltd. | Catheter having closed loop array with in-plane linear electrode portion |
| US10575742B2 (en) | 2015-06-30 | 2020-03-03 | Biosense Webster (Israel) Ltd. | Catheter having closed electrode assembly with spines of uniform length |
| CN104958824B (zh) | 2015-07-30 | 2018-12-21 | 湖南埃普特医疗器械有限公司 | 一种导引导管 |
| US10376170B2 (en) | 2015-08-10 | 2019-08-13 | Boston Scientific Scimed, Inc. | Catheter with annular lumen to provide distal flushing |
| US10987045B2 (en) | 2015-09-14 | 2021-04-27 | Biosense Webster (Israel) Ltd. | Basket catheter with individual spine control |
| US20170106170A1 (en) | 2015-10-19 | 2017-04-20 | Biocardia, Inc. | Multi-Directional Steerable Catheter |
| WO2017070559A1 (en) | 2015-10-21 | 2017-04-27 | St. Jude, Cardiology Division, Inc. | High density electrode mapping catheter |
| CN111657866B (zh) | 2015-10-21 | 2023-10-20 | 圣犹达医疗用品心脏病学部门有限公司 | 高密度电极标测导管 |
| US10702177B2 (en) | 2016-08-24 | 2020-07-07 | Biosense Webster (Israel) Ltd. | Catheter with bipole electrode spacer and related methods |
| WO2018106496A1 (en) | 2016-12-05 | 2018-06-14 | University Of Vermont | Catheters, systems, and related methods for mapping, minimizing, and treating cardiac fibrillation |
| CA3121576A1 (en) | 2018-11-30 | 2020-06-04 | University Of Vermont | Methods and systems for wavelength mapping cardiac fibrillation and optimizing ablation lesion placement |
-
2016
- 2016-10-21 WO PCT/US2016/058244 patent/WO2017070559A1/en active Application Filing
- 2016-10-21 JP JP2018520395A patent/JP6445742B1/ja active Active
- 2016-10-21 EP EP21217452.8A patent/EP4032493A1/en active Pending
- 2016-10-21 EP EP20203250.4A patent/EP3791820B9/en active Active
- 2016-10-21 CN CN201680067910.9A patent/CN108289709B/zh active Active
- 2016-10-21 CN CN202210137915.1A patent/CN114668490A/zh active Pending
- 2016-10-21 US US15/331,562 patent/US10595738B2/en active Active
- 2016-10-21 EP EP16858360.7A patent/EP3340916B1/en active Active
-
2018
- 2018-11-29 JP JP2018223944A patent/JP6728315B2/ja active Active
-
2020
- 2020-02-04 US US16/781,499 patent/US11642064B2/en active Active
- 2020-02-19 US US16/795,335 patent/US11039773B2/en active Active
-
2022
- 2022-09-16 US US17/946,260 patent/US20230011509A1/en active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11786705B2 (en) | 2016-10-24 | 2023-10-17 | St. Jude Medical, Cardiology Division, Inc. | Catheter insertion devices |
| US11647935B2 (en) | 2017-07-24 | 2023-05-16 | St. Jude Medical, Cardiology Division, Inc. | Masked ring electrodes |
| US11672947B2 (en) | 2017-11-28 | 2023-06-13 | St. Jude Medical, Cardiology Division, Inc. | Lumen management catheter |
| US11813410B2 (en) | 2017-11-28 | 2023-11-14 | St. Jude Medical, Cardiology Division, Inc. | Controllable expandable catheter |
| US11642063B2 (en) | 2018-08-23 | 2023-05-09 | St. Jude Medical, Cardiology Division, Inc. | Curved high density electrode mapping catheter |
| US11918762B2 (en) | 2018-10-03 | 2024-03-05 | St. Jude Medical, Cardiology Division, Inc. | Reduced actuation force electrophysiology catheter handle |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3791820B1 (en) | 2022-02-09 |
| WO2017070559A1 (en) | 2017-04-27 |
| CN114668490A (zh) | 2022-06-28 |
| US20200253497A1 (en) | 2020-08-13 |
| EP3791820A1 (en) | 2021-03-17 |
| EP3340916A1 (en) | 2018-07-04 |
| EP3791820B9 (en) | 2022-04-27 |
| EP3340916B1 (en) | 2020-12-02 |
| CN108289709B (zh) | 2022-03-04 |
| US20170112405A1 (en) | 2017-04-27 |
| US10595738B2 (en) | 2020-03-24 |
| JP6728315B2 (ja) | 2020-07-22 |
| JP2019501679A (ja) | 2019-01-24 |
| US11642064B2 (en) | 2023-05-09 |
| US20200229726A1 (en) | 2020-07-23 |
| EP3340916A4 (en) | 2019-04-24 |
| US11039773B2 (en) | 2021-06-22 |
| JP2019063546A (ja) | 2019-04-25 |
| US20230011509A1 (en) | 2023-01-12 |
| CN108289709A (zh) | 2018-07-17 |
| EP4032493A1 (en) | 2022-07-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6445742B1 (ja) | 高密度電極マッピングカテーテル | |
| US20200261152A1 (en) | Irrigated balloon catheter with flexible circuit electrode assembly | |
| US10105073B2 (en) | Flexible multiple-arm diagnostic catheter | |
| US20070219551A1 (en) | Medical device with flexible printed circuit | |
| CN105125283B (zh) | 具有多个热电偶的导管电极 | |
| US20210153932A1 (en) | High density electrode mapping catheter | |
| US20220054198A1 (en) | High-density electrode catheters with magnetic position tracking | |
| EP3009092B1 (en) | Effective parasitic capacitance minimization for micro ablation electrode | |
| US11950840B2 (en) | Basket catheter having insulated ablation electrodes | |
| US20220087735A1 (en) | Basket catheter having insulated ablation electrodes and diagnostic electrodes | |
| JP2021045545A (ja) | 軟質シールド位置センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181022 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181129 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6445742 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |