JP6410939B2 - モータ制御装置、圧縮機、及び空気調和機 - Google Patents
モータ制御装置、圧縮機、及び空気調和機 Download PDFInfo
- Publication number
- JP6410939B2 JP6410939B2 JP2017528018A JP2017528018A JP6410939B2 JP 6410939 B2 JP6410939 B2 JP 6410939B2 JP 2017528018 A JP2017528018 A JP 2017528018A JP 2017528018 A JP2017528018 A JP 2017528018A JP 6410939 B2 JP6410939 B2 JP 6410939B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- current
- load torque
- value
- calculating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004364 calculation method Methods 0.000 claims description 36
- 238000001514 detection method Methods 0.000 claims description 35
- 230000004907 flux Effects 0.000 claims description 34
- 238000012937 correction Methods 0.000 claims description 27
- 239000003507 refrigerant Substances 0.000 claims description 18
- 230000006837 decompression Effects 0.000 claims description 7
- 239000003990 capacitor Substances 0.000 claims description 6
- 238000009499 grossing Methods 0.000 claims description 6
- 238000005057 refrigeration Methods 0.000 claims description 5
- 229910002601 GaN Inorganic materials 0.000 claims description 2
- JMASRVWKEDWRBT-UHFFFAOYSA-N Gallium nitride Chemical compound [Ga]#N JMASRVWKEDWRBT-UHFFFAOYSA-N 0.000 claims description 2
- 229910003460 diamond Inorganic materials 0.000 claims description 2
- 239000010432 diamond Substances 0.000 claims description 2
- HBMJWWWQQXIZIP-UHFFFAOYSA-N silicon carbide Chemical compound [Si+]#[C-] HBMJWWWQQXIZIP-UHFFFAOYSA-N 0.000 claims description 2
- 229910010271 silicon carbide Inorganic materials 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 14
- 238000000034 method Methods 0.000 description 13
- 230000001360 synchronised effect Effects 0.000 description 12
- 238000006243 chemical reaction Methods 0.000 description 11
- 239000007788 liquid Substances 0.000 description 11
- 238000004804 winding Methods 0.000 description 7
- 230000002159 abnormal effect Effects 0.000 description 3
- 230000005347 demagnetization Effects 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 241001290864 Schoenoplectus Species 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 239000002826 coolant Substances 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 229910052761 rare earth metal Inorganic materials 0.000 description 1
- 150000002910 rare earth metals Chemical class 0.000 description 1
- 238000010992 reflux Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000010257 thawing Methods 0.000 description 1
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/28—Arrangements for controlling current
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/15—Controlling commutation time
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/26—Power factor control [PFC]
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/024—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load
- H02P29/0241—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load the fault being an overvoltage
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
図1は本発明の実施の形態1に係る空気調和機100及びモータ制御装置200の回路構成及び制御ブロック図を示す概念図である。図2は本発明の実施の形態1に係るモータ制御装置200の磁束ベクトル制御を構成するベクトル図である。
[数1]
N[min−1] = 120×f/p ・・・(1)
[数2]
ω = 2×π×f − K×Iδ ・・・(2)
ここで角速度ωは周波数補償手段24によって補償された最終の角速度である。fは圧縮機回転数指令により得られるインバータ出力周波数である。Kはトルク成分電流Iδに対する周波数補償量の比例ゲインである。
[数3]
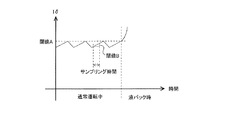
Iδ変化量= 現在Iδ検出値 − 前回値 ・・・(3)
[数4]
現在Iδ検出値 > 閾値A ・・・(4)
[数5]
Iδ変化量 > 閾値B ・・・(5)
本実施の形態2においては、実施の形態1とは異なり、負荷トルク検知手段26として、座標変換されたIδではなく、実効値算出手段26a、不平衡算出手段26b、力率算出手段26cを用いるようにしたものである。なお、本実施の形態2に係る空気調和機100は、実施の形態1とは異なる構成及び動作について説明し、実施の形態1の空気調和機100と同一の構成部材については同一の符号を用いるものとする。
ΔU−V = Iu(実効値)−Iv(実効値)
ΔV−W = Iv(実効値)−Iw(実効値)
ΔW−U = Iw(実効値)−Iu(実効値)
通常の圧縮機29の運転中であれば図6のように3相の電流実効値はバランスしているため、ΔU−V、ΔV−W、ΔW−Uはほぼ0Aとなる。モータ30がロックした状態等では、各相インダクタンスが不平衡になることでモータ30の三相交流電流が不平衡となる(図7)。また、モータ30とインバータ回路11とを接続する配線、又は固定子巻線等が断線した欠相運転状態においては、各相電流実効値の不平衡量より一層が大きくなる(図8)。
[数6]
θv = Tan−1(Vδ/Vγ) ・・・(6)
[数7]
θi = Tan−1(Iδ/Iγ) ・・・(7)
Claims (9)
- モータを制御するモータ制御装置であって、
前記モータの負荷トルクを検知する負荷トルク検知手段と、
前記負荷トルク検知手段が検知した前記負荷トルクが増加するほど前記モータに流れる電流を増加させる電流補正手段と、を有し、
前記負荷トルク検知手段は、
前記モータの力率を算出する力率算出手段を備え、
前記電流補正手段は、
前記力率算出手段によって算出される前記モータの力率が第2基準値以下である場合に、前記負荷トルクが増加したものとして前記モータに流れる電流を増加させる
モータ制御装置。 - モータを制御するモータ制御装置であって、
前記モータの負荷トルクを検知する負荷トルク検知手段と、
前記負荷トルク検知手段が検知した前記負荷トルクが増加するほど前記モータに流れる電流を増加させる電流補正手段と、を有し、
前記負荷トルク検知手段は、
前記モータの電流実効値を算出する実効値算出手段と、
前記実効値算出手段によって算出される三相間の電流実効値の不平衡量を算出する不平衡算出手段と、を備え、
前記電流補正手段は、
前記不平衡算出手段によって算出される前記不平衡量が第1基準値よりも大きい場合に、前記負荷トルクが増加したものとして前記モータに流れる電流を増加させる
モータ制御装置。 - モータを制御するモータ制御装置であって、
前記モータの負荷トルクを検知する負荷トルク検知手段と、
前記負荷トルク検知手段が検知した前記負荷トルクが増加するほど前記モータに流れる電流を増加させる電流補正手段と、を有し、
前記負荷トルク検知手段は、
前記モータの電流実効値を算出する実効値算出手段と、
前記実効値算出手段によって算出される三相間の電流実効値の不平衡量を算出する不平衡算出手段と、
前記モータの力率を算出する力率算出手段と、を備え、
前記電流補正手段は、
前記不平衡算出手段によって算出される前記不平衡量が第1基準値よりも大きい場合又は前記力率算出手段によって算出される前記モータの力率が第2基準値以下である場合に、前記負荷トルクが増加したものとして前記モータに流れる電流を増加させる
モータ制御装置。 - 前記モータの総磁束を基準値に保つように制御を行う位置センサレス制御手段を備える
請求項1〜請求項3の何れか一項に記載のモータ制御装置。 - 請求項1〜4の何れか一項に記載のモータ制御装置によって制御される前記モータを備えた
圧縮機。 - 請求項5に記載の圧縮機と、
前記モータの電流を検出する電流検出手段と、
前記電流検出手段によって検出される電流値が電流基準値以上である場合に前記モータ制御装置を停止させる過電流保護手段と、を備えた
空気調和機。 - 請求項5に記載の圧縮機と、
三相交流電源の整流された直流電圧を平滑する平滑コンデンサと、
前記平滑コンデンサにより平滑された直流電圧を交流電圧に変換するインバータ回路と、を備えた
空気調和機。 - 前記インバータ回路のスイッチング素子は、
炭化珪素素子、窒化ガリウム系の素子、又はダイヤモンド素子によって構成される
請求項7に記載の空気調和機。 - 請求項5に記載の圧縮機と、凝縮器と、減圧装置と、蒸発器と、が冷媒配管によって接続されて構成された冷凍サイクル回路を有する
空気調和機。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/069948 WO2017009907A1 (ja) | 2015-07-10 | 2015-07-10 | モータ制御装置、圧縮機、及び空気調和機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017009907A1 JPWO2017009907A1 (ja) | 2018-02-22 |
| JP6410939B2 true JP6410939B2 (ja) | 2018-10-24 |
Family
ID=57757849
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017528018A Active JP6410939B2 (ja) | 2015-07-10 | 2015-07-10 | モータ制御装置、圧縮機、及び空気調和機 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3322087A4 (ja) |
| JP (1) | JP6410939B2 (ja) |
| WO (1) | WO2017009907A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024106339A1 (ja) * | 2022-11-15 | 2024-05-23 | 株式会社日立製作所 | 電力変換装置、電力変換回路の制御方法 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11496077B2 (en) * | 2018-08-07 | 2022-11-08 | Nidec Corporation | Drive controller, drive unit, and power steering |
| CN115095968B (zh) * | 2022-07-08 | 2024-06-18 | 北京小米移动软件有限公司 | 转矩补偿控制方法、装置和存储介质 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001169597A (ja) * | 1999-12-03 | 2001-06-22 | Yaskawa Electric Corp | 同期電動機の駆動電流直流成分の補正方法および補正装置 |
| JP2005059786A (ja) * | 2003-08-18 | 2005-03-10 | Koyo Seiko Co Ltd | 電動パワーステアリング装置 |
| JP4578142B2 (ja) * | 2004-04-22 | 2010-11-10 | 日本電産シバウラ株式会社 | ブラシレスdcモータの駆動装置 |
| JP4641179B2 (ja) * | 2004-11-25 | 2011-03-02 | 川崎重工業株式会社 | 同期モータの制御方法および制御装置 |
| JP4693904B2 (ja) * | 2006-08-31 | 2011-06-01 | 三菱電機株式会社 | 電動機駆動装置及び圧縮機駆動装置 |
| JP4930085B2 (ja) * | 2007-02-08 | 2012-05-09 | 株式会社富士通ゼネラル | 位相検出方法、位相検出装置、同期モータの制御方法、および同期モータの制御装置 |
| JP5175887B2 (ja) * | 2010-03-23 | 2013-04-03 | 株式会社東芝 | モータ制御装置及び電気機器 |
| US8487557B2 (en) * | 2011-02-15 | 2013-07-16 | General Electric Company | Use of motor protection system to protect process operation |
| JP5253593B2 (ja) * | 2012-02-14 | 2013-07-31 | 三菱電機株式会社 | 空気調和機 |
| JP5851303B2 (ja) * | 2012-03-28 | 2016-02-03 | 三菱電機株式会社 | 冷凍サイクル装置および室外熱源ユニット |
| CN103701372B (zh) * | 2012-09-27 | 2017-07-04 | 比亚迪股份有限公司 | 一种同步电机的失步检测方法 |
-
2015
- 2015-07-10 WO PCT/JP2015/069948 patent/WO2017009907A1/ja active Application Filing
- 2015-07-10 EP EP15898223.1A patent/EP3322087A4/en active Pending
- 2015-07-10 JP JP2017528018A patent/JP6410939B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024106339A1 (ja) * | 2022-11-15 | 2024-05-23 | 株式会社日立製作所 | 電力変換装置、電力変換回路の制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3322087A1 (en) | 2018-05-16 |
| EP3322087A4 (en) | 2018-07-11 |
| JPWO2017009907A1 (ja) | 2018-02-22 |
| WO2017009907A1 (ja) | 2017-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6333563B2 (ja) | インバータ制御装置およびそれを用いた冷凍装置 | |
| JP3684203B2 (ja) | モータ制御装置 | |
| WO2016002074A1 (ja) | 電力変換装置、除湿機、空調装置および冷凍装置 | |
| JP7105961B2 (ja) | モータ駆動装置及び冷凍サイクル適用機器 | |
| JP2002247876A (ja) | インバータ装置、圧縮機制御装置、冷凍・空調装置の制御装置、モータの制御方法、圧縮機、冷凍・空調装置 | |
| CN112272917B (zh) | 电机驱动装置及制冷循环应用设备 | |
| JP6410939B2 (ja) | モータ制御装置、圧縮機、及び空気調和機 | |
| JPWO2020194695A1 (ja) | 駆動装置および空気調和装置 | |
| JP4804100B2 (ja) | モータ駆動装置及びその制御方法、空気調和装置 | |
| JP6929434B2 (ja) | 電動機駆動装置及び冷凍サイクル適用機器 | |
| JP6309173B2 (ja) | モータ駆動装置ならびにモータ駆動装置を用いたヒートポンプ装置、冷凍空調装置および送風装置 | |
| JP2010226842A (ja) | ブラシレスdcモータの制御方法およびブラシレスdcモータの制御装置 | |
| JP2009153247A (ja) | モータ駆動制御装置、モータ駆動制御方法及び座標変換方法、並びに換気扇、液体用ポンプ、送風機、冷媒圧縮機、空気調和機及び冷蔵庫 | |
| WO2014155622A1 (ja) | ヒートポンプ装置、空気調和機及び冷凍機 | |
| WO2020174621A1 (ja) | モータ駆動装置及び空気調和機 | |
| JPWO2014049867A1 (ja) | ヒートポンプ装置、空気調和機及び冷凍機 | |
| JP2004040861A (ja) | モータの駆動装置 | |
| JP2014187802A (ja) | モータ駆動装置 | |
| CN112219350B (zh) | 马达驱动装置、马达驱动装置的控制装置、马达驱动装置的控制方法以及空气调节机 | |
| JP2012165582A (ja) | モータ制御装置 | |
| JP2006136167A (ja) | 電力変換装置、電力変換装置の制御方法及び空気調和装置 | |
| JP2009189106A (ja) | モータ制御装置およびその方法 | |
| WO2023095311A1 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| WO2023162106A1 (ja) | モータ駆動装置及び冷凍サイクル装置 | |
| JP2010288348A (ja) | 同期モータの制御装置とそれを用いた冷凍装置および空調装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171020 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171020 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180828 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180925 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6410939 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |