JP6388285B2 - ハイブリッド式建設機械 - Google Patents
ハイブリッド式建設機械 Download PDFInfo
- Publication number
- JP6388285B2 JP6388285B2 JP2015040997A JP2015040997A JP6388285B2 JP 6388285 B2 JP6388285 B2 JP 6388285B2 JP 2015040997 A JP2015040997 A JP 2015040997A JP 2015040997 A JP2015040997 A JP 2015040997A JP 6388285 B2 JP6388285 B2 JP 6388285B2
- Authority
- JP
- Japan
- Prior art keywords
- power
- charge
- discharge
- control
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/007—Regulation of charging or discharging current or voltage
- H02J7/007188—Regulation of charging or discharging current or voltage the charge cycle being controlled or terminated in response to non-electric parameters
- H02J7/007192—Regulation of charging or discharging current or voltage the charge cycle being controlled or terminated in response to non-electric parameters in response to temperature
- H02J7/007194—Regulation of charging or discharging current or voltage the charge cycle being controlled or terminated in response to non-electric parameters in response to temperature of the battery
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K25/00—Auxiliary drives
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
- B60W10/26—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means for electrical energy, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2062—Control of propulsion units
- E02F9/2075—Control of propulsion units of the hybrid type
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2091—Control of energy storage means for electrical energy, e.g. battery or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/246—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/24—Energy storage means
- B60W2710/242—Energy storage means for electrical energy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/24—Energy storage means
- B60W2710/242—Energy storage means for electrical energy
- B60W2710/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/40—Special vehicles
- B60Y2200/41—Construction vehicles, e.g. graders, excavators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/18—Propelling the vehicle
- B60Y2300/182—Selecting between different operative modes, e.g. comfort and performance modes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2306/00—Other features of vehicle sub-units
- B60Y2306/05—Cooling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/11—Electric energy storages
- B60Y2400/112—Batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/20—Energy converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/61—Arrangements of controllers for electric machines, e.g. inverters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/81—Braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/87—Auxiliary drives
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
- G01R31/382—Arrangements for monitoring battery or accumulator variables, e.g. SoC
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
- G01R31/392—Determining battery ageing or deterioration, e.g. state of health
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/93—Conjoint control of different elements
Description
最初に、図1を用いて、ハイブリッド式建設機械の構成を説明する。図1は、本発明の第1の実施形態によるハイブリッド式建設機械の構成図である。

図12は本発明の第2の実施形態に係るハイブリッドコントローラ22の構成を示す機能ブロック図である。
図14は本発明の第3の実施形態に係るハイブリッドコントローラ22の構成を示す機能ブロック図である。
2…走行体(油圧作業装置)
2A…走行用油圧モータ
3…旋回体(油圧作業装置)
3A1…旋回用油圧モータ
4…フロント作業機(油圧作業装置)
4A…ブーム
4a…ブームシリンダ
4B…アーム
4b…アームシリンダ
4C…バケット
4c…バケットシリンダ
5A…走行レバー
5B…操作レバー
5C…モード設定スイッチ(モード設定部)
5D…回転数設定ダイヤル
11…エンジン
12…エンジンコントローラ(ECU)
14…電動発電機
15…インバータ
16、26…蓄電装置
16A…リチウムイオン電池
16B…電流センサ
16C…バッテリコントローラ(BCU)
16C1…温度測定部
16C2…電圧測定部
16C3…電流測定部
16C4…SOC推定部
16C5…許容充放電電力演算部
16D…暖機用電池温度調整機器
16E…冷却用電池温度調整機器
17…油圧ポンプ
21…ポンプ容量調節装置
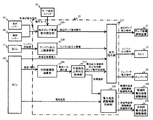
22…ハイブリッドコントローラ(HCU)
22A…油圧ポンプ要求動力推定部
22B…エンジン出力上限演算部
22C…充放電履歴演算部
22D…可逆抵抗上昇対応制御部
22E…電池温度調整機器制御部
22F…出力指令部
Claims (9)
- エンジンと、
力行時に前記エンジンの動力をアシストし、回生時に発電する電動発電機と、
前記エンジンの動力によって駆動され、圧油を吐出する油圧ポンプ装置と、
蓄電装置と、
前記力行時に前記蓄電装置からの直流電力を交流電力に変換して前記電動発電機に供給し、前記回生時に前記電動発電機で発電された交流電力を直流電力に変換して前記蓄電装置に供給する電力変換装置と、
前記蓄電装置の温度を調整する温度調整装置と、
前記蓄電装置の充放電履歴に応じて、前記蓄電装置の温度を上昇させるように前記温度調整装置を制御する第1の制御、前記電力変換装置から出力される電力を減少させるように前記電力変換装置を制御する第2の制御、前記油圧ポンプ装置の吐出流量を減少させるように前記油圧ポンプ装置を制御する第3の制御のうち少なくとも1つを実行する制御装置と、を備えたハイブリッド式建設機械であって、
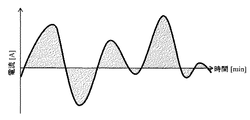
前記充放電履歴は、過去一定期間に測定された前記蓄電装置の充放電電流のデータであり、
前記データは、
前記充放電電流の電流値を含み、
前記制御装置は、
前記充放電電流の電流値が第1の閾値Ld以上となる期間と前記充放電電流の電流値が第1の閾値より小さい第2の閾値Lc以下となる期間の総和と前記過去一定期間との比を示す充放電実施時間比率を計算し、
前記充放電実施時間比率に応じて、前記第1〜第3の制御のうち少なくとも1つを実行する
ことを特徴とするハイブリッド式建設機械。 - 請求項1に記載のハイブリッド式建設機械であって、
前記制御装置は、
前記充放電電流の電流値が前記第1の閾値Ld以上となる期間及び前記充放電電流の電流値が前記第2の閾値Lc以下となる期間に、各期間に属するタイミングが現時点に近いほど大きい重み付けを付与する
ことを特徴とするハイブリッド式建設機械。 - 請求項1に記載のハイブリッド式建設機械であって、
前記制御装置は、
前記充放電実施時間比率が第3の閾値Rt_temp以上の場合、前記蓄電装置の目標温度に前記充放電実施時間比率の増加に応じて増加する値を設定し、及び、前記蓄電装置の温度が前記目標温度になるように、前記温度調整装置を制御することにより、前記第1の制御を実行する
ことを特徴とするハイブリッド式建設機械。 - 請求項1に記載のハイブリッド式建設機械であって、
前記制御装置は、
前記充放電実施時間比率が第4の閾値Rt_bat以上の場合、前記蓄電装置の出力の低減率に前記充放電実施時間比率の増加に応じて増加する値を設定し、前記前記蓄電装置の出力の低減率に基づいて、前記電力変換装置から出力される電力の指令値を設定し、及び、前記電力変換装置から出力される電力が前記前記指令値になるように前記電力変換装置を制御することにより、前記第2の制御を実行する
ことを特徴とするハイブリッド式建設機械。 - 請求項1に記載のハイブリッド式建設機械であって、
前記制御装置は、
前記充放電実施時間比率が第5の閾値Rt_pause以上の場合、前記電力変換装置を休止させることにより、前記第2の制御を実行する
ことを特徴とするハイブリッド式建設機械。 - 請求項1に記載のハイブリッド式建設機械であって、
前記制御装置は、
前記充放電実施時間比率が第6の閾値Rt_pump以上の場合、前記油圧ポンプ装置の動力の低減率に前記充放電実施時間比率の増加に応じて増加する値を設定し、前記油圧ポンプ装置の動力の低減率に基づいて、前記油圧ポンプ装置の動力の指令値を設定し、及び、前記油圧ポンプ装置の動力が前記指令値になるように前記油圧ポンプ装置を制御することにより、前記第3の制御を実行する
ことを特徴とするハイブリッド式建設機械。 - 請求項1に記載のハイブリッド式建設機械であって、
前記制御装置は、
前記蓄電装置の温度が第1の温度以下の場合に、前記第1の制御を実行する
ことを特徴とするハイブリッド式建設機械。 - 請求項7に記載のハイブリッド式建設機械であって、
前記制御装置は、
前記蓄電装置の温度が前記第1の温度より大きい第2の温度以上の場合に、前記蓄電装置の温度を降下させるように前記温度調整装置を制御する第4の制御を実行する
ことを特徴とするハイブリッド式建設機械。 - 請求項1に記載のハイブリッド式建設機械であって、
前記制御装置は、
前記第1〜第3の制御のうち、前記第1の制御を実行する
ことを特徴とするハイブリッド式建設機械。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015040997A JP6388285B2 (ja) | 2015-03-03 | 2015-03-03 | ハイブリッド式建設機械 |
| KR1020150171173A KR101768339B1 (ko) | 2015-03-03 | 2015-12-03 | 하이브리드식 건설 기계 |
| US14/990,822 US9744962B2 (en) | 2015-03-03 | 2016-01-08 | Hybrid construction machine |
| CN201610019386.XA CN105936267B (zh) | 2015-03-03 | 2016-01-12 | 混合动力式工程机械 |
| EP16155059.5A EP3064652B1 (en) | 2015-03-03 | 2016-02-10 | Hybrid construction machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015040997A JP6388285B2 (ja) | 2015-03-03 | 2015-03-03 | ハイブリッド式建設機械 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016160667A JP2016160667A (ja) | 2016-09-05 |
| JP2016160667A5 JP2016160667A5 (ja) | 2017-09-14 |
| JP6388285B2 true JP6388285B2 (ja) | 2018-09-12 |
Family
ID=55650025
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015040997A Active JP6388285B2 (ja) | 2015-03-03 | 2015-03-03 | ハイブリッド式建設機械 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9744962B2 (ja) |
| EP (1) | EP3064652B1 (ja) |
| JP (1) | JP6388285B2 (ja) |
| KR (1) | KR101768339B1 (ja) |
| CN (1) | CN105936267B (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6469381B2 (ja) * | 2014-07-28 | 2019-02-13 | 日立建機株式会社 | ハイブリッド式作業機 |
| JP6176226B2 (ja) * | 2014-12-01 | 2017-08-09 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| CN107208547B (zh) * | 2015-01-30 | 2019-11-26 | 三菱重工业株式会社 | 增压系统、增压系统用控制装置及增压系统的运转方法 |
| JP6587538B2 (ja) * | 2015-12-25 | 2019-10-09 | 日立建機株式会社 | ハイブリッド式建設機械 |
| JP6683949B2 (ja) * | 2016-03-30 | 2020-04-22 | 三菱自動車工業株式会社 | 車両の走行駆動装置 |
| JP6730667B2 (ja) * | 2016-03-30 | 2020-07-29 | 三菱自動車工業株式会社 | 車両の走行駆動装置 |
| JP6647963B2 (ja) | 2016-05-18 | 2020-02-14 | 日立建機株式会社 | 建設機械 |
| JP6740793B2 (ja) * | 2016-08-05 | 2020-08-19 | トヨタ自動車株式会社 | 車載電源制御装置 |
| KR102035517B1 (ko) | 2016-09-29 | 2019-10-24 | 히다찌 겐끼 가부시키가이샤 | 하이브리드 건설 기계 |
| JP6630257B2 (ja) | 2016-09-30 | 2020-01-15 | 日立建機株式会社 | 建設機械 |
| JP7013826B2 (ja) * | 2017-12-05 | 2022-02-01 | トヨタ自動車株式会社 | ハイブリッド自動車およびこれに搭載される制御装置 |
| JP7048364B2 (ja) * | 2018-03-14 | 2022-04-05 | トヨタ自動車株式会社 | ハイブリッド車両および、その制御方法 |
| CN109103541A (zh) * | 2018-07-03 | 2018-12-28 | 北京长城华冠汽车科技股份有限公司 | 一种新能源车辆串联式热管理系统和新能源汽车 |
| CN111216600B (zh) * | 2018-11-27 | 2024-04-16 | 中信国安盟固利动力科技有限公司 | 一种可调加热速度的电池系统及其控制方法 |
| IT201900008010A1 (it) * | 2019-06-04 | 2020-12-04 | Cifa Spa | Apparato di sollevamento mobile |
| US11691526B2 (en) * | 2020-04-14 | 2023-07-04 | Caterpillar Paving Products Inc. | Mobile charging station |
| KR20230009429A (ko) * | 2020-06-16 | 2023-01-17 | 현대두산인프라코어(주) | 건설기계용 하이브리드 발전전력 측정시스템 |
| US11161415B1 (en) * | 2020-09-28 | 2021-11-02 | Oshkosh Corporation | System and method for electronic power take-off controls |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003197269A (ja) * | 2001-12-25 | 2003-07-11 | Honda Motor Co Ltd | 蓄電池の温度制御装置及び車両駆動装置 |
| JP4952031B2 (ja) * | 2006-04-14 | 2012-06-13 | トヨタ自動車株式会社 | 電源装置および電源装置における入出力制限設定方法並びに車両およびその制御方法 |
| JP5076378B2 (ja) * | 2006-07-03 | 2012-11-21 | マツダ株式会社 | バッテリの温度制御装置 |
| JP5036662B2 (ja) * | 2008-09-03 | 2012-09-26 | トヨタ自動車株式会社 | 二次電池の監視装置及び二次電池システム |
| JP5297751B2 (ja) * | 2008-10-03 | 2013-09-25 | 株式会社日立製作所 | 電源制御装置、車両走行制御システム及び蓄電池劣化状態検知方法 |
| JP2010127271A (ja) * | 2008-12-01 | 2010-06-10 | Sumitomo Heavy Ind Ltd | ハイブリッド式建設機械の暖機方法 |
| CN102272389B (zh) * | 2009-01-07 | 2015-01-21 | 住友重机械工业株式会社 | 混合式施工机械的暖机方法及混合式施工机械 |
| CN102301561B (zh) * | 2009-01-28 | 2015-03-11 | 住友重机械工业株式会社 | 混合式工作机械及蓄电控制装置 |
| JP5043061B2 (ja) * | 2009-03-30 | 2012-10-10 | 本田技研工業株式会社 | 電気自動車 |
| US20110144840A1 (en) * | 2009-12-15 | 2011-06-16 | Ise Corporation | Expandable Energy Storage Control System and Method |
| JP4923116B2 (ja) * | 2010-01-29 | 2012-04-25 | 株式会社日立製作所 | 二次電池システム |
| JP5425721B2 (ja) * | 2010-06-22 | 2014-02-26 | 住友重機械工業株式会社 | ハイブリッド型作業機械 |
| EP2628860B1 (en) * | 2010-10-15 | 2019-07-03 | Hitachi Construction Machinery Co., Ltd. | Hybrid construction machine |
| JP2013037859A (ja) * | 2011-08-05 | 2013-02-21 | Toshiba Corp | 蓄電池装置 |
| CN102501849A (zh) * | 2011-12-22 | 2012-06-20 | 山河智能装备股份有限公司 | 一种混合动力叉车驱动与能量回收系统 |
| JP6013857B2 (ja) * | 2012-09-28 | 2016-10-25 | 株式会社神戸製鋼所 | 建設機械用二次電池充放電制御装置 |
| JP5660102B2 (ja) * | 2012-10-16 | 2015-01-28 | トヨタ自動車株式会社 | 車両の電源装置 |
| US9787126B2 (en) * | 2013-02-08 | 2017-10-10 | Semiconductor Energy Laboratory Co., Ltd. | Driving method of electrochemical device |
| JP6232795B2 (ja) * | 2013-07-18 | 2017-11-22 | コベルコ建機株式会社 | ハイブリッド建設機械 |
| JP5765375B2 (ja) * | 2013-07-25 | 2015-08-19 | トヨタ自動車株式会社 | 制御装置及び制御方法 |
| JP5862631B2 (ja) * | 2013-10-08 | 2016-02-16 | トヨタ自動車株式会社 | 蓄電システム |
| DE102015001050A1 (de) * | 2015-01-29 | 2016-08-04 | Man Truck & Bus Ag | Verfahren und Vorrichtung zur Steuerung und/oder Regelung mindestens eines einen Alterungszustand eines elektrischen Energiespeichers beeinflussenden Betriebsparameters des elektrischen Energiespeichers |
-
2015
- 2015-03-03 JP JP2015040997A patent/JP6388285B2/ja active Active
- 2015-12-03 KR KR1020150171173A patent/KR101768339B1/ko active IP Right Grant
-
2016
- 2016-01-08 US US14/990,822 patent/US9744962B2/en active Active
- 2016-01-12 CN CN201610019386.XA patent/CN105936267B/zh active Active
- 2016-02-10 EP EP16155059.5A patent/EP3064652B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR101768339B1 (ko) | 2017-08-14 |
| EP3064652B1 (en) | 2021-10-13 |
| CN105936267B (zh) | 2019-04-30 |
| KR20160107092A (ko) | 2016-09-13 |
| US20160257293A1 (en) | 2016-09-08 |
| US9744962B2 (en) | 2017-08-29 |
| CN105936267A (zh) | 2016-09-14 |
| JP2016160667A (ja) | 2016-09-05 |
| EP3064652A1 (en) | 2016-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6388285B2 (ja) | ハイブリッド式建設機械 | |
| JP6300943B2 (ja) | ハイブリッド式建設機械 | |
| US7525206B2 (en) | Power source device for working machine | |
| US9187294B2 (en) | Hybrid construction machine and method for controlling the same | |
| US9540790B2 (en) | Work machine | |
| CN108137035B (zh) | 混合动力工程机械 | |
| EP2826920B1 (en) | Hybrid construction machine | |
| JP6159681B2 (ja) | ハイブリッド作業機械 | |
| JP2015059816A (ja) | 電池容量推定装置及び電池容量推定方法 | |
| JP2019001461A (ja) | ショベル | |
| US9441345B2 (en) | Hybrid excavator and method of controlling hybrid excavator | |
| JP6245828B2 (ja) | 作業機械及び作業機械の制御方法 | |
| JP6341813B2 (ja) | ハイブリッド式建設機械 | |
| KR101703484B1 (ko) | 동력 제어 장치 및 이를 구비한 하이브리드 건설 기계 | |
| JP2015059814A (ja) | Soc推定装置及びsoc推定方法 | |
| JP2017043923A (ja) | ハイブリッド建設機械 | |
| JP6578216B2 (ja) | ハイブリッド式建設機械 | |
| WO2024090160A1 (ja) | 電動式作業機械 | |
| JP6695231B2 (ja) | ハイブリッド式建設機械 | |
| JP6636627B2 (ja) | ハイブリッド建設機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170801 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170801 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180427 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180515 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180710 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180724 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180807 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6388285 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |